18
BT 075A I/VK-35 Data: 01/02 Página 1/18 Treinamento Técnico de Pós-Vendas

BT075A
I/VK-35 Data: 01/02Página 1/18
Treinamento Técnico de Pós-Vendas

BT075A
I/VK-35 Data: 01/02Página 2/18
Treinamento Técnico de Pós-Vendas
CAN-Bus (Controller Area Network)

BT075A
I/VK-35 Data: 01/02Página 3/18
Treinamento Técnico de Pós-Vendas
Primeira possibilidade:
Cada informação é trocada através de um condutor próprio.
A transmissão de dados
Unidade de comando para câmbio automático J217
Unidade de comando para Motronic J220
Rotação do motor
Consumo de combustível
Posição da borboleta
Intervenção no controle do motor
Engate para cima-p/baixo

BT075A
I/VK-35 Data: 01/02Página 4/18
Treinamento Técnico de Pós-Vendas
Unidade de comando para Motronic J220
Rotação do motor
Consumo de combustível
Disposição da borboleta
Intervenção no controle do motor
Engate para cima-p/baixo
Segunda possibilidade:
Todas as informações são trocadas através de no máximo dois condutores, o CAN-Databus, entre as unidades de comando.
A transmissão de dados
Unidade de comando para câmbio automático J217

BT075A
I/VK-35 Data: 01/02Página 5/18
Treinamento Técnico de Pós-Vendas
O CAN-Bus de dados
é um modo de transmissão de dados entre unidades de comando. Ele conecta as unidades de comando individuais a um sistema global. Quanto mais informações uma unidade de comando tem sobre as condições do sistema global, tanto melhor ele pode ajustar as diferentes funções que o integram.
Três sistemas Bus de dados
A) Sistema de transferência de grupos (BUS) de dados composto por três subsistemas
B) Limitação do volume de dados a ser transmitidos no sistema, devido às características específicas (velocidade) de cada subsistema
C) Limitação dos efeitos no sistema em caso de interrupção de um dos subsistemas

BT075A
I/VK-35 Data: 01/02Página 6/18
Treinamento Técnico de Pós-Vendas
Vantagens dos Data-Buses
· Havendo necessidade de ampliar o protocolo de dados com informações suplementares, são necessárias apenas modificações no software.
· Uma reduzida cota de falhas por constante checagem das informações transmitidas pelos dispositivos de comando e por proteção adicional nos protocolos de dados.
· Menos cabeamento de sensores e sinais pela múltipla utilização de um sinal de sensor.
· É possível uma transmissão muito rápida de dados entre as unidades de comando.
· Ganho de espaço por unidades de comando menores e conectores menores dos mesmos.
· O CAN-Databus é normalizado mundialmente.
Por isso, unidades de comando de diferentes fabricantes também podem efetuar a troca de dados.
Unid. de comando 1 Unid. de comando 2
Unid. de comando 3Unid. de comando 4
Conexão CAN-Bus

BT075A
I/VK-35 Data: 01/02Página 7/18
Treinamento Técnico de Pós-Vendas
Finalização Transf. Dados
Finalização Transf. Dados
Cabeamento Transf. Dados
Unidade de comando para câmbio automático J217 com Controlador-CAN e Transceptor-CAN
Unidade de comando para Motronic J220 com Controlador CAN e Transceptor-CAN
O CAN-Databus é composto de um Controlador
um Transceptor
duas finalizações Transf. de dados
dois cabos CAN-Bus.

BT075A
I/VK-35 Data: 01/02Página 8/18
Treinamento Técnico de Pós-Vendas
Finalização Transf. Dados
Finalização Transf. DadosCabeamento Transf. Dados
Unid.de comando p/ câmbio automático J217 com Controlador- CAN e Transceptor- CAN
Unidade de comando para Motronic J220 com Controlador- CAN e Transceptor- CAN
O Controlador CAN
recebe os dados que devem ser transmitidos de microcontroladores na unidade de comando. Ele processa os dados e os transfere para o Transceptor CAN.
Ele recebe igualmente os dados do Transceptor CAN, processa-os do mesmo modo e os transfere para os microcontroladores na unidade de comando.
O Transceptor CAN
é um Emissor (Transmissor) e Receptor (Receptor). Ele converte os dados do Controlador CAN em sinais elétricos e os transmite pelos cabos Databus
Igualmente ele recebe os dados e os converte para o Controlador CAN.
Os cabos de Transferência de Dados
são bidirecionais e servem para a transmissão dos dados.
São identificados por CAN-High e CAN-Low
A finalização Transferência de Dados
é um resistor. Ele impede que os dados transmitidos retornem como eco das extremidades e adulterem os dados.
BT075A
I/VK-35 Data: 01/02Página 9/18
Treinamento Técnico de Pós-Vendas
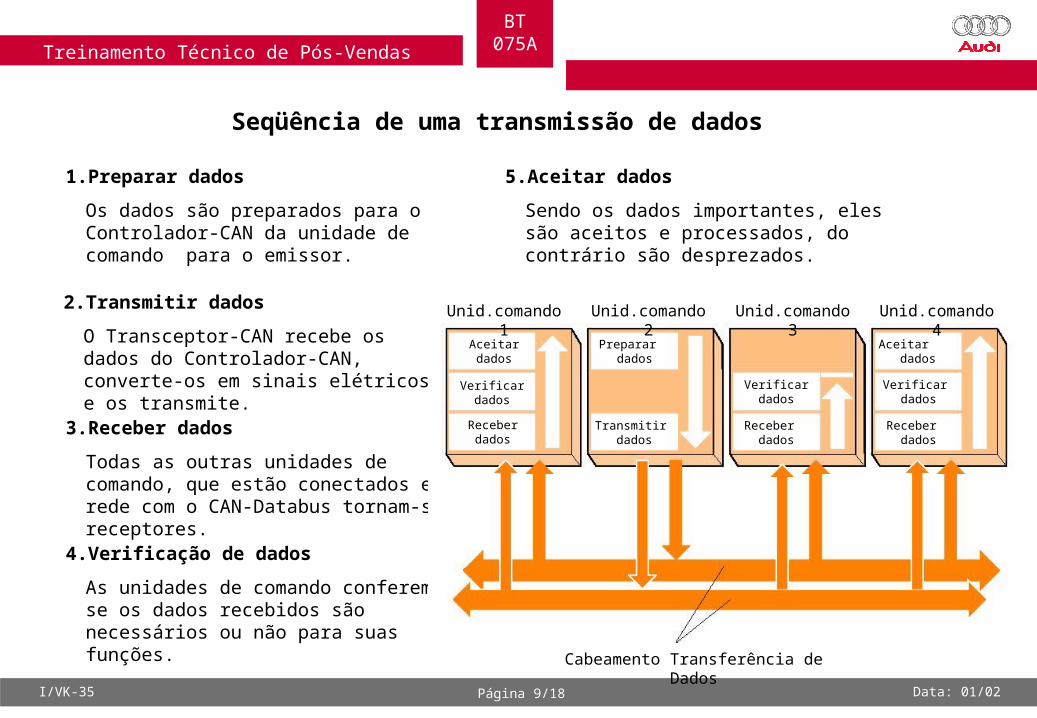
Seqüência de uma transmissão de dados
1. Preparar dados
Os dados são preparados para o Controlador-CAN da unidade de comando para o emissor.
4. Verificação de dados
As unidades de comando conferem se os dados recebidos são necessários ou não para suas funções.
5. Aceitar dados
Sendo os dados importantes, eles são aceitos e processados, do contrário são desprezados.
2. Transmitir dados
O Transceptor-CAN recebe os dados do Controlador-CAN, converte-os em sinais elétricos e os transmite.
3. Receber dados
Todas as outras unidades de comando, que estão conectados em rede com o CAN-Databus tornam-se receptores.
Cabeamento Transferência de Dados
Unid.comando 1 Unid.comando 2 Unid.comando 3 Unid.comando 4
Aceitar dados
Aceitar dados
Preparar dados
Verificardados
Receber dados
Verificar dados
Verificardados
Receber dados
Receber dados
Transmitir dados

BT075A
I/VK-35 Data: 01/02Página 10/18
Treinamento Técnico de Pós-Vendas
campo Origem (1 Bit)
campo Status (11 Bit)1 Bit = sem uso
campo Dados (máx. 64 Bit)campo Confirmação (2 Bit)
campo Fim (7 Bit)campo Segurança (16 Bit)campo Controle (6 Bit)
O campo Origem (Start of Frame) marca o início do protocolo de dados
No campo Status (Arbitration Field) é determinada a prioridade do protocolo de dados
No campo Controle (Control Field) consta a quantidade de informações que se encontra no campo Dados
O campo Dados (Data Field) transfere as informações
O campo Segurança (CRC Field) serve para o reconhecimento de falhas na transmissão
No campo Confirmação (ACK Field) os receptores confirmam o correto recebimento dos dados
Com o campo Fim (End of Frame) o protocolo de dados é encerrado
O protocolo de dados

BT075A
I/VK-35 Data: 01/02Página 11/18
Treinamento Técnico de Pós-Vendas
Formação de um protocolo de dados
Cada Bit sempre pode ter apenas uma condição ou valor „0“ ou „1“.
Condição com valor „1“
Interruptor fechado
Lâmpada acende
Condição com valor „0“
Interruptor aberto
Lâmpada não acende
Condição com valor „1“
lógico „high“
Condição com valor „0“
lógico „low“

BT075A
I/VK-35 Data: 01/02Página 12/18
Treinamento Técnico de Pós-Vendas
Transmissão de informações por BitsExplicação:
Se o 1. Bit for enviado com 0 Volt e o 2. igualmente com 0 Volt, assim a informação na tabela diz „Levantador do vidro encontra-se em movimento“ ou „Temperatura do líquido de arrefecimento importa em 10°C“.
Variante possível 2. Bit 1. Bit GráficoInformação dacondição do
levantador-vidro
Informação datemperatura dolíquid. arrefec.
Um 0 Volt 0 Volt em movimento 10°C
Dois 0 Volt 5 Volt em repouso 20°C
Três 5 Volt 0 Volt na área decaptação
30°C
Quatro 5 Volt 5 Volt em reconhec. debloqueio em cima
40°C

BT075A
I/VK-35 Data: 01/02Página 13/18
Treinamento Técnico de Pós-Vendas
Transmissão de informações por Bits
A tabela abaixo mostra como o número de informações aumenta com cada Bit adicional.
Quanto mais Bits são alinhados, tanto mais informações podem ser transmitidas.Com cada Bit adicional duplica-se o número das informações possíveis.
Variantes-Bitcom 1 Bit
Informaçãopossível
Variantes-Bitcom 2 Bits
Informaçãopossível
Variantes-Bitcom 3 Bits
Informaçãopossível
0 Volt 10°C 0 Volt, 0 Volt 10°C 0 Volt, 0 Volt, 0 Volt 10°C
5 Volt 20°C 0 Volt, 5 Volt 20°C 0 Volt, 0 Volt, 5 Volt 20°C
5 Volt, 0 Volt 30°C 0 Volt, 5 Volt, 0 Volt 30°C
5 Volt, 5 Volt 40°C 0 Volt, 5 Volt, 5 Volt 40°C
5 Volt, 0 Volt, 0 Volt 50°C
5 Volt, 0 Volt, 5 Volt 60°C
5 Volt, 5 Volt, 0 Volt 70°C
5 Volt, 5 Volt, 5 Volt 80°C

BT075A
I/VK-35 Data: 01/02Página 14/18
Treinamento Técnico de Pós-Vendas
Lógica negativa
Na especificação do CAN-Bus foi determinada a lógica negativa
Sinal dominante
Interruptor fechado
Lâmpada não acende
Sinal recessivo
Interruptor aberto
Lâmpada acende
Condição com valor
Transceptor fechado
Tensão sobre cabos de dados
aprox. 2 V resp. 3 V no Bus-Conforto
aprox. 1,5 resp. 3,5 V no Bus-Acionamento
Condição com valor
Transceptor aberto
Tensão sobre cabos de dados
aprox. 0 V resp. 5 V no Bus-Conforto
aprox. 2,5 V no Bus-Acionamento

BT075A
I/VK-35 Data: 01/02Página 15/18
Treinamento Técnico de Pós-Vendas
Dominância-0
No Sistema CAN-Databus sempre estão conectados vários dispositivos de controle.
Somente quando todos os dispositivos de comando transmitirem um „1“-Bit a informação no Bus lógico é „1“.
Se pelo menos um dispositivo de comando transmitir um Bit-„0“, então o sinal no condutor Bus lógico é „0“.
A informação „0“ de um dispositivo de comando sobrescreve a informação „1“ dos outros dispositivos de comando.
O Bit-„0“ é dominante
O Bit-„1“ é recessivo

BT075A
I/VK-35 Data: 01/02Página 16/18
Treinamento Técnico de Pós-Vendas
A alocação CAN-Transferência de Dados
Se várias unidades de comando quiserem transmitir ao mesmo tempo seu protocolo de dados, deve ser determinado quem está em primeiro lugar na fila. O protocolo de dados com a maior prioridade é transmitido primeiro.
Todas as três unidades de controle iniciam simultaneamente a transmissão de seus protocolos de dados.
Simultaneamente eles comparam Bit por Bit sobre a conexão Databus.
Se uma unidade de comando envia um Bit de valor menor e reconhece um Bit de valor maior, ele pára de transmitir e transforma-se num receptor.
Prioridade Protocolo de dados Campo Status
1 Mensagem -Freio 001 1010 0000
2 Mensagem -Motor 010 1000 0000
3 Mensagem-Câmbio 100 0100 0000
Mensagem da unidade de comando ABS/EDS
Mensagem da unidade de comando para Motronic
Mensagem da unidade de comando para câmbio
automático
Cabeamento Transf. Dados
Menor valor
Maior valor
Unidade de comando para Motronic perde
Unidade de comando para câmbio automático perde

BT075A
I/VK-35 Data: 01/02Página 17/18
Treinamento Técnico de Pós-Vendas
Fontes de interferência no veículo são os componentes que geram ondas eletromagnéticas no seu funcionamento.
Fontes de interferências
Para evitar a influência de interferências nos cabos de dados, dois cabos Databus são torcidos um com o outro.
Nos dois cabos a mudança da tensão tem a mesma grandeza, contudo contrária.
Conseqüentemente a soma das tensões, que irradia para fora, é sempre constante nos dois cabos .
A diferença das duas tensões (= conteúdo lógico) é independente das tensões que irradiam de fora para dentro, sempre igual em grandeza.
Nível inferior
Nível superior

BT075A
I/VK-35 Data: 01/02Página 18/18
Treinamento Técnico de Pós-Vendas
Separar os cabos torcidos no local danificado e efetuar o conserto com o cabo de reparo da Maleta-VAS 1978.Durante a execução do reparo, deve-se observar que as voltas da torção sejam soltas o mínimo possível e que as extremidades dos cabos sejam posicionadas afastadas uma da outra (mín.100mm), para evitar possíveis interferências.
Conceito de reparo do cabo CAN
Soltar torção no máx. 50mm

















