103
| Date post: | 03-Aug-2018 |
| Category: |
Documents |
| Upload: | vuongtuong |
| View: | 214 times |
| Download: | 0 times |



Moncrief-O’Donnell Chair, UTA Research Institute (UTARI)The University of Texas at Arlington, USA
and
F.L. Lewis, NAI
Talk available online at http://www.UTA.edu/UTARI/acs
Neural Networks for Control of Nonlinear Processes and Systems
Supported by :China Qian Ren Program, NEUChina Education Ministry Project 111 (No.B08015)NSF, ONR
Qian Ren Consulting Professor, State Key Laboratory of Synthetical Automation for Process Industries,
Northeastern University, Shenyang, China

Automation & Robotics Research Institute (ARRI)The University of Texas at Arlington
F.L. LewisMoncrief-O’Donnell Endowed Chair
Head, Controls & Sensors Group
Talk available online at http://ARRI.uta.edu/acs
Nonlinear Network Structures for Feedback Control:Part I- Adaptive, Robust, & Neural Net Control
Supported by :NSF - PAUL WERBOSARO – RANDY ZACHERY

Tianyou Chai
Jialu FanJinliang Ding

He who exerts his mind to the utmost knows nature’s pattern.
The way of learning is none other than finding the lost mind.
Meng Tz500 BC
Man’s task is to understand patterns innature and society.
Mencius

Importance of Feedback Control
Darwin 1850- FB and natural selectionVito Volterra 1890- FB and fish population balanceAdam Smith 1760- FB and international economyJames Watt 1780- FB and the steam engineFB and cell homeostasis
The resources available to most species for their survival are meager and limited
Nature uses Optimal control

Feedback Control Systems
Aircraft autopilotsCar engine controlsShip controllersCompute Hard disk drive controllersIndustry process control – chemical, manufacturingRobot control
Industrial Revolution –Windmill control, British millwrights - 1600sSteam engine and prime movers
James Watt 1769SteamshipSteam Locomotive boiler control
Sputnik 1957Aerospace systems

Relevance- Machine Feedback Control
qd
qr1qr2
AzEl
barrel flexiblemodes qf
compliant coupling
moving tank platform
turret with backlashand compliant drive train
terrain andvehicle vibrationdisturbances d(t)
Barrel tipposition
qd
qr1qr2
AzEl
barrel flexiblemodes qf
compliant coupling
moving tank platform
turret with backlashand compliant drive train
terrain andvehicle vibrationdisturbances d(t)
Barrel tipposition
Vehicle mass m
ParallelDamper
mc
activedamping
uc(if used)
kc cc
vibratory modesqf(t)
forward speedy(t)
vertical motionz(t)
surface roughness(t)
k c
w(t)
Series Damper+
suspension+
wheel
Single-Wheel/Terrain System with Nonlinearities
High-Speed Precision Motion Control with unmodeled dynamics, vibration suppression, disturbance rejection, friction compensation, deadzone/backlash control
VehicleSuspension
IndustrialMachines
Satellite pointing Land Systems
Aerospace

Relevance- Industrial Process ControlPrecision Process Control with unmodeled dynamics, disturbance rejection, time-varying parameters, deadzone/backlash control
ChemicalVaporDeposition
IndustrialMachines
XY Table
Autoclave

Newton’s Law
v(t)
x(t)
F(t)m
)()( tum
tFx
xmmaF
Industrial Process and Motion Systems (Vehicles, Robots)
τqB)+τq+G(q)+F(q)q(q,+Vq)qM( dm )(
Coriolis/centripetalforce
gravity friction disturbances
Actuatorproblems
inertia
Control Input
Lagrange’s Eqs. Of Motion
Lagrange Dynamical systems

Dynamical System Models
)()()(
xhyuxgxfx
Nonlinear system
Continuous-Time Systems Discrete-Time Systems
)()()(1
kk
kkkk
xhyuxgxfx
Linear system
CxyBuAxx
kk
kkk
CxyBAxx
1
1/s
f(x)
h(x)g(x)
z-1
xx yu
Control Inputs Internal States Measured Outputs

Issues in Feedback Control
system
Feedbackcontroller
Feedforwardcontroller
Measured outputs
Control inputs
Desired trajectories
Sensornoise
Disturbances
StabilityTracking BoundednessRobustness
to disturbancesto unknown dynamics
Unknown Process dynamicsProcess NonlinearitiesUnknown Disturbances

plant
controlu(t)
outputy(t)
controller
systemidentifier estimated
output
)(ˆ ty
identificationerror
desiredoutput
)(tyd
plant
controlu(t)
outputy(t)
controllerdesiredoutput
)(tyd
trackingerror
plant
controlu(t)
outputy(t)
controller #1
controller #2
desiredoutput
)(tyd
trackingerror
Indirect Scheme
Controller Topologies
Direct Scheme
Feedback/FeedforwardScheme

Feedback LinearizationAdaptive ControlNeural Networks for ControlNeural-adaptive ControlHigh Frequency Vibratory ModesFriction CompensationActuator Nonlinearities
DeadzoneBacklash
Neuro-fuzzy Control
6 US PatentsSponsored by:China Qian RenChina Project 111US NSF, ARO, ONR, AFOSR

Definitions of System Stability
xe
xe+B
xe-B
Const Bound B
tt0 t0+T
T
x(t)
x(t)
t
x(t)
t
Asymptotic Stability Marginal or Bounded Stability
Uniform Ultimate Boundedness
)()(
1 kk xfxxfx
d
B(d)

21 2
1y us a s a
Example 1. Linear System
1 2y a y a y u
desired to track a reference input ( )dy t
de y y Tracking error
1 2de y a y a y u
r e e Sliding variable
1 2dr e e y e a y a y u
du v y e Auxiliary input
1 2r a y a y v Error dynamics
Of the form ( )r f x v
1 2 1 2( ) ( )Tyf x a y a y a a W x
y
Unknown function
Feedback Linearization
Unknown parameters
Known Regression Vector

Example 2. Nonlinear Lagrange System( , ) ( )y d y y k y u
unknown nonlinear damping term unknown nonlinear friction
( )r f x v
( ) ( , ) ( )f x d y y k y with
Assume Linear in the Parameters (LIP)
1
1
( , )( ) ( )
( , )Td y y
f x D K W xk y y
Known possibly nonlinear regression function
Unknown parameters
desired to track a reference input ( )dy t
de y y Tracking error
( , ) ( )de y d y y k y u
r e e Sliding variable
Error dynamicsdu v y e Auxiliary input
Feedback Linearization
Lagrangian System Appears in:Process controlMechanical systemsRobots

plantr(t)
Feedback Linearization Controller
A dynamic controller
du v y e
u
yy d
d
yy e
e
I
r e e
e v?
controller
The equations give the FB controller structure
Feedforward terms
Tracking Loop

Adaptive Control
Error Dynamics
( )r f x v r(t)= control errorControl input
Unknown nonlinearities
( )Tr W x v
Error Dynamics
Assume: f(x) is known to be of the structure
( ) ( )Tf x W x
LINEAR-IN-THE-PARAMETERS (LIP)
Known basis set= regression vector – DEPENDS ON THE SYSTEM
Unknown parameter vector

Controller
ˆ ˆ( ) ( ) ( )Tv vv f x K r W t x K r
ˆ( ) ( )W t W W t Parameter estimation error
ˆ( ) ( ) ( )T T Tvr W x v W x W x K r
( )Tvr W x K r
closed-loop system becomes
Est. error drives the control error
ˆ ˆ ( ) TdW W F x rdt
Parameter estimate is updated (tuned) using the adaptive tuning law
Adaptive Control
Pos. def. control gain
ESTIMATE of unknown parameters

plantr(t)
Feedback Linearization Adaptive ControllerA dynamic controller
du v y e
u
yy d
d
yy
ee
I
r e e
e
v
The equations give the FB controller structure
ˆ ˆ( ) ( ) ( )Tv vv f x K r W t x K r
vK
ˆ ( ) TW F x rˆ ( ) ( )TW t x
ˆ ( )f x
Tunable inner loop
Tracking Loop
Feedback terms

Error dynamics
f(x)
Kv
^
Adaptive ControlTuning
Dynamics
r(t)
Adaptive Controller
Adaptive Controller
ˆ ( ) TW F x r
A dynamic controller

Adaptive ControlPerformance of Adaptive Controller: Using the adaptive controller, the closed-loop
system is asymptotically stable, i.e. the control error r(t) goes to zero.
If an additional Persistence of Excitation (PE) condition holds, the parameter estimates converge to the actual unknown parameters.
11 12 2 { }T TL r r tr W F W
Proof:
1{ }T TL r r tr W F W
1 1( ) { } { ( ) }T T T T T Tv vL r W x K r tr W F W r K r tr W F W x r
ˆ ( ) TW F x r ( ) TW F x r
( )Tvr W x K r Error dynamics
Parameter tuning law
TvL r K r
Therefore Lyapunov shows that
0
0
( ), ( )r t W t are bounded( ), ( )r t W t
or

Adaptive Control
Barbalat’s Lemma
( ) ( ) Tv
t t
L t L d r K r d
Is bounded so that 0Tvr K r
Get more information about stability
TvL r K r

Parameter Convergence and Persistence of Excitation:
( ) TW F x r
( )Tvr W x K r
Error dynamics
( ) ( )Tvz t W x r K r
So thatIs bounded
Dynamics of param. est. error
( ) ( ) ( )T T Tvz t x W r K r .
( ) 0, ( ) 0r t r t Lyapunov showed that so input and output go to zero
So the state ( )W t goes to zero if the system is uniformly completely observable
1 2( ( )) ( ( ))t T
T
t
I x x d I
This is the same as a persistence of excitation condition on the regression vector
Therefore, if ( )x is PE, the parameters converge.
Adaptive Control

Typical Behavior of Adaptive Controllers
Control errors go to zero and the parameter estimates converge.
This assumes that ( ) ( )Tf x W x holds exactly, and that there are no disturbances in the system.

( )r f x Error dynamics
Control input
Unknown nonlinearities
Assume
know a fixed nominal value or estimate ˆ ( )f x for unknown f(x),
ˆ( ) ( )f f x f x
( ) ( )f x F x
estimation error is bounded like
Known bounding function, maybe nonlinear
ˆ ( ) v rf x K r v
Controller
( ) ,
( ) ,r
F xr rr
vF xr r
Robust Control

Error dynamics
Robust ControlTerm vr(t)
f(x)
Kv
^
Robust Controller
FixedNominal ControlTerm
r(t)
Robust Controller
A NON Dynamic controller

Closed-loop Error dynamics
ˆ( ) ( ) ( ) v rr f x f x f x K r v
( ) v rr f x K r v
r
Performance of Robust Controller:With this control, the closed-loop system is bounded stable with
bounded with a magnitude near
Proof:12
TL r r
TL r r
( ) ( )T T Tv r v rL r f x K r v r K r r f x v
2min ( ) ( ) T
v rL K r r F x r v
2 2min
2min
( ) ( ) ( ) /
( )
v
v
L K r r F x r F x r
K r
r Case 1:
0
2 2min
2min
( ) ( ) ( ) /
( ) ( ) 1 /
v
v
L K r r F x r F x
K r r F x r
Case 2: r
indefinite
( ) ,
( ) ,r
F xr rr
vF xr r

Typical Behavior of Robust Controllers
Control error does not go to zero but does indeed stay small.
Robust ControlAdaptive Control

Robot System[I]
Robust ControlTerm
v(t)
qd
Tracking Loop
f(x)
rKv
Nonlinear Inner Loop
..
^
Multiloop Nonlinear Controller Structure
q = qq.e =
ee.
qd =qdqd.
Adaptive ControlTerm
Adaptive plus robust control
( ) ,
( ) ,r
F xr rr
vF xr r
ˆ ( ) TW F x r

Neural Networks for Control

F.L. Lewis, S. Jagannathan, and A.Yesildirek,Neural Network Control of RobotManipulators and Nonlinear Systems,Taylor and Francis, London, 1999.
NN control in Chapter 4

Use Biological Structures to Improve Adaptive Control
Adaptive control needs a Linear in the Parameters (LIP) Asumption
ˆ ˆ( ) ( ) ( )Tf x W t x
Nonlinear Basis Set depending on each different systemMust be computed for each system
Unknown parameters

Neural Network Properties
Learning
Recall
Function approximation
Generalization
Classification
Association
Pattern recognition
Clustering
Robustness to single node failure
Repair and reconfiguration
Nervous system cell. http://www.sirinet.net/~jgjohnso/index.html

Two-layer feedforward static neural network (NN)
(.)
(.)
(.)
(.)
x1
x2
y1
y2
VT WT
Inputs
Hidden layer
Outputs
xn ym
1
2
3
L
(.)
(.)
(.)
Summation eqs Matrix eqs( )( )
T T
T
y W V xW x
K
ki
n
jkjkjiki wvxvwy
10
10
Extra freedom to select basis set by tuning first-layer weights V.

Neural Network Universal Approximation Property
Let f(x) be any smooth nonlinear function
Then f(x) can be approximated by
1
( ) ( ) ( )L
i ii
f x w x x
For appropriate choice of the basis functions ( ), 1,i x i L
Moreover, the approximation error goes uniformly to zero as ( )x L
This was shown by Weierstrass for polynomial bases functions (Taylor series)
Hornik and Stinchcomb, Sandberg showed that is bounded on a compact set For a large class of approximating functions
( )x
Need to find the unknown weights
Do this by NN learning – tuning the NN weights
iw

Common activation functions (.)
Nonlinear System[I]
Unity-Gain Tracking Loop
rKv
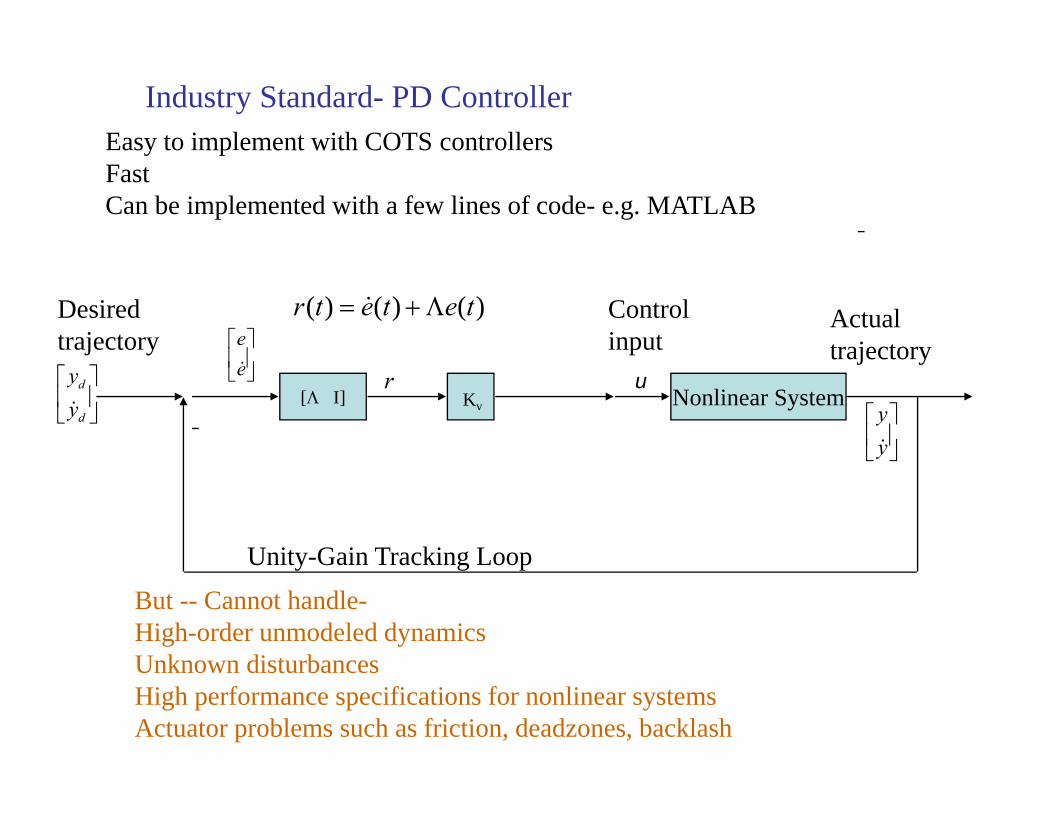
Industry Standard- PD Controller
)()()( tetetr Desiredtrajectory
Actualtrajectory
Easy to implement with COTS controllersFastCan be implemented with a few lines of code- e.g. MATLAB
But -- Cannot handle-High-order unmodeled dynamics Unknown disturbancesHigh performance specifications for nonlinear systemsActuator problems such as friction, deadzones, backlash
Controlinpute
e
d
d
yy y
y
u

plantr(t)
Feedback Linearization Adaptive ControllerA dynamic controller
du v y e
u
yy d
d
yy
ee
I
r e e
e
v
The equations give the FB controller structure
ˆ ˆ( ) ( ) ( )Tv vv f x K r W t x K r
vK
ˆ ( ) TW F x rˆ ( ) ( )TW t x
ˆ ( )f x

Robot System[I]
Robust ControlTerm
v(t)
PD Tracking Loop
rKv
Neural Network Robot Controller
Nonlinear Inner LoopFeedforward Loop
Universal Approximation Property
Problem- Nonlinear in the NN weights sothat standard proof techniques do not work
Feedback linearization
Easy to implement with a few more lines of codeLearning feature allows for on-line updates to NN memory as dynamics changeHandles unmodelled dynamics, disturbances, actuator problems such as frictionNN universal basis property means no regression matrix is neededNonlinear controller allows faster & more precise motion
yy
d
d
yy
ee
( )T TW V x
ˆ ( )f x
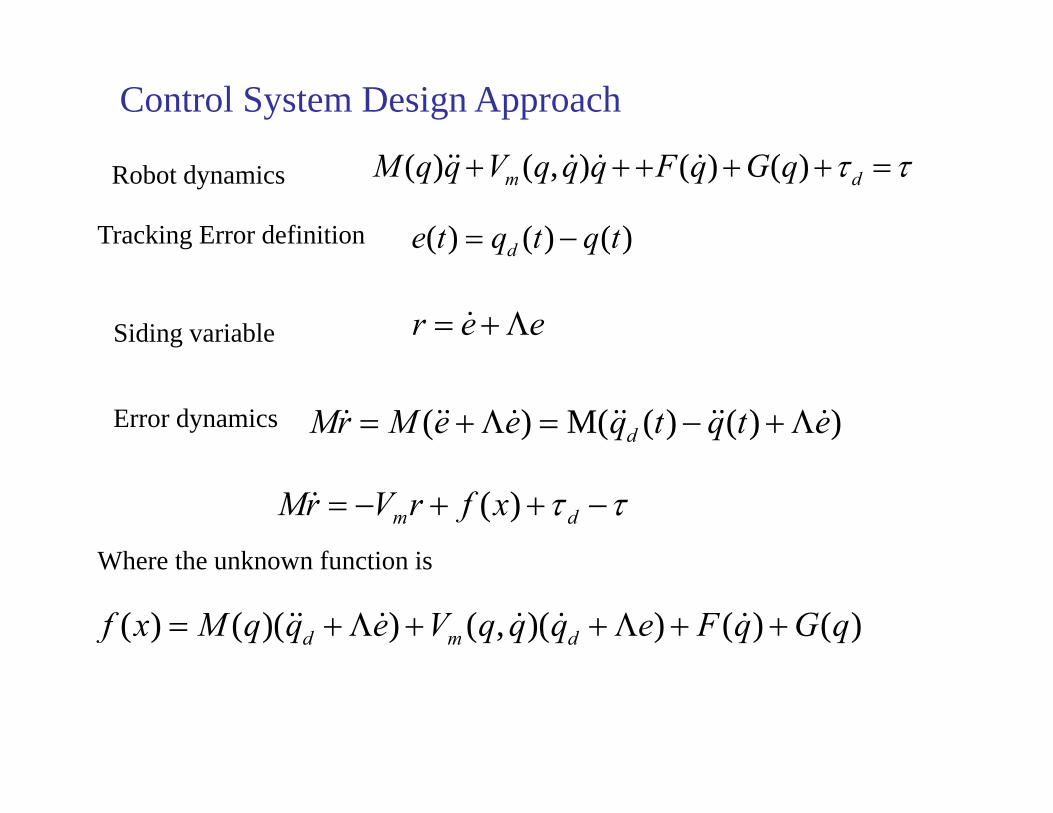
Control System Design Approach
( ) ( , ) ( ) ( )m dM q q V q q q F q G q
( ) ( ) ( )de t q t q t
r e e
dm xfrVrM )(
Robot dynamics
Tracking Error definition
Error dynamics
Siding variable
( ) M( ( ) ( ) )dMr M e e q t q t e
( ) ( )( ) ( , )( ) ( ) ( )d m df x M q q e V q q q e F q G q
Where the unknown function is

qdRobot System[I]
qe
PD Tracking Loop
r
dm qFqGqqqVqqM )()(),()( Robot dynamics
?controller
)()()( tqtqte d Tracking error
eer Sliding variable
The equations give the FB controller structure

Control System Design Approach
dm qFqGqqqVqqM )()(),()(
)()()( tqtqte d eer
dm xfrVrM )(
Robot dynamics
Tracking Error definition
Error dynamics
vrKxVW vTT )ˆ(ˆ Define control input
)()( xVWxf TTApprox. unknown function by NN
Universal Approximation Property UNKNOWN FN.
)()ˆ(ˆ)( tvxVWxVWrKrVrM dTTTT
vm
Closed-loop dynamics
)(~ tvfrKrVrM dvm

qdRobot System[I]
Robust ControlTerm
q
v(t)
e
PD Tracking Loop
rKv
Neural Network Robot Controller
^
qd
f(x)
Nonlinear Inner Loop
..
Feedforward Loop
Universal Approximation Property
Problem- Nonlinear in the NN weights sothat standard proof techniques do not work
Feedback linearization
Easy to implement with a few more lines of codeLearning feature allows for on-line updates to NN memory as dynamics changeHandles unmodelled dynamics, disturbances, actuator problems such as frictionNN universal basis property means no regression matrix is neededNonlinear controller allows faster & more precise motion

Theorem 1 (NN Weight Tuning for Stability)
Let the desired trajectory )(tqd and its derivatives be bounded. Let the initial tracking error bewithin a certain allowable set U . Let MZ be a known upper bound on the Frobenius norm of theunknown ideal weights Z . Take the control input as
vrKxVW vTT )ˆ(ˆ with rZZKtv MFZ )()( .
Let weight tuning be provided by
WrFxrVFrFW TTT ˆˆ'ˆˆˆ , VrGrWGxV TT ˆ)ˆ'ˆ(ˆ
with any constant matrices 0,0 TT GGFF , and scalar tuning parameter 0 . Initialize the weight estimates as randomVW ˆ,0ˆ .
Then the filtered tracking error )(tr and NN weight estimates VW ˆ,ˆ are uniformly ultimately bounded. Moreover, arbitrarily small tracking error may be achieved by selecting large controlgains vK . Backprop terms-
WerbosExtra robustifying terms-Narendra’s e-mod extended to NLIP systems
Adaptive part Robust part

Stability Proof based on Lyapunov Extension
Define a Lyapunov Energy Function
)~~()~~( 21
21
21 VVtrWWtrMrrL TTT
Differentiate
)()'ˆˆ~(~)ˆ'ˆˆ~(~
)2(21
vwrWxrVVtr
xrVrWWtr
rVMrrKrL
TTTT
TTTT
mT
vT
Using certain special tuning rules, one can show that the energy derivative is negative outside a compact set.
Lnegative
)(tr
)(~ tW This proves that all signals are bounded
Problems—1. How to characterize the NN weight errors as ‘small’?- use Frobenius Norm2. Nonlinearity in the parameters requires extra care in the proof
UUB- uniform ultimate boundednes

Parameter Convergence and Persistence of Excitation:
( ) TW F x r
( )Tvr W x K r
Error dynamics
( ) ( )Tvz t W x r K r
So thatIs bounded
Dynamics of param. est. error
( ) ( ) ( )T T Tvz t x W r K r .
( ) 0, ( ) 0r t r t Lyapunov showed that so input and output go to zero
So the state ( )W t goes to zero if the system is uniformly completely observable
1 2( ( )) ( ( ))t T
T
t
I x x d I
This is the same as a persistence of excitation condition on the regression vector
Therefore, if ( )x is PE, the parameters converge.
Adaptive Control

Theorem 1 (NN Weight Tuning for Stability)
Let the desired trajectory )(tqd and its derivatives be bounded. Let the initial tracking error bewithin a certain allowable set U . Let MZ be a known upper bound on the Frobenius norm of theunknown ideal weights Z . Take the control input as
vrKxVW vTT )ˆ(ˆ with rZZKtv MFZ )()( .
Let weight tuning be provided by
WrFxrVFrFW TTT ˆˆ'ˆˆˆ , VrGrWGxV TT ˆ)ˆ'ˆ(ˆ
with any constant matrices 0,0 TT GGFF , and scalar tuning parameter 0 . Initialize the weight estimates as randomVW ˆ,0ˆ .
Then the filtered tracking error )(tr and NN weight estimates VW ˆ,ˆ are uniformly ultimately bounded. Moreover, arbitrarily small tracking error may be achieved by selecting large controlgains vK .
Special case- Linear in the parameters – 1 layer NN (.)
(.)
(.)
(.)
x1
x2
y1
y2
VT WT
inputs
hidden layer
outputs
xn ym
1
2
3
L
(.)
(.)
(.)
Fixed basis set Tune 2nd
layer weights
STILL BETTER THAN ADAPTIVE CONTROL
This is a universal basis set good for a class of systemsNot a regression vector good for only one system
NO REGRESSION VECTOR NEEDED!

010
2030
4050
0
12
3
4
5
6
-20
-15
-10
-5
0
5
10
15
weights
W2 weights, x
d=[0.5sin(t) 0.5cos(t)]T
time
W2 w
eigh
ts
NN weights converge to the best learned values for the given system

τqB)+τq+G(q)+F(q)q(q,+Vq)qM( dm )(Structured Control NN
x
q,
2,, qq
q
q
1ˆ M
2ˆ mV
G
F
+)(ˆ xf
Partitioned neural network
Non
linea
r pre
proc
essi
ng
sin( ), cos( )i iq q
i jq q
2iq
coriolis
centripetal
sgn( )iqiqe

Robot System[I]
Robust ControlTerm
qqd
v(t)
qd
e
Tracking Loop
f(x)
rKv
Nonlinear Inner Loop
..
^
Feedforward Loop
Dynamic NN and Passivity
Static NN => Dynamic NN Feedback Controller
ˆ
ˆ
dWdt
dVdt

1s C
A
xx.Bu2
H(s)
u1
1s C
A
xx.Bu2
H(s)
u1
2)( BuCxVBWAxx TT
Closed-Loop System wrt Neural Networkis a Dynamic (Recursive NN)
,
TT rWGxV )ˆ'ˆ(ˆ
TTT xrVFrFW ˆ'ˆˆˆ The backprop tuning algorithms
make the closed-loop system passive
WrFxrVFrFW TTT ˆˆ'ˆˆˆ
VrGrWGxV TT ˆ)ˆ'ˆ(ˆ
The enhanced tuning algorithms
make the closed-loop system state-strict passive
SSP gives extra robustness properties to disturbances and HF dynamics

)())(())(()1( kukxgkxfkx
NN Control for Discrete Time Systems
dynamics
)(ˆ)(ˆ)(ˆ)(ˆ)(ˆ)(ˆ)1(ˆ kWkkIkykkWkW iTiii
Tiiiii
NN Tuning
layerlastforkrkyandNiforkrKkkWky NviT
ii ),1()(ˆ1,,1),()(ˆ)(ˆ)(ˆ
Error-based tuning
Gradient descent with momentum
Extra robust term
U.S. Patent- Jagannathan, Lewis

1s C
A
xx.Bu2
H(s)
u1
1s C
A
xx.Bu2
H(s)
u1
kkTT
kk uxVWAxx )(1
Chaos in Dynamic Neural Networks
c.f. Ron Chen
Recurrent or Dynamic NN

%MATLAB file for chaotic NN from Jun Wang's paper
function [ki,x,y,z]=tcnn(N);y(1)= rand; ki(1)=1; z(1)= 0.08;a=0.9; e= 1/250; Io=0.65;g= 0.0001; b=0.001;
for k=1: N-1;ki(k+1)= k+1;x(k)= 1/(1+exp(-y(k)/e));y(k+1)= a*y(k) + g -
z(k)*(x(k) - Io);z(k+1)= (1-b)*z(k);
endx(N)= 1/(1+exp(-y(N)/e));
Ie
zgyy
zz
kykkk
kk
/1
1
11
Jun Wang

Kung Tz 500 BCConfucius
ArcheryChariot driving
MusicRites and Rituals
PoetryMathematics
孔子Man’s relations to
FamilyFriendsSocietyNationEmperorAncestors
Tian xia da tongHarmony under heaven
124 BC - Han Imperial University in Chang-an

Handling High-Frequency Dynamics

Relevance- Machine Feedback Control
qd
qr1qr2
AzEl
barrel flexiblemodes qf
compliant coupling
moving tank platform
turret with backlashand compliant drive train
terrain andvehicle vibrationdisturbances d(t)
Barrel tipposition
qd
qr1qr2
AzEl
barrel flexiblemodes qf
compliant coupling
moving tank platform
turret with backlashand compliant drive train
terrain andvehicle vibrationdisturbances d(t)
Barrel tipposition
Vehicle mass m
ParallelDamper
mc
activedamping
uc(if used)
kc cc
vibratory modesqf(t)
forward speedy(t)
vertical motionz(t)
surface roughness(t)
k c
w(t)
Series Damper+
suspension+
wheel
Single-Wheel/Terrain System with Nonlinearities
High-Speed Precision Motion Control with unmodeled dynamics, vibration suppression, disturbance rejection, friction compensation, deadzone/backlash control
VehicleSuspension
IndustrialMachines
Satellite pointingLand Systems
Aerospace

Force Control
Flexible pointing systems
Vehicle active suspensionSBIR Contracts
What about practical Systems?

Rigid Arm
Flexible Modes
Rigid Arm
Motor Dynamics
controlinput
controlinput
q(t) q(t)
Flexible-Link Arm Flexible-Joint Arm
Fig. 5.2.4 Two canonical control problems with high-frequency modes.(a) Flexible-link robot arm. (b) Flexible-joint robot arm.
Two types of high frequency modes in Industrial Processes
Flexible actuator coupling

Flexible Systems with Vibratory Modes
f
rrr
f
r
fff
r
fffr
rfrr
f
r
fffr
rfrr
BBGF
Koqq
VVVV
MMMM
0000
Rigid dynamics
Flexible dynamics
Problem- only one control input !
Flexible link pointing system
acceleration velocityposition Flex. modes

Singular Perturbation Theory
rr r rr r r r rM q V q F G B
Slow subsystem
Fast Subsystem
0 00
f ff
f ff ff f f
q I qdq H K q BdT
f
rrr
f
r
fff
r
fffr
rfrr
f
r
fffr
rfrr
BBGF
Koqq
VVVV
MMMM
0000
tT
Time scaling
Tikhonov’s Theorem
2
( )
( )r r
f f f
f
q q O
q q q
Comes from Manifold Equation
TWO Control Inputs!!
NN design
Linear Design

[I]
Robust ControlTerm
v(t)
Tracking Loop
rKv
Nonlinear Inner Loop
f(x)^
Neural network controller for Flexible-Link robot arm
qr = qrqr.e
ee = .
qd =qdqd.
..qd
Robot Systemqfqf.
Fast PDgains
Br-1
Manifoldequation
F
Fast Vibration Suppression Loop
Singular PerturbationsAdd an extra feedback loopUse passivity to show stability

Coupled Systems
ee
Tdm
uqiRiLiKqGqFqqqVqqM
),()()(),()(
Motor electrical dynamics
Robot mechanical dynamics
Problem- only one control input !
Sprung mass (car body) smsz
Unsprung mass (tire) umuz
F
F
rzterrain
tK
VehicleActiveSuspensioncontrol
Flexible actuators

Backstepping Design
ee
Tdm
uqiRiLiKqGqFqqqVqqM
),()()(),()(
( ) ( , ) ( ) ( ) ( )m d T d T dM q q V q q q F q G q K i K i i
1. Outer Loop Design
Design desired current id using NN number 1
2. Inner Loop Design
Design inner NN control loop to make error smalldi i
( ) e eL F X u
Unknown Nonlinear term
Advantage of NN Backstepping-DO NOT need to compute the form of F(X) and find a linear parameterization

[I]
Robust ControlTerm vi(t)
Tracking Loop
rKr
Nonlinear FB Linearization Loop
F1(x)^ qr = qrqr.e
ee = .
qd =qdqd.
..qd
RobotSystem1/KB1 i
F2(x)^
K
id
NN#1
NN#2Backstepping Loop
ue[I]
Robust ControlTerm vi(t)
Tracking Loop
rKrKr
Nonlinear FB Linearization Loop
F1(x)F1(x)^
Neural network backstepping controller for Flexible-Joint robot arm
qr = qrqr.qr =qr = qrqr.qrqr.e
ee = .e = .
qd =qdqd.qd =qd =qdqd.qdqd.
..qd..qd
RobotSystem1/KB1 i
F2(x)F2(x)^
KK
id
NN#1
NN#2Backstepping Loop
ue
Backstepping
Advantages over traditional Backstepping- no regression functions needed
Add an extra feedback loopTwo NN neededUse passivity to show stability

Flexible turret/barrel system[Kp Kv]
qd e
PD Tracking Loop
u
Feedback LinearizationInner LoopNonlinear Adaptive
Network
backlashcomp.
nonlinearobserver
measured outputy(t)
Kf
Kd
Barrel flexibilitycompensation loop
Drive train compliancecompensation loop
qr
qfqd
Barrelpointingcommand
Structure of controller with adaptive backlash compensation and an additional loop for rejection of drive train compliance
Multi-Loop Control System
Modern Nonlinear Control Theory

Actuator Dynamics

=D(u)
ud+
-d-
m+
m-
.
ud+
d-
mu
BacklashDeadzone
System
Feedbackcontroller
Outputs
ActualControl inputsActuator
nonlinearity
AppliedControl inputs
Actuator Nonlinearities
Friction

Friction Compensation
dm qFqGqqqVqqM )()(),()(
Lagrangian System Dynamics – e.g. Robot
FrictionUse the standard NN from Lecture 1
qdRobot System[I]
Robust ControlTerm
q
v(t)
e
PD Tracking Loop
rKv
^
qd
f(x)
Nonlinear Inner Loop
.
.Feedforward Loop
Friction compensation

0 2 4 6 8 10 12 14 16-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Time(second)
(a)
0 2 4 6 8 10 12 14 16-0.04
-0.03
-0.02
-0.01
0
0.01
0.02
0.03
0.04
Time(second)
Leng
th(m
eter
)
(a)
0 2 4 6 8 10 12 14 16-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Time(second)
Leng
th(m
eter
)
(b)
NN Friction Compensator
Desired trajectory
Tracking errors- solid = fixed gain controller, dashed= NN controller
Trajectory Tracking Controller
Position Velocity
position
velocity
Fixed gain
NN

Deadzone
=D(u)
ud+
-d-
m+
m-
u
u
Sat(u)
d+-d-
u
=
-
Key fact

NN Approximation of Functions with Jumps
-3 -2 -1 0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
-3 -2 -1 0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
0(x) 1(x)
-3 -2 -1 0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
-3 -2 -1 0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
2(x) 3(x)
Jump Function Basis Set
1 1
x y
1
2
L
V1T
V2T
1cc
c
W1T
W2T
....
...
2
1
N
Augmented NN
Standard NN
Extra Nodes withJump Activation Functions

MechanicalSystem
Kv[
v
reqd
Estimateof NonlinearFunction
w
--
D(u)u
NN DeadzonePrecompensator
I
II
( )f x
q
dq
NN in Feedforward Loop- Deadzone Compensation
iiiTTTTT
iii WWrTkWrTkUuUWrwUTW ˆˆˆ)('ˆ)(ˆ21
WrSkrwUWUuUSW TTiii
TT ˆ)(ˆ)('ˆ1
Acts like a 2-layer NNWith enhanced backprop tuning !
little critic network

0 5 10 15-1
-0.5
0
0.5
1
x2(k)
time
0 5 10 15-1
-0.5
0
0.5
e2(k)
time
0 5 10 15-2
-1
0
1
2
x2(k)
time
0 5 10 15-1
-0.5
0
0.5
e2(k)
time
Performance Results
PD control-deadzone chops out the middle
NN control fixes the problem
ud+
d-
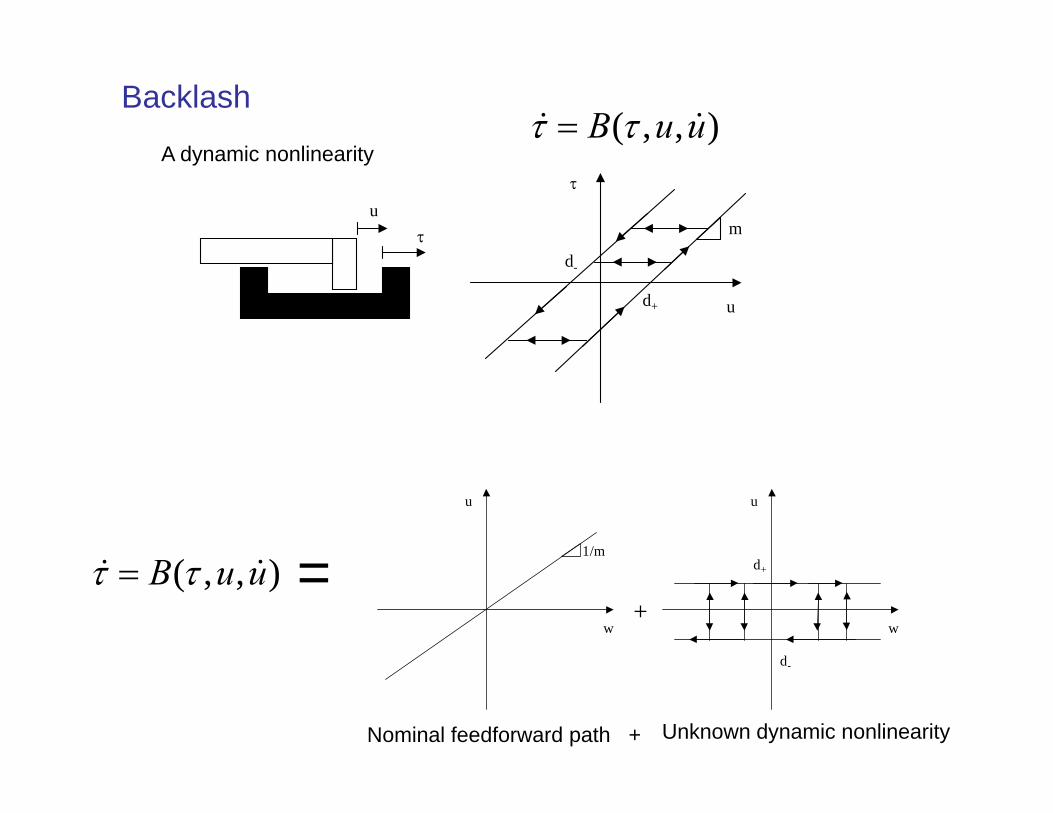
mu
Backlash
( , , )B u u
A dynamic nonlinearity
u
w
d+
d-
u
w
1/m
+=
Nominal feedforward path + Unknown dynamic nonlinearity
( , , )B u u

Nonlinear
SystemK
v[
v1
rexd
Estimate
of Nonlinear
Function
--
x
( )f x
des
[0
--
yd
(n)
-
Backlash
-
1/s
Filter v2
Backstepping loop
des
NN Compensator
-
dx r
Kb
u
nny
FZ
Dynamic Inversion NN compensator for system with Backlash
U.S. patent- Selmic, Lewis, Calise, McFarland

Performance Results
PD control-backlash chops off tops & bottoms
NN control fixes the problem
0 1 2 3 4 5 6 7 8 9 10-1.5
-1
-0.5
0
0.5
1
time
x 1(t)
PD controller with backlash
0 1 2 3 4 5 6 7 8 9 10-0.1
-0.05
0
0.05
0.1
0.15
time
e 1(t)
0 1 2 3 4 5 6 7 8 9 10-2
-1
0
1
2
time
x 2(t)
PD controller with backlash
0 1 2 3 4 5 6 7 8 9 10-1
-0.5
0
0.5
1
time
e 2(t)
position
velocity
error
0 1 2 3 4 5 6 7 8 9 10-1.5
-1
-0.5
0
0.5
1
time
x 1(t)
PD controller with NN backlash compensation
0 1 2 3 4 5 6 7 8 9 10-0.04
-0.03
-0.02
-0.01
0
0.01
timee 1(t)
position
Tracking error

~x 1
( , )h x xo 1 2
( , )h x xc 1 2
ROBOT
Kv
[vc
kD
KvkpM-1(.)
qxx
1
2
eee
qqqdd
d
x1
x2
z2
1x)(t)(ˆ tr
Neural Network Observer
Neural Network Controller
1~x
111
212
121
~)()()ˆ,ˆ(ˆˆ
~ˆˆ
xKxMxxWz
xxz
t
k
oTo
D
NN Observers Needed when all states are not measuredi.e. Output feedback
TooDo k 1
~)ˆ(ˆ xxFW
oooooo WFWxF ˆˆ~1
Tccc rxxFW ˆ)ˆ,ˆ(ˆ
21
ccc WrF ˆˆ
Tune NN observer -
Tune Action NN -
Recurrent NN Observer

Fuzzy-Neural Control

Neural Network Properties
Learning
Recall
Function approximation
Generalization
Classification
Association
Pattern recognition
Clustering
Robustness to single node failure
Repair and reconfiguration
Nervous system cell. http://www.sirinet.net/~jgjohnso/index.html
USED
???

Input Membership Fns. Output Membership Fns.
Fuzzy Logic Rule Base
NN
Input
NN
Output
Fuzzy Associative Memory (FAM) Neural Network (NN)
INTELLIGENT CONTROL TOOLS
Input x Output u
Input x Output u
Both FAM and NN define a function u= f(x) from inputs to outputs
FAM and NN can both be used for: 1. Classification and Decision-Making2. Control
(Includes Adaptive Control)
NN Includes Adaptive Control (Adaptive control is a 1-layer NN)

x 2
x1
FL Membership Functions for 2-D Input Vector x
1
0
1 0
X1i X1
i+1
X2j
X2j+
1x1
i x1i+1
x 2j
x 2j+
1
Relation Between Fuzzy Systems and Neural Networks

Separable Gaussian activation functions for RBF NN
Separable triangular activation functions for CMAC NN

Two-layer NN as FL System
(.)
(.)
(.)
(.)
x1
x2
y1
y2
VT WT
inputs
hidden layer
outputs
xn ym
1
2
3
L
(.)
(.)
(.)
Standard thresholds
n
FL system = NN with VECTOR thresholds

.e)b,a,z(2l
ii2l
i
li
)bz(ali
liiA
rWKkr)bBaAˆ(KW WWT
W
raKkrWAKa aaT
a
rbKkrWBKb bbT
b
Gaussian membership function
Tuning laws
ControlledPlantKv[ I]
r(t)
-
Input MembershipFunctions
Fuzzy Rule Base
Output MembershipFunctions
xd(t)
e(t)
-
-)x,x(g d
x(t)
Fuzzy Logic Controllers


Dynamic Focusing of Awareness
Initial MFs
Final MFs
Depend on desired reference trajectory

Effect of change of membership function spread "a"
Effect of change of membership function elasticities "c"
2cB )b,a,z()c,b,a,z(
2
22
2
1
c
)bz(a))bz(a(cos)c,b,a,z(
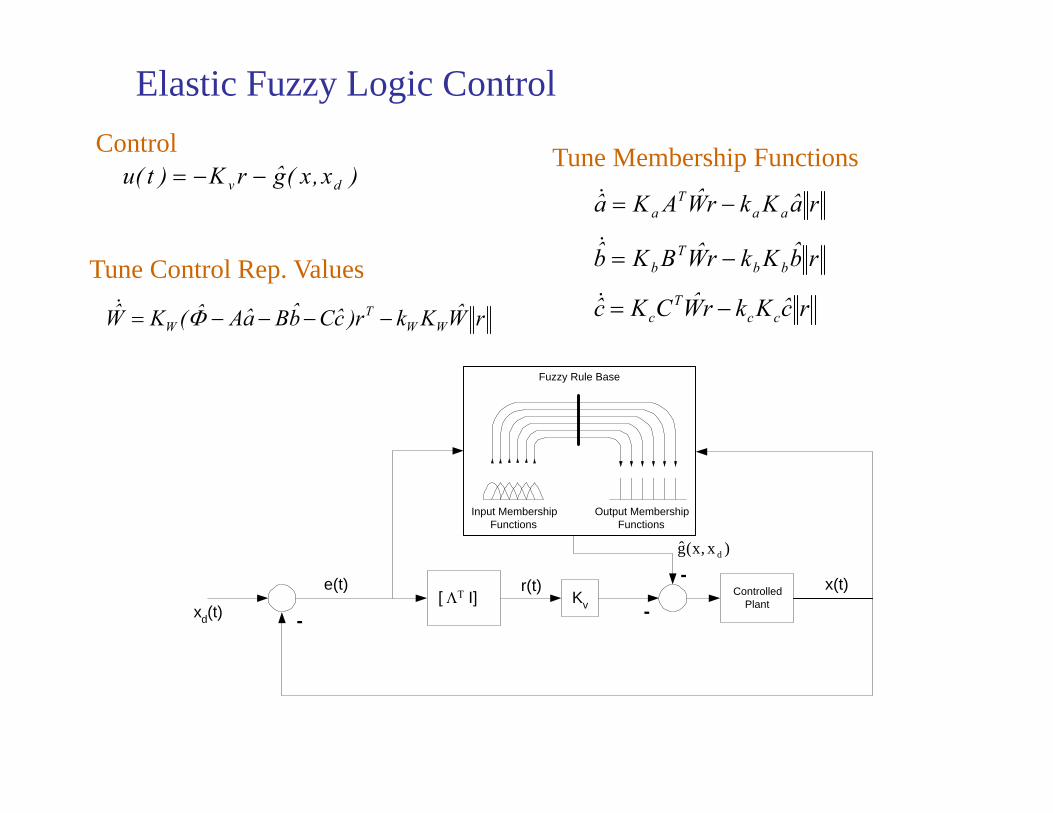
Elastic Fuzzy Logic- c.f. P. WerbosWeights importance of factors in the rules
ControlledPlantKv[ I]
r(t)
-
Input MembershipFunctions
Fuzzy Rule Base
Output MembershipFunctions
xd(t)
e(t)
-
-)x,x(g d
x(t)
)x,x(grK)t(u dv raKkrWAKa aa
Ta
rbKkrWBKb bbT
b
rWKkr)cCbBaAˆ(KW WWT
W rcKkrWCKc ccT
c
Elastic Fuzzy Logic ControlControl Tune Membership Functions
Tune Control Rep. Values

Better Performance
Initial MFs
Final MFs

UnknownPlant
PerformanceEvaluator
InstantaneousUtility
r(t)
DesiredTrajectory
Action Generating NN
x(t)u(t)
tuning
d(t)
R(t)
)(ˆ xfUnknown
Plant
PerformanceEvaluator
InstantaneousUtility
r(t)
DesiredTrajectory
Action Generating NN
x(t)u(t)
FL Critic
tuning
d(t)
R(t)
)(ˆ xf
Fuzzy Logic Critic NN controller

UnknownPlant
PerformanceEvaluator
d(t)
)(^ xg u(t) x(t)
.
R
r
+
v(t)
Action Generating NN
xd(t)Kv
Kv
( 6-15 )
( 6-14 )
+
+
11ˆ;ˆ VW
-(.)
(.)
(.)
(.)
x1
x2
y1
y2
VT WT
inputs
hidden layer
outputs
xn ym
1
2
3
L
REFERENCE
input membershipfunctions
fuzzy rulle base
output membershipfunctions
+
R
Learning FL Critic Controller
,ˆ)ˆ('ˆˆ1111 VrVWrHV TTT
,ˆ)ˆ(ˆ1111 WRrVW TT
2211122222ˆˆ)ˆ('ˆ)()(ˆ WVrVWRrW TTTTT
Tune Action generating NN (controller)
Tune Fuzzy Logic Critic
FL Critic
Action generating NN
Critic requires MEMORY

User input:Reference Signal Performance
MeasurementMechanism
Reinforcement Signal
r(t)
Action Generating Neural Net
PLANT
RobustTerm
Kv
q(t)u(t)
qd(t)
v(t)
g(x)-
-+
Utility
Critic Element
R(t)
d(t)fr(t)
Control Action
( )×
( )×
( )×
( )×
y1
ym-1
ym
Input Layer Hidden
Layer
Output Layer
z2
zN-1
zN
Inpu
t Pre
-pro
cess
ing W
x1
xn-1
xn
1z1=1q
d(t)
Reinforcement Learning NN Controller

High-Level NN Controllers Need Exotic Lyapunov Fns.
1))(sgn()( trtR
)~~(21)( 1
1WFWtrrtL T
n
ii
WFRxFW T )(ˆ
)~~(21)1ln()1ln()( 1)()( WFWtreetL Ttrtr
( ) ( ~ ~ )L trT T sgn +r r W F W1
)~~()(11
1)()(
WFW
T
trtrtrtr
eeL
Reinforcement NN control
Simplified critic signal
Lyapunov Fn
Lyap. Deriv. contains R(t) !!
Tuning Law only contains R(t)
Adaptive Reinforcement Learning
,)(ˆ11 TWR
Critic is output of NN #1
)(ˆ),(ˆ 22 Td Wxxg
Action is output of second NN
,ˆ)(ˆ111 WRW T
,ˆˆ)(')(ˆ211122 WRWVrW
TT
The tuning algorithm treats this as a SINGLE 2-layer NN
Energy-based control





















