30
Slide 1 Finish Search Jim Little UBC CS 322 – Search 7 September 24, 2014 Textbook §3.6

Slide 1
Finish SearchJim Little
UBC CS 322 – Search 7September 24, 2014
Textbook §3.6

Slide 2
Lecture Overview• Finish MBA*• Pruning Cycles and Repeated
states Examples• Dynamic Programming• Search Recap
Slide 3
Heuristic value by look ahead

Slide 4
Memory-bounded A*
• Iterative deepening A* and B & B use a tiny amount of memory
• what if we've got more memory to use?• keep as much of the fringe in memory as we can• if we have to delete something:
• delete the worst paths ( )• ``back them up'' to a common ancestor
p
pnp1
highest f
Slide 5
MBA*: Compute New h(p)
Slide 6
Lecture Overview• Finish MBA*• Interlude: State Space/Search
Graphs• Pruning Cycles and Repeated
states Examples• Dynamic Programming• Search Recap

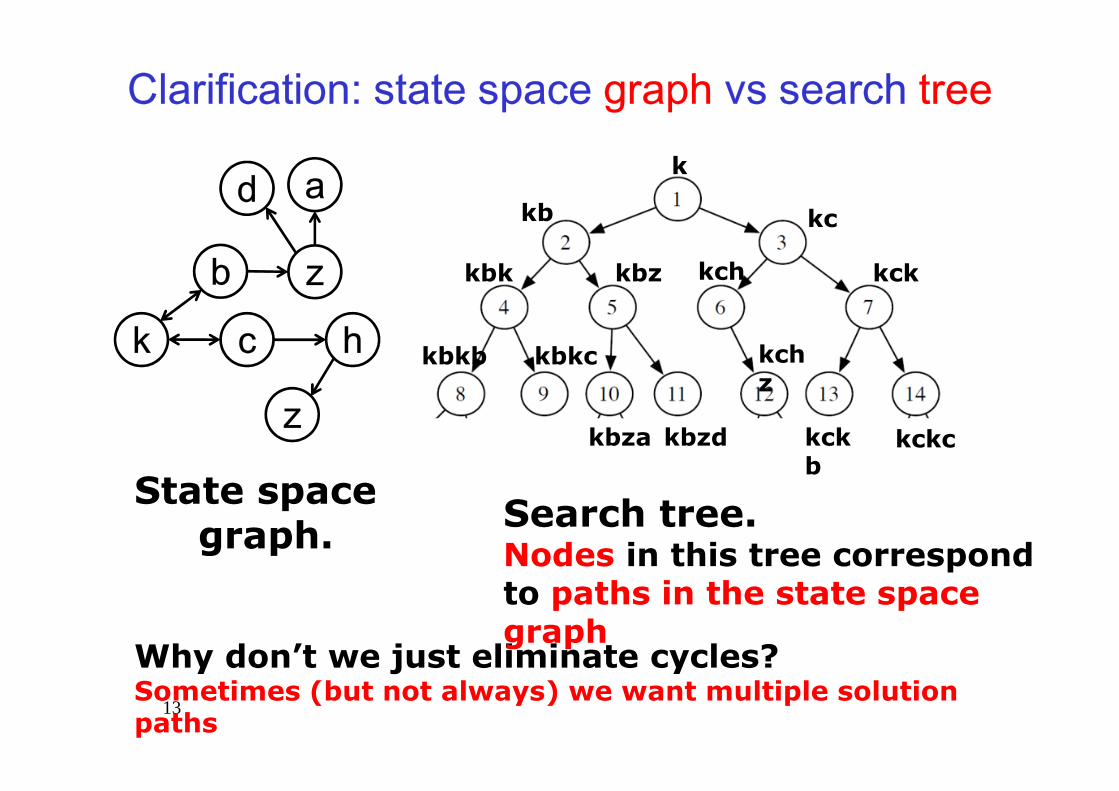
Clarification: state space graph vs search tree
7
k c
b z
h
akb kc
kbz
d
fkbza kbzd
kch
k
State space graph.
If there are no cycles, the two look the same
Search tree.Nodes in this tree correspond to paths in the state space graph
kchfy
4 5
6 7 8

Clarification: state space graph vs search tree
8
k c
b z
h
akb kc
kbz
d
fkbza kbzd
kch
k
State space graph.
Search tree.
kchf
4 5
6 7 8
8
The numbers in the search tree’s nodes mean?Node’s name
Order in which a search algo. (here: BFS) expands nodes

Clarification: state space graph vs search tree
9
k c
b z
h
akb kc
kbk kbz
d
fkbkb kbkc
kbza kbzd
kch
kchf
kckb
kckc
kck
k
State space graph.
Search tree. (only first 3 levels, of
BFS)• If there are cycles, the two look very different

Clarification: state space graph vs search tree
10
k c
b z
h
akb kc
kbk kbz
d
fkbkb kbkc
kbza kbzd
kch
kchf
kckb
kckc
kck
k
State space graph.
Search tree. (only first 3 levels, of
BFS)
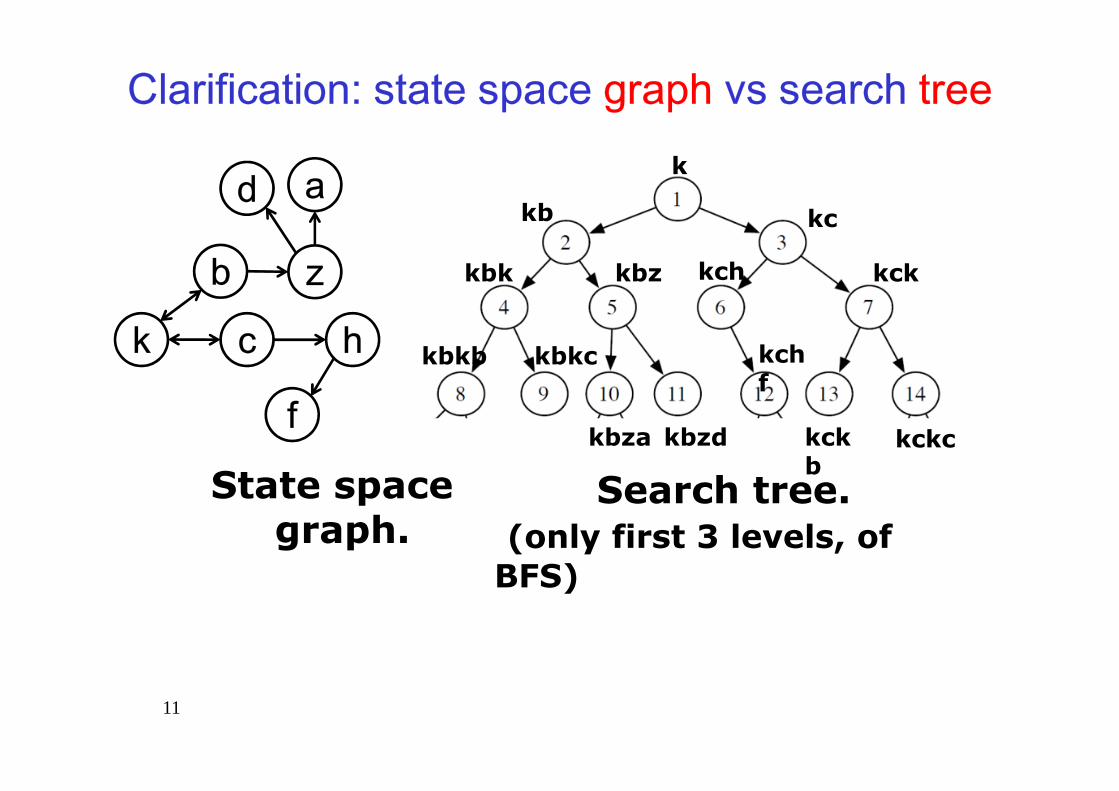
Clarification: state space graph vs search tree
11
k c
b z
h
akb kc
kbk kbz
d
fkbkb kbkc
kbza kbzd
kch
kchf
kckb
kckc
kck
k
State space graph.
Search tree. (only first 3 levels, of
BFS)

Clarification: state space graph vs search tree
12
k c
b z
h
akb kc
kbk kbz
d
zkbkb kbkc
kbza kbzd
kch
kchz
kckb
kckc
kck
k
State space graph.
May contain cycles!
Search tree.Nodes in this tree correspond to paths in the state space graph
(if multiple start nodes: forest)
Cannot contain cycles!
Clarification: state space graph vs search tree
13
k c
b z
h
akb kc
kbk kbz
d
zkbkb kbkc
kbza kbzd
kch
kchz
kckb
kckc
kck
k
State space graph.
Why don’t we just eliminate cycles?Sometimes (but not always) we want multiple solution paths
Search tree.Nodes in this tree correspond to paths in the state space graph
Slide 14
Lecture Overview• Finish MBA*• Pruning Cycles and Repeated
states Examples• Dynamic Programming• Search Recap

Slide 15
Multiple-Path Pruning & Optimal Solutions
Problem: what if a subsequent path to n is shorter than the first path to n ?
• You can remove all paths from the frontier that use the longer path. (as these can’t be optimal)

Slide 16
Multiple-Path Pruning & Optimal Solutions
Problem: what if a subsequent path to n is shorter than the first path to n ?
• You can change the initial segment of the paths on the frontier to use the shorter path.

Pruning Cycles
Slide 17
Repeated States
Example

Slide 18
Lecture Overview• Finish MBA*• Pruning Cycles and Repeated
states Examples• Dynamic Programming• Search Recap

Dynamic Programming• Idea: for statically stored graphs, build a table of dist(n):
• The actual distance of the shortest path from node n to a goal g
• This is the perfect
• dist(g) = 0• dist(z) = 1• dist(c) = 3• dist(b) = 4• dist(k) = ?
• dist(h) = ?
• How could we implement that?
k c
b h
g
z
2
3
1
2
4
1
7 ∞6
7 ∞6
heuristiccostf function
Slide 19

Slide 20
This can be built backwards from the goal:
Dynamic Programming
( )
+=∈ otherwisemdistmn
ngoalisifndist
Amn )(),(costmin
),(_0)(
,
a
b
cg
2
31
3
g
b
c
a
2d
1
2
����(�)
= �� 2 + 0 = 2
= �� 3 + 0 = 3
= �� 3 + 3 , (1 + 2) = 3
0m
Slide 21
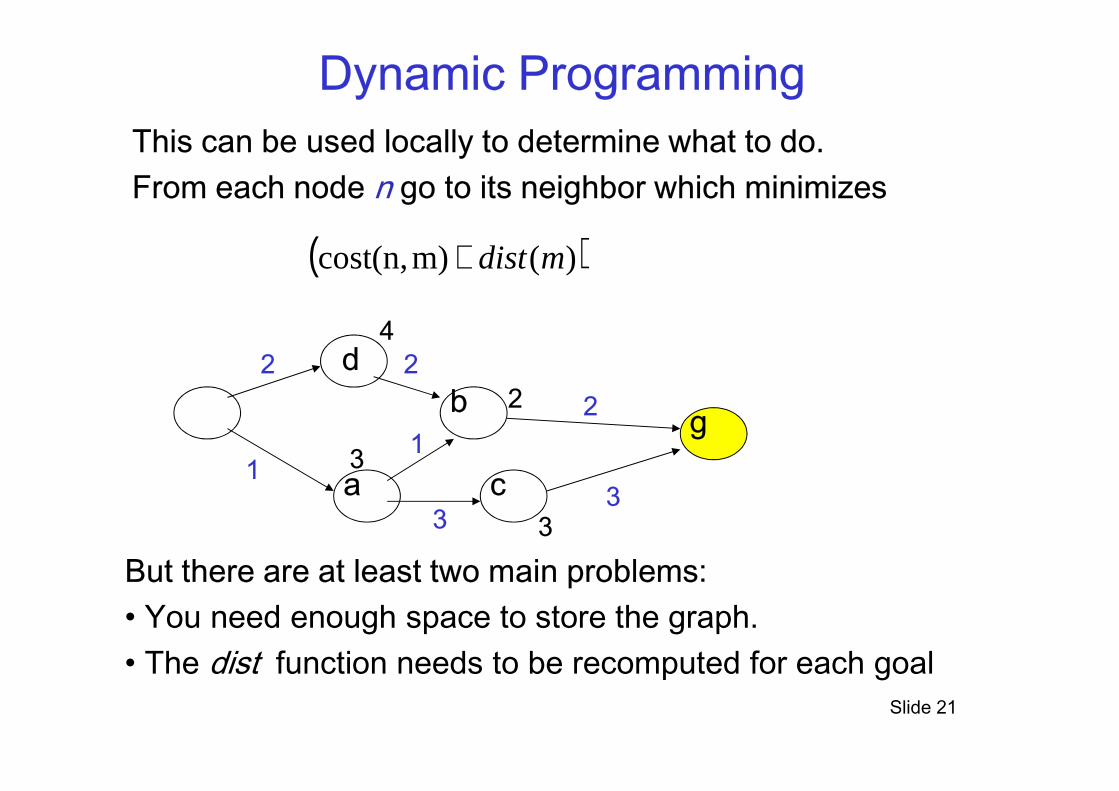
But there are at least two main problems:• You need enough space to store the graph.• The dist function needs to be recomputed for each goal
Dynamic ProgrammingThis can be used locally to determine what to do.From each node n go to its neighbor which minimizes
a
b
c
g2
3
4
3
d
3
21
3
( ))(m)cost(n, mdist+
2
1
2

Slide 22
Lecture Overview• Finish MBA*• Pruning Cycles and Repeated
states Examples• Dynamic Programming• Search Recap

Slide 23
Recap SearchSelection Complete Optimal Time Space
DFS LIFO N N O(bm) O(mb)BFS FIFO Y Y O(bm) O(bm)
IDS(C) LIFO Y Y O(bm) O(mb)
LCFS min cost Y Y O(bm) O(bm)
BFS min h N N O(bm) O(bm)A* min f Y Y O(bm) O(bm)
B&B LIFO + pruning
N Y O(bm) O(mb)
IDA* LIFO Y Y O(bm) O(mb)
MBA* min f N Y O(bm) O(bm)

Slide 24
Recap Search (some qualifications)Complete Optimal Time Space
DFS N N O(bm) O(mb)BFS Y Y O(bm) O(bm)
IDS(C) Y Y O(bm) O(mb)
LCFS Y Y ? O(bm) O(bm)
BFS N N O(bm) O(bm)A* Y Y ? O(bm) O(bm)
B&B N Y ? O(bm) O(mb)
IDA* Y Y O(bm) O(mb)
MBA* N Y O(bm) O(bm)
C>0
h admiss.
no inf path

Slide 25
Search in PracticeComplete Optimal Time Space
DFS N N O(bm) O(mb)BFS Y Y O(bm) O(bm)
IDS(C) Y Y O(bm) O(mb)
LCFS Y Y O(bm) O(bm)
BFS N N O(bm) O(bm)A* Y Y O(bm) O(bm)
B&B N Y O(bm) O(mb)
IDA* Y Y O(bm) O(mb)
MBA* N Y O(bm) O(bm)
BDS Y Y O(bm/2) O(bm/2)
Slide 26
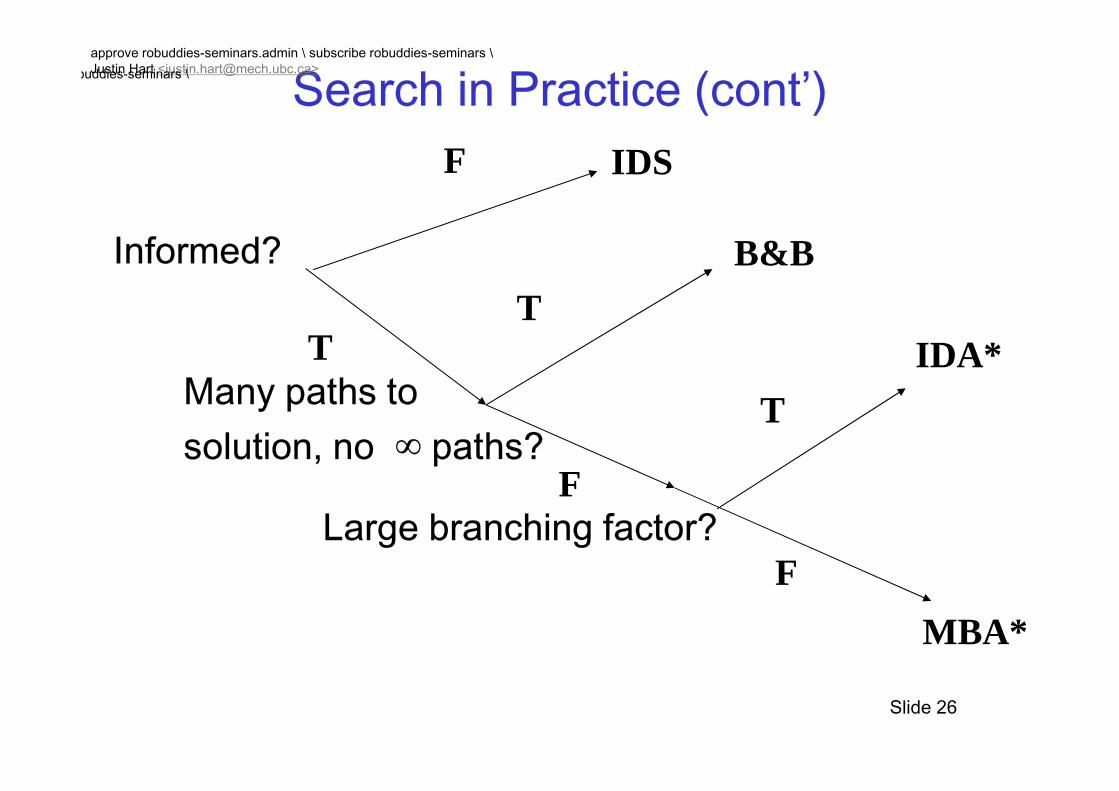
Search in Practice (cont’)
Many paths to solution, no ∞ paths?
Informed?
Large branching factor?
F
T
approve robuddies-seminars.admin \ subscribe robuddies-seminars \Justin Hart <[email protected]>
T
subscribe robuddies-seminars \
T
F
F
IDS
B&B
MBA*
IDA*
Slide 27
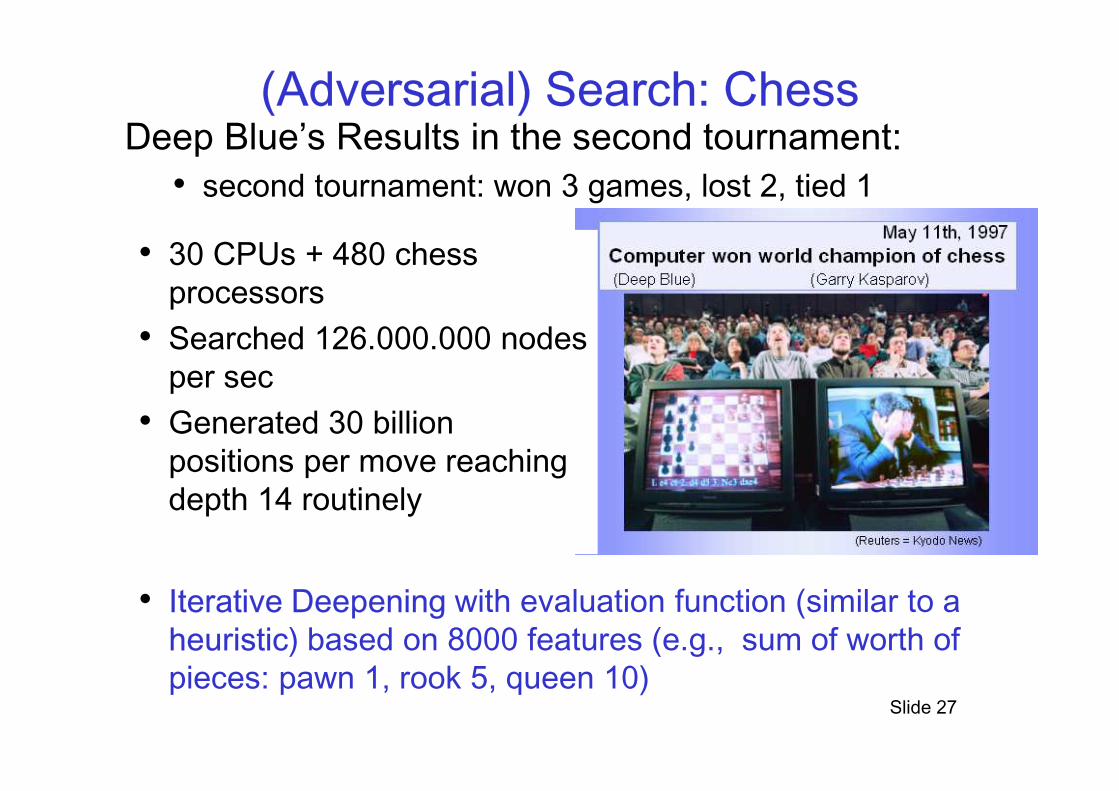
(Adversarial) Search: ChessDeep Blue’s Results in the second tournament:
• second tournament: won 3 games, lost 2, tied 1
• 30 CPUs + 480 chess processors
• Searched 126.000.000 nodes per sec
• Generated 30 billion positions per move reaching depth 14 routinely
• Iterative Deepening with evaluation function (similar to a heuristic) based on 8000 features (e.g., sum of worth of pieces: pawn 1, rook 5, queen 10)

Slide 28
Modules we'll cover in this course: R&RsysEnvironment
Problem
Query
Planning
Deterministic Stochastic
Search
Arc Consistency
Search
SearchValue Iteration
Var. Elimination
Constraint Satisfaction
Logics
STRIPS
Belief Nets
Vars + Constraints
Decision Nets
Markov ProcessesVar. Elimination
Static
Sequential
RepresentationReasoningTechnique
Slide 29
Standard Search vs. Specific R&R systemsConstraint Satisfaction (Problems):
• State• Successor function• Goal test• Solution• Heuristic function
Planning : • State• Successor function• Goal test• Solution• Heuristic function
Inference• State• Successor function• Goal test• Solution• Heuristic function

Slide 30
Next class
Start Constraint Satisfaction Problems (CSPs)Textbook 4.1-4.3

















