Geographic Effects on Vehicle Reliability: Developing Proportional Hazards Models for a Deployable Military
Vehicle
by
Clayton Alexander Van Volkenburg
A thesis submitted in conformity with the requirements for the degree of Master of Applied Science
Department of Mechanical and Industrial Engineering University of Toronto
© Copyright by Clayton Alexander Van Volkenburg 2014
ii
Geographic Effects on Vehicle Reliability: Developing
Proportional Hazards Models for a Deployable Military Vehicle
Clayton Alexander Van Volkenburg
Master of Applied Science
Department of Mechanical and Industrial Engineering
University of Toronto
2014
Abstract
Unlike many industries that have their equipment in one location with consistent usage patterns,
armies move their vehicles between different geographic locations with varying environmental,
and usage conditions. This creates interesting conditions for study, as those geographic changes
can be studied to detect their effect on system reliability.
Unfortunately, this is not being fully exploited, due in part to the poor capture and storage of
information, a problem faced by many operators of maintenance databases.
This thesis develops a method to characterize failure data contained in a maintenance database
using a standardized naming system, and applies a proportional hazards model for each
geographic location using covariates to represent the conditions.
In addition to understanding how a system has performed, the proportional hazards model will
allow geographic location factors to be used in predicting system reliability and spares parts
requirements in a new location.
iii
Acknowledgments
I would like to thank the members of the Centre for Maintenance Optimization and Reliability
Engineering (C-MORE) at the University of Toronto, especially the guidance and assistance of
the core staff: Professor Andrew Jardine, for allowing me to join the lab and pursue this work;
Dr. Dragan Banjevic, for always seeking a little bit more; Neil Montgomery, for his direction
and assistance optimizing EXAKT and his understanding of how the system works in the
background; and Dr. Elizabeth Thompson, for her administrative support and coffee.
I am also grateful for the assistance and support of many members of the TLAV project, and
DGLEPM; they provided a sounding board and gave clear answers to a number of problems I
encountered while cleaning the data used in this thesis. I especially would like to thank Mike
Rondeau and Frank Jutras; their intimate knowledge of the system, along with their willingness
to help, was appreciated.
Finally, I would like to thank my wife Jen, daughters Sophie, Lilian and Leia, and son Colin for
their support and more importantly their smiles.
iv
Table of Contents
Acknowledgments ......................................................................................................................... iii
Table of Contents ............................................................................................................................ iv
List of Tables .................................................................................................................................. ix
List of Plates ..................................................................................................................................xii
List of Figures .............................................................................................................................. xiii
List of Appendices ........................................................................................................................ xiv
List of Acronyms and Abbreviations ............................................................................................. xv
Chapter 1 Introduction ..................................................................................................................... 1
1.1 Overview.............................................................................................................................. 1
1.2 Army .................................................................................................................................... 1
1.3 Data Management Systems ................................................................................................. 1
1.3.1 DRMIS Data ............................................................................................................ 2
1.4 Vehicle System .................................................................................................................... 3
1.4.1 M113 History ........................................................................................................... 3
1.5 Research Motivation ............................................................................................................ 6
1.5.1 Main Research Objective ......................................................................................... 6
1.5.2 Secondary Research Objective ................................................................................ 7
1.6 Thesis Structure ................................................................................................................... 7
Chapter 2 Maintenance Processes ................................................................................................... 8
2.1 Canadian Army Maintenance .............................................................................................. 8
2.2 Spectrometric Oil Analysis Program (SOAP) ................................................................... 11
2.3 Generalized Maintenance Process ..................................................................................... 12
2.4 Data Capture ...................................................................................................................... 14
2.5 Preventive Maintenance..................................................................................................... 14
2.5.1 Definition ............................................................................................................... 14
v
2.5.2 Preventive Maintenance Themes ........................................................................... 16
2.5.3 Industry Differences .............................................................................................. 16
2.5.4 Lowest Operating Cost and Least Possible Downtime.......................................... 16
2.5.5 Refined Preventive Maintenance Statement .......................................................... 17
2.5.6 TLAV Preventive Maintenance Policy Review .................................................... 18
Chapter 3 Data Synthesis ............................................................................................................... 19
3.1 The Information Pyramid .................................................................................................. 19
3.2 Sources of Data .................................................................................................................. 20
3.3 The TLAV CMMS/ERP Dilemma .................................................................................... 21
3.3.1 Lack of Failure Mode or Failure Cause ................................................................. 22
3.3.2 Lack of Clear Dates ............................................................................................... 24
3.3.3 Freeform Text ........................................................................................................ 24
3.3.4 Incomplete Component Identification ................................................................... 25
3.3.5 Poor recording of usage data ................................................................................. 25
3.4 Remedies............................................................................................................................ 26
3.4.1 Component Identification ...................................................................................... 26
3.4.2 Work Order Coding ............................................................................................... 26
3.4.3 Vehicle Usage Calculation .................................................................................... 33
3.5 DIKW Conclusions ............................................................................................................ 34
Chapter 4 Operating Condition Effects ......................................................................................... 35
4.1 Vehicle Usage .................................................................................................................... 35
4.2 Environmental Conditions ................................................................................................. 36
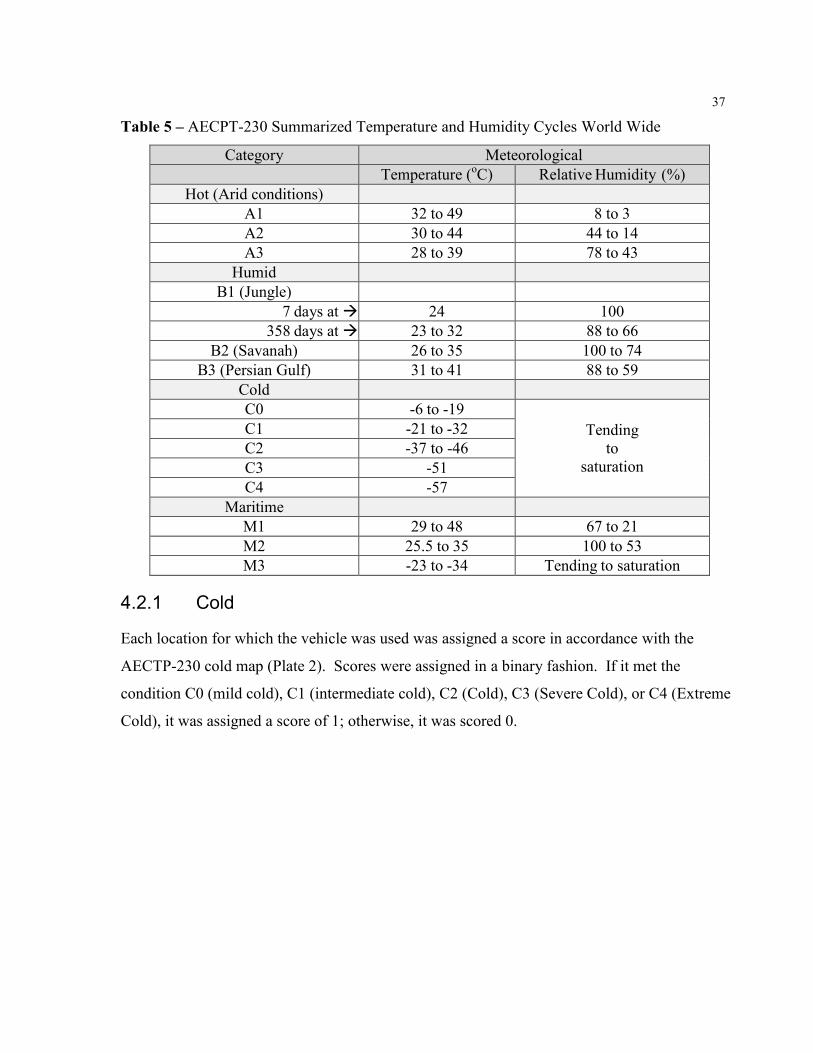
4.2.1 Cold........................................................................................................................ 37
4.2.2 Hot ......................................................................................................................... 38
4.2.3 Hot–Humid ............................................................................................................ 40
4.3 Geographic Conditions ...................................................................................................... 40
vi
4.4 Operating Conditions ......................................................................................................... 41
4.4.1 Operator Experience .............................................................................................. 41
4.4.2 Idling Time ............................................................................................................ 41
4.4.3 Add-on-Armour ..................................................................................................... 41
4.5 Additional Future Conditions ............................................................................................ 41
4.5.1 Wet or Dusty .......................................................................................................... 41
4.5.2 Extreme Cold ......................................................................................................... 42
4.5.3 Stagnation .............................................................................................................. 42
4.5.4 Rocks/Unprepared Surfaces................................................................................... 42
4.5.5 Storage ................................................................................................................... 42
4.5.6 Mountainous Terrain ............................................................................................. 42
4.5.7 Maritime Environment........................................................................................... 43
4.5.8 General Condition Covariate Summary................................................................. 43
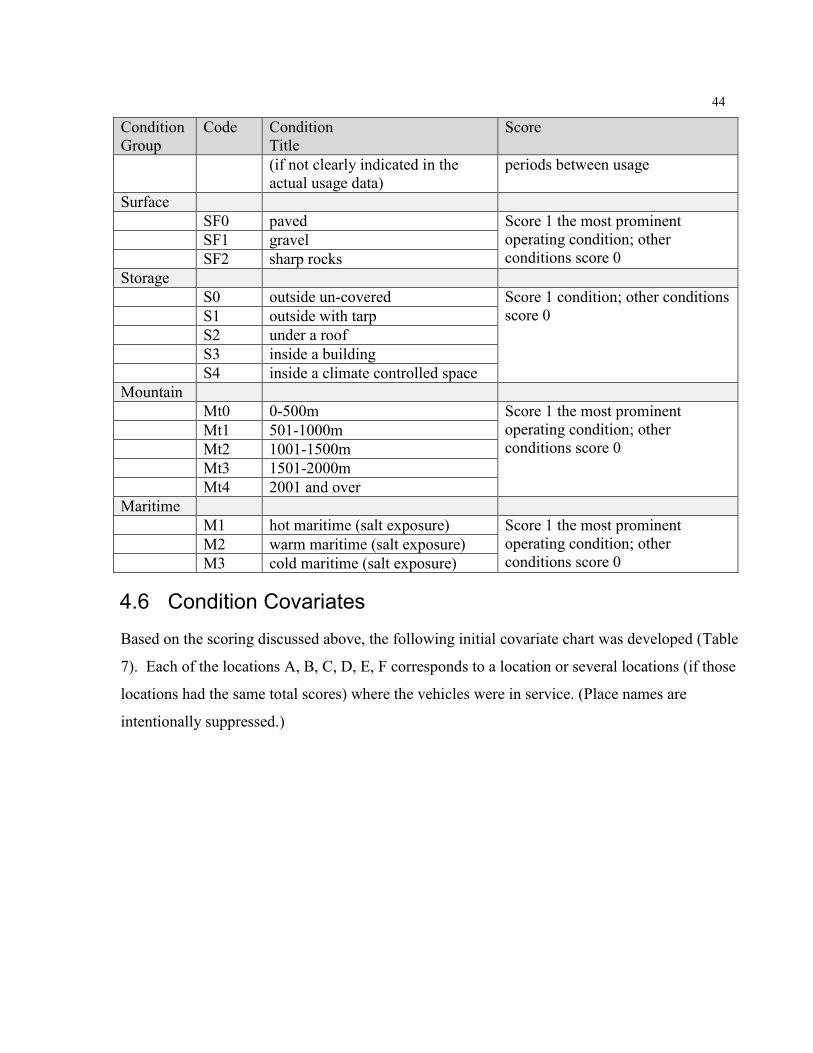
4.6 Condition Covariates ......................................................................................................... 44
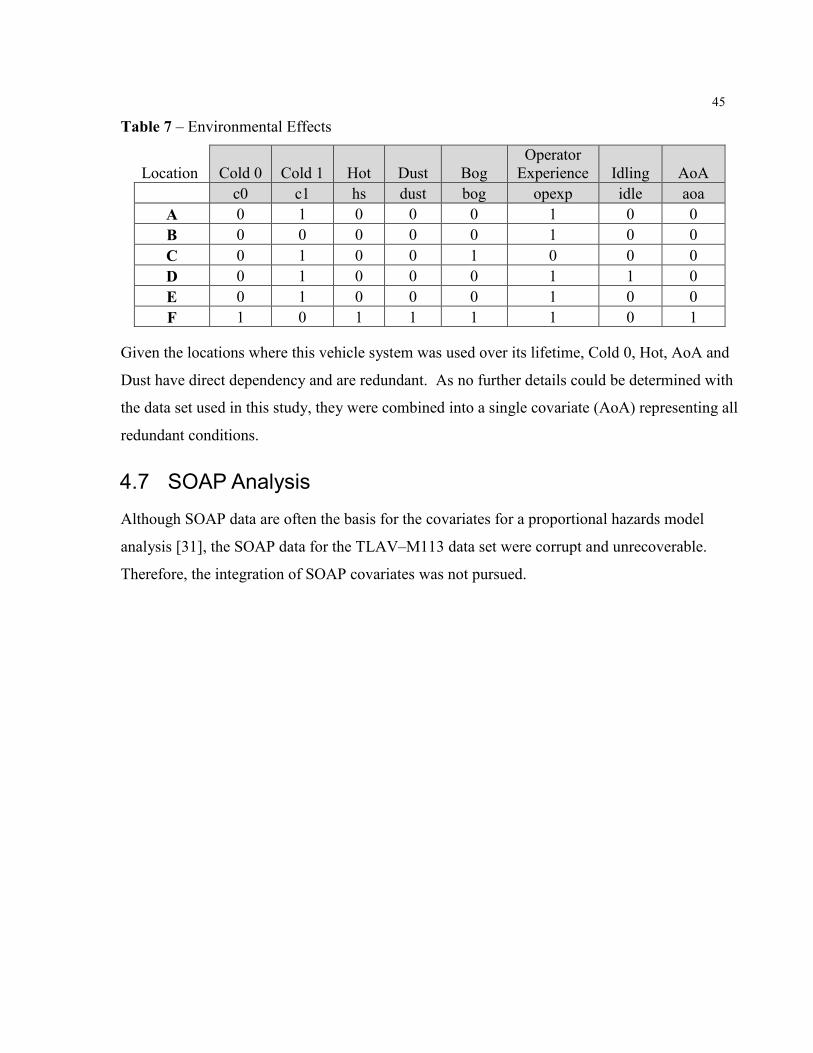
4.7 SOAP Analysis .................................................................................................................. 45
Chapter 5 Proportional Hazards Model Development................................................................... 46
5.1 EXAKT .............................................................................................................................. 46
5.2 Data Input .......................................................................................................................... 46
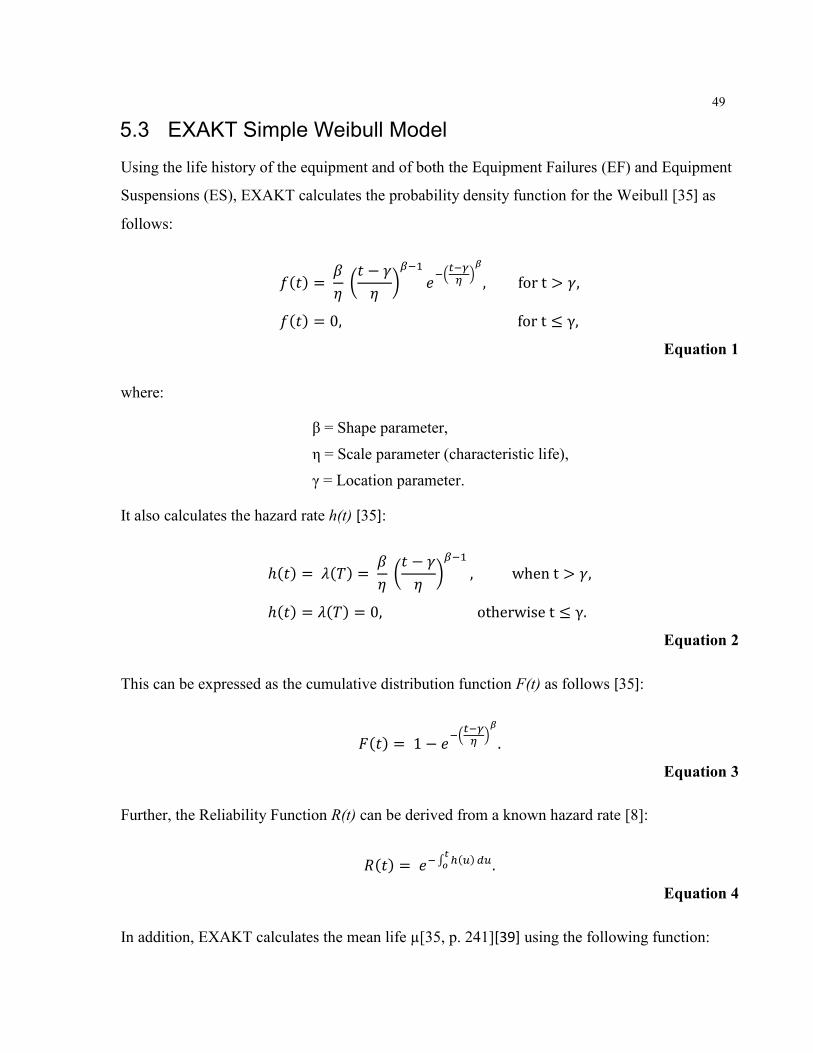
5.3 EXAKT Simple Weibull Model ........................................................................................ 49
5.3.1 EXAKT Proportional Hazards Model ................................................................... 51
5.4 Data Processing: Moving Up the DIKW Pyramid ............................................................ 53
5.4.1 Data to Information................................................................................................ 53
5.4.2 Transmissions ........................................................................................................ 53
5.4.3 Engines .................................................................................................................. 65
5.4.4 Suspension Systems ............................................................................................... 70
5.5 Summary Table .................................................................................................................. 71
vii
5.6 Information to Knowledge ................................................................................................. 72
5.7 Data to Wisdom ................................................................................................................. 73
5.7.1 General Formulation .............................................................................................. 73
5.7.2 Software Integration .............................................................................................. 75
Chapter 6 Conclusion .................................................................................................................... 77
6.1 Results ............................................................................................................................... 77
6.2 Data .................................................................................................................................... 77
6.3 Reaching the Peak of DIKW ............................................................................................. 77
6.4 Additional Data Manipulation ........................................................................................... 78
Chapter 7 Future Work .................................................................................................................. 79
7.1 ERP Data Characterization ................................................................................................ 79
7.2 Covariate Development ..................................................................................................... 79
7.3 Covariate Integration ......................................................................................................... 79
References...................................................................................................................................... 80
Appendix A – ERP File Labels .................................................................................................. 84
Appendix B – CMMS File Labels ............................................................................................. 85
Appendix C – Preventive Maintenance Analysis....................................................................... 86
C.1 Data .................................................................................................................................... 86
C.2 Existing Inspection Regime ............................................................................................... 86
C.3 Data Compilation ............................................................................................................... 86
C.4 Pareto Analysis .................................................................................................................. 87
C.5 Pareto Comparison to Inspection Items ............................................................................. 88
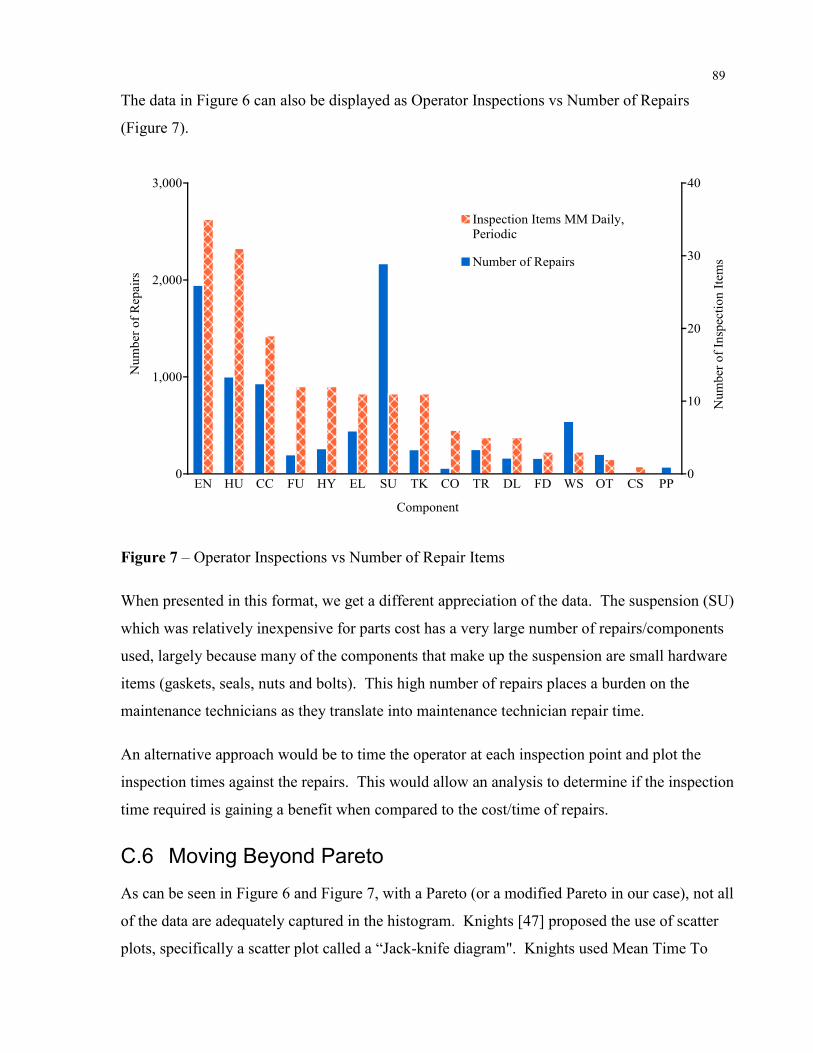
C.6 Moving Beyond Pareto ...................................................................................................... 89
C.7 Observations ...................................................................................................................... 91
C.8 Recommendations.............................................................................................................. 91
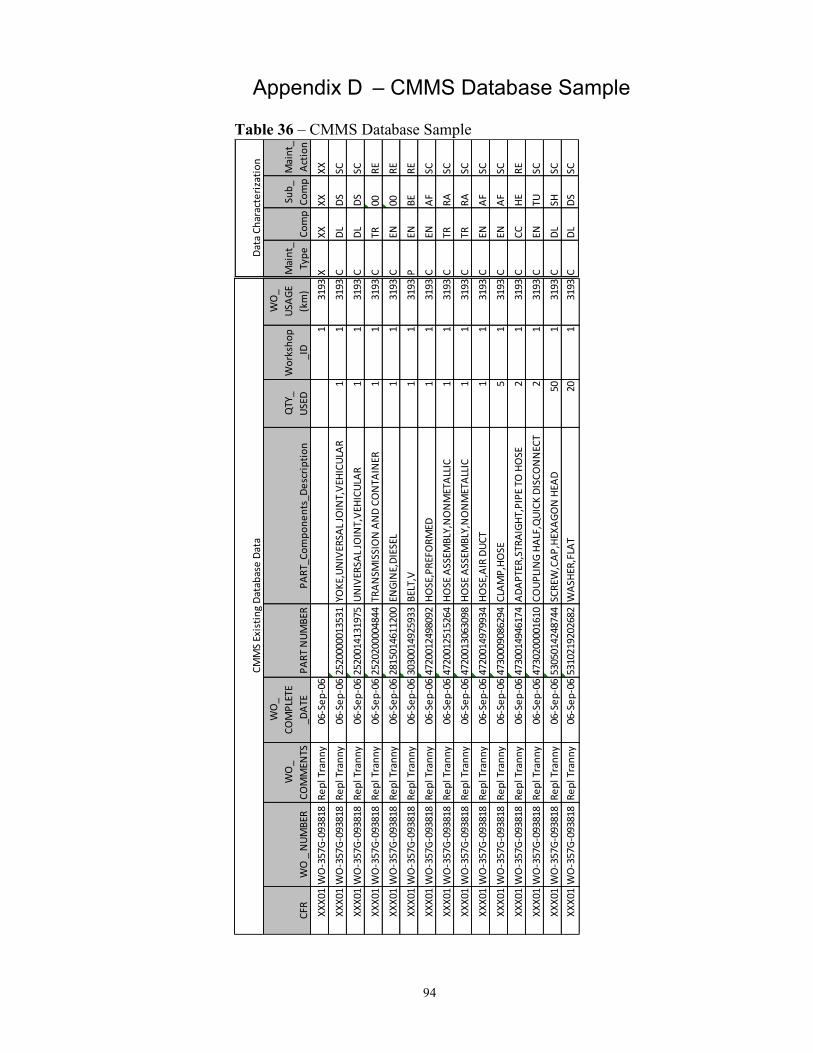
Appendix D – CMMS Database Sample .................................................................................... 94
viii
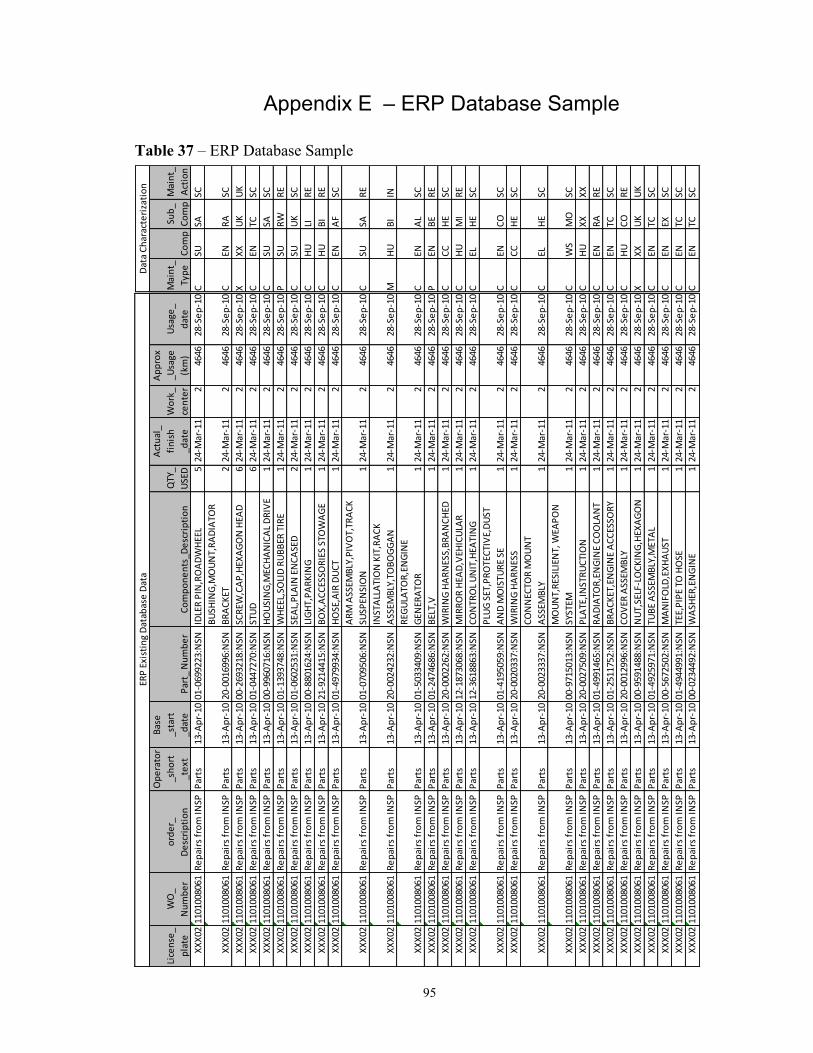
Appendix E – ERP Database Sample ........................................................................................ 95
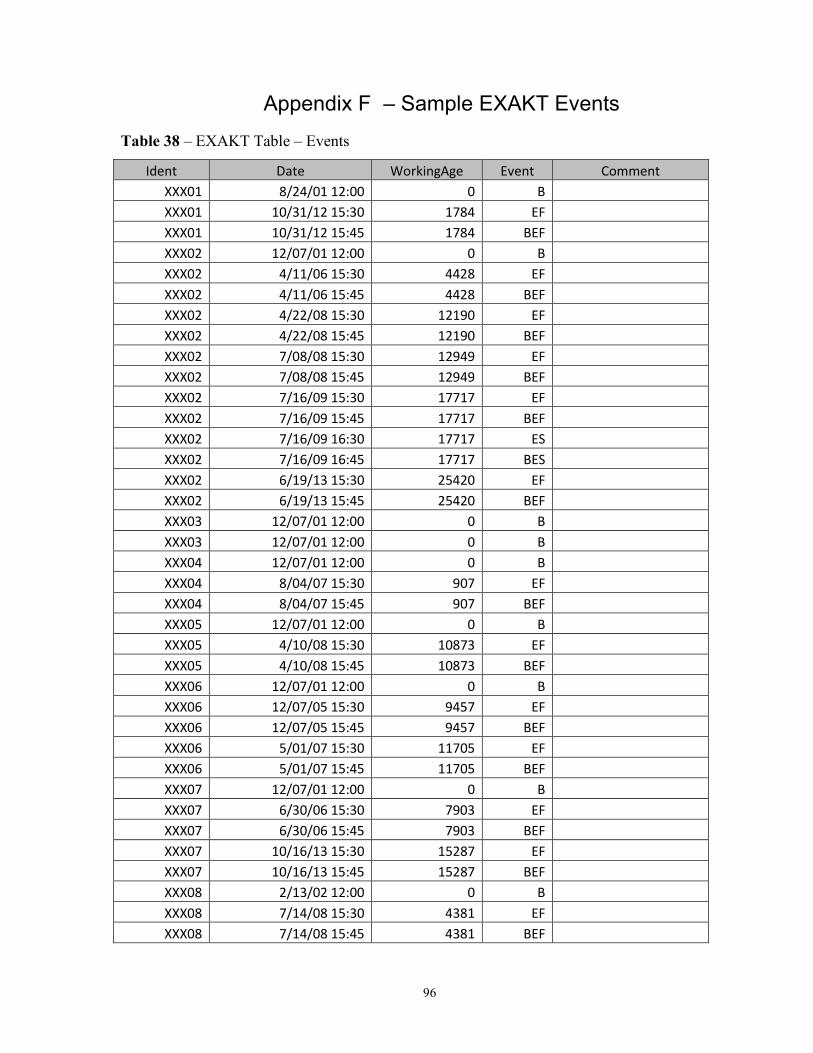
Appendix F – Sample EXAKT Events ...................................................................................... 96
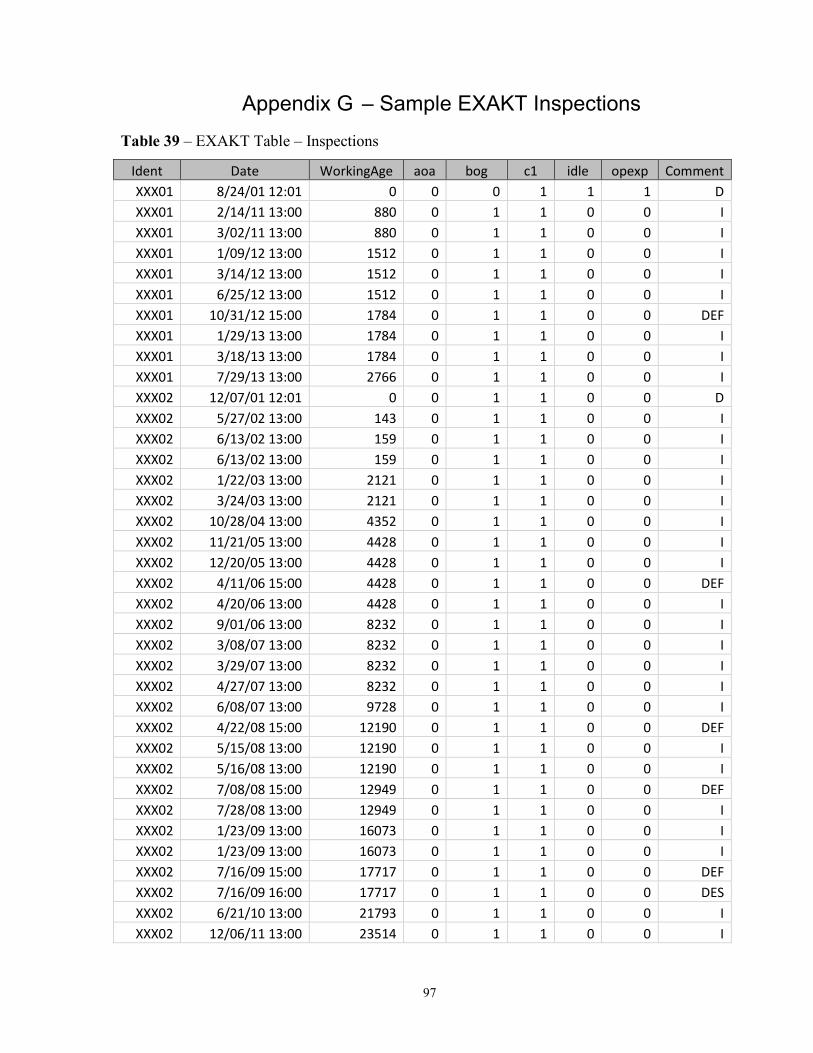
Appendix G – Sample EXAKT Inspections............................................................................... 97
Appendix H – Transmission Location Covariate Reduction...................................................... 98
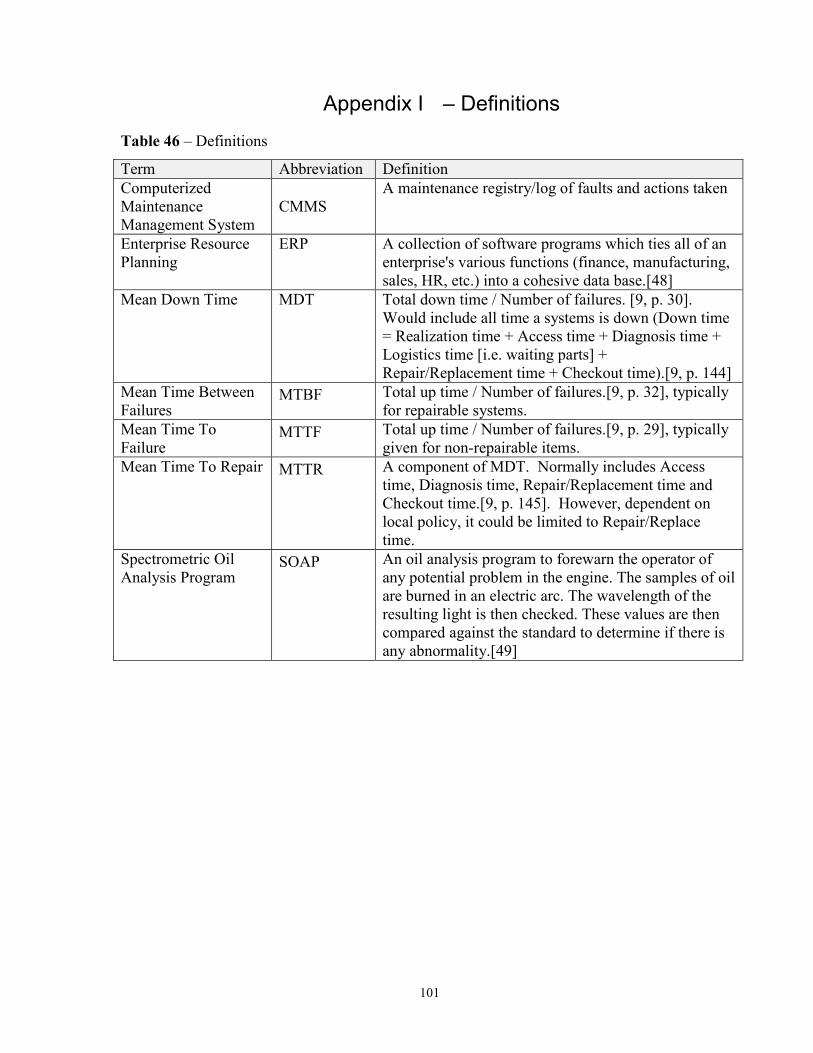
Appendix I – Definitions ........................................................................................................ 101
ix
List of Tables
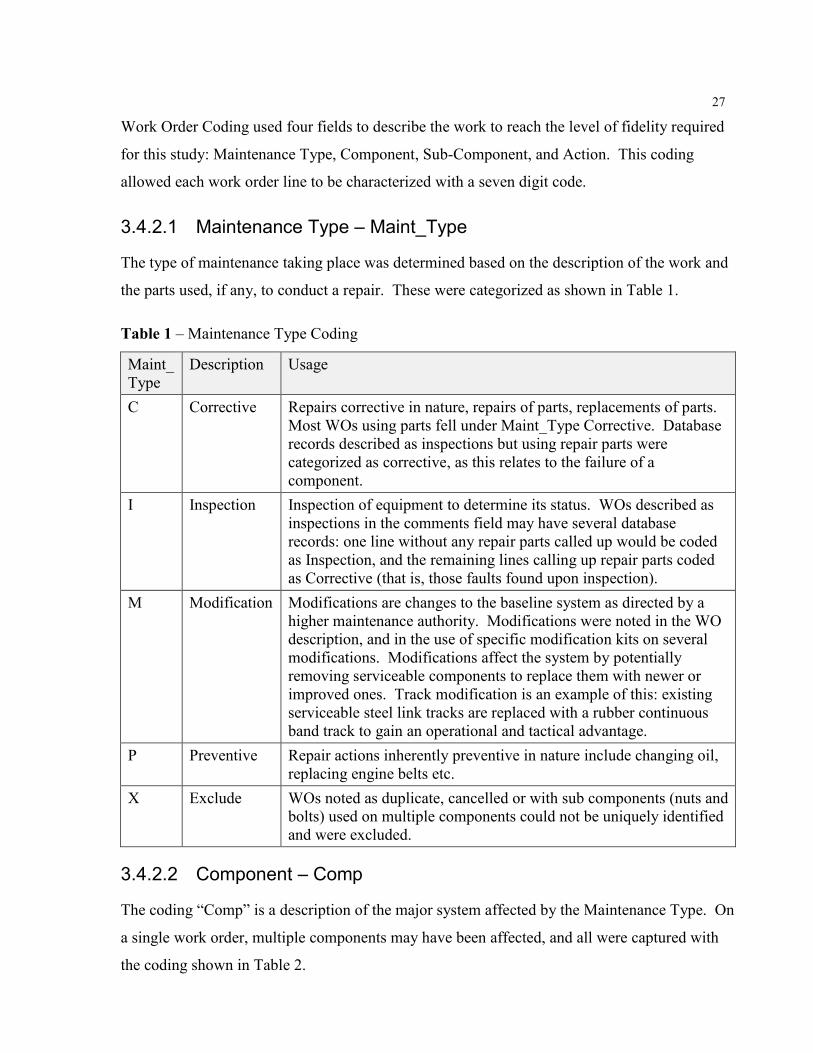
Table 1 – Maintenance Type Coding........................................................................................... 27
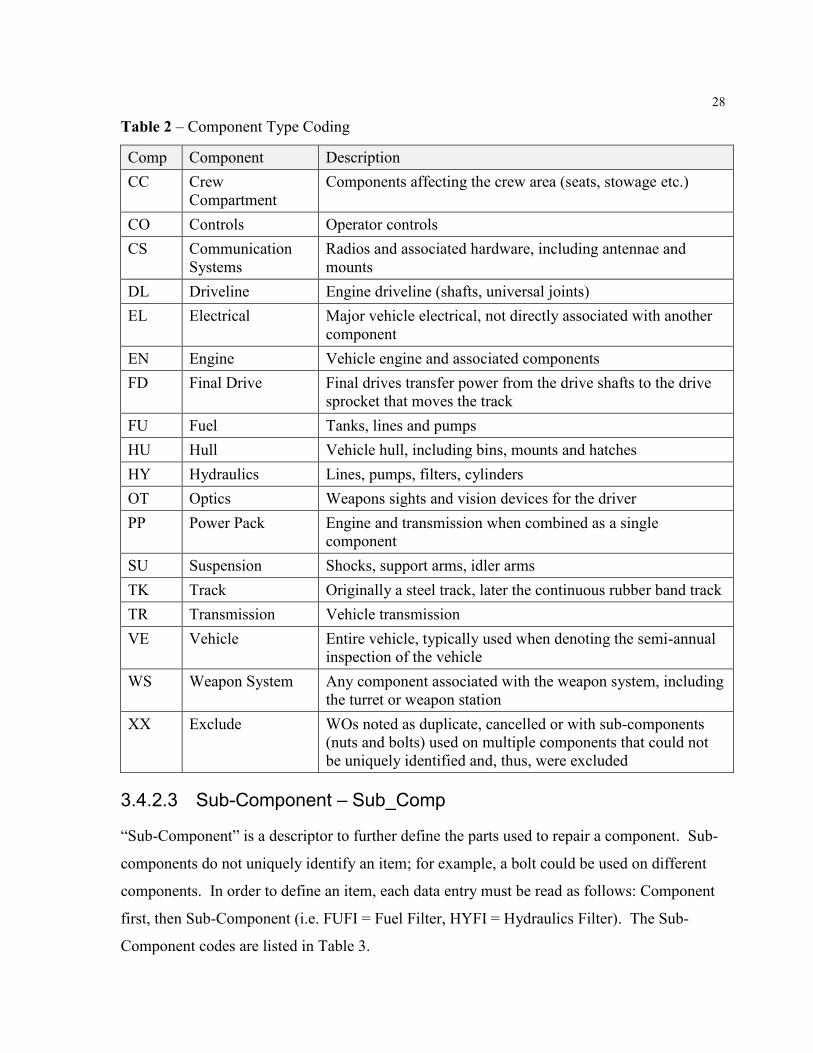
Table 2 – Component Type Coding............................................................................................. 28
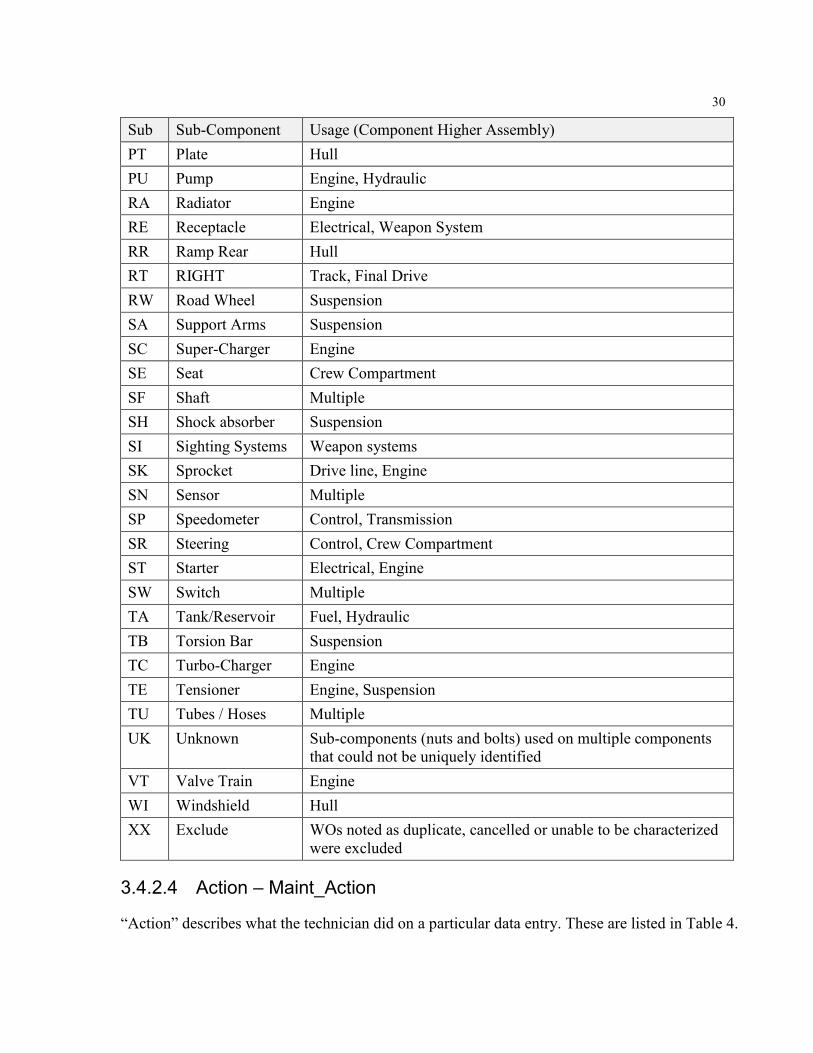
Table 3 – Sub-Component Type Coding ..................................................................................... 29
Table 4 – Maintenance Action Coding ........................................................................................ 31
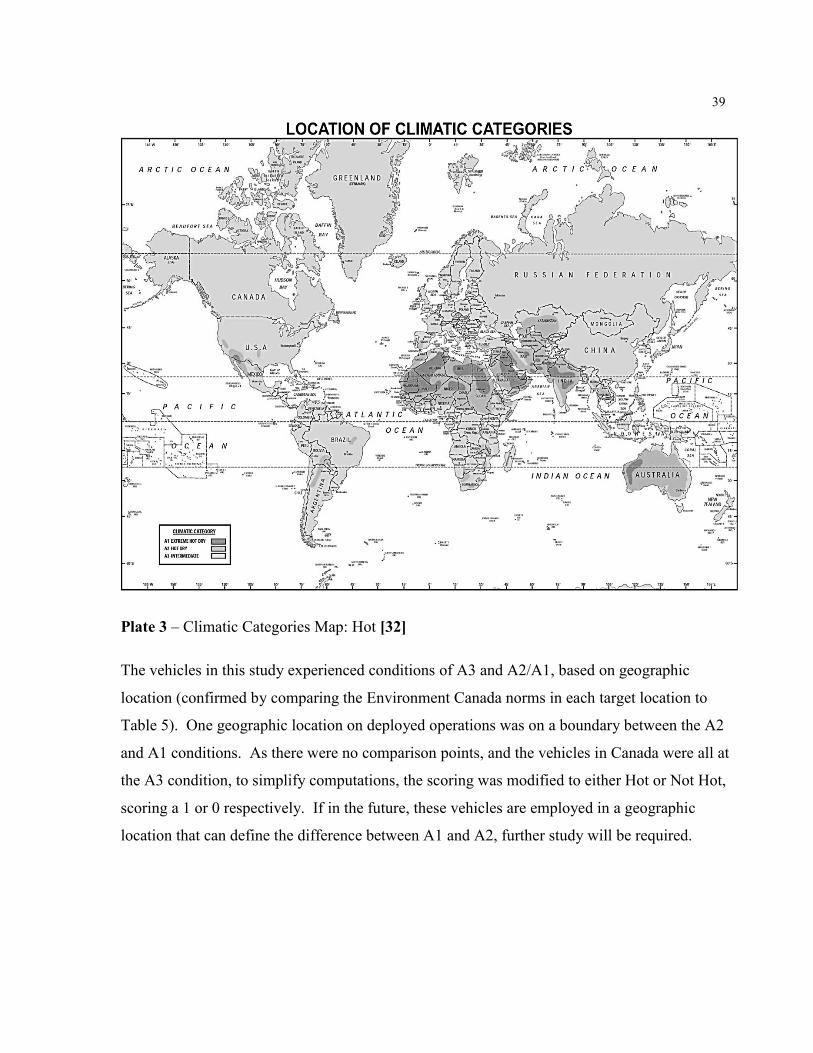
Table 5 – AECPT-230 Summarized Temperature and Humidity Cycles World Wide ............... 37
Table 6 – Covariate Selection Chart ............................................................................................ 43
Table 7 – Environmental Effects ................................................................................................. 45
Table 8 – Event Precedence ......................................................................................................... 48
Table 9 – EXAKT Output Definitions ........................................................................................ 51
Table 10 – Weibull Shape Parameter .......................................................................................... 51
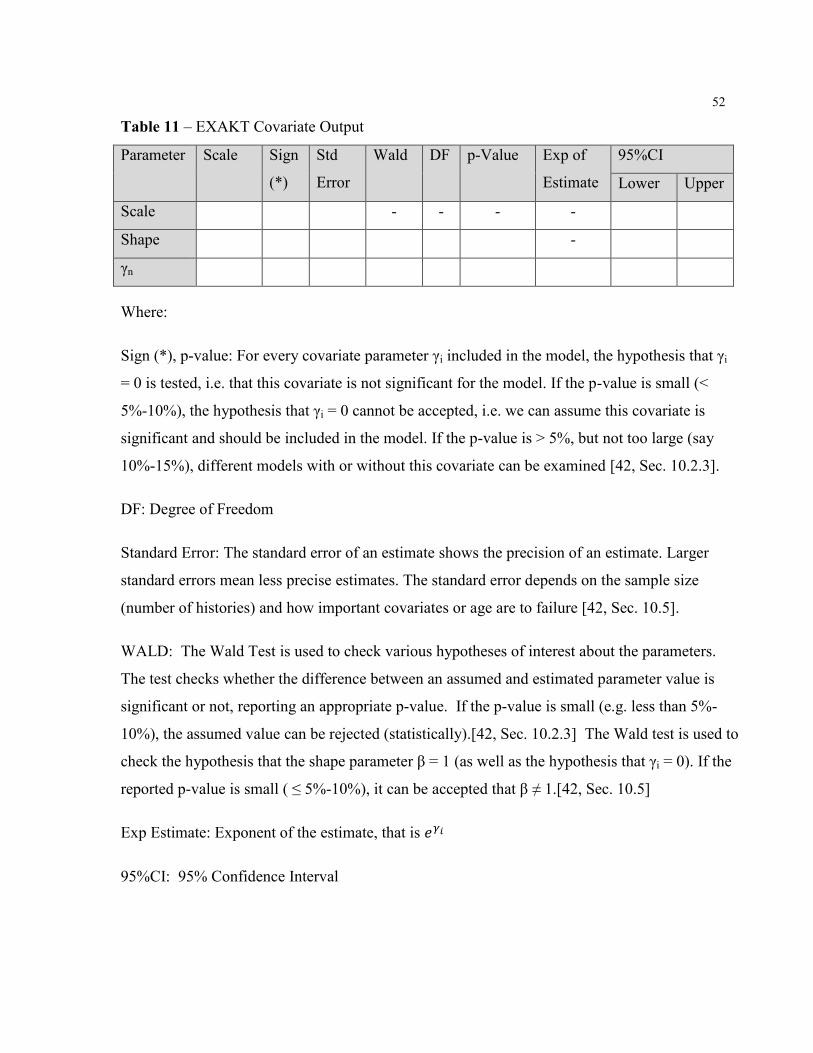
Table 11 – EXAKT Covariate Output ......................................................................................... 52
Table 12 – Transmission Weibull Distribution ........................................................................... 54
Table 13 – Location Covariates ................................................................................................... 55
Table 14 – Transmission Locational Covariates ......................................................................... 55
Table 15 – Transmission Locational Covariates – first reduction step ....................................... 56
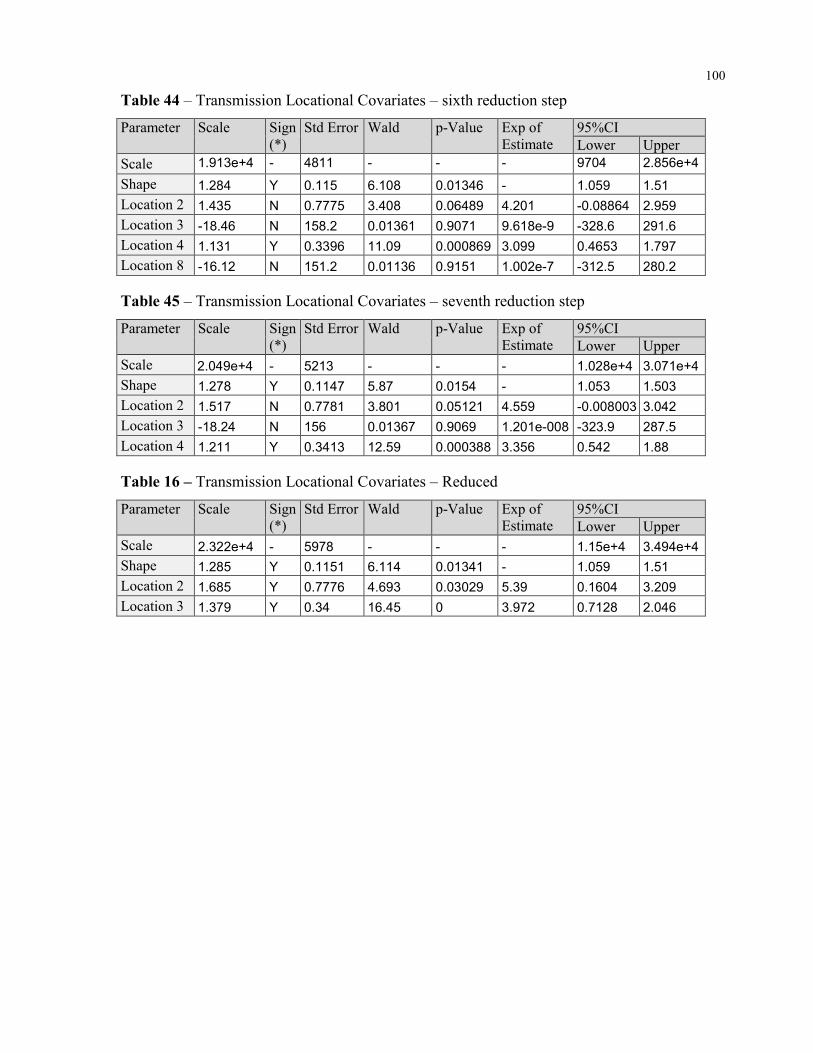
Table 16 – Transmission Locational Covariates – Reduced ....................................................... 56
Table 17 – Transmission Individual Location Analysis .............................................................. 57
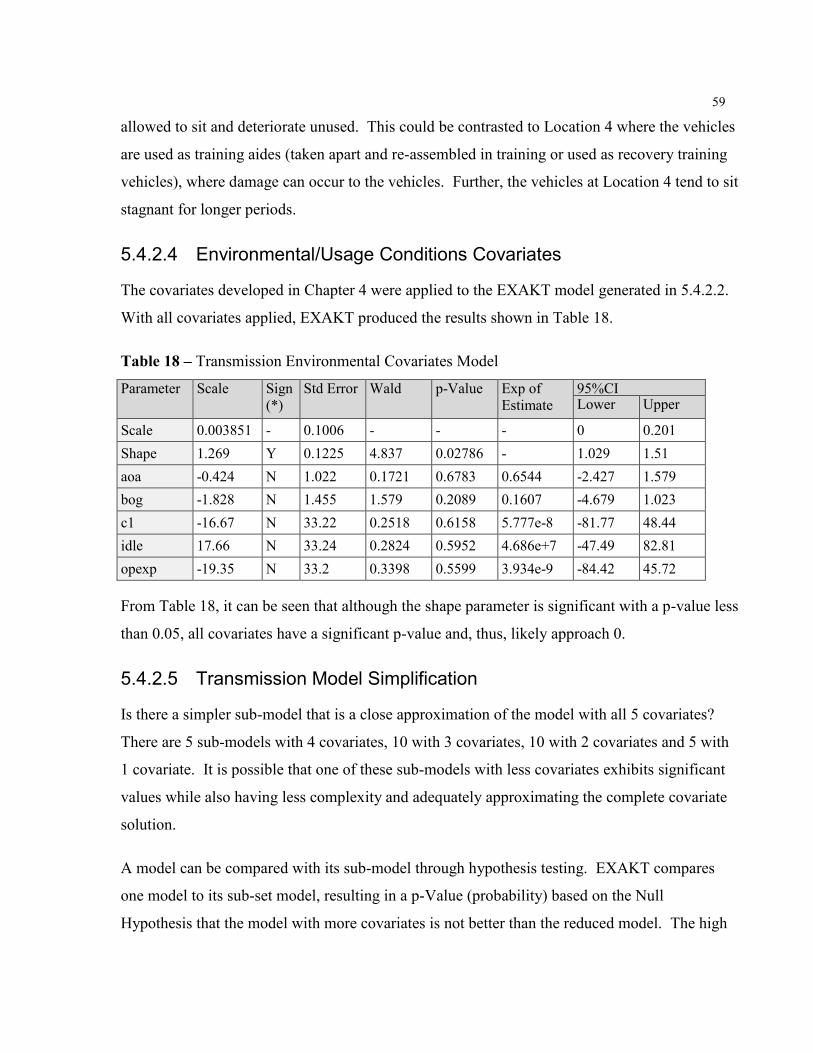
Table 18 – Transmission Environmental Covariates Model ....................................................... 59
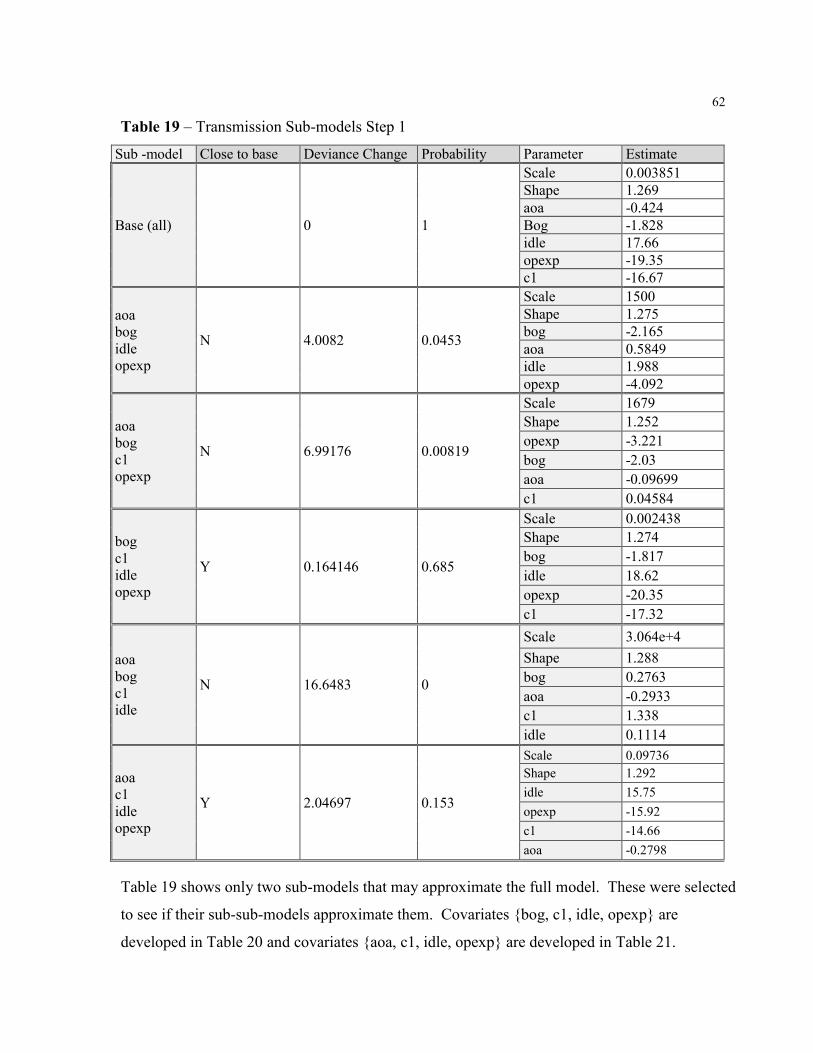
Table 19 – Transmission Sub-models Step 1 .............................................................................. 62
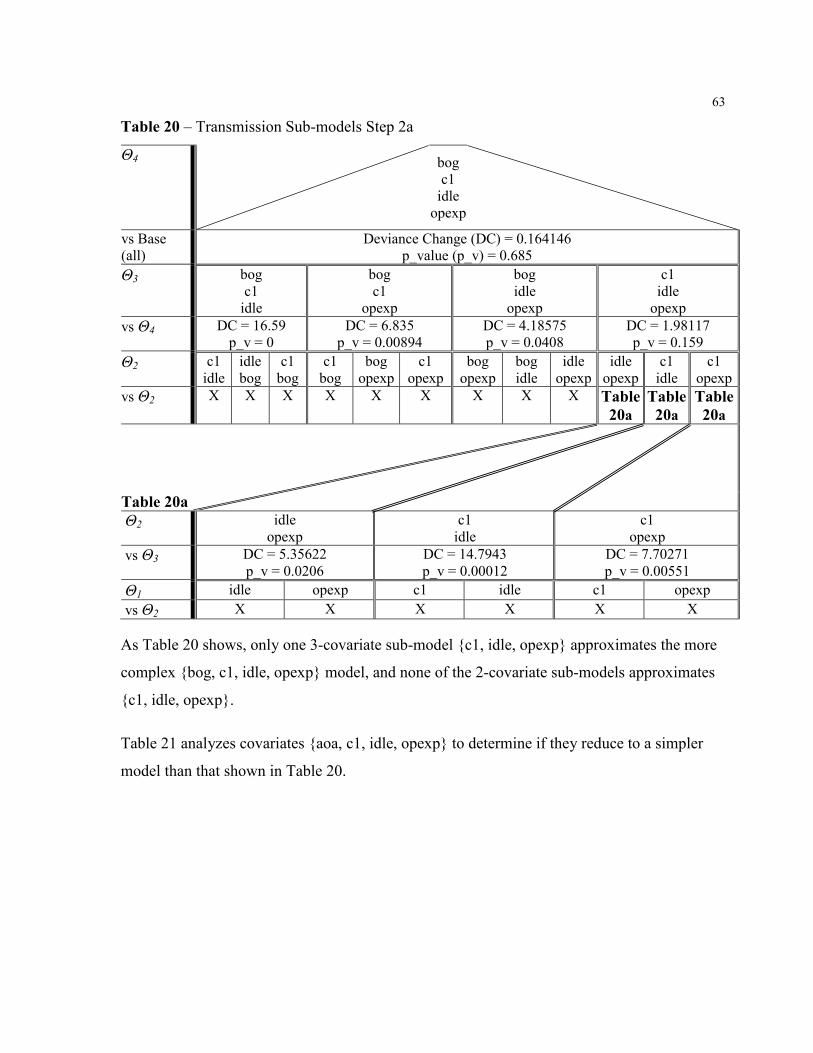
Table 20 – Transmission Sub-models Step 2a ............................................................................. 63
x
Table 21 – Transmission Sub-models Step 2b ............................................................................ 64
Table 22 – Transmission Three Covariate Sub-model ................................................................ 64
Table 23 – Engine Weibull Distribution ...................................................................................... 65
Table 24 – Engine, shape parameter = 1 ..................................................................................... 65
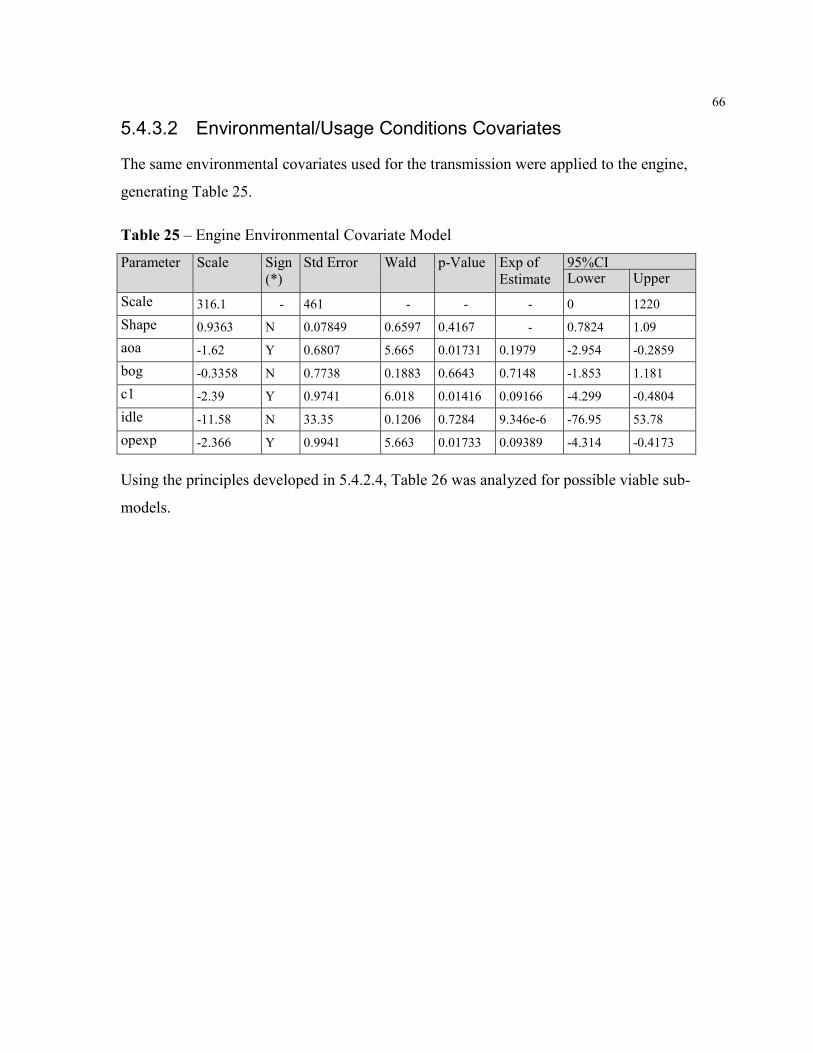
Table 25 – Engine Environmental Covariate Model ................................................................... 66
Table 26 – Engine Sub-model Step 1 .......................................................................................... 67
Table 27 – Engine Sub-models Step 2a ....................................................................................... 68
Table 28 – Engine Sub-models Step 2b ....................................................................................... 69
Table 29 – Engine Three Covariate Sub-model .......................................................................... 70
Table 30 – Weibull Distribution .................................................................................................. 70
Table 31 – Summary of Hazard Functions for the M113 ............................................................ 72
Table 32 – Spare Parts Calculation Example .............................................................................. 76
Table 33 – ERP File Data Definition ........................................................................................... 84
Table 34 – CMMS File Data Definition ...................................................................................... 85
Table 35 – TLAV Maintenance Manual and 1136 Comparison Chart ....................................... 93
Table 36 – CMMS Database Sample .......................................................................................... 94
Table 37 – ERP Database Sample ............................................................................................... 95
Table 38 – EXAKT Table – Events ............................................................................................. 96
Table 39 – EXAKT Table – Inspections ..................................................................................... 97
Table 40 – Transmission Locational Covariates – second reduction step ................................... 98
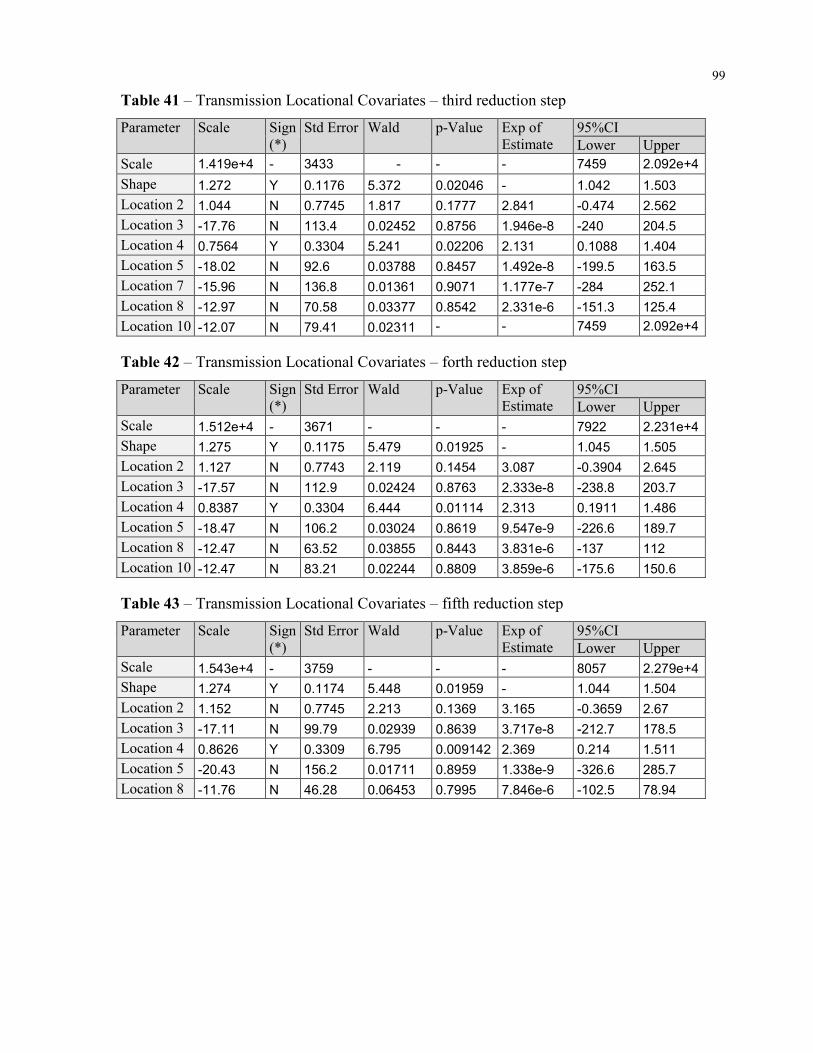
Table 41 – Transmission Locational Covariates – third reduction step ...................................... 99
xi
Table 42 – Transmission Locational Covariates – forth reduction step ...................................... 99
Table 43 – Transmission Locational Covariates – fifth reduction step ....................................... 99
Table 44 – Transmission Locational Covariates – sixth reduction step .................................... 100
Table 45 – Transmission Locational Covariates – seventh reduction step ................................ 100
Table 46 – Definitions ............................................................................................................... 101
xii
List of Plates
Plate 1 – TLAV - M113A3 ............................................................................................................ 5
Plate 2 – Climatic Categories Map: Cold [32] ............................................................................ 38
Plate 3 – Climatic Categories Map: Hot [32] .............................................................................. 39
Plate 4 – Climatic Categories Map: Hot–Humid [32] ................................................................. 40
Plate 5 – Log Scatterplot Showing Limit Values from Knights .................................................. 90
xiii
List of Figures
Figure 1 – Preventive Maintenance Work Flow .......................................................................... 12
Figure 2 – Corrective Maintenance Work Flow .......................................................................... 13
Figure 3 – DIKW Pyramid .......................................................................................................... 19
Figure 4 – Example EXAKT Equipment Component Life History ............................................ 48
Figure 5 – Repair Cost Pareto Histogram .................................................................................... 87
Figure 6 – Operator Inspections vs Costs of Repair .................................................................... 88
Figure 7 – Operator Inspections vs Number of Repair Items ...................................................... 89
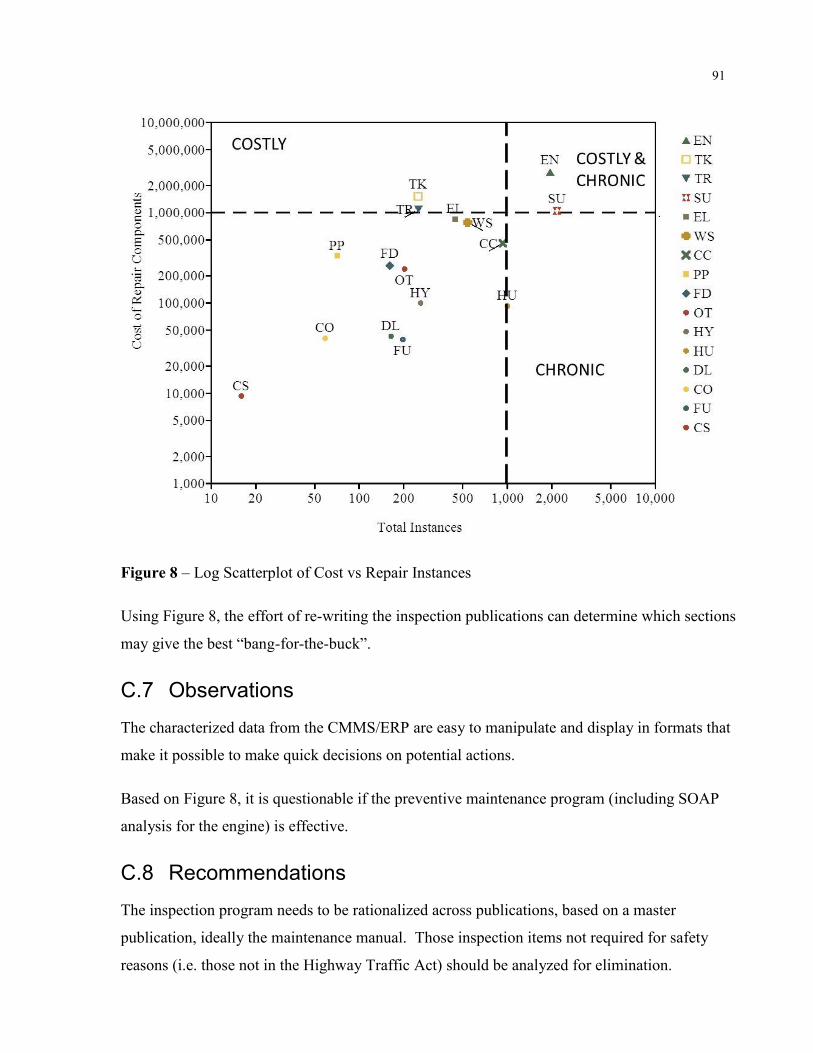
Figure 8 – Log Scatterplot of Cost vs Repair Instances .............................................................. 91
xiv
List of Appendices
Appendix A – ERP File Labels .................................................................................................. 84
Appendix B – CMMS File Labels ............................................................................................. 85
Appendix C – Preventive Maintenance Analysis....................................................................... 86
Annex 1 to Appendix C ............................................................................................................ 93
Appendix D – CMMS Database Sample .................................................................................... 94
Appendix E – ERP Database Sample ........................................................................................ 95
Appendix F – Sample EXAKT Events ...................................................................................... 96
Appendix G – Sample EXAKT Inspections............................................................................... 97
Appendix H – Transmission Location Covariate Reduction...................................................... 98
Appendix I – Definitions ........................................................................................................ 101
xv
List of Acronyms and Abbreviations
Abbreviation Meaning
AECTP Allied Environmental Conditions and Test Publication
AoA Add on Armour
APC Armoured Personnel Carrier
ARVL Armoured Recovery Vehicle Light
CAF Canadian Armed Forces
CBM Condition Based Monitoring
CF Canadian Forces
CFR Canadian Forces Registration
CM Corrective Maintenance
CMMS Computerized Maintenance Management System (see Appendix I –
Definitions)
C-MORE The Centre for Maintenance Optimization and Reliability Engineering
Cu Copper
DIKW Data-Information-Knowledge-Wisdom
DND Department of National Defence (Canada)
DoD Department of Defense (United States of America)
DRMIS Defence Resource Management Information System
Eqpt Equipment
ERN Equipment Registration Number
ERP Enterprise Resource Planning (see Appendix I – Definitions)
EXAKT The name of a Condition Based Monitoring software
Fe Iron
FMS Fleet Management System
FOV Family of Vehicles
Ident Identity
km Kilometre
LEMS Land Engineering Maintenance System
M113 An armoured vehicle
MRT Mobile Repair Team
MTBF Mean Time Between Failure (see Appendix I – Definitions)
MTBR Mean Time Between Replacements
MTTF Mean Time To Failure (see Appendix I – Definitions)
MTTR Mean Time To Repair (see Appendix I – Definitions)
xvi
MTV Mobile Tactical Vehicle
MTVL Mobile Tactical Vehicle Light
NATO North Atlantic Treaty Organization
NSN NATO Stock Number
OEM Original Equipment Manufacturer
PHM Proportional Hazards Model
PLANNEx PLANN Expert – a CMMS program
PM Preventive Maintenance
ppm Parts per million
RWS Remote Weapon Station
SAP A brand name of an ERP
SMS Spares Management Software
SOAP Spectrometric Oil Analysis Program
TLAV Tracked Light Armoured Vehicle
WO Work Order
1
Chapter 1
Introduction
1.1 Overview
The Canadian Armed Forces deploys vehicles, equipment, supplies and personnel on a variety
of operational missions, both domestically and internationally. Additionally, these same
equipment and vehicle types are used for a variety of training scenarios, from individual driver
training to large formation training exercises. In these deployments the vehicles experience a
wide variety of operating conditions and scenarios over their lifetime.
This thesis introduces a system to characterize data in maintenance databases and a method of
developing a proportional hazards model (PHM) to model the effects of various environmental
conditions on those vehicles used in the various geographic locations.
1.2 Army
The Canadian Army, Canada’s land element, along with the Royal Canadian Navy, Royal
Canadian Air Force and others, form the Canadian Armed Forces(CAF) (formerly the Canadian
Forces(CF)), which is supported by the Department of National Defence. The Canadian Army
is equipped with a variety of vehicles and systems that are employed by units to conduct training
and operations in a variety of environments with varying intensities. The equipment is
supported with spare parts provided from a multi-tiered supply chain, with maintenance
technician support from uniformed army mechanics, Department of National Defence civilian
employees, as well as internal and external contractors.
1.3 Data Management Systems
In order to support maintenance operations the DND uses a software solution to provide the
following[1]:
1. a centralized repository for land technical equipment data, costs and technical information;
2. storage of land technical equipment preventive maintenance plans, and the generation and
tracking of preventive maintenance work;
2
3. the management tools for processing control documentation, resource management, and
interfacing with other Canadian Forces systems; and
4. the ability to collate information to measure equipment and workshop performance.
For a number of years, the Canadian Army used a Computerized Maintenance Management
System (CMMS) called PLANN Expert, which ran locally on workshop computers and was
updated to a central server manually. Starting in the late 2000s, the Canadian Armed Forces and
the Department of National Defence began conversion to an integrated Enterprise Resource
Planning (ERP) software solution based on the SAP product known as the Defence Resource
Management Information System (DRMIS). DRMIS combines finance, task notification, work-
order documentation, inventory control, purchasing and other processes (modules) into a Forces
wide system.
The collection of data into DRMIS for the Canadian Armed Forces is an on-going process,
similar to the collection process undertaken by many industries and government organizations
around the world. PLANN Expert was the first real CMMS used by the Canadian Army; in
effect, the data were stored on “electronic paper” in a manner similar to how they were filed
prior to computerization. On some levels, the “electronic paper” data records are treated like
paper records. The information is kept closely bound and filed in discrete locations (similar to
filing papers in a cabinet) where it accumulates, ultimately becoming hard to process or access
in a meaningful manner. The ERP system with its interlinked data seeks to move away from
this model; in this system, the data are accessible and configurable, allowing decisions to be
made in a timely manner based on the stored data. Unfortunately, with the migration from the
PLANN Expert CMMS to the DRMIS ERP, some of the same attitudes towards and
expectations of the electronic data have remained. The system may not be used to its full
potential; indeed, in some instances, the users entering the data are treating the inputs simply as
data required to feed the system in order to get to the next step or screen.
1.3.1 DRMIS Data
DRMIS was implemented on a rollout, location-by-location across the Canadian Army. As
locations went “live,” data were imported from the previous system, and technicians began
3
working in the SAP DRMIS program. As such, to cover the full period of service life of
equipment, this thesis has had to analyze data from both PLANN Expert and DRMIS and
synthesis them into a single database. Thus, a complete data record for most systems contains
both older PLANN Expert data and newer DRMIS entries.
DRMIS contains multiple modules and data sources. Some data sources are resident within
DRMIS, some come from user inputs, others are tombstone data (established non-changing data
such as vehicle identification numbers), and still others are inputs from other database systems.
The entire DRMIS database is too complex and large to analyze and contains data not relevant
to the study of system reliability. The data used for this thesis comprise an extract from the SAP
system concerning vehicle maintenance on a specific fleet output to a Microsoft Excel file. The
format for the data is located in the appendices: DRMIS (ERP) data format appears in Appendix
A, PLANN Expert (CMMS) in Appendix B. In each of these extracts, the data were based on
unique work order numbers assigned to specific pieces of equipment at specific times.
1.4 Vehicle System
Although the Canadian Armed Forces has a variety of vehicles, ships and planes, this thesis has
selected the Tracked Light Armoured Vehicle (TLAV)(also known as the M113A3) for study.
The TLAV has been used in various locations and experiences a wide variety of usage patterns
and environmental conditions. It has been used in high intensity operations in hot dry locations
and during training in muddy, wet and cold conditions. Certain TLAVs have also sat for
extended periods either while the assigned users were deployed on Operations, or while the
vehicle was in transit to a new location or being held in reserve. This non-homogeneous
environmental and usage history can be complex. Specifically, the complex usage history
complicates the ERP’s ability to produce information that the fleet managers can use to modify
or improve the existing maintenance processes or practices.
1.4.1 M113 History
The current TLAV Family of Vehicles (FOV) is based on the M113 armoured vehicle platform
developed by the United States of America and introduced into service in the early 1960s.
Canada began acquiring the M113 in the 1960s; over several years, Canadian Army units were
4
equipped with these vehicles. Subsequent to purchase, Canada upgraded and converted to the
M113A2 variant which featured some performance upgrades as well as externally mounted fuel
tanks on the rear sponsons.
Primarily purchased as an Armoured Personnel Carrier (APC) vehicle for the infantry,
command and support variants based on the same chassis were also acquired. In addition to the
APC, the M113A2 family of vehicles included: a command version, the M577 Command Post;
a supply vehicle, the M548 Cargo Carrier; the Air Defence Anti-Tank System (ADATS); the
Tube-launched optically wire-guided Under Armour (TUA); a combat engineering vehicle with
dozer blade; the M113 Fitter, a Mobile Repair Team (MRT) maintenance vehicle; the Armoured
Recovery Vehicle Light (ARVL), a maintenance recovery variant; the Damaged Airfield
Reconnaissance Explosive Ordnance Disposal (DAREOD); and the Improved Land-Mine
Detection System (ILDS).
The M113A2 saw extensive service in Canada both as a training vehicle and for domestic and
international operations and was used heavily by 4 Canadian Mechanized Brigade Group
(4CMBG) while deployed to Germany during the Cold War. The M113 is widely used
throughout the world with production numbers in excess of 80,000 over 40 plus years of
production, making it one of the most common armoured vehicle platforms in service.[2]
Over several years in the late 1990s and 2000s, the Armoured Personnel Carrier Life Extension
project developed and produced several hundred new upgraded systems called TLAVs which
were upgraded from the M113A2 chassis, with the remainder of the M113A2s declared surplus
and removed from inventory.
This mid-life reset of the M113A2 to the TLAV resulted in considerable changes to the fleet
with significant performance upgrades. With the TLAV, two hull designs were implemented;
the M113A3 hull based on the M113A2, and the Mobile Tactical Vehicle (MTV) hull which
took existing M113A2 hulls, cut them and extended them to fit an additional road wheel,
allowing increased suspension and carrying capacity.
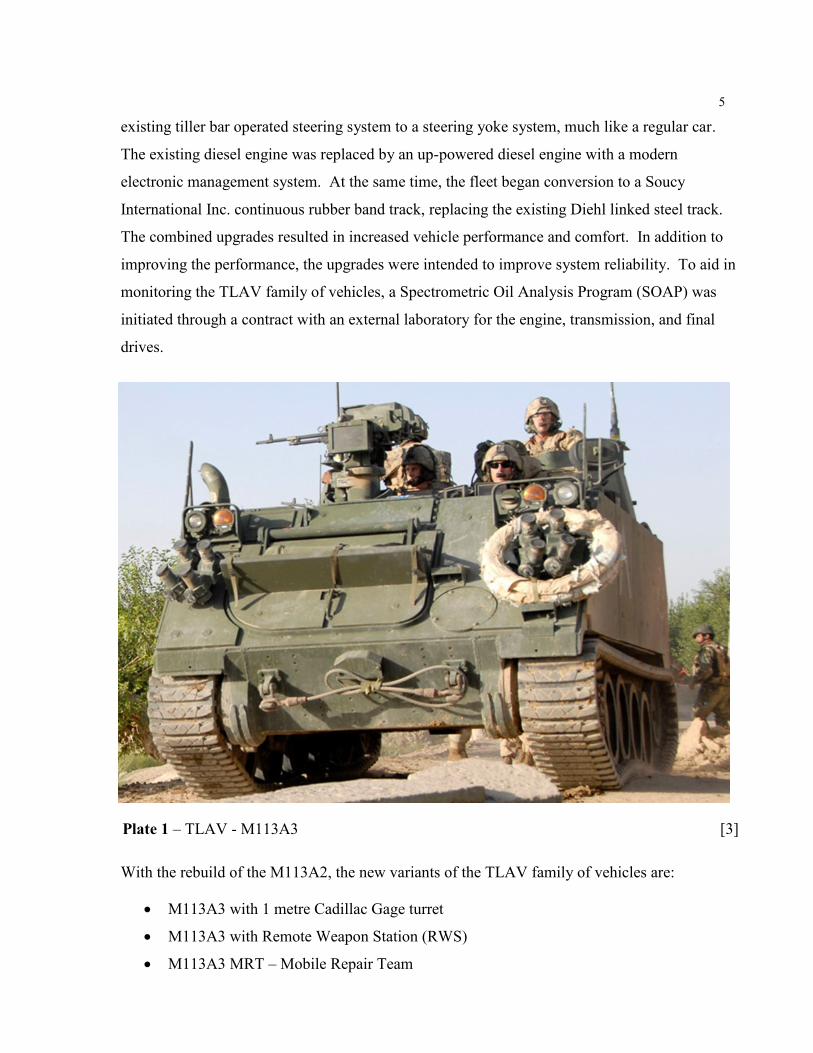
For both the M113A3 and the MTV, upgrades were made to the drive-train, armour protection,
operator systems, weapon systems and vehicle electronics. The vehicle was converted from the
5
existing tiller bar operated steering system to a steering yoke system, much like a regular car.
The existing diesel engine was replaced by an up-powered diesel engine with a modern
electronic management system. At the same time, the fleet began conversion to a Soucy
International Inc. continuous rubber band track, replacing the existing Diehl linked steel track.
The combined upgrades resulted in increased vehicle performance and comfort. In addition to
improving the performance, the upgrades were intended to improve system reliability. To aid in
monitoring the TLAV family of vehicles, a Spectrometric Oil Analysis Program (SOAP) was
initiated through a contract with an external laboratory for the engine, transmission, and final
drives.
[3]
With the rebuild of the M113A2, the new variants of the TLAV family of vehicles are:
M113A3 with 1 metre Cadillac Gage turret
M113A3 with Remote Weapon Station (RWS)
M113A3 MRT – Mobile Repair Team
Plate 1 – TLAV - M113A3
6
M577A3 Command Post
MTVR – Mobile Tactical Vehicle Recovery
MTVE – Mobile Tactical Vehicle Engineer
MTVL with turret
MTVL with RWS
MTVF – Mobile Tactical Vehicle Fitter (Mobile Repair Team with RWS)
MTVA – Mobile Tactical Vehicle Ambulance
The introduction of turrets and RWS upgrades modified how the Army employed the M113A2,
as the TLAV demonstrated increased capabilities.
The introduction of the TLAV into service also happened to coincide with the operational
requirement for this type of vehicle in Afghanistan. The TLAV with the Soucy rubber track saw
considerable service in Afghanistan and among units in Canada training for deployment.
The M113A3’s recent re-fit and the long history and extensive use of this vehicle platform make
it an interesting vehicle for study and a good basis for devising a maintenance solution
applicable to other platforms.
1.5 Research Motivation
I was motivated to study the M113 as it has seen widespread use by many militaries; given its
deployment to different locations, it is a good candidate to study the environmental effects of
location on the reliability of a vehicle.
1.5.1 Main Research Objective
My main research objective was to develop a mechanism to quickly characterize locations using
a standard convention. These locations could then form the covariates influencing the
proportional hazards model for the component being studied. Further, I wanted to be able to use
this model to calculate spare parts requirements for locations with different combinations of
covariates, even for combinations the vehicle has yet to experience.
7
1.5.2 Secondary Research Objective
My secondary research objective was to develop a method to improve the structure of a
maintenance database to allow it to be quickly searched for work orders applicable to the
component under investigation.
1.6 Thesis Structure
Following the introduction, I will detail the maintenance process in Chapter 2, concentrating on
the maintenance process for the M113 in the Canadian Army inventory. This chapter also
includes a literature review of the definition and concept of preventive maintenance and offers
an alternative definition. Chapter 3 introduces the concept of taking raw unstructured data and
transforming and improving them into useful information; importantly, this chapter details a
method to characterize the data to make them quickly and efficiently searchable. Chapter 4
defines the effects of environmental factors on the vehicle and establishes a standardized
classification system. Chapter 5 develops the proportional hazards model for the transmission,
engine and suspension systems using the covariates developed in Chapter 4. I finish the main
body of the work with conclusions and suggest possible future work. The appendices contain
supporting information and tables as well as a study on the preventive maintenance program of
the M113 based on the characterized database developed in Chapter 3.
8
Chapter 2
Maintenance Processes
2.1 Canadian Army Maintenance
The Canadian Department of National Defence (DND) establishes its strategic Maintenance
Policy in a series of keystone publications. These publications, in combination with equipment
specific publications, provide direction and guidance to units holding equipment as to which
actions are to be taken to support that equipment. These publications define both what
maintenance is done and who does the maintenance. This is accomplished through a system
known as Lines and Levels of maintenance.
Levels of Maintenance are defined as “a measure of the work content, complexity or depth of a
maintenance support task” [4, Ch. 3]. There are four levels of maintenance: level one is the
lowest, indicating basic repair tasks; level four is the highest, indicating extensive maintenance
resources. In greater detail[4, p. 3]:
Level One. Generally involves preventive maintenance, fault finding and limited
corrective maintenance. Tasks are usually of limited complexity and short
duration. Examples of level one tasks include:
a. servicing and serviceability checks by both operator and technician;
b. periodic equipment inspections;
c. fault finding and preliminary diagnosis including classification of
equipment casualties;
d. preservation/de-preservation;
e. adjustments;
f. minor modifications;
g. replacement of parts or components before failure; and
h. replacement of failed parts, modules and components.
Level Two. Primarily involves intermediate corrective maintenance, typically
including:
a. replacement of components (including major assemblies) within
equipments or systems;
b. modifications;
9
c. repair to components and modules; and
d. detailed diagnostics and inspections.
Level Three. Involves more extensive and complex maintenance tasks that may
involve the use of a production line, special test equipment, and limited
manufacture. These tasks generally include:
a. adjustments and alignment of complete equipments and systems;
b. reconditioning of assemblies, equipments and systems, such as
engines, drive trains, guns, and electrical/electronic assemblies;
c. major modifications;
d. reclamation; and
e. calibration of electrical/mechanical test and diagnostic equipment.
Level Four. Involves the complete overhaul of equipment that generally
includes:
a. conducting salvage operations;
b. fabrication of parts;
c. returning an item or equipment to its original specifications, or to a
specified standard;
d. retrofit;
e. effecting mid-life improvements; and
f. extending the planned economical life of an equipment.
In conjunction with levels of maintenance, the lines of maintenance indicate the organization
performing the maintenance. Tasks are assigned to lines of maintenance considering such
factors as: time, tactical situation, tools, test equipment, mobility and repair parts. The
overriding factor is time. Lines of maintenance are divided into four lines, with the first line
being the most tactical and mobile in nature and the fourth being the most strategic. In greater
detail [4, p. 5]:
First Line. First line maintenance organizations are normally the first
maintenance organization to which the user turns. It principally performs level
one and possibly limited level two maintenance tasks. No task of more than
four (4) hours duration will normally be assigned to first line, regardless of the
10
level of maintenance involved. These resources could be augmented by
crews/operators from second line.
Second Line. The next higher maintenance organization. It principally
performs level two and limited level three maintenance tasks. It also carries
out level one technical maintenance services for those organizations without
integral maintenance support and handles overload from first line maintenance
organizations. Second line workshops have greater carrying capacities,
availability of repair tooling and decreased proximity to the enemy compared to
first line workshops. Time is again the overriding factor with the task duration
limits set at 12 hours for mobile repair team (MRT) in-situ repairs and 24
hours at the main workshop location.
Third Line. Third line maintenance organizations have limited mobility and
perform more specialized and/or more complex maintenance tasks. They
perform level three tasks as well as lesser level tasks as a back-up for the
formations/units it supports. In this regard, they may provide level one
maintenance services to units lacking maintenance self-sufficiency. Third line
maintenance organizations also have access to civilian industry. Depending on
the roles of the formations/units supported, MRTs and recovery equipment may
form part of this organization's resources. While a third line organization is
primarily a backup to second line, depending on the situation a significant
amount of its effort can be devoted to reconditioning equipment and assemblies
for return to the supply system rather than to a particular user. While second
line is mainly limited by time available, third line is limited by plant capacity.
All static workshops have limited third line capabilities.
Fourth Line. Fourth line maintenance organizations perform level four
maintenance tasks and those level three tasks that cannot be done by second
and third line maintenance organizations. They also carry out all levels of
repair on stock held at supply depots that cannot be done by second or third line
maintenance organizations. This line of support is not subject to the restrictions
of lower lines and has access to civilian industry giving it unlimited
11
maintenance and fabrication capability. Fourth line is the highest line of
maintenance organizations within LEMS and includes both 202 Workshop
Depot and manufacturers/contractors/original equipment manufacturers
(OEM).
The data in the CMMS and ERP used in support of this thesis for the TLAV family of vehicles
were generated while conducting Level One and Level Two maintenance at primarily First and
Second Line maintenance organizations, with some limited Third Line organizations performing
Level One and Two maintenance in support of maintaining contingency stock or shipping
vehicles to and from operational theatres. Level Three and Four maintenance was not captured
in the CMMS and ERP dataset.
The maintenance conducted on the fleet during the period of study involved: preventive
maintenance consisting of inspections and replacement of wear items; SOAP, a predictive
maintenance process; corrective maintenance via repair, or replacement; and modifications to a
vehicle subsystem due to safety, performance or engineering upgrades.
2.2 Spectrometric Oil Analysis Program (SOAP)
SOAP attempts to determine the status of a component by analyzing the state of an oil or fluid
sample taken from that system. For an internal combustion engine, SOAP may analyze various
factors; for example, measuring the quantities of particulates of metals could indicate the
breakdown of specific sub-components or assemblies within the engine. SOAP can also be used
to measure contamination from other liquids (water, coolant, fuel) which could indicate leaks in
the system or gasket/seal failures. This can help to diagnose a fault.
SOAP can determine the mechanical properties of a fluid (engine oil, transmission fluid,
coolant). It can measure such things as viscosity, break-down or degradation of additives and
contamination to determine if the fluid should be replaced. This can potentially lead to large
economic savings in a time based replacement policy, especially when dealing with expensive
specialized fluids like transmission fluid. When the cost of the fluid is factored across a large
vehicle fleet (with high volume transmissions) the economic benefit is even more evident.
12
2.3 Generalized Maintenance Process
The maintenance process for physical mobile assets can be visualized for both a preventive
maintenance process (Figure 1) and a corrective maintenance process (Figure 2). Best practices
clearly define and assign responsibilities at each step in the process, integrating them with a
record keeping system (now often computerized as a CMMS or as part of an ERP). Even in
workshops with an ad-hoc work process, the workflow will follow these general steps.
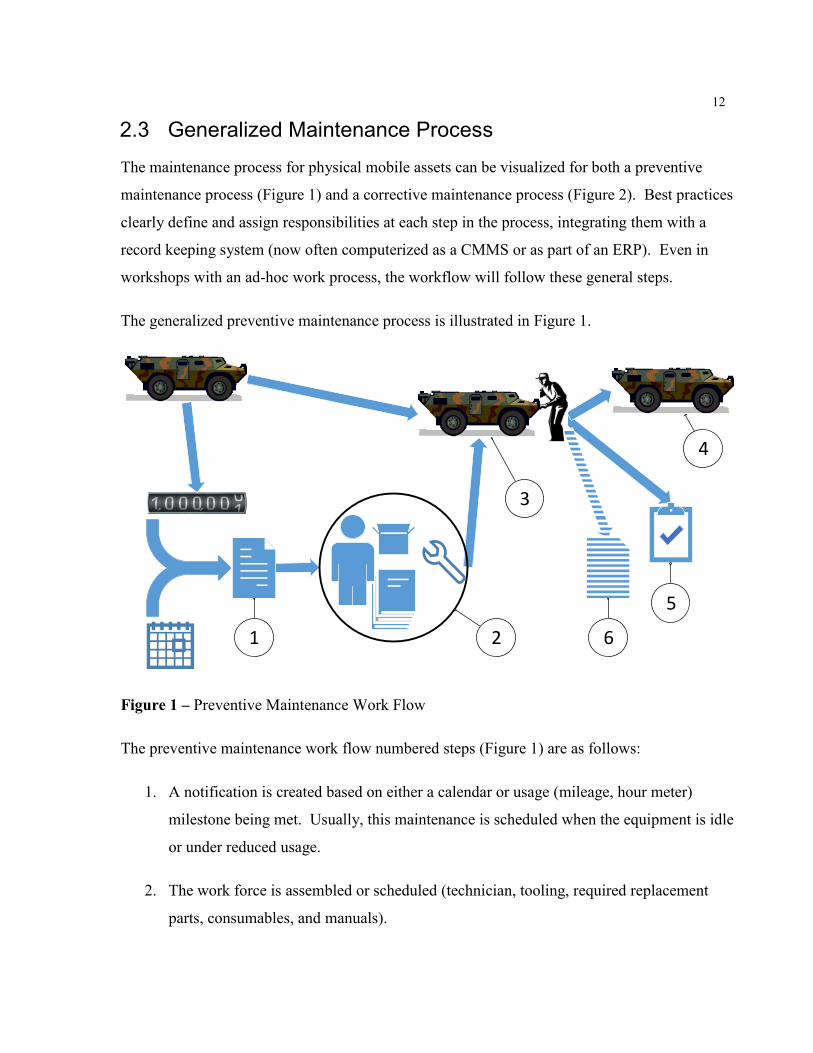
The generalized preventive maintenance process is illustrated in Figure 1.
1 2
3
4
6
5
Figure 1 – Preventive Maintenance Work Flow
The preventive maintenance work flow numbered steps (Figure 1) are as follows:
1. A notification is created based on either a calendar or usage (mileage, hour meter)
milestone being met. Usually, this maintenance is scheduled when the equipment is idle
or under reduced usage.
2. The work force is assembled or scheduled (technician, tooling, required replacement
parts, consumables, and manuals).
13
3. The work force and the equipment are brought together, either in the shop or in-situ (the
equipment’s location) based on the local situation.
4. Once the preventive maintenance is complete, the work order is finalized and filed.
5. The equipment is released to operation.
6. If the preventive maintenance has discovered corrective maintenance that cannot be
completed (due to timelines based on local policy), a corrective notification/work order
is created. Depending on the severity of the fault, the equipment can be released to
operation with no restrictions, released to operation with restrictions, or queued into
corrective maintenance.
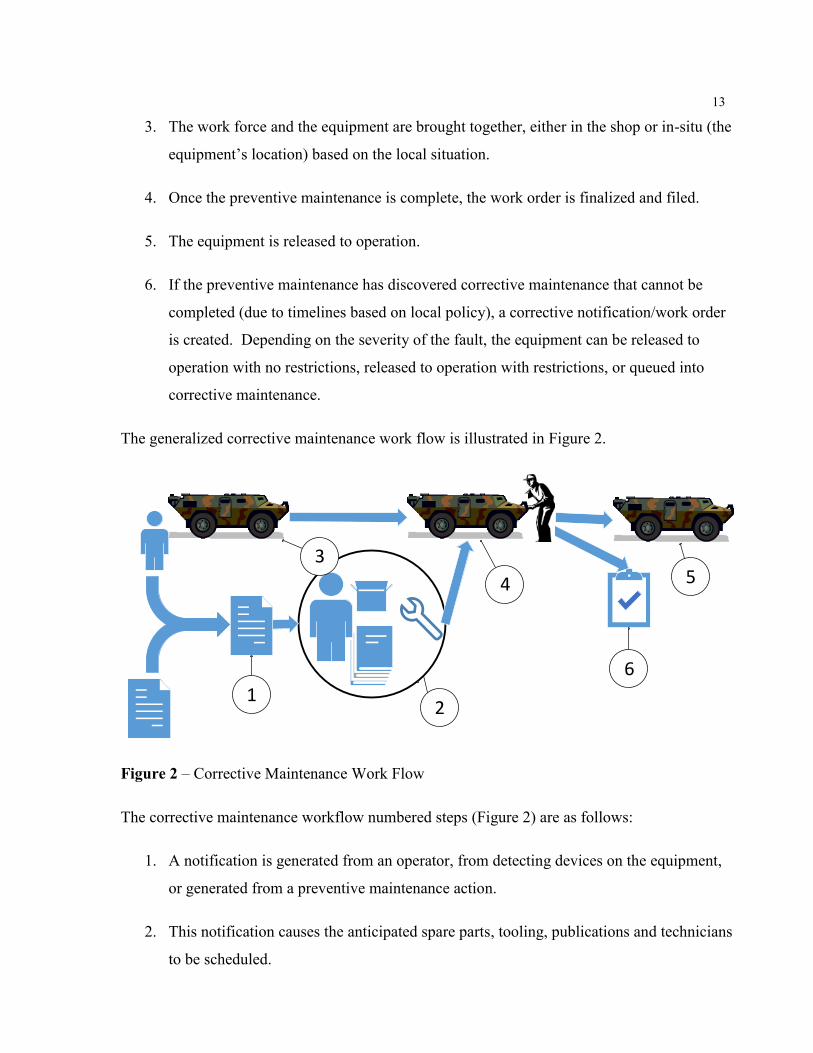
The generalized corrective maintenance work flow is illustrated in Figure 2.
12
3
4 5
6
Figure 2 – Corrective Maintenance Work Flow
The corrective maintenance workflow numbered steps (Figure 2) are as follows:
1. A notification is generated from an operator, from detecting devices on the equipment,
or generated from a preventive maintenance action.
2. This notification causes the anticipated spare parts, tooling, publications and technicians
to be scheduled.
14
3. The equipment is called in for maintenance action.
4. The maintenance action is performed using the assembled resources.
5. Once the maintenance action has finished, the equipment is released to service.
6. The work order is finalized and filed.
Modification processes are similar to corrective processes, with the original notification
generated from some type of engineering analysis. Ideally, the publications and replacement
parts will be assembled into a package and provided to the workshop conducting the work. In
certain circumstances, this package may also include external labour (in the case of a highly
technical or labour intensive modification).
2.4 Data Capture
The data are captured for the ERP system at multiple points in Figure 1 and Figure 2. While in
theory, this means the data can be checked at multiple points, in practice, there may be multiple
sources of error. Further, as there are multiple data entry points, the persons doing the data
entry can become complacent and skip the data entry on those points for which they neither
know the purpose nor receive any benefit for entering. Appendix A and Appendix B detail
where some of the data used in this study are sourced. For an ERP system, the linking of data
between modules (e.g. maintenance to finance) can become quite complex.
2.5 Preventive Maintenance
2.5.1 Definition
Preventive1 maintenance has various and sometimes conflicting definitions. The Canadian
Government’s official lexicon (Termium Plus®) says the following:
1 From the Merriam-Webster dictionary[5]:
Preventative adjective or noun, definition: Preventive.
It further says:
Preventive noun: something that prevents; especially : something used to prevent disease,
15
Maintenance intended to reduce the probability of failure or the degradation of a
functional unit [6] (taken from the Canadian Standards Association Information
Technology Vocabulary).
However, Termium Plus® also calls up a second reference:
NATO’s official definition is “Systematic and/or prescribed maintenance intended to
reduce the probability of failure” [7, p. 2–P–8].
Elsewhere, preventive maintenance is defined as:
Scheduled downtime, usually periodical, in which a well-defined set of tasks, such as
inspection and repair, replacement, cleaning, lubrication, adjustment, and alignment are
performed [8, p. 219].
Preventive maintenance or scheduled maintenance. Equipment is serviced and/or
components replaced at regular fixed intervals [9, p. 139].
Any action performed on equipment at periodic intervals with the aim of preventing
failure in service and retarding deterioration [10, Ch. GL–E–1].
Scheduled maintenance tasks performed before equipment failure to prevent it from
occurring [11, pp. 4–40].
Maintenance performed at predetermined intervals or according to prescribed criteria in
order to reduce the probability of failure or the degradation of the functioning of a
functional unit [12] [13].
The maintenance carried out at predetermined intervals or corresponding to prescribed
criteria and intended to reduce the probability of failure of the performance degradation
of an item [14].
The care and servicing by personnel for the purpose of maintaining equipment and
facilities in satisfactory operating condition by providing for systematic inspection,
detection, and correction of incipient failures either before they occur or before they
develop into major defects [15].
Simple or minor preservation operations and the replacement of small standard parts not
involving complex assembly operations [16].
Preventive adjective: : devoted to or concerned with prevention : precautionary <preventive steps against
soil erosion>: as
a : designed or serving to prevent the occurrence of disease <preventive medical care>
b : undertaken to forestall anticipated hostile action <a preventive coup>
16
2.5.2 Preventive Maintenance Themes
Several common themes are evident across these definitions. The first is a reduction in failures.
The second is periodicity, or a set time or interval in which maintenance is performed.
Therefore, to enact an effective Preventive Maintenance plan, those actions that will lessen the
risk of failure must be determined, and the correct or ideal interval must be selected.
Not included in the definitions is the goal of preventive maintenance. Several possibly
conflicting goals are evident: lowest possible operating costs, least possible downtime, and/or
greatest possible system availability, reliability, and/or availability of a group of systems. The
goal of the preventive maintenance program for the system must be in line with corporate goals
or expectations.
2.5.3 Industry Differences
What may be suitable for one industry may not be the preventive maintenance goal of another.
For example, a mining company may seek the least possible downtime of haul trucks when the
market for ore is high, and it may seek the lowest possible operating costs during normal
operation. If an industry has a high penalty for breakdown costs (i.e. unplanned idle time is very
expensive) it may seek the lowest operating cost tied to the least possible unplanned downtime.
Further, an industry with many standby systems (e.g. parallel safety systems) may seek a certain
percent reliability, such as a parallel pumping system that needs 5 of 7 pumps operating in order
to have an appropriate flow.
2.5.4 Lowest Operating Cost and Least Possible Downtime
Many of the definitions noted above refer to degradation of the unit and allude to downtime. To
understand the need for preventive maintenance, we must understand the effects of degradation,
downtime, and operating costs on the local situation. More specifically, these must be defined
with respect to the operating conditions in that situation or in that corporation.
2.5.4.1 Degradation
Worn items may have degraded performance. For example, dirty filters may restrict flow,
lengthening the production process and affecting the output and value per operating hour.
17
2.5.4.2 Downtime
When equipment is not functioning, there is a cost to the organization. If this downtime is due
to a failure or an unplanned shutdown, an elevated cost may be associated with multiple
components:
Idle staff drawing full wages
Penalties from customers due to missed deadlines
Infrastructure costs for heat/power
Lost opportunity costs (i.e. a smelter shut down when metal prices have peaked).
In contrast, planned shutdowns are often associated with reduced costs:
Work planned during times main production staff are not at facility (i.e. on weekends,
during planned shut-downs)
Work scheduled to meet customer deadlines
Infrastructure costs may be reduced as non-essential parts of the facility can be placed in
a low power state
Work planned for times when market values are favourable.
2.5.4.3 Operating Cost
Simply stated, the cost of operation is affected by many things, and cost may not be the same
over a period of time. Preventive maintenance must take this into consideration.
2.5.5 Refined Preventive Maintenance Statement
While the above definitions are useful, they all lack a “so what” type of statement. An effective
and clear definition of preventive maintenance needs to incorporate a goal statement. In other
words, preventive maintenance is intended to do or to accomplish “what”.
Ebeling provides a clear definition of preventative maintenance: “[It] is scheduled downtime,
usually periodical, in which a well-defined set of tasks, such as inspection and repair,
replacement, cleaning, lubrication, adjustment, and alignment are performed”[8, p. 219].
Adding an accomplishment statement such as “… in order to achieve the lowest possible
operating cost” or “… in order to achieve an X% system reliability” completes the definition
required in government or industry.
18
A clear definition of preventive maintenance is required for all members of an organization to
understand the requirements and goals. An unclear or incomplete definition can result in an ill-
defined preventive maintenance policy.
2.5.6 TLAV Preventive Maintenance Policy Review
Preventive maintenance for the TLAV is divided into various stages performed by different
persons. The first is the operator’s daily pre-use inspection, to be done prior to use. The second
is the operator’s periodic (or weekly) inspection, a more comprehensive inspection. The final is
the semi-annual preventive maintenance inspection and repair performed by the maintenance
technicians. This inspection occurs every six months unless the vehicle has been placed in a
state of long-term preservation.
Semi-annual inspections are typically the responsibility of first line organizations, but may be
performed by the third or fourth line if the equipment is being held as a strategic reserve stock.
The preventive maintenance instructions for the TLAV are contained in the maintenance
manuals as well as the vehicle inspection check list (known as the 1136 form) and the operator’s
instructions. The maintenance manual details the operator’s daily and weekly inspections as
well as the maintenance technician’s semi-annual inspections. The 1136 form is a generic
armoured vehicle inspection checklist guide. Additionally, a 50-point checklist has been
produced as an aide/guide for operators conducting daily inspections.
A detailed chart of these combined documents and an analysis of the inspection program is
included in Appendix E.
Although the maintenance and the process of conducting maintenance on the TLAV and other
fleets appears sound, until the data contained in the DRMIS ERP can be utilized to track the
performance of the TLAV under various conditions, there is no way to improve current
practices.
19
Chapter 3
Data Synthesis
3.1 The Information Pyramid
The collection and use of data can be represented by the Information Pyramid, also known as
the DIKW (Data-Information-Knowledge-Wisdom) Pyramid, as proposed by R.L. Ackoff[17]
(note: earlier versions of this model may also exist). Figure 3 shows the Pyramid.
Figure 3 – DIKW Pyramid
When a CMMS/ERP is being developed, the developers must understand how the data are going
to be used if they are to create methods to properly categorize the data. If the data are going to
be transformed to be used in corporate decision making as knowledge or wisdom, their
20
treatment will differ from that of data held for a short duration and not transferred up the
pyramid.
When data are being collected, the chief issue is how they will be used. Is it appropriate to
collect data for short term use and dispose of them, or must they be stored for future use? If the
latter is the case, many questions arise: for example, how are those data to be structured to allow
retrieval, and what items of data are to be captured?
If not enough data are captured, they may not be useful in the future, as key items may be
missing. But if too many data are captured, their organization and storage can become
problematic. All the data and more may be there, but the relevant data may not be immediately
discernible. Although there are various techniques to parse the data, if this is beyond the
capacity or capability of the organization holding the data, the organization is no better off than
if it held none.
Additionally, capturing more data, in this case maintenance data, requires either more sources
(automated reporting of sensors, mileage, etc.) or more data entry by human operators/
technicians or both. This may become costly in the form of infrastructure cost or the cost of
worker-hours spent entering data. Further, if there is a human involved in the capture or input
of the data, these data can be incorrectly entered, or if the task is long and laborious, it may be
neglected.
3.2 Sources of Data
Multiple data sources and repositories are often available, but organizing them to allow analysis
can be complex. Data sources may take the form of multiple computer record systems, paper
records, or even expert knowledge.
In the TLAV, data were available from: two separate maintenance logs, the original CMMS
(PLANN Expert) and the new ERP system (DRMIS). Data were also available in: Condition
Based Monitoring (CBM) (SOAP records database); a mileage tracking database (Fleet
Management System - FMS); maintenance publications; and a parts cataloguing database.
21
As the TLAV was brought into service before the DRMIS ERP was released for use, the vehicle
maintenance work orders existed in the CMMS but were closed out on the CMMS; the vehicles
transitioned to the ERP as it was rolled out by the Canadian Forces (on a location-by-location
ERP implementation). The transition to the ERP was not simultaneous for all vehicles at all
locations.
Although it did not exist in this case due to the relatively young age of the re-built vehicle
system, it is not uncommon to find paper copies of work orders. For example, a recent study of
replacement wooden electrical poles had this problem. As the poles had a lifetime exceeding 80
years, the full data were captured on both paper and electronic spreadsheets [18].
The database used in this study contains data on a lifetime of CBM. Unfortunately, as the data
were recorded and submitted by local technicians, the component specific identification
numbers were not properly recorded and the data could not be linked to a specific item of
equipment. When CBM data are properly organized they can be used to develop a PHM which
is based on internal (diagnostic) variables.[19] All of the elements of the SOAP analysis (i.e.
ppm of different metals) can be analyzed to determine which of these internal covariates are
reflective of the current state of the component.
Expert advice and tacit knowledge is often an untapped source of data. For the TLAV, such
data came from the project staff and technicians working on the vehicle. Updates to information
not captured in the publications were only available from experts, and this was used in the
characterization of the ERP/CMMS data.
3.3 The TLAV CMMS/ERP Dilemma
In the case of a CMMS or a maintenance module as part of an ERP, the immediate purpose of
the system may not be to capture data to convert them into wisdom, but to notify the appropriate
authorities that a repair or inspection is required and to facilitate the planning required to put the
failed equipment, parts, publications, and technicians (Figure 1 and Figure 2) into the right place
at the right time for repair. This may neglect some of the data required to fully define the failure
to allow the automated output of knowledge or wisdom, as the technicians are more concerned
with completing a repair than with characterizing the type of failure, its cause and effect.
22
This lack of data fitness (missing, improperly captured or structured data) is addressed in a
conference paper as part of a collaboration between the Centre for Maintenance Optimization
and Reliability Engineering (C-MORE) and the Faculty of Engineering, Computing and
Mathematics, University of Western Australia [20]. The paper addresses some of the issues
observed in the analysis of the CMMS and ERP data for the TLAV investigated in this thesis.
This failing in CMMS’ ability to process data was termed the “Black Hole” by Labib[21].
”Black hole” systems are “greedy for data input [but] seldom provide any output in terms of
decision support” [21, p. 192]. Labib adds:
Companies consume a significant amount of management and supervisory time
compiling, interpreting and analysing the data captured within the CMMS.
Companies then encounter difficulties analysing equipment performance trends
and their causes as a result of inconsistency in the form of the data captured and
the historical nature of certain elements of it. In short, companies tend to spend a
vast amount of capital in acquisition of off-the-shelf systems for data collection
and their added value to the business is questionable.[21, p. 192]
Unfortunately, this appears to be the problem with the data used in this study. The ability of the
CMMS to process day-to-day maintenance transactions is at odds with the ability to provide
integrated, seamless decision analysis.
The data accumulated in the CMMS and ERP used for this thesis seem to be concentrated or
focused on “getting the job done”. The data appear to be those required to get the parts ordered
and the vehicle into the shop to do the repair, and then close the work order to go on to the next
job. This concentration on conducting the repair and collecting data for the purpose of
conducting the immediate repair is evident and is a detriment to subsequent study and analysis.
Several key deficiencies are the result.
3.3.1 Lack of Failure Mode or Failure Cause
Failure modes are “the manner by which a failure is observed. Generally describes the way the
failure occurs and its impact on equipment operation”[22, Para. 3.1.14]. Examples of potential
failure modes include:
23
Corrosion
Hydrogen embrittlement
Electrical short
Fatigue
Deformation
Cracking [23]
A failure cause is “the physical or chemical process, design defects, quality defects, part
misapplication, or other process which are the basic reason for failure or which initiate the
physical process by which deterioration proceeds to failure” [22, Para. 3.1.12]. Examples of
potential failure causes include:
Improper torque applied
Improper operating conditions
Contamination
Improper alignment
Excessive loading
Excessive voltage[23]
A failure effect is “the consequence(s) a failure mode has on the operation, function, or status of
an item. Failure effects are classified as local effect, next higher level, and end effect”[22, Para.
3.1.13]. Examples of failure effects include:
Injury to the user
Inoperability of the product or process
Improper appearance of the product or process
Odours
Degraded performance
Noise[23]
The work orders (WOs) used by the fleet studied here did not capture these failure data, thus
limiting the possibility of further research and refinement of preventive maintenance actions.
The WOs did capture the occurrence of failure, but did not indicate why or how a failure
occurred.
24
Failure mode data could be captured in a field within the ERP data entry screen. The usefulness
of capturing these data must be weighed against the added processing time for the work order.
Further, as can be seen in the existing databases, if these fields are left for free-form data entry,
the number of possible responses (including abbreviations and misspelling) grows with
continued usage of the ERP. A further option is the use of a drop-down style list; however, this
can lead to data entry operators either choosing the first item on the list or selecting “unknown”
in order to proceed to the next step of the ERP process. This operator devaluing of the data can
be reduced by training and supervision, as well as ensuring the data entered can be manipulated
and improved and returned to the operator as either information or knowledge (a higher level on
the DIKW pyramid).
3.3.2 Lack of Clear Dates
The WOs all contained dates of return to service and hours in maintenance, but these dates do
not indicate when the item went into maintenance in all cases.
Some failures are hidden, and only express themselves when that system is selected for use;
these failures have a range of dates over which they may have failed. Further to this, poor
operator accountability means failures are not reported when they are noticed, as the operator
may want to use the system and may fear that reporting a failure could take the system out of
operation for maintenance. Operators may choose to continue using a failed/failing system,
further damaging other items in that vehicle, resulting in more extensive repair costs. For
example, an operator may identify a leaking turbo oil line but decide not to report it. This could
cause the turbocharger to become oil starved and fail, possibly damaging the engine. A $20
repair could quickly become a $20 000 repair.
3.3.3 Freeform Text
Data entered into several fields (WO Description, PM order_Description and Opr_short_ text)
were free form, user entry data. The information was inconsistent, prone to spelling errors, and
written in both French and English. The fields contained everything from detailed text
descriptions to text that simply said “repairs” (with no indication of what was repaired).
25
Further, the descriptions for some work orders differed from the work actually done. In several
cases, the description referred to repairs to one system on the vehicle, but the parts used
included components that could be installed on other systems/locations on the vehicle.
Furthermore, the descriptions could not capture opportunistic repairs done when the vehicle was
in the repair shop. Once the work order was created and described, any additional repairs
needed or found by the technician would not be included in the description.
3.3.4 Incomplete Component Identification
Key components are identified with a unique serial number, often marked on re-buildable
components such as engines and transmissions. If the location of each of these components is
known throughout their lifetime, their usage and status can be tracked. Further, bad actors can
be eliminated (i.e. those engines that even after rebuilding have shortened service lives, due to
undetected damage or re-manufacturing that has taken such items as cylinder walls outside of
specifications).
Unfortunately, the tracking of serial numbers was not implemented in the data provided, a key
reason why the SOAP database had become corrupt.
As well, several components on the vehicle lacked locational identification. The vehicle
contains many components with the same part number which can be used in multiple locations;
for example, the final drive can be used on either the right or left side, but the work order, in
many cases, did not denote which side was changed. The problem of parts used in multiple
locations extended to parts lacking serial numbers, such as road wheels, suspension arms,
shocks etc. It becomes difficult to tell if the same shock is being changed each time or if one of
the other shocks on the vehicle has failed and is being replaced.
3.3.5 Poor recording of usage data
This particular vehicle is equipped with an odometer, as well as an engine hour meter. The
engine hour meter information was not captured in the data. The vehicle mileage was captured,
but as this was a manual entry, the data were subject to corruption. Further, if an odometer was
repaired, or reset, subsequent mileage recordings did not necessarily capture this adjustment.
26
3.4 Remedies
Several solutions were implemented while cleaning the database for inclusion in the study. The
lack of failure mode data could not be overcome and was not the focus of this thesis. The
inclusion of failure mode data, if they existed, could help define “wisdom,” thus allowing the
analysis to define problem areas, leading to possible changes in system engineering. As it
stands, any engineering change would require extensive study and testing. The current data can
provide information on a troubled sub-system but lack the wisdom required to find a solution.
The lack of clear dates and mileages introduces a range of error for each of the failures, but in
light of possible security implications or perceived security implications, this error was allowed
to stand. If these data are to be cleaned for internal DND use, further operator training and
enforcement are required.
3.4.1 Component Identification
Component Identification was done manually, by comparing the NATO Stock Numbers (NSNs)
of the parts used in the repair with the parts manual that included descriptions and an exploded
parts diagram showing where the NSN was used on the vehicle. In most cases, this was enough
information to properly identify the part. For example, if the NSN was called a gasket, the
exploded parts view would show exactly which gasket and where it was used on the vehicle (i.e.
a gasket -> valve cover -> used on the engine). This identification allowed each line item in
each work order to be characterized using a coding system.
3.4.2 Work Order Coding
Each work order was coded, allowing all work orders to be easily grouped along various search
strings. As there may have been several repairs conducted or actions taken on each work order,
there may be several codings per work order. For example, if a work order was opened to
perform a repair on an engine, there could be a SOAP test, along with repair parts called up for a
sub-component turbocharger and a sub-component alternator. In coding the work order, all
three would be coded, as they served different purposes. Further, as previously mentioned, if
opportunistic maintenance occurred, e.g. repairs to the track, this was coded against the work
order where the parts were used.
27
Work Order Coding used four fields to describe the work to reach the level of fidelity required
for this study: Maintenance Type, Component, Sub-Component, and Action. This coding
allowed each work order line to be characterized with a seven digit code.
3.4.2.1 Maintenance Type – Maint_Type
The type of maintenance taking place was determined based on the description of the work and
the parts used, if any, to conduct a repair. These were categorized as shown in Table 1.
Table 1 – Maintenance Type Coding
Maint_
Type
Description Usage
C Corrective Repairs corrective in nature, repairs of parts, replacements of parts.
Most WOs using parts fell under Maint_Type Corrective. Database
records described as inspections but using repair parts were
categorized as corrective, as this relates to the failure of a
component.
I Inspection Inspection of equipment to determine its status. WOs described as
inspections in the comments field may have several database
records: one line without any repair parts called up would be coded
as Inspection, and the remaining lines calling up repair parts coded
as Corrective (that is, those faults found upon inspection).
M Modification Modifications are changes to the baseline system as directed by a
higher maintenance authority. Modifications were noted in the WO
description, and in the use of specific modification kits on several
modifications. Modifications affect the system by potentially
removing serviceable components to replace them with newer or
improved ones. Track modification is an example of this: existing
serviceable steel link tracks are replaced with a rubber continuous
band track to gain an operational and tactical advantage.
P Preventive Repair actions inherently preventive in nature include changing oil,
replacing engine belts etc.
X Exclude WOs noted as duplicate, cancelled or with sub components (nuts and
bolts) used on multiple components could not be uniquely identified
and were excluded.
3.4.2.2 Component – Comp
The coding “Comp” is a description of the major system affected by the Maintenance Type. On
a single work order, multiple components may have been affected, and all were captured with
the coding shown in Table 2.
28
Table 2 – Component Type Coding
Comp Component Description
CC Crew
Compartment
Components affecting the crew area (seats, stowage etc.)
CO Controls Operator controls
CS Communication
Systems
Radios and associated hardware, including antennae and
mounts
DL Driveline Engine driveline (shafts, universal joints)
EL Electrical Major vehicle electrical, not directly associated with another
component
EN Engine Vehicle engine and associated components
FD Final Drive Final drives transfer power from the drive shafts to the drive
sprocket that moves the track
FU Fuel Tanks, lines and pumps
HU Hull Vehicle hull, including bins, mounts and hatches
HY Hydraulics Lines, pumps, filters, cylinders
OT Optics Weapons sights and vision devices for the driver
PP Power Pack Engine and transmission when combined as a single
component
SU Suspension Shocks, support arms, idler arms
TK Track Originally a steel track, later the continuous rubber band track
TR Transmission Vehicle transmission
VE Vehicle Entire vehicle, typically used when denoting the semi-annual
inspection of the vehicle
WS Weapon System Any component associated with the weapon system, including
the turret or weapon station
XX Exclude WOs noted as duplicate, cancelled or with sub-components
(nuts and bolts) used on multiple components that could not
be uniquely identified and, thus, were excluded
3.4.2.3 Sub-Component – Sub_Comp
“Sub-Component” is a descriptor to further define the parts used to repair a component. Sub-
components do not uniquely identify an item; for example, a bolt could be used on different
components. In order to define an item, each data entry must be read as follows: Component
first, then Sub-Component (i.e. FUFI = Fuel Filter, HYFI = Hydraulics Filter). The Sub-
Component codes are listed in Table 3.
29
Table 3 – Sub-Component Type Coding
Sub Sub-Component Usage (Component Higher Assembly)
00 None Not Required, or entire competent changed; thus, no sub-
components used
AF Air Filter Engine
AL Alternator Engine
AO Add On Armour Hull
BE Belt Engine, Crew Compartment (Seat Belts)
BI Bin Crew Compartment, Hull, Weapon System
BO Bolt Multiple
BR Brakes Transmission, Control, Crew Compartment
BT Battery Electrical
CA Cable Communication System, Electrical, Weapon System
CO Cover Multiple
DS Drive Shaft Drive Line
EL Electrical Engine, Weapon System
EX Exhaust Engine, Crew Compartment
FA Fan Engine, Crew Compartment
FI Filter Engine, Hydraulic, Fuel, Transmission
FL Fuel Lines Fuel, Engine
FP Fuel Pump Fuel, Engine (high pressure pump)
FR Fire Suppression Hull, Electrical
GU Gauge Control, Electrical
HA Hatch Hull
HE Heater Engine, Crew Compartment
HR Horn Control, Hull
IA Idler Arm Suspension
IW Idler Wheel Suspension
LF LEFT Track, Final Drive
LI Light Hull, Crew Compartment, Weapon System, Electrical
MI Mirror Hull
MO Mount Communication System, Engine, Hull
OP Oil System Engine, Transmission
PA Pad Track
PL Plug Hull, Engine
30
Sub Sub-Component Usage (Component Higher Assembly)
PT Plate Hull
PU Pump Engine, Hydraulic
RA Radiator Engine
RE Receptacle Electrical, Weapon System
RR Ramp Rear Hull
RT RIGHT Track, Final Drive
RW Road Wheel Suspension
SA Support Arms Suspension
SC Super-Charger Engine
SE Seat Crew Compartment
SF Shaft Multiple
SH Shock absorber Suspension
SI Sighting Systems Weapon systems
SK Sprocket Drive line, Engine
SN Sensor Multiple
SP Speedometer Control, Transmission
SR Steering Control, Crew Compartment
ST Starter Electrical, Engine
SW Switch Multiple
TA Tank/Reservoir Fuel, Hydraulic
TB Torsion Bar Suspension
TC Turbo-Charger Engine
TE Tensioner Engine, Suspension
TU Tubes / Hoses Multiple
UK Unknown Sub-components (nuts and bolts) used on multiple components
that could not be uniquely identified
VT Valve Train Engine
WI Windshield Hull
XX Exclude WOs noted as duplicate, cancelled or unable to be characterized
were excluded
3.4.2.4 Action – Maint_Action
“Action” describes what the technician did on a particular data entry. These are listed in Table 4.
31
Table 4 – Maintenance Action Coding
Action Description Usage
00 Inspection Inspection of an item without repair
AD Adjust Physical adjustment, no parts used
FL Change fluids Oil or other fluid change
IN Install Install a new item, no removal of an old item (e.g. install Add-
on-Armour)
LU Lube Lubrication
PR Preservation Placing an item in long term storage, cleaning an item, or
removing moisture
RC Recovery Extraction of a stuck vehicle
RE Replacement Removal of a component and installation of a new component
RM Remove Removal of a component without re-installation (e.g. removal of
Add-on-Armour)
RP Repair Fixing an item without replacement (e.g.. tightening loose
mounting bolts)
SC Sub-Component
Replacement
Replacement of a sub-component or sub-sub-compoenent that is
not traceable.
SO SOAP Test Spectrometric Oil Analysis Program fluid sampling
UK Unknown Insufficient details to characterize the action
VM Vehicle
Movement
Inspections completed, sending or receiving a vehicle from
another location
XX Exclude WOs noted as duplicate, cancelled or unable to be characterized
were excluded
3.4.2.5 Coding Steps
The work order coding was a manual multiple step process:
1. Data lines with no parts usage and a description referencing inspection were coded
(typically with an I code).
2. Data lines with no parts usage were analyzed to determine the proper coding.
3. Data lines with a description of a modification were coded (typically with an M code).
32
4. Parts used on a data line were analyzed; each part number was set against an exploded
parts view to confirm where it was used on the vehicle and whether it was coded
appropriately.
Because the parts had to be looked up and visually confirmed against the exploded parts
diagram, it was not possible to fully automate the coding process. Considerable programming
would be required to have an automated system look up a part number and interpret an exploded
parts view. The lookup process might be simplified if the parts database were fully
characterized into parts dependencies.
Information that was not available or could not be characterized (blank lines, inconsistent data)
was coded with an X or XX. If it could be determined that a corrective action happened in the
crew compartment, but no other information was available, it was coded C-CC-XX-XX.
An example of the CMMS and ERP data sets available for the study and the subsequent coding
can be found in the appendices (Appendix D– CMMS Database Sample and Appendix E– ERP
Database Sample)
3.4.2.6 Data Codes
A vehicle inspection is coded as I-VE-00-00, while the replacement of a turbo-charger gasket is
C-EN-TC-SC. This allows quick searching of number of repairs to specific systems, or to focus
analysis on a particular type of maintenance, system or sub-system.
Although this detail is sufficient for this thesis, to fully define the location of every sub-
component down to the location of every nut and bolt would require several more levels of
definition and would need to be captured during the initial collection of the data. It is possible
to have coding capturing the location of the front left washer that secures the driver’s seat to the
floor, but this need to be weighed against the time taken to enter the data and the possible
introduction of errors if there is to be an advantage in moving the DIWK pyramid.
33
3.4.3 Vehicle Usage Calculation
Although it is a data field in the CMMS and ERP, usage data (accumulated kilometres) was not
consistently or properly captured for the fleet. Several error types were discovered during data
analysis:
1. Data were not entered – Null entry field
2. Re-set odometer settings were not captured – Decrease in odometer readings
3. Use of the same odometer readings over several maintenance periods – Data used from
the previous work order vs being read from the vehicle
4. Erroneous entries – Vehicle license plate or vehicle type identifier entered in field
5. Quick/rough data entry – Rounded values being entered, i.e., 900 vs 898 or 888 vs a
precise amount
Augmenting the usage data captured in the CMMS/ERP were separate odometer readings
captured in a transportation log (FMS). This system is, in theory, updated monthly by entering
the km accumulated in that month. Thus, by knowing the most current reading and subtracting
the monthly accumulated distance readings, the odometer reading in a particular month can be
determined. Unfortunately, typically for each vehicle, a large error accumulated as the
odometer reading went back to the beginning of the vehicle’s life. This accumulated error could
stem from several additional errors:
1. Double entries
2. Large corrections – Data entered, then accumulated and re-entered showing a large
single month increase
3. Not accounting for odometer resets
4. Data transcription errors
5. Inability to correct previous erroneous entries
34
Because these vehicles did not receive homogenous usage over time or across platforms, the use
of accumulated calendar time would not provide an adequate description of the state of the
vehicle. Therefore, usage data are required for even the most basic analysis of the status of the
system. To achieve an acceptable level of clarity, a manual analysis of all available usage data
was compiled as follows:
1. The vehicle was assumed to have 0 km at the beginning of life.
2. The FMS data over the life of the vehicle were plotted on a monthly basis.
3. This was compared to the sparse usage data from the CMMS and ERP.
4. For each vehicle, the data were adjusted up or down to pass through the 0 km origin and
the majority of the CMMS/ERP data points. The increase in month by month usage
came from FMS. Thus, erroneous data quickly became visible and could be addressed
or deleted.
These corrected data could be used to determine the km reading in the month the equipment
failed or an event (inspection, modification) took place. This was confirmed in the EXAKT
program by looking at the life history plots for the vehicles (see Chapter 5, Figure 4).
3.5 DIKW Conclusions
As seen in the actions taken to “clean” or categorize the data collected in the CMMS/ERP, it is
possible to take data “sitting” at the bottom of the pyramid and move them up the pyramid to
better data/information, but this process is laborious and requires considerable manual input
from an individual who is well-versed in both the equipment being analysed and the culture of
the organization entering the original data.
The easiest solution to the retroactive data categorization problem is to develop and enforce a
coding system at the time of work order creation. Through the use of smart drop-down tables,
technicians can be presented with a tailored series of options to characterize the repair they are
doing. These smart drop-down tables would aim not to overwhelm the technician with options,
allowing for subsequent accurate and precise analysis of the data.
35
Chapter 4
Operating Condition Effects
4.1 Vehicle Usage
Vehicle usage in a military context can vary greatly from other industries. The military vehicles
are often moved between locations for varying durations to perform training or on missions. A
vehicle may experience hot and dusty conditions one year before being moved to a different
mission in a cold/wet environment under a different mission profile (task profile).
Many other managers of large fleets experience vehicle usage patterns that are more suitable to
a stable homogeneous analysis. For example, mining haul trucks tend to operate in a particular
mine for their entire lifetime under nearly continual usage. Transit buses in a city operate under
fairly consistent conditions with minor cyclical variations for the seasons.
The use of covariates was investigated extensively by Ghodrati when applied to mining
vehicles; however, these conditions were site specific as the subject vehicles passed their entire
life in the same geographic location, performing the same task [24-27]. Covariates were used
by Barabadi when investigating seasonal changes to equipment (oil and gas platforms and
electrical meters) in a fixed location [28], [29]. Furuly (with Barabadi) studied operating
environments (winter to summer) in the Svea coal mine in Norway[30]. However, these studies
did not have the opportunity to investigate equipment moved between various environments.
Military vehicles are ideal for this sort of study; they are exposed to a wide range of operating
conditions and usage intensities. A vehicle may sit for long durations waiting to be sent on a
mission; while on the mission, it may see extremely high usage. In addition, military vehicles,
especially in Canada, can experience a wide range of environmental conditions, from cold to
extreme heat while on a mission. However, little work in the analysis of moving military
vehicles between environmental conditions is available. Wong in her Master’s Thesis looked at
SOAP covariates for the British Warrior armoured vehicle, and proposed in future work to look
at temperature conditions and their effect in a single training location[31].
36
In light of this, a covariate model was needed to address the possible differing conditions faced
by the vehicle and to determine if the generic model could be improved.
4.2 Environmental Conditions
Four general environmental conditions define the conditions faced by this fleet (TLAV FOV):
Cold, Hot, Wet, and Dusty.
Other environmental conditions could be faced by the vehicle fleets, including extreme cold, salt
spray etc.; however, during the period of study, these vehicles did not encounter such
conditions.
In order to study the conditions faced by the vehicles, a system of quantifying the trending
environmental condition in each geographic area had to be developed. The environmental data
from each of the relevant locations over 2001-2013 were acquired (primarily Environment
Canada data). These data showed monthly averages, maximums and minimums; however,
using this type of data quickly became cumbersome.
The use of established baselines was selected as a suitable approximation. NATO’s Allied
Environmental Conditions and Test Publication, AECTP-230 [32], maps out the environmental
trends experienced in every geographic location globally. AECTP-230 was developed to allow
test and project engineers to prepare test specifications for specific climatic effects. AECTP-
230 uses 11 categories found at the land surfaces of the world, and a further three to describe sea
conditions. Test conditions are unusually specified by selecting a condition from the high
temperature category (A1, A2, or A3) and the low temperature category (C0, C1,C2, C3, or C4),
as well as the high humidity category (B1, B2, or B3 if required), based on geographic location
where the equipment will be employed.
As AECTP-230 characterizes the world’s surface temperature conditions, it was chosen as the
basis for the covariate development. The AECPT-230 categories are summarized in Table 5
[32, p. 141].
37
Table 5 – AECPT-230 Summarized Temperature and Humidity Cycles World Wide
Category Meteorological
Temperature (oC) Relative Humidity (%)
Hot (Arid conditions)
A1 32 to 49 8 to 3
A2 30 to 44 44 to 14
A3 28 to 39 78 to 43
Humid
B1 (Jungle)
7 days at 24 100
358 days at 23 to 32 88 to 66
B2 (Savanah) 26 to 35 100 to 74
B3 (Persian Gulf) 31 to 41 88 to 59
Cold
C0 -6 to -19
Tending
to
saturation
C1 -21 to -32
C2 -37 to -46
C3 -51
C4 -57
Maritime
M1 29 to 48 67 to 21
M2 25.5 to 35 100 to 53
M3 -23 to -34 Tending to saturation
4.2.1 Cold
Each location for which the vehicle was used was assigned a score in accordance with the
AECTP-230 cold map (Plate 2). Scores were assigned in a binary fashion. If it met the
condition C0 (mild cold), C1 (intermediate cold), C2 (Cold), C3 (Severe Cold), or C4 (Extreme
Cold), it was assigned a score of 1; otherwise, it was scored 0.
38
Plate 2 – Climatic Categories Map: Cold [32]
The vehicles in this study experienced conditions of C0, C1, and C2, based on geographic
location (confirmed by comparing the Environment Canada norms in each target location to
Table 5). As these vehicles did not operate in C3, or C4, no scoring was performed, and these
values were discarded. If there was a data set with C3 and C4 exposure, based on future
operating conditions, those data would have to be captured and analyzed later.
4.2.2 Hot
Each location for which the vehicle was used was also assigned a score in accordance with the
AECTP-230 Hot map (Plate 3). Scores were given a binary assignment of 1 or 0 if they were in
those conditions (A1 (Extreme Hot Dry), A2 (Hot Dry), A3 (Intermediate)).
39
Plate 3 – Climatic Categories Map: Hot [32]
The vehicles in this study experienced conditions of A3 and A2/A1, based on geographic
location (confirmed by comparing the Environment Canada norms in each target location to
Table 5). One geographic location on deployed operations was on a boundary between the A2
and A1 conditions. As there were no comparison points, and the vehicles in Canada were all at
the A3 condition, to simplify computations, the scoring was modified to either Hot or Not Hot,
scoring a 1 or 0 respectively. If in the future, these vehicles are employed in a geographic
location that can define the difference between A1 and A2, further study will be required.
40
4.2.3 Hot–Humid
The final map used in AECTP-230 defines hot and humid areas (e.g. rainforests and jungles)
(Plate 4). As these vehicles did not operate in any of these conditions, it was not possible to
define the effect on failure, and Hot-Humid was not included as a covariate.
Plate 4 – Climatic Categories Map: Hot–Humid [32]
4.3 Geographic Conditions
Certain conditions create additional strain on vehicles. In this case, bogging was a key
condition that required modeling. Bogging refers to conditions that could cause a vehicle to
become stuck, including wet/muddy ground, soft sandy soil and steep inclines. One location in
Canada met those conditions, as did the deployed location, and they were assigned a score of 1;
otherwise, they were scored 0.
41
4.4 Operating Conditions
Operating conditions influence the serviceability of the vehicles and were defined by three
categories: Operator Experience, Idling Time, and Add-on-Armour.
4.4.1 Operator Experience
These vehicles are used on military operations, on training for missions, on general training and
as training aides for new operators. Because of this, the operator experience level can vary
greatly, placing additional strain on the vehicle. An experienced operator knows how the
vehicle is supposed to perform and can spot small problems before they become damaging.
Locations with experienced operators were scored 1; otherwise, they were scored 0.
4.4.2 Idling Time
Certain locations use the vehicles as training aides, and the vehicles see a high degree of usage,
but low accumulated km. As the engine hour meter readings were not captured, the Idling Time
covariate was created to capture this effect; these locations were scored 1; otherwise, they were
scored 0.
4.4.3 Add-on-Armour
On operations, the vehicles are fitted with an additional armour package. This provides added
protection to the vehicle and crew, but increases the vehicle weight, placing an added strain on
the drive train and suspension. Vehicles with AoA installed were scored 1; otherwise, they were
scored 0.
4.5 Additional Future Conditions
Several other conditions were examined, but there was no way to distinguish them from the
conditions chosen as covariates.
4.5.1 Wet or Dusty
This designation was to be used for locations receiving little moisture. Equipment used in
Canada was assigned a score of 0, while deployed equipment was scored 1. However, this
scoring was identical to the scoring for whether a vehicle had AOA installed, and it was not
42
possible to characterize how dusty a condition may have been at a particular time for the
vehicle.
4.5.2 Extreme Cold
As these conditions were not experienced, they could not be included.
4.5.3 Stagnation
How long a vehicle sits without use likely affects the serviceability of the vehicle platform, as
the system experiences a certain continual degradation due to exposure to the elements. This
exposure leads to corrosion of metals and degradation of rubber gaskets and seals, which can
eventually lead to failure. Unfortunately, from the data available, it was not possible to
characterize stagnation as a covariate based on geographic location.
4.5.4 Rocks/Unprepared Surfaces
Sharp rocks can flatten the tires of wheeled vehicles and damage the suspension and track
components of tracked vehicles; however, in this case there was neither sufficient definition of
rocky areas nor significant differences from other covariates.
4.5.5 Storage
Improperly stored spare parts face various degrees of degradation depending on the types and
harshness of the conditions to which they are exposed [33]. Vehicles left parked and exposed to
the environment also face these deterioration effects. In the initial design, various scores were
to be given based on storage/parking conditions: 0=outside un-covered, 1=outside covered with
a tarp, 2=under a shed/roof, 3=inside a building, 4=in a climate controlled (humidity and
temperature) space. Although the geographic location where the vehicles were stored could be
determined, however, this gave no indication of the specific storage conditions.
4.5.6 Mountainous Terrain
Mountainous terrain causes additional strain on the engine and braking system and can
potentially lead to failure. Unfortunately, there was insufficient mountainous terrain in the
locations where the vehicle was used to be able to include this in the study.
43
4.5.7 Maritime Environment
As exposure to salt spray causes corrosion, an analysis of this condition would be beneficial, but
during the data period, these vehicles were not used in a coastal zone.
4.5.8 General Condition Covariate Summary
Table 6 summarizes the list of environmental/conditions covariates, their coding, and the
scoring mechanism.
Table 6 – Covariate Selection Chart
Condition
Group
Code Condition
Title
Score
Cold
C0 mild cold Score 1 condition; other conditions
score 0 C1 intermediate cold
C2 cold
C3 severe cold
C4 extreme cold
Hot
A1 extreme hot-dry Score 1 condition; other conditions
score 0 A2 hot dry
A3 intermediate
Humid
B1 wet warm Score 1 condition; other conditions
score 0 B2 wet hot
B3 humid hot costal desert
Operator
opexp experienced operator 1 with experience, otherwise 0
Idling
idle equipment idling without
accumulating distance data (if no
hour meter in use)
1 for locations with higher instance
of idling, otherwise 0
Bogging
bog mud, sand or deep snow bogging conditions score 1,
otherwise 0
Armour
AoA add on armour installed 1 for installed armour, otherwise 0
Dust
dust dusty operating conditions 1 for dusty locations, otherwise 0
Stagnation
stag vehicles that tend to sit for
extended periods between usage
1 for locations with equipment
parked/stationary for extended
44
Condition
Group
Code Condition
Title
Score
(if not clearly indicated in the
actual usage data)
periods between usage
Surface
SF0 paved Score 1 the most prominent
operating condition; other
conditions score 0 SF1 gravel
SF2 sharp rocks
Storage
S0 outside un-covered Score 1 condition; other conditions
score 0 S1 outside with tarp
S2 under a roof
S3 inside a building
S4 inside a climate controlled space
Mountain
Mt0 0-500m Score 1 the most prominent
operating condition; other
conditions score 0 Mt1 501-1000m
Mt2 1001-1500m
Mt3 1501-2000m
Mt4 2001 and over
Maritime
M1 hot maritime (salt exposure) Score 1 the most prominent
operating condition; other
conditions score 0 M2 warm maritime (salt exposure)
M3 cold maritime (salt exposure)
4.6 Condition Covariates
Based on the scoring discussed above, the following initial covariate chart was developed (Table
7). Each of the locations A, B, C, D, E, F corresponds to a location or several locations (if those
locations had the same total scores) where the vehicles were in service. (Place names are
intentionally suppressed.)
45
Table 7 – Environmental Effects
Location Cold 0 Cold 1 Hot Dust Bog
Operator
Experience Idling AoA
c0 c1 hs dust bog opexp idle aoa
A 0 1 0 0 0 1 0 0
B 0 0 0 0 0 1 0 0
C 0 1 0 0 1 0 0 0
D 0 1 0 0 0 1 1 0
E 0 1 0 0 0 1 0 0
F 1 0 1 1 1 1 0 1
Given the locations where this vehicle system was used over its lifetime, Cold 0, Hot, AoA and
Dust have direct dependency and are redundant. As no further details could be determined with
the data set used in this study, they were combined into a single covariate (AoA) representing all
redundant conditions.
4.7 SOAP Analysis
Although SOAP data are often the basis for the covariates for a proportional hazards model
analysis [31], the SOAP data for the TLAV–M113 data set were corrupt and unrecoverable.
Therefore, the integration of SOAP covariates was not pursued.
46
Chapter 5
Proportional Hazards Model Development
The proportional hazards model (developed by Cox[34]; see further work by Banjevic[19])
provides a mechanism to model covariates which may have an influence on the hazard function.
5.1 EXAKT
The developed covariates were run through the condition based maintenance optimization
software called EXAKT (version 4.2).
EXAKT takes processed signals, correlates them with past failure and potential
failure events. Using modeling, it subsequently provides failure risk and residual
life estimates tuned to the economic considerations and the availability
requirements for that asset in its current operating context.[35, p. 125]
The use of EXAKT to calculate geographic influences is not part of the intended design;
however, when covariates are carefully selected, EXAKT meets this extended purpose.
5.2 Data Input
Normally, EXAKT takes readings at each inspection time as inputs for the covariates. These
readings usually take the form of observations from a CBM program (e.g. parts per million
(ppm) of iron (Fe) or copper (Cu) in the oil samples or vibration readings at each inspection
point). For example, a prominent oil analysis laboratory offers 3 levels of SOAP, with the first
level returning readings on 30 contamination, wear and oil condition items, and the highest level
returning over 57 readings[36], [37]. EXAKT solves the proportional hazards model for the
system based on all CBM observations; then, through a process of elimination, the solution is
reduced to those covariates that are significant to the model (as described by Wong [31], [38]).
For this thesis, the environmental covariates were entered as inspection readings based on the
geographic location where the vehicle was located when the inspection was performed (location
where the vehicle was held). Further, for each repair point or equipment suspension point, a
dummy inspection was created based on the vehicle location at the point of repair. This method
47
allowed the establishment of the vehicle’s life history, showing when it entered into service,
each inspection point and any component replacements.
EXAKT requires the data from the ERP/CMMS to be structured into two main spreadsheets that
it uses for its calculations. The first is the “Events” sheet (EXAKT M113 transmission Events
table excerpt at Appendix D) and the second is the “Inspection” sheet (EXAKT M113
transmission Inspection table excerpt at Appendix G).
EXAKT needs to know when the equipment went into service (“B” – Beginning) as well as each
inspection time (“I” – Inspection) and the results of the inspection (covariate
values/measurements). Each failure (“EF” – Equipment Failure) and removal before failure
(“ES” – Equipment Suspension) must be entered with the date and accumulated working age (in
this case kilometres accumulated on the odometer). Additionally, after each EF and ES
occurrence, the replacement component starts its life and thus has a Beginning, in this case
noted as BEF and BES respectively. To allow EXAKT to know where the vehicle was at all
points in time, dummy inspections were created after the initial beginning when the vehicle
went into service “D”, as well as EF and ES occurrences (DEF and DES respectively). These
dummy inspections were treated the same as any other inspection; in the case of these
covariates, it ensured the covariates were applied continually over the life of the vehicle despite
some vehicles changing operating locations during their history.
The final step to ensure the EXAKT data input was appropriately structured was the addition of
a time element to each of the date entries. As multiple events (I, EF, BEF, DEF) could happen
on the same day, the order of the events required a higher level of fidelity; this was
accomplished by giving a time to each event which was then applied to each day that particular
event occurred. This ordering forced a precedence hierarchy on all possible event combinations
(Table 8).
48
Table 8 – Event Precedence
Order
Event /
Inspection Name
Time
(24 hour clock)
1 B Beginning 12:00
2 D Dummy Inspection to initially place vehicle 12:01
3 I Inspection 13:00
4 DEF Dummy Inspection to place vehicle prior to EF 15:00
5 EF Equipment Failure 15:30
6 BEF Beginning after EF 15:45
7 DES Dummy Inspection to place vehicle prior to EF 16:00
8 ES Equipment Suspension 16:30
9 BES Beginning after ES 16:45
The resulting data could then be represented graphically for transmission replacements, as
shown in Figure 4, for each of the vehicles.
Figure 4 – Example EXAKT Equipment Component Life History
49
5.3 EXAKT Simple Weibull Model
Using the life history of the equipment and of both the Equipment Failures (EF) and Equipment
Suspensions (ES), EXAKT calculates the probability density function for the Weibull [35] as
follows:
( )
(
)
( )
( )
Equation 1
where:
β = Shape parameter,
η = Scale parameter (characteristic life),
γ = Location parameter.
It also calculates the hazard rate h(t) [35]:
( ) ( )
(
)
( ) ( )
Equation 2
This can be expressed as the cumulative distribution function F(t) as follows [35]:
( ) ( )
Equation 3
Further, the Reliability Function R(t) can be derived from a known hazard rate [8]:
( ) ∫ ( )
Equation 4
In addition, EXAKT calculates the mean life µ[35, p. 241][39] using the following function:
50
(
)
Equation 5
where Γ is the Gamma function:
( ) ∫
Equation 6
and the Median Life (B50 life) [39] is:
( )
Equation 7
EXAKT calculates the standard deviation σ given as [35, p. 241]:
√[ (
) (
)]
Equation 8
EXAKT uses these calculations to create an output chart of the equipment being investigated, as
shown in Table 9.
51
Table 9 – EXAKT Output Definitions
Parameter Scale Shape Mean Life Median Life Characteristic
Life
Standard
Deviation
η β μ B50 life η σ
Weibull
shape
parameter
[10,
Table 4.1]
Average time units
in the population
are expected to
operate before
failure. This metric
is often called
"mean time to
failure" (MTTF) or
"mean time before
failure" (MTBF)
[40]
Life
corresponding
to 50%
mortality
Time at which
63.2% of the
units will have
failed [41]
Table 10 shows the Weibull shape parameter [8, Fig. Table 4.1].
Table 10 – Weibull Shape Parameter
Value Property
0< β <1 Decreasing Failure Rate (DFR)
β = 1 Exponential Distribution, Constant Failure Rate (CFR)
1< β <2 Increasing Failure Rate (IFR), concave
β = 2 Rayleigh Distribution
5.3.1 EXAKT Proportional Hazards Model
Once the covariates are entered, EXAKT seeks to estimate the PHM using Equation 9 [35, p.
119]:
( )
(
)
∑ ( )
Equation 9
where z1, z2, …, zm are the covariates and γ1, γ2, …, γm are the covariates calculated in EXAKT.
The output from EXAKT takes the form of a chart as shown in Table 11.
52
Table 11 – EXAKT Covariate Output
Parameter Scale Sign
(*)
Std
Error
Wald DF p-Value Exp of
Estimate
95%CI
Lower Upper
Scale - - - -
Shape -
γn
Where:
Sign (*), p-value: For every covariate parameter γi included in the model, the hypothesis that γi
= 0 is tested, i.e. that this covariate is not significant for the model. If the p-value is small (<
5%-10%), the hypothesis that γi = 0 cannot be accepted, i.e. we can assume this covariate is
significant and should be included in the model. If the p-value is > 5%, but not too large (say
10%-15%), different models with or without this covariate can be examined [42, Sec. 10.2.3].
DF: Degree of Freedom
Standard Error: The standard error of an estimate shows the precision of an estimate. Larger
standard errors mean less precise estimates. The standard error depends on the sample size
(number of histories) and how important covariates or age are to failure [42, Sec. 10.5].
WALD: The Wald Test is used to check various hypotheses of interest about the parameters.
The test checks whether the difference between an assumed and estimated parameter value is
significant or not, reporting an appropriate p-value. If the p-value is small (e.g. less than 5%-
10%), the assumed value can be rejected (statistically).[42, Sec. 10.2.3] The Wald test is used to
check the hypothesis that the shape parameter β = 1 (as well as the hypothesis that γi = 0). If the
reported p-value is small ( ≤ 5%-10%), it can be accepted that β ≠ 1.[42, Sec. 10.5]
Exp Estimate: Exponent of the estimate, that is
95%CI: 95% Confidence Interval
53
5.4 Data Processing: Moving Up the DIKW Pyramid
5.4.1 Data to Information
As the databases had been characterized with coding, the information now contained was easy
to manipulate into structures that could be inputted into EXAKT. Multiple scenarios could be
run, or different components could be analyzed. The once raw data were “pushed” up the
DIKW pyramid.
5.4.2 Transmissions
The transmission was selected for full analysis as it has few sub-components that are replaceable
at the workshop level. Failures, for the most part, result in the transmission being removed and
sent for rebuilding. Therefore, it should generate the cleanest data set.
5.4.2.1 Failure History
The EXAKT fleet history showed not all vehicles had experienced a transmission failure and
several had experienced multiple failures. Further, several transmissions were replaced with 0
accumulated kilometres since the previous installation (no usage before replacement). These
failures were investigated further:
One suspension was part of a power-pack replacement. The transmission was originally
replaced as faulty, and it appears that on re-assembly, the engine was found to have
failed. This recently replaced transmission was removed when the entire power-pack
assembly (engine and transmission) was replaced. This extra work and steps could have
been the result of poor initial diagnosis or damage resulting from the initial maintenance
action.
Several transmissions were replaced soon after installation; a physical investigation
would be required to determine if a replacement was the result of installation errors,
shelf-life degradation and storage condition of the spare component or poor quality
control at the rebuild facility. As these transmissions had accumulated zero kilometres,
the EXAKT solver treated them correctly as a single event and removed the extra
replacement from the solution.
54
If the processed data could allow the managing authority to flag early failures for investigation,
the cause of said failures could be eliminated. However, retroactively addressing these sorts of
failures is not possible.
5.4.2.2 Component Life
As the data were now structured, EXAKT was able to generate the Weibull Distribution shown
in Table 12.
Table 12 – Transmission Weibull Distribution
Parameter Scale Shape Mean Life
(km)
Med Life
(km)
Char Life
(km)
Std Dev
(km)
Estimate 11526.1 1.231 (*) 10773.1 8558.63 11526.1 8797.7
Std. Error 1194 0.1172 - - - -
(*) Based on Wald test observed value = 3.89213, p-value = 0.0485129, and 5%
significance level, the hypothesis that the Shape parameter = 1 is not accepted.
This result shows support for the shape parameter being greater than 1 and establishes the
MTTF and Characteristic Life for the component. Thus, the resulting hazard function can be
written as:
( )
(
)
Equation 10
The characteristic life of the transmission is 11526.1 km, with a MTTF of 10773.1 km.
5.4.2.3 Locational Covariates
Before the environmental covariates were applied, a trial was run to see the effect of each
physical location on the fleet. Vehicles that were in a location of interest were scored 1;
otherwise, they were scored 0.
55
Table 13 – Location Covariates
Covariate Locations - Score
1 2 3 4 5 6 7 8 9 10
Location 1 1 0 0 0 0 0 0 0 0 0
Location 2 0 1 0 0 0 0 0 0 0 0
Location 3 0 0 1 0 0 0 0 0 0 0
Location 4 0 0 0 1 0 0 0 0 0 0
Location 5 0 0 0 0 1 0 0 0 0 0
Location 6 0 0 0 0 0 1 0 0 0 0
Location 7 0 0 0 0 0 0 1 0 0 0
Location 8 0 0 0 0 0 0 0 1 0 0
Location 9 0 0 0 0 0 0 0 0 1 0
Location 10 0 0 0 0 0 0 0 0 0 1
To see how the transmission was affected by each geographic location, the covariates in Table
13 were applied in accordance with the data input method detailed in section 5.2. The results of
the proportional hazards model for transmissions by location appear in Table 14.
Table 14 – Transmission Locational Covariates
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 7.933e+5 - 40.32 - - - 7.932e+5 7.933e+5
Shape 1.272 N 8.521 0.001021 0.9745 - 0 17.56
Location 1 5.136 N 3.83 1.79 0.1809 170 -2.387 12.66
Location 2 6.164 Y 1.932 10.18 0.00142 475.1 2.377 9.95
Location 3 -11.34 Y 0.0199 3.248e+5 0 1.189e-5 -11.38 -11.3
Location 4 5.876 Y 1.793 10.75 0.001046 356.4 2.363 9.389
Location 5 -13.04 Y 0.01478 7.781e+5 0 2.172e-6 -13.07 -13.01
Location 6 3.88 Y 1 15.05 1.045e-4 48.41 1.92 5.84
Location 7 -9.851 Y 0.01324 5.54e+5 0 5.267e-5 -9.877 -9.826
Location 8 -6.994 Y 0.0249 7.89e+4 0 0.0009174 -7.043 -6.945
Location 9 5.045 Y 0.03478 2.104e+4 0 155.3 4.977 5.113
Location 10 -6.156 Y 1 37.89 0 0.002122 -8.116 -4.196
The results in Table 14 show a significant possibility that the shape parameter is 1, as the
corresponding p-value is significant (0.9745). Likewise, the covariate for Location 1 also
exhibits a high p-value and, thus, likely is not significant to the proportional hazards model.
In order to develop the corresponding PHM, it was necessary to remove the covariate with the
highest p-value (in this case Location 1) and re-run the EXAKT solver, resulting in Table 15.
56
Table 15 – Transmission Locational Covariates – first reduction step
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 1.401e+4 - 3781 - - - 6596 2.142e+4
Shape 1.272 Y 0.1176 5.362 0.02058 - 1.042 1.503
Location 2 1.028 N 0.7898 1.693 0.1932 2.794 -0.5204 2.575
Location 3 -17.84 N 115.8 0.02372 0.8776 1.782e-8 -244.9 209.2
Location 4 0.74 Y 0.3639 4.136 0.04197 2.096 0.02685 1.453
Location 5 -17.48 N 80.33 0.04733 0.8278 2.571e-8 -174.9 140
Location 6 3.829 N 1.47e+10 6.791e-20 1 46.04 -2.88e+10 2.88e+10
Location 7 -15.7 N 127.7 0.01512 0.9021 1.518e-7 -266 234.6
Location 8 -11.01 N 42.76 0.06634 0.7967 1.646e-5 -94.83 72.8
Location 9 -0.09131 N 0.8691 0.01104 0.9163 0.9127 -1.795 1.612
Location 10 -10.8 N 58.01 0.03468 0.8523 2.034e-5 -124.5 102.9
This process of eliminating the covariate with the highest p-value was continued iteration by
iteration until only significant covariates remained. (The step-by-step reductions are at
Appendix H). When reduced, the transmissions for this particular fleet of vehicles have the
significant covariates shown in Table 16
Table 16 – Transmission Locational Covariates – Reduced
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 2.322e+4 - 5978 - - - 1.15e+4 3.494e+4
Shape 1.285 Y 0.1151 6.114 0.01341 - 1.059 1.51
Location 2 1.685 Y 0.7776 4.693 0.03029 5.39 0.1604 3.209
Location 3 1.379 Y 0.34 16.45 0 3.972 0.7128 2.046
Thus, the PHM for the transmission reduces to the following equation:
( )
(
)
( ) ( )
Equation 11
where Location 2 and 3 are significant, and have a detrimental impact on the hazard function of
the transmission. Further, as the transmission has a shape parameter greater than 1, it is
showing degradation with time (wear out), an increasing failure rate in accordance with Table
10.
57
Further, if the solution is calculated with a single covariate at a time, each of the locations can
be compared individually to the others to determine if it has a detrimental effect on the hazard.
If:
then location j has an increased hazard compared to NOT being in that location. If:
then location j has a decreased hazard compared NOT being in that location. If:
then location j is “no better or worse” than NOT being in the other locations or there is
insufficient evidence to support the value of γlocation j being a value other than 0. This provides a
quick method to locate those locations detrimental to the particular component being
investigated (in this case the transmission). The aggregate table, Table 17, shows the EXAKT
solutions for the PHM observing a single covariate.
Table 17 – Transmission Individual Location Analysis
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 9437 - 937.6 - - - 7599 1.127e+4
Shape 1.267 Y 0.1123 5.663 0.01733 - 1.047 1.488
Location 1 -0.771 Y 0.3892 3.924 0.04761 0.4625 -1.534 -0.00811
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 1.053e+4 - 1008 - - - 8558 1.251e+4
Shape 1.257 Y 0.1131 5.161 0.02309 - 1.035 1.479
Location 2 0.6526 N 0.7224 0.8162 0.3663 1.921 -0.7632 2.069
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 9952 - 940.2 - - - 8110 1.18e+4
Shape 1.241 Y 0.1122 4.619 0.03162 - 1.021 1.461
Location 3 -16.33 N 61.19 0.07124 0.7895 8.074e-8 -136.3 103.6
58
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 2.086e+4 - 4931 - - - 1.12e+4 3.053e+4
Shape 1.279 Y 0.115 5.884 0.01528 - 1.054 1.504
Location 4 1.235 Y 0.316 15.27 0 3.438 0.6154 1.854
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 9732 - 908.8 - - - 7950 1.151e+4
Shape 1.254 Y 0.1168 4.737 0.02952 - 1.025 1.483
Location 5 -16.48 N 47.32 0.1213 0.7276 6.963e-8 -109.2 76.27
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 1.043e+4 - 2.055 - - - 1.043e+4 1.043e+4
Shape 1.254 N 8.847 0.000825 0.9771 - 0 18.59
Location 6 0.3828 N 1 0.1465 0.7019 1.466 -1.577 2.343
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 1.027e+4 - 969.4 - - - 8369 1.217e+4
Shape 1.251 Y 0.113 4.941 0.02622 - 1.03 1.472
Location 7 -18.19 N 184.5 0.009712 0.9215 1.264e-8 -379.9 343.5
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 1.018e+4 - 949.4 - - - 8322 1.204e+4
Shape 1.268 Y 0.114 5.523 0.01877 - 1.044 1.491
Location 8 -12.96 N 56.07 0.05346 0.8171 2.341e-006 -122.9 96.93
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 1.015e+4 - 970 - - - 8250 1.205e+4
Shape 1.259 Y 0.1134 5.202 0.02256 - 1.036 1.481
Location 9 -0.889 N 0.8464 1.103 0.2935 0.4111 -2.548 0.7699
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 1.014e+4 - 942.8 - - - 8291 1.199e+4
Shape 1.27 Y 0.1138 5.643 0.01753 - 1.047 1.493
Location 10 -14.86 N 53.09 0.07828 0.7796 3.536e-7 -118.9 89.21
Several of the locations show a location covariate that is significant: Location 1 at -0.771, and
Location 4 at 1.235. Thus, something about Location 1 reduces the hazard to the vehicle, and
something about Location 4 raises the hazard to the vehicle. This could potentially be due to
Location 1 having a large dedicated team of maintenance technicians, combined with operators
who are more focused on conducting their operator inspections, and vehicles that are not
59
allowed to sit and deteriorate unused. This could be contrasted to Location 4 where the vehicles
are used as training aides (taken apart and re-assembled in training or used as recovery training
vehicles), where damage can occur to the vehicles. Further, the vehicles at Location 4 tend to sit
stagnant for longer periods.
5.4.2.4 Environmental/Usage Conditions Covariates
The covariates developed in Chapter 4 were applied to the EXAKT model generated in 5.4.2.2.
With all covariates applied, EXAKT produced the results shown in Table 18.
Table 18 – Transmission Environmental Covariates Model
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI Lower Upper
Scale 0.003851 - 0.1006 - - - 0 0.201
Shape 1.269 Y 0.1225 4.837 0.02786 - 1.029 1.51
aoa -0.424 N 1.022 0.1721 0.6783 0.6544 -2.427 1.579
bog -1.828 N 1.455 1.579 0.2089 0.1607 -4.679 1.023
c1 -16.67 N 33.22 0.2518 0.6158 5.777e-8 -81.77 48.44
idle 17.66 N 33.24 0.2824 0.5952 4.686e+7 -47.49 82.81
opexp -19.35 N 33.2 0.3398 0.5599 3.934e-9 -84.42 45.72
From Table 18, it can be seen that although the shape parameter is significant with a p-value less
than 0.05, all covariates have a significant p-value and, thus, likely approach 0.
5.4.2.5 Transmission Model Simplification
Is there a simpler sub-model that is a close approximation of the model with all 5 covariates?
There are 5 sub-models with 4 covariates, 10 with 3 covariates, 10 with 2 covariates and 5 with
1 covariate. It is possible that one of these sub-models with less covariates exhibits significant
values while also having less complexity and adequately approximating the complete covariate
solution.
A model can be compared with its sub-model through hypothesis testing. EXAKT compares
one model to its sub-set model, resulting in a p-Value (probability) based on the Null
Hypothesis that the model with more covariates is not better than the reduced model. The high
60
p-value supports the Null Hypothesis and, thus, supports that the simpler model can replace the
more complex one.
EXAKT creates the likelihood function (L) [43] given the input data of failures and suspensions:
( ) ∏ ( )
∏ ( )
Equation 12
where q is the number of failures, m is the total number of endings (failures and suspensions),
and Θn is the parameters making up the function such that:
{ }
Equation 13
h(xi, Θ n) is the hazard function for each failure time, and R(yj, Θ n) is the reliability function at
each ending (suspension and failure time) (yj). EXAKT finds the maximum of the likelihood
function.
It is possible to compare two sets of covariates to see if a sub-model is a good approximation for
a more complex model. Where Θreduced is Θn with some of the γi parameters removed, the
difference in number of parameters between Θn and Θreduced is the Degree of Freedom (DF).
The sample value [44, Sec. 10.3.1]
( ( )
( ))
Equation 14
is calculated, where ( ( )
( )) is what EXAKT calls the Deviance Change[42, Sec.
10.2.5] and the p-value is calculated from the resulting χ² distribution. Note: “If the p-value for
some sub-model is small (e.g. < 5%-10%), then this sub-model can be considered as a sub-
model not good enough to replace the basic one. If two non-basic sub-models are compared,
then the one with the higher p-value can be considered as the one that better represents the data”
[42, Sec. 10.2.5]. Models can only be compared with their sub-models. Further, the fit of the
61
likelihood of a larger model (more covariates) ≥ fit of the likelihood of a sub-model (fewer
covariates). Given this, if a model is reduced to a sub-model and is not a good fit (p_value is
low), there is no need to investigate the fit of a sub-sub-model.
EXAKT also generated Table 19, comparing the base model Θall covariates with all possible sub-
models Θ4 covariates (also showing the new β, η, and, γi values).
62
Table 19 – Transmission Sub-models Step 1
Sub -model Close to base Deviance Change Probability Parameter Estimate
Base (all) 0 1
Scale 0.003851
Shape 1.269
aoa -0.424
Bog -1.828
idle 17.66
opexp -19.35
c1 -16.67
aoa
bog
idle
opexp
N 4.0082 0.0453
Scale 1500
Shape 1.275
bog -2.165
aoa 0.5849
idle 1.988
opexp -4.092
aoa
bog
c1
opexp
N 6.99176 0.00819
Scale 1679
Shape 1.252
opexp -3.221
bog -2.03
aoa -0.09699
c1 0.04584
bog
c1
idle
opexp
Y 0.164146 0.685
Scale 0.002438
Shape 1.274
bog -1.817
idle 18.62
opexp -20.35
c1 -17.32
aoa
bog
c1
idle
N 16.6483 0
Scale 3.064e+4
Shape 1.288
bog 0.2763
aoa -0.2933
c1 1.338
idle 0.1114
aoa
c1
idle
opexp
Y 2.04697 0.153
Scale 0.09736 Shape 1.292
idle 15.75
opexp -15.92
c1 -14.66
aoa -0.2798
Table 19 shows only two sub-models that may approximate the full model. These were selected
to see if their sub-sub-models approximate them. Covariates {bog, c1, idle, opexp} are
developed in Table 20 and covariates {aoa, c1, idle, opexp} are developed in Table 21.
63
Table 20 – Transmission Sub-models Step 2a
Θ4
bog
c1
idle
opexp
vs Base
(all)
Deviance Change (DC) = 0.164146
p_value (p_v) = 0.685
Θ3 bog
c1
idle
bog
c1
opexp
bog
idle
opexp
c1
idle
opexp
vs Θ4 DC = 16.59
p_v = 0
DC = 6.835
p_v = 0.00894
DC = 4.18575
p_v = 0.0408
DC = 1.98117
p_v = 0.159
Θ2 c1
idle
idle
bog
c1
bog
c1
bog
bog
opexp
c1
opexp
bog
opexp
bog
idle
idle
opexp
idle
opexp
c1
idle
c1
opexp
vs Θ2 X X X X X X X X X Table
20a
Table
20a
Table
20a
Table 20a
Θ2 idle
opexp
c1
idle
c1
opexp
vs Θ3 DC = 5.35622
p_v = 0.0206
DC = 14.7943
p_v = 0.00012
DC = 7.70271
p_v = 0.00551
Θ1 idle opexp c1 idle c1 opexp
vs Θ2 X X X X X X
As Table 20 shows, only one 3-covariate sub-model {c1, idle, opexp} approximates the more
complex {bog, c1, idle, opexp} model, and none of the 2-covariate sub-models approximates
{c1, idle, opexp}.
Table 21 analyzes covariates {aoa, c1, idle, opexp} to determine if they reduce to a simpler
model than that shown in Table 20.
64
Table 21 – Transmission Sub-models Step 2b
Θ4
aoa
c1
idle
opexp
vs Base
(all)
Deviance Change (DC) = 2.04697
p_value (p_v) = 0.153
Θ3 aoa
c1
idle
aoa
c1
opexp
aoa
idle
opexp
c1
idle
opexp
vs Θ4 DC = 14.797
p_v = 0.00012
DC = 7.783
p_v = 0.00528
DC = 5.15546
p_v = 0.0232
DC = 0.0983521
p_v = 0.754
Θ2 c1
idle
idle
bog
c1
bog
c1
bog
bog
opexp
c1
opexp
bog
opexp
bog
idle
idle
opexp
idle
opexp
c1
idle
c1
opexp
vs Θ2 X X X X X X X X X Table
21a
Table
21a
Table
21a
Table 21a
Θ2 idle
opexp
c1
idle
c1
opexp
vs Θ3 DC = 5.35622
p_v = 0.0206
DC = 14.7943
p_v = 0.00012
DC = 7.70271
p_v = 0.00551
Θ1 idle opexp c1 idle c1 opexp
vs Θ2 X X X X X X
Likewise, analyzing Table 21 for 3-covariates, only {c1, idle, opexp} approximates {aoa, c1,
idle, opexp}; again, the 2-covariate sub-models do not approximate {c1, idle, opexp}.
Thus, using only the covariates {c1, idle, opexp}, EXAKT can generate a new model, as shown
in Table 22.
Table 22 – Transmission Three Covariate Sub-model
Parameter Estimate Standard Error Wald p_value
Scale 0.00395 2708 - -
Shape 1.296 8.3 0.001273 0.972
c1 -18.86 3.197 34.8 0
idle 20.08 1.708 138.1 0
opexp -20.33 1 413.1 0
65
Given the p_value of 0.972, there is a high probability that the Shape parameter β=1, but the
model can be written as:
( )
(
)
( ) ( ) ( )
Equation 15
5.4.3 Engines
As the data were now structured, the life of the engine could be compared to the transmission
component life data.
5.4.3.1 Component Life
Table 23 – Engine Weibull Distribution
Parameter Scale Shape Mean Life
(km)
Med Life
(km)
Char Life
(km)
Std Dev
(km)
Estimate 8443.6 0.9693 (*) 8560.23 5785.08 8443.6 8832.7
Std. Error 874.8 0.07777 - - - -
(*) Based on Wald test observed value =0.155949, p-value = 0.692914, and 5%
significance level
This shows strong support for the shape parameter being 1. If EXAKT fixes the shape
parameter to 1, Table 24 can be derived.
Table 24 – Engine, shape parameter = 1
Parameter Scale Shape Mean Life
(km)
Med Life
(km)
Char Life
(km)
Std Dev
(km)
Estimate 8389.94 1(fixed) 8389.94 5815.46 8389.94 8389.9
Std. Error 830.8 - - - - -
Thus, the characteristic life of the engine is 8389.94 km, with a MTTF of 8389.94 km, which is
shorter than the characteristic life of the transmission.
66
5.4.3.2 Environmental/Usage Conditions Covariates
The same environmental covariates used for the transmission were applied to the engine,
generating Table 25.
Table 25 – Engine Environmental Covariate Model
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI Lower Upper
Scale 316.1 - 461 - - - 0 1220
Shape 0.9363 N 0.07849 0.6597 0.4167 - 0.7824 1.09
aoa -1.62 Y 0.6807 5.665 0.01731 0.1979 -2.954 -0.2859
bog -0.3358 N 0.7738 0.1883 0.6643 0.7148 -1.853 1.181
c1 -2.39 Y 0.9741 6.018 0.01416 0.09166 -4.299 -0.4804
idle -11.58 N 33.35 0.1206 0.7284 9.346e-6 -76.95 53.78
opexp -2.366 Y 0.9941 5.663 0.01733 0.09389 -4.314 -0.4173
Using the principles developed in 5.4.2.4, Table 26 was analyzed for possible viable sub-
models.
67
Table 26 – Engine Sub-model Step 1
Sub -model Close to base Deviance Change Probability Parameter Estimate
Base (all) 0 1
Scale 260.4 Shape 0.9356 c1 -2.558 bog -0.3468 opexp -2.533 idle -12.31 aoa -1.626
aoa
bog
c1
idle
N 10.8656 0.00098
Scale 1.178e+4 Shape 0.9467 c1 -0.5056 bog 1.104 idle -15.84 aoa -0.7233
aoa
bog
c1
opexp
Y 2.13484 0.144
Scale 121.6 Shape 0.9431
c1 -3.11
bog -0.5409
aoa -1.831
opexp -3.11
aoa
bog
idle
opexp
N 10.0725 0.00151
Scale 5958 Shape 0.9317
bog 0.02686
aoa -0.5968
opexp -0.6984
idle -16.78
aoa
c1
idle
opexp
Y 0.196891 0.657
Scale 407.1
Shape 0.9381
aoa -1.424
opexp -2.33
idle -12.16
c1 -2.493
bog
c1
idle
opexp
N 5.01328 0.0252
Scale 2155 Shape 0.9368
opexp -1.867
idle -15.24
c1 -1.876
bog 0.9498
The table shows that only two sub-models may approximate the full 5-covariate model.
Therefore, covariates {aoa, bog, c1, opexp} are investigated in Table 27 and {aoa, c1, idle,
opexp} are investigated in Table 28.
68
Table 27 – Engine Sub-models Step 2a
Θ4
aoa
bog
c1
opexp
vs Base
(all)
Deviance Change (DC) = 2.13484
p_value (p_v) = 0.144
Θ3 aoa
bog
c1
bog
c1
opexp
aoa
bog
opexp
aoa
c1
opexp
vs Θ4 DC = 18.624
p_v = 0
DC = 17.241
p_v = 0
DC = 7.9059
p_v = 0.00493
DC = 0.53868
p_v = 0.463
Θ2 aoa
bog
aoa
c1
bog
c1
bog
c1
bog
opexp
c1
opexp
aoa
bog
aoa
opexp
bog
opexp
aoa
c1
aoa
opexp
c1
opexp
vs Θ2 X X X X X X X X X Table
27a
Table
27a
Table
27a
Table 27a
Θ2 aoa
c1
aoa
opexp
c1
opexp
vs Θ3 DC = 22.5533
p_v = 0
DC = 17.1844
p_v = 0
DC = 8.98137
p_v = 0.00273
Θ1 aoa c1 aoa opexp c1 opexp
vs Θ2 X X X X X X
Table 27 shows only one 3-covariate sub-model {aoa, c1, opexp} approximates the more
complex {aoa, bog, c1, opexp} model, and none of the 2-covariate sub-models approximates
{aoa, c1, opexp}.
Table 28 analyses covariates {aoa, c1, idle, opexp} to determine if they reduce to a simpler
model than that shown in Table 27.
69
Table 28 – Engine Sub-models Step 2b
Θ4
aoa
c1
idle
opexp
vs Base
(all)
Deviance Change (DC) = 0.196891
p_value (p_v) = 0.657
Θ3 c1
idle
opexp
aoa
c1
idle
aoa
idle
opexp
aoa
c1
opexp
vs Θ4 DC = 7.05664
p_v = 0.0079
DC = 14.838
p_v = 0.000117
DC = 9.87873
p_v = 0.00167
DC = 2.47663
p_v = 0.116
Θ2 c1
idle
c1
opexp
idle
opexp
c1
aoa
aoa
c1
aoa
opexp
c1
opexp
vs Θ2 X X X X X X X X X Table
28a
Table
28a
Table
28a
Table 28a
Θ2 aoa
c1
aoa
opexp
c1
opexp
vs Θ3 DC = 22.5533
p_v = 0
DC = 17.1844
p_v = 0
DC = 8.98137
p_v = 0.00273
Θ1 aoa c1 aoa opexp c1 opexp
vs Θ2 X X X X X X
As before, when analyzing Table 28 for 3-covariates, only {aoa, c1, opexp} approximate {aoa,
c1, idle, opexp}, and again, the 2-covariate sub-models do not approximate {aoa, c1, opexp}.
Thus, using only the covariates {aoa, c1, opexp}, EXAKT can generate a new model, as shown
in Table 29.
70
Table 29 – Engine Three Covariate Sub-model
Parameter Estimate Standard Error Wald p_value
Scale 229.6 237.1
Shape 0.949 0.07831 0.4243 0.515
aoa -1.55 0.5123 9.154 0.002481
c1 -3.072 0.9288 10.94 0.00094
opexp -2.836 0.8789 10.41 0.001253
Given the p_value of 0.515, there is a high probability that the shape parameter β=1, but the
model can be written as:
( )
(
)
( ) ( ) ( )
Equation 16
5.4.4 Suspension Systems
To test the data selection and processing on a dataset with more failures, a simplified (no-
covariates) example was run for the suspension system. Unlike the transmission that is changed
as a unit, or the engine that can either be changed as a unit or repaired, the suspension system is
made of many small sub-components that are replaced as needed. These include: shocks,
bushing, torsion bars, idler arms, mounts, suspension arms etc.
5.4.4.1 Component Life
Selecting the SU components from the structured data, EXAKT was able to process the Weibull
distribution displayed in Table 30.
Table 30 – Weibull Distribution
Parameter Scale Shape Mean Life
(km)
Med Life
(km)
Char Life
(km)
Std Dev
(km)
Estimate 1656.23 0.8164 (*) 1850.09 1057.17 1656.23 2281.7
Std. Error 98.11 0.03002 - - - -
(*) Based on Wald test observed value = 37.4093, p-value = 0, and 5% significance level
71
This shows strong support for a shape parameter that is less than 1, meaning the system is
improving with time and has a higher probability of surviving the next time period, than it did
surviving the last time period. The resulting hazard function can be written as:
( )
(
)
Equation 17
Thus, the characteristic life of the of the suspension system as a whole is 1656.23 km, with a
MTTF of 1850.09 km. As multiple sub-components were replaced, the characteristic life of the
suspension was 1656.23 km before a repair was required.
5.4.4.2 Environmental/Usage Conditions Covariates
Suspension systems were not selected as candidates for further analysis, as it is believed the
improving condition of the suspension is due to the effect of the track on the hazard of the
suspension system. During the life of this vehicle fleet, the track was changed from a steel link
track to a continuous band rubber track. Operators reported a smoother ride, with less vibration
and jarring. The improved ride conditions for the operator also appear to have positively
affected the suspension system.
As the data did not show the timing of the track upgrade for each vehicle, the running time with
each suspension system was not known; developing a covariate model for the suspension would
likely depend on the type of track.
It is also doubtful that the rubber track will continue to show such a low shape parameter effect
on the suspension system, but when looked at on the macro level, the suspension system is
improving with time.
5.5 Summary Table
As the characterized data are relatively easy to manipulate, they can be quickly tailored for a
program like EXAKT. These accumulated data are finally able to produce Knowledge, and can
be summarized in a hazard function, shown in table form below.
72
Table 31 – Summary of Hazard Functions for the M113
Parameter Scale Sign (*) Std Error Wald p-Value
Scale 0.00395 - 2708 - -
Shape 1.296 N 8.3 0.001273 0.972
c1 -18.86 Y 3.197 34.8 0
idle 20.08 Y 1.708 138.1 0
opexp -20.33 Y 1 413.1 0
Parameter Scale Sign (*) Std Error Wald p-Value
Scale 229.6 - 237.1
Shape 0.949 N 0.07831 0.4243 0.515
aoa -1.55 Y 0.5123 9.154 0.002481
c1 -3.072 Y 0.9288 10.94 0.00094
opexp -2.836 Y 0.8789 10.41 0.001253
Parameter Scale Sign (*) Std Error Wald p-Value
Scale 1656.23
Shape .8164 Y 37.4093 0
5.6 Information to Knowledge
Although the engine and transmission are interconnected and subject to many of the same
stresses and forces, something in the environment affects their hazard rate differently.
From Equation 15, it seems temperatures of intermediate cold are less harmful to the
transmission (than extreme cold and hot), being in locations where they idle is more damaging,
and having experienced operators improves the system.
Comparatively, the factors affecting the engine are different from those affecting the
transmission. From Equation 16, the engine actually does better when faced with the deployed
location conditions (noted as AoA, but also several other factors; see para 4.5). Like the
transmission, the engine does better in intermediate cold temperature conditions and having
experienced operators improves the system. The relative impact of operator experience is
greater for the transmission.
73
Additionally, the data now support the effects of the improved rubber band track on the hazard
rate of the suspension system. Changing to the rubber track has caused the suspension system to
improve with time.
Finally, the shape parameter of both the transmission and engine is close to 1. That is, failures
are constant (or approaching a constant). As the constant failure rate model has a
memorylessness property[8, p. 47] (its continued survival is not contingent on its current
survival duration), there is no reason to preventively change an engine or transmission after a
fixed period of time. More careful collection of data (precise collection of mileage and date
data) may establish a more exact shape parameter.
5.7 Data to Wisdom
Now that Information and Knowledge have been developed from the original raw data, is it
possible to refine the information even further into Wisdom?
5.7.1 General Formulation
Although the programming for this integration would have to be tailored to each specific ERP
program, it is possible to calculate the expected number of failures and, thus, project the number
of spare parts required.
When calculating the number of spares required in a single location (i.e. missions are in one
location, not moving between locations with different covariate conditions), the covariates can
be represented by a constant C, so we can let ∑ ( ) ; thus, the hazard function becomes:
( )
(
)
∑ ( )
(
)
Equation 18
As the hazard rate of a Weibull distribution can be re-written as:
( )
(
)
Equation 19
74
and:
(
)
then:
Equation 20
Calculating the mean a Weibull distribution[35] becomes:
( ) (
)
(
)
Equation 21
where Γ(1+1/β) is the gamma function of (1+1/β).
Likewise, the standard deviation can be calculated using the form of the standard deviation
formula[35]:
√ (
) (
)
Equation 22
75
5.7.2 Software Integration
With this results for E(T)=MTTF and the standard deviation, the number of required spare parts
for a given duration (or planned number of km for the number of vehicles to be used) can be
calculated in a variety of existing software platforms. For example, SMS [45], a spares
optimization software developed at the University of Toronto could be used to project the
number of required spare parts for a mission of a given duration.
SMS requires the number of systems in use, the MTBR, which given a short repair period to a
large Time To Failure, can be approximated by the MTTF, as well as the standard deviation.
With these, a selected reliability level, and the planning horizon, SMS can project the number of
required spare parts.
Thus, when a new mission profile is selected, the military planner could select from a list of
covariates those conditions which best match the new mission location. This, along with a
planning horizon (duration of mission, repair duration, time to replenish stock), would allow a
tailored calculation of spares requirements for a specific location, even if the vehicles had not
previously been deployed or tested in that location.
5.7.2.1 Transmission Spare Parts Requirement Example
If mission planners want to calculate the spares requirement for a new mission they could select
the appropriate covariates for that location, the number of vehicles to be deployed, the required
reliability and the planning horizon (in number of km per vehicle for the duration of the
mission). The following table provides a sample solution using SMS.
76
Table 32 – Spare Parts Calculation Example
Covariates and Variables Selected by Planner
Item Example
Value
c1 1 Input for transmission PHM
idle 1 Input for transmission PHM
opexp 1 Input for transmission PHM
Number of Vehicles on Mission 20 Input and used by SMS – based on planned need or
operational commitment
Required Reliability 98% Used by SMS – based on value selected by mission
planner
Planning Horizon 2500 km Used by SMS – based on the projected number of km
to be driven by each vehicle, as selected based on
operational forecast
Values Calculated from EXAKT PHM solution
E(T) 9246 km Calculated from Equation 21 (based on selected
covariates)
Std Deviation 8152 km Calculated from Equation 22 (based on selected
covariates)
SMS Solution (output)
Required Number of Spares 12 SMS solution
Thus, using a program such as SMS, a spare parts solution can be tailored and calculated for a
planned deployment, using a combination of conditions yet to be faced. In the example in Table
32 for our hypothetical mission, we can determine that 12 spares are required to support the fleet
in a combination of conditions not encountered by the vehicle in its usage/deployments to date.
77
Chapter 6
Conclusion
6.1 Results
As seen in Chapter 5, it is possible to develop proportional hazards models for components
based on environmental conditions at various geographic locations. Further, the models are not
the same for every component. The environmental conditions that affect one system (i.e.
transmission) affect another system differently (i.e. suspension). Because the combination of
covariates and their influence on a component system depend on that component, there is no
global covariate model that can be applied to each component.
6.2 Data
As the covariates are not universal for all components, model development would need to be run
for each component studied, but once the data are structured, this is relatively easy to
accomplish.
The data improvement used in this thesis is likely to be to time intensive to run for each vehicle
system contained in the master database. The effort to “push” the data “up” the DIKW pyramid
requires careful categorization by someone familiar with the existing data, the system being
repaired and the intent behind the data collection.
However, the principles of data characterization used retroactively on the data could be applied
at data entry, thus reducing the processing time and allowing an automation of the process of
calculating the proportional hazards model for any chosen component. The characterization of
the data at the point of entry must still be weighed against the increased processing time and the
problems with erroneous data entries (note: additional complexity causes additional potential
data entry error points).
6.3 Reaching the Peak of DIKW
The ability to plan for and predict how systems will perform (i.e. maintenance) in yet unseen
environmental conditions is a possibility with this concept. As more covariates are developed,
future reliability could be predicted by selecting those conditions the equipment will face in a
78
planned location. This will take the data accumulated at the bottom of the pyramid and push
them up to the wisdom pinnacle of the DIKW pyramid, allowing planners to know how the
equipment will perform and respond to these future conditions. This should also entail a cost
savings as spare parts packages can be custom tailored to the anticipated conditions.
6.4 Additional Data Manipulation
Additionally, once the data were characterized in this study, they became easy to manipulate and
configure, allowing quick extraction of information and, eventually, knowledge. Using these
now accessible data, a study of the Preventive Maintenance policy for this vehicle was
undertaken for the Canadian Armed Forces. The results of this investigation are included in
Appendix C.
79
Chapter 7
Future Work
Several future projects could be extended from this thesis.
7.1 ERP Data Characterization
Although likely too labour intensive to apply retroactively to data in the DND ERP,
modifications to the existing ERP entry system could allow data to be characterized at the point
of entry in a manner similar to that used in this thesis; this would create a quick method to
investigate other fleets.
7.2 Covariate Development
A wider range of covariates for a fleet of vehicles exposed to a wider range of locations and
conditions could be developed. A fleet with more exposure would allow the covariates to be
refined, including covariates proposed in this thesis (e.g. dust, wet) that were indefinable with
the available data.
7.3 Covariate Integration
Covariate development and spare parts estimation could be integrated into the planning module
of the ERP. When a new mission profile is selected, various covariates could be selected for
that location’s environment and conditions, and the ERP could project the MTTF and spares
requirement (as developed manually in section 5.7). The integration of this concept into an ERP
would have to be coded for each specific ERP software system.
80
References
[1] Department of National Defence, “C-04-xxx Draft LEMS Management Policy - V0.4.”
Department of National Defence, 30-Sep-2013.
[2] BAE Systems, “M113A2MK1 - BAE Systems - Brochure.” BAE Systems, Inc, 2011.
[3] K. Paul, Photo - IS2007-7242 - Canadian Forces Imagery Gallery. 2007.
[4] Department of National Defence, “B-GL-342-002 EME in LEMS - Draft V1.0.”
Department of National Defence, May-2012.
[5] “Preventative,” Merriam-Webster.com. 6 Aug 2014.
[6] Government of Canada, “PREVENTIVE MAINTENANCE - TERMIUM Plus® —
Search,” TERMIUM Plus®. Government of Canada, Canada.
[7] NATO, AAP-6 NATO Glossary of Terms and Definitions (English and French), 2012
Version 2. NATO Standardization Agency, 2012.
[8] C. E. Ebeling, An Introduction to Reliability and Maintainability Engineering, 2nd ed.
Long Grove, Ill: Waveland Press, 2010.
[9] J. Bentley, Introduction to Reliability and Quality Engineering, Second. Essex, England:
Pearson Education Limited, 1999.
[10] Department of National Defence, LOMMIS MK II - Maintenance Documentation
Preparation Procedures - Land Maintenance Control and Accounting Procedures.
Government of Canada, 1991.
[11] Department of National Defence, Guidance Manual - Logistic Support Analysis. Canada:
Government of Canada, 1998.
[12] Department of National Defence, “Preventive Maintenance,” Defence Terminology Bank.
Government of Canada, Canada.
[13] Department of National Defence, Sustainment. Canada: Government of Canada.
[14] British Standard Institute, “Preventive Maintenance,” Quality vocabulary. Availability,
reliability and maintainability terms Guide to concepts and related definitions. British
Standards Institute, London, 31-Oct-1991.
[15] US DoD, “Preventive Maintenance,” JP 1-02, Department of Defense Dictionary of
Military and Associated Terms. 15-Oct-2013.
[16] Federal Aviation Administration, TITLE 14—Aeronautics and Space, vol. 14 CFR 1.1.
1962.
[17] R. L. Ackoff, “From Data to Wisdom,” J. Appl. Syst. Anal., vol. 16, pp. 3–9, 1989.
81
[18] M. Aramon Bajestani, N. Montgomery, D. Banjevic, and A. K. S. Jardine, “Maintenance
Resource Planning for Utility Poles in a Power Distribution Network,” presented at the
61st Annual Reliability & Maintainability Symposium (RAMS 2015), 2015.
[19] D. Banjevic, A. K. S. Jardine, V. Makis, and M. Ennis, “A control-limit policy and
software for condition-based maintenance optimization,” INFOR-Ott.-, vol. 39, no. 1, pp.
32–50, 2001.
[20] M. R. Hodkewicz and N. Montgomery, “Data fitness for purpose: assessing the quality of
industrial data for use in mathematical models,” presented at the 8th IMA International
Conference on Modelling in Industrial Maintenance and Reliability, Oxford, UK, 2014.
[21] A. W. Labib, “A decision analysis model for maintenance policy selection using a
CMMS,” J. Qual. Maint. Eng., vol. 10, no. 3, pp. 191–202, 2004.
[22] US DoD, “MIL-STD-1629 - Procedures for Performing a Failure Mode, Effects and
Criticality Analysis (Cancelled).” Department of Defense (DoD), 24-Nov-1980.
[23] M. Mraz and B. Huber, “FMEA-FMECA.” Rep. Ljubljana: University of Ljubljana, 2005.
[24] B. Ghodrati, F. Ahmadzadeh, and U. Kumar, “Mean Residual Life Estimation Considering
Operating Environment,” presented at the International Conference on Quality, Reliability,
Infocom Technology and Industrial Technology Management, Delhi, 2012.
[25] B. Ghodrati, A. Ahmadi, and D. Galar, “Spare Parts Estimation For Machine Availability
Improvement Addressing Its Reliability And Operating Environment — Case Study,” Int.
J. Reliab. Qual. Saf. Eng., vol. 20, no. 03, p. 1340005, Jun. 2013.
[26] B. Ghodrati and U. Kumar, “Reliability and operating environment-based spare parts
estimation approach: A case study in Kiruna Mine, Sweden,” J. Qual. Maint. Eng., vol. 11,
no. 2, pp. 169–184, 2005.
[27] G. Ghodrati, “Optimizing Product Support (spare Parts Procurement) Strategy by
Considering System Operating Environment a Case Study,” presented at the 13th IFAC
Symposium on Information Control Problems in Manufacturing, V.A. Trapeznikov
Institute of Control Sciences, Russia, 2009, vol. 13, pp. 1322–1327.
[28] A. Barabadi and T. Markeset, “Reliability and maintainability performance under Arctic
conditions,” Int. J. Syst. Assur. Eng. Manag., vol. 2, no. 3, pp. 205–217, Sep. 2011.
[29] A. Barabadi, B. Ghodrati, J. Barabady, and T. Markeset, “Reliability and Spare Parts
Estimation taking into Consideration the Operational Environment-A Case Study,” in
IEEE International Conference on Industrial Engineering and Engineering Management,
Hong Kong, China, 2012, pp. 1924–1929.
[30] S. Furuly, A. Barabadi, and J. Barabady, “Reliability Analysis of Mining Equipment
Considering Operational Environments - A Case Study,” Int. J. Perform. Eng., vol. 9, no.
3, pp. 287–294, May 2013.
82
[31] E. L. Wong, “An EXAKT Proportional Hazards Model of Armoured Fighting Vehicle
Diesel Engine Failures,” Masters of Engineering, University of Toronto, Toronto, 2007.
[32] NATO, “AECTP-230 Climatic Conditions.” Allied Environmental Conditions and Test
Publication.
[33] C. Van Volkenburg, N. Montgomery, D. Banjevic, and A. Jardine, “The effect of
deterioration on spare parts holding,” presented at the Reliability and Maintainability
Symposium (RAMS), 2014 Annual, Colorado Springs, 2014, pp. 1–6.
[34] D. R. Cox, “Regression Models and Life-Tables,” J. R. Stat. Soc. Ser. B Methodol., vol. 34,
no. 2, pp. 187–220, 1972.
[35] A. K. S. Jardine and A. H. C. Tsang, Maintenance, Replacement, and Reliability - Theory
and Applications, 2nd ed. CRC Press, 2013.
[36] WearCheck International, “WearCheck - How to read MOB1 Report,” WearCheck.com.
[Online]. Available:
http://www.wearcheck.com/virtual_directories/Literature/WearCheck/WC-HOW-TO-
READ-MOB1.pdf. [Accessed: 31-Aug-2014].
[37] WearCheck International, “WearCheck - How to read MOB3 Report,” WearCheck.com.
[Online]. Available:
http://www.wearcheck.com/virtual_directories/Literature/WearCheck/WC-HOW-TO-
READ-MOB3.pdf. [Accessed: 31-Aug-2014].
[38] E. L. Wong, T. Jefferis, and N. Montgomery, “Proportional hazards modeling of engine
failures in military vehicles,” J. Qual. Maint. Eng., vol. 16, no. 2, pp. 144–155, 2010.
[39] “Weibull Distribution: Characteristics of the Weibull Distribution,” Reliability HotWire,
no. 14, Apr-2002.
[40] “Reliability Life Data Analysis (Weibull Analysis) - Statistical Analysis Using the Weibull
Model and Other Lifetime Distributions,” weibull.com. [Online]. Available:
http://www.weibull.com/basics/lifedata.htm. [Accessed: 28-Jul-2014].
[41] “Tool Tips: Difference between the mean life and characteristic life for the Weibull
distribution,” Reliability HotWire, no. 45, Nov-2004.
[42] “CBM Optimizer Software - EXAKT Version 4.2 - Guide and Manual.” CBM Lab, Dec-
2006.
[43] “Maximum Likelihood Function,” Reliability HotWire, no. 33, Nov-2003.
[44] G. Casella and R. L. Berger, Statistical Inference, Second Edition. Duxbury, 2002.
[45] C-MORE, Spares Management Software - SMS. Toronto: University of Toronto, 2013.
[46] Government of Ontario, Highway Traffic Act - R.R.O. 1990, Reg. 611. 2011.
83
[47] P. F. Knights, “Rethinking Pareto analysis: maintenance applications of logarithmic
scatterplots,” J. Qual. Maint. Eng., vol. 7, no. 4, pp. 252–263, 2001.
[48] Government of Canada, “ERP - TERMIUM Plus® — Search,” TERMIUM Plus®.
Government of Canada, Canada.
[49] B. Kumar, D. Deremer, and D. Marshall, Eds., “Preventive Maintenance,” An Illustrated
Dictionary of Aviation. McGraw-Hill, 2005.
84
Appendix A – ERP File Labels
Table 33 – ERP File Data Definition
Field Label Description Source
Equipment Unique equipment identifier used in DRMIS System generated
License Plate Unique identifier assigned to vehicle Vehicle unique
Equipment_
Description
Vehicle License Plate, equipment year of
manufacture or rebuild, and short description
(i.e. [41714]2001 UDLP MTVL TRACKED
LIGHT ARMO)
Directed from master data
Order Type L001- Created WO or L002- Preventive WO L001 from Notification,
L002 Internally generated
Order DRMIS unique Identifier assigned to each WO System generated
Main WorkCtr Top level work centre for a workshop System generated based
on login
Priority Levels 0 to 4 with zero being the highest User selected
MaintActivType Specific to type of services delivered User selected
Bas start date Basic Start Date, when planned start User entered
PM order_
Description
Plant Maintenance Order Description, why
work order was created
User freeform text
Opr short text Operator entered text from task notification User freeform text
Work estimated hours, may be from PRS Not mandatory, estimate
Actual work Amount to complete based on time cards From sub-program
Act finish date When technical complete WO From sub-program
Document Date When financial completion is posted System generated
Material What is ordered against from work order Directed from master data
Components_
Description
Material description Connected to material
number
Quantity Quantity of components used User entered, from sub-
program
Base Unit Holding quantity in supply system (i.e. EA –
Each, KT - Kit, FT - Foot)
From master data
Mat Doc Year Year Material Document created From master data
Work center Centre performing the work Based on work
assignment
Approx Usage Odometer reading (or hours reading) User entered
Usage date Date usage recorded User entered
85
Appendix B – CMMS File Labels
Table 34 – CMMS File Data Definition
Field Label Description Source
ERN Equipment Registration Number – Notes the type of
sub-fleet to which the vehicle belongs
From master data
ERN_DESC ERN Description in Text From master data
CFR Canadian Forces Registration Number – the unique
license plate of the vehicle
Vehicle unique
CIN_ID A unique identification number for the workshop
completing the work
Based on who is
entering the data
WO_COMP_DATE Work Order completion date Based on data
entry
WO_NUM Work Order identifier System generated
WO_USAGE Number of hours of labour on the Work Order User entered
based on sub-
program
WO_COMMENTS Comments text field entered by the operator User entered
freeform text
LAB_TR_ID Labour Trade ID – Trade skill of the technician
completing the work
User assigned
LAB_THRS Number of hours used by that trade on that line of
the Work Order
User entered
based on sub-
program
NSN_ID NATO stock number identification number From master data
NSN_QTY_USED Number of that stock used User entered
NSN_UOI_COST Cost per unit of issue of the NSN From master data
86
Appendix C – Preventive Maintenance Analysis
C.1 Data
As the existing data-bases became searchable and configurable, other actions could be taken to
move the data up the DIKW pyramid. As the data could now show the instances of repairs on
vehicle sub-systems, the quality of the preventive maintenance program could be commented
on.
C.2 Existing Inspection Regime
In order to assess the quality of the preventive maintenance routine, the existing preventive
maintenance inspection had to be inventoried. As this vehicle was on its third version, having
gone through two previous re-builds, the inspection instructions appear to have accumulated
inspection items over time. The instructions were located in multiple publications and were
directed at both operators and maintenance technicians.
C.3 Data Compilation
Generally, the inspections involve a daily operator inspection, a weekly operator inspection and
a semi-annual detailed maintenance technician inspection. The instructions titled “Daily”,
Periodic” and “Semi-Annual” were found in the vehicle maintenance manual; the “50-pt
checklist” was a supplemental guide for operators; “Op Instr-Daily” and “Op Instr- Prev Maint”
were found in the operator’s vehicle operation instruction; the “1136 Gen” were generic
armoured vehicle inspection instructions. The M113/TLAV table was compiled from various
sources (see sample in Appendix C Annex 1 Table 35).
Several of the inspection items did not seem to have an effect on improving the reliability of the
vehicle; however, they do have a safety aspect. To highlight those items, the inspection points
were compared to the Ontario Highway Traffic Act[46]. Although the Canadian Armed Forces
are not bound by a provincial highway traffic act, the Ontario Highway Traffic Act provided a
good reference for which safety items are normally addressed on civilian heavy trucks.
The existing inspections were characterized using the Component Type Coding (Table 2) used
to characterize the database.
87
C.4 Pareto Analysis
A common method of visualizing maintenance data and determining priorities is the use of a
Pareto chart [47]. The Pareto normally plots the failure codes against the duration of downtime
or the cost of repair.
As the data were characterized by components that have failed and the master NSN database
also contained the cost of the item, it was possible to produce a modified Pareto comparing
repair cost to that of the failed component (total cost of parts, no cost for downtime or labour)
over the lifetime of the fleet. As most of the engines, transmissions and power-packs used in
replacement are rebuilt items, the cost of a rebuild for these components versus the cost of a new
purchase was used.
Figure 5 – Repair Cost Pareto Histogram
Interestingly, if the full replacement value of power-packs, transmissions and engines was used,
their repair costs climb to $2M, $8M, $8M respectively. The cost of track repairs is also
artificially elevated due to the cost of modifying the vehicle and installing the Soucy rubber
88
track. As the Soucy track was installed before the older steel track wore out, an added cost is
captured in the data. Careful selection of the expenses has a considerable impact on this
particular Pareto histogram.
C.5 Pareto Comparison to Inspection Items
The Pareto analysis in Figure 5 is displayed as a comparison to the number of instances a
component system was referenced as an inspection item in the maintenance manual publication.
Figure 6 compares the Figure 5 Pareto diagram to those inspection items conducted by the
operator (from Table 35) either daily or periodically as an indicator of the effort and importance
the manual places on the fitness/serviceability of those components.
Figure 6 – Operator Inspections vs Costs of Repair
As can now be seen, certain components receive considerable attention on the inspections but
may not be getting the results intended. Assuming the operator has a finite time to conduct the
inspection, is the hull (HU) being over-inspected? Although it could be argued the cost of
repairs is low due to the quality of inspection, it is a likely candidate for analysis of
effectiveness (as most hull items are non-technical). Likewise, the engine (EN) has the most
inspection items, but it also has the highest repair costs; therefore, for the effort expended
inspecting engine related items, is it getting the best “bang for the buck”?
89
The data in Figure 6 can also be displayed as Operator Inspections vs Number of Repairs
(Figure 7).
Figure 7 – Operator Inspections vs Number of Repair Items
When presented in this format, we get a different appreciation of the data. The suspension (SU)
which was relatively inexpensive for parts cost has a very large number of repairs/components
used, largely because many of the components that make up the suspension are small hardware
items (gaskets, seals, nuts and bolts). This high number of repairs places a burden on the
maintenance technicians as they translate into maintenance technician repair time.
An alternative approach would be to time the operator at each inspection point and plot the
inspection times against the repairs. This would allow an analysis to determine if the inspection
time required is gaining a benefit when compared to the cost/time of repairs.
C.6 Moving Beyond Pareto
As can be seen in Figure 6 and Figure 7, with a Pareto (or a modified Pareto in our case), not all
of the data are adequately captured in the histogram. Knights [47] proposed the use of scatter
plots, specifically a scatter plot called a “Jack-knife diagram". Knights used Mean Time To
90
Repair (log scale y-axis) vs Number of Failures (log scale x-axis) and labelled his quadrants as
shown in Plate 5[47, Fig. 4].
Plate 5 – Log Scatterplot Showing Limit Values from Knights
As this characterized data for the M113 did not have MTTR information, material cost was
plotted on the y-axis with a similar effect, with the quadrants labeled: COSTLY, CHRONIC and
COSTLY & CHRONIC. In accordance with Knight, the quadrants can be set by several means;
in this case, a corporate policy (created for this study) set the COST boundary at $1,000,000 and
the CHRONIC boundary at 1000 items.
91
Figure 8 – Log Scatterplot of Cost vs Repair Instances
Using Figure 8, the effort of re-writing the inspection publications can determine which sections
may give the best “bang-for-the-buck”.
C.7 Observations
The characterized data from the CMMS/ERP are easy to manipulate and display in formats that
make it possible to make quick decisions on potential actions.
Based on Figure 8, it is questionable if the preventive maintenance program (including SOAP
analysis for the engine) is effective.
C.8 Recommendations
The inspection program needs to be rationalized across publications, based on a master
publication, ideally the maintenance manual. Those inspection items not required for safety
reasons (i.e. those not in the Highway Traffic Act) should be analyzed for elimination.
92
The inspection program also needs to be progressive; a progression from weekly to periodic to
semi-annual is required. If an item is inspected weekly, it must be determined if it also needs to
be inspected periodically and semi-annually. Those items inspected semi-annually by the
maintenance technicians should be of a technical nature (e.g. requiring longer duration, special
skills or tools, or of key safety consideration).
Despite the considerable number of inspection items directed at the engine, it is COSTLY &
CHRONIC. The engine inspection items need to be closely investigated. Specifically, the poor
collection of SOAP data may be causing a lack of situational awareness. If the SOAP data were
better managed, there is the potential to investigate whether a PHM could be developed for the
engine based on oil analysis data.
93
Annex 1 to Appendix C
Item
Component
Daily
50-pt checklist
Op Instr-Daily
Op Instr- Prev
Maint
Periodic
Semi-Annual
1136 Gen
(Ontario
Highway
Traffic Safety
Act) - RRO
1990 Reg 611
Reg 611 title
Exte
rio
r/H
ull
(in
spec
t)
Scr
apes
H
U
X
X
X
X
S
ched
1, 1
(4)
chas
sis
fram
e
scar
s H
U
X
X
X
Sch
ed 1
, 1
(4)
chas
sis
fram
e
ind
enta
tion
s H
U
X
X
S
ched
1, 1
(4)
chas
sis
fram
e
loo
se b
rack
ets
HU
X
X
X
bro
ken
wel
ds
HU
X
X
X
S
ched
1, 1
(4)
chas
sis
fram
e
loo
se o
r m
issi
ng h
ard
war
e H
U
X
X
exte
rior
ligh
ts a
nd
fix
ture
s H
U
X
X
X
Sch
ed 1
, 6
(1)
pre
scri
bed
lig
hti
ng
fluid
lea
ks
and
tam
per
ing
VE
X
X
X
pin
tle
ho
ok f
or
lubri
cati
on
an
d p
arts
H
U
X
X
X
X
X
X
X
Sch
ed 1
, 1
(12)(
a,b
,c,d
) tr
aile
r hit
ch s
ervic
eab
ilit
y
trai
ler
ou
tlet
for
dam
age
and
co
rro
sio
n
EL
X
X
X
X
X
bo
xes
an
d s
tow
age
fast
ened
sec
ure
ly
HU
X
X
X
X
X
S
ched
1, 1
(3)
ext
com
par
tmen
t d
oo
rs
secu
re t
ie d
ow
n s
trap
s H
U
X
X
X
chec
k f
inal
dri
ve
and
hull
dra
in p
lugs
HU
X
X
X
X
X
X
chec
k b
ott
om
acc
ess
cover
H
U
X
X
X
X
S
ched
1, 1
(3)
ext
com
par
tmen
t d
oo
rs
gla
cis
pla
te f
or
secu
rity
an
d m
issi
ng h
ard
war
e H
U
X
X
engin
e m
ain
acc
ess
cover
sea
ls
HU
X
X
X
X
engin
e ac
cess
han
dle
H
U
X
X
S
ched
1, 1
(1)(
e)
ho
od
lat
ch
engin
e ac
cess
co
ver
clo
ses
pro
per
ly
HU
X
chec
k g
ren
ade
lau
nch
er a
nd c
aps
WS
X
X
X
X
X
lub
rica
te g
ren
ade
laun
cher
W
S
X
X
air
inta
ke
dam
age,
co
nd
itio
n a
nd
cle
anli
nes
s E
N
X
X
X
X
Table 35 – TLAV Maintenance Manual and 1136 Comparison Chart
94
Appendix D – CMMS Database Sample
CFR
WO
_ N
UM
BER
WO
_
CO
MM
ENTS
WO
_
CO
MP
LETE
_DA
TEP
AR
T N
UM
BER
PA
RT_
Co
mp
on
en
ts_D
esc
rip
tio
n
QTY
_
USE
D
Wo
rksh
op
_ID
WO
_
USA
GE
(km
)
Mai
nt_
Typ
eC
om
p
Sub
_
Co
mp
Mai
nt_
Act
ion
XX
X01
WO
-357
G-0
9381
8
Re
pl T
ran
ny
06-S
ep
-06
131
93X
XX
XX
XX
XX
X01
WO
-357
G-0
9381
8
Re
pl T
ran
ny
06-S
ep
-06
2520
0000
1353
1YO
KE,
UN
IVER
SAL
JOIN
T,V
EHIC
ULA
R1
131
93C
DL
DS
SC
XX
X01
WO
-357
G-0
9381
8
Re
pl T
ran
ny
06-S
ep
-06
2520
0141
3197
5U
NIV
ERSA
L JO
INT,
VEH
ICU
LAR
11
3193
CD
LD
SSC
XX
X01
WO
-357
G-0
9381
8
Re
pl T
ran
ny
06-S
ep
-06
2520
2000
0484
4TR
AN
SMIS
SIO
N A
ND
CO
NTA
INER
11
3193
CTR
00R
E
XX
X01
WO
-357
G-0
9381
8
Re
pl T
ran
ny
06-S
ep
-06
2815
0146
1120
0EN
GIN
E,D
IESE
L1
131
93C
EN00
RE
XX
X01
WO
-357
G-0
9381
8
Re
pl T
ran
ny
06-S
ep
-06
3030
0149
2593
3B
ELT,
V1
131
93P
ENB
ER
E
XX
X01
WO
-357
G-0
9381
8
Re
pl T
ran
ny
06-S
ep
-06
4720
0124
9809
2H
OSE
,PR
EFO
RM
ED1
131
93C
ENA
FSC
XX
X01
WO
-357
G-0
9381
8
Re
pl T
ran
ny
06-S
ep
-06
4720
0125
1526
4H
OSE
ASS
EMB
LY,N
ON
MET
ALL
IC1
131
93C
TRR
ASC
XX
X01
WO
-357
G-0
9381
8
Re
pl T
ran
ny
06-S
ep
-06
4720
0130
6309
8H
OSE
ASS
EMB
LY,N
ON
MET
ALL
IC1
131
93C
TRR
ASC
XX
X01
WO
-357
G-0
9381
8
Re
pl T
ran
ny
06-S
ep
-06
4720
0149
7993
4H
OSE
,AIR
DU
CT
11
3193
CEN
AF
SC
XX
X01
WO
-357
G-0
9381
8
Re
pl T
ran
ny
06-S
ep
-06
4730
0090
8629
4C
LAM
P,H
OSE
51
3193
CEN
AF
SC
XX
X01
WO
-357
G-0
9381
8
Re
pl T
ran
ny
06-S
ep
-06
4730
0149
4617
4A
DA
PTE
R,S
TRA
IGH
T,P
IPE
TO H
OSE
21
3193
CC
CH
ER
E
XX
X01
WO
-357
G-0
9381
8
Re
pl T
ran
ny
06-S
ep
-06
4730
2000
0161
0C
OU
PLI
NG
HA
LF,Q
UIC
K D
ISC
ON
NEC
T2
131
93C
ENTU
SC
XX
X01
WO
-357
G-0
9381
8
Re
pl T
ran
ny
06-S
ep
-06
5305
0142
4874
4SC
REW
,CA
P,H
EXA
GO
N H
EAD
501
3193
CD
LSH
SC
XX
X01
WO
-357
G-0
9381
8
Re
pl T
ran
ny
06-S
ep
-06
5310
2192
0268
2W
ASH
ER,F
LAT
201
3193
CD
LD
SSC
Dat
a C
har
acte
riza
tio
nC
MM
S Ex
isti
ng
Dat
abas
e D
ata
Table 36 – CMMS Database Sample
95
Appendix E – ERP Database Sample
Lice
nse
_
pla
te
WO
_
Nu
mb
er
ord
er_
De
scri
pti
on
Op
era
tor
_sh
ort
_te
xt
Bas
e
_sta
rt
_dat
eP
art_
Nu
mb
er
Co
mp
on
en
ts_D
esc
rip
tio
n
QTY
_
USE
D
Act
ual
_
fin
ish
_dat
e
Wo
rk_
cen
ter
Ap
pro
x
_Usa
ge
(km
)
Usa
ge_
dat
e
Mai
nt_
Typ
eC
om
p
Sub
_
Co
mp
Mai
nt_
Act
ion
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1001
-069
9223
:NSN
IDLE
R P
IN,R
OA
DW
HEE
L5
24-M
ar-1
12
4646
28-S
ep
-10
CSU
SASC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1020
-001
6996
:NSN
BU
SHIN
G,M
OU
NT,
RA
DIA
TOR
BR
AC
KET
224
-Mar
-11
246
4628
-Se
p-1
0C
ENR
ASC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1000
-269
3218
:NSN
SCR
EW,C
AP
,HEX
AG
ON
HEA
D6
24-M
ar-1
12
4646
28-S
ep
-10
XX
XU
KU
K
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1001
-044
7270
:NSN
STU
D6
24-M
ar-1
12
4646
28-S
ep
-10
CEN
TCSC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1000
-996
0716
:NSN
HO
USI
NG
,MEC
HA
NIC
AL
DR
IVE
124
-Mar
-11
246
4628
-Se
p-1
0C
SUSA
SC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1001
-139
3748
:NSN
WH
EEL,
SOLI
D R
UB
BER
TIR
E1
24-M
ar-1
12
4646
28-S
ep
-10
PSU
RW
RE
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1001
-060
2531
:NSN
SEA
L,P
LAIN
EN
CA
SED
224
-Mar
-11
246
4628
-Se
p-1
0C
SUU
KSC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1000
-880
1624
:NSN
LIG
HT,
PA
RK
ING
124
-Mar
-11
246
4628
-Se
p-1
0C
HU
LIR
E
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1021
-921
4415
:NSN
BO
X,A
CC
ESSO
RIE
S ST
OW
AG
E1
24-M
ar-1
12
4646
28-S
ep
-10
CH
UB
IR
E
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1001
-497
9934
:NSN
HO
SE,A
IR D
UC
T1
24-M
ar-1
12
4646
28-S
ep
-10
CEN
AF
SC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1001
-070
9506
:NSN
AR
M A
SSEM
BLY
,PIV
OT,
TRA
CK
SUSP
ENSI
ON
124
-Mar
-11
246
4628
-Se
p-1
0C
SUSA
RE
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1020
-002
4232
:NSN
INST
ALL
ATI
ON
KIT
,RA
CK
ASS
EMB
LY,T
OB
OG
GA
N1
24-M
ar-1
12
4646
28-S
ep
-10
MH
UB
IIN
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1001
-503
3409
:NSN
REG
ULA
TOR
,EN
GIN
E
GEN
ERA
TOR
124
-Mar
-11
246
4628
-Se
p-1
0C
ENA
LSC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1001
-247
4686
:NSN
BEL
T,V
124
-Mar
-11
246
4628
-Se
p-1
0P
ENB
ER
E
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1020
-000
2262
:NSN
WIR
ING
HA
RN
ESS,
BR
AN
CH
ED1
24-M
ar-1
12
4646
28-S
ep
-10
CC
CH
ESC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1012
-187
3068
:NSN
MIR
RO
R H
EAD
,VEH
ICU
LAR
124
-Mar
-11
246
4628
-Se
p-1
0C
HU
MI
RE
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1012
-361
8863
:NSN
CO
NTR
OL
UN
IT,H
EATI
NG
124
-Mar
-11
246
4628
-Se
p-1
0C
ELH
ESC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1001
-419
5059
:NSN
PLU
G S
ET,P
RO
TEC
TIV
E,D
UST
AN
D M
OIS
TUR
E SE
124
-Mar
-11
246
4628
-Se
p-1
0C
ENC
OSC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1020
-002
0337
:NSN
WIR
ING
HA
RN
ESS
124
-Mar
-11
246
4628
-Se
p-1
0C
CC
HE
SC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1020
-002
3337
:NSN
CO
NN
ECTO
R M
OU
NT
ASS
EMB
LY1
24-M
ar-1
12
4646
28-S
ep
-10
CEL
HE
SC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1000
-971
5013
:NSN
MO
UN
T,R
ESIL
IEN
T, W
EAP
ON
SYST
EM1
24-M
ar-1
12
4646
28-S
ep
-10
CW
SM
OSC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1020
-002
7509
:NSN
PLA
TE,I
NST
RU
CTI
ON
124
-Mar
-11
246
4628
-Se
p-1
0C
HU
XX
XX
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1001
-499
1465
:NSN
RA
DIA
TOR
,EN
GIN
E C
OO
LAN
T1
24-M
ar-1
12
4646
28-S
ep
-10
CEN
RA
RE
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1001
-251
1752
:NSN
BR
AC
KET
,EN
GIN
E A
CC
ESSO
RY
124
-Mar
-11
246
4628
-Se
p-1
0C
ENTC
SC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1020
-001
2996
:NSN
CO
VER
ASS
EMB
LY1
24-M
ar-1
12
4646
28-S
ep
-10
CH
UC
OR
E
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1000
-959
1488
:NSN
NU
T,SE
LF-L
OC
KIN
G,H
EXA
GO
N1
24-M
ar-1
12
4646
28-S
ep
-10
XX
XU
KU
K
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1001
-492
5971
:NSN
TUB
E A
SSEM
BLY
,MET
AL
124
-Mar
-11
246
4628
-Se
p-1
0C
ENTC
SC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1000
-567
2502
:NSN
MA
NIF
OLD
,EX
HA
UST
124
-Mar
-11
246
4628
-Se
p-1
0C
ENEX
SC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1001
-494
4991
:NSN
TEE,
PIP
E TO
HO
SE1
24-M
ar-1
12
4646
28-S
ep
-10
CEN
TCSC
XX
X02
1101
0080
61R
ep
airs
fro
m IN
SPP
arts
13-A
pr-
1000
-023
4492
:NSN
WA
SHER
,EN
GIN
E1
24-M
ar-1
12
4646
28-S
ep
-10
CEN
TCSC
Dat
a C
har
acte
riza
tio
nER
P E
xist
ing
Dat
abas
e D
ata
Table 37 – ERP Database Sample
96
Appendix F – Sample EXAKT Events
Table 38 – EXAKT Table – Events
Ident Date WorkingAge Event Comment
XXX01 8/24/01 12:00 0 B
XXX01 10/31/12 15:30 1784 EF
XXX01 10/31/12 15:45 1784 BEF
XXX02 12/07/01 12:00 0 B
XXX02 4/11/06 15:30 4428 EF
XXX02 4/11/06 15:45 4428 BEF
XXX02 4/22/08 15:30 12190 EF
XXX02 4/22/08 15:45 12190 BEF
XXX02 7/08/08 15:30 12949 EF
XXX02 7/08/08 15:45 12949 BEF
XXX02 7/16/09 15:30 17717 EF
XXX02 7/16/09 15:45 17717 BEF
XXX02 7/16/09 16:30 17717 ES
XXX02 7/16/09 16:45 17717 BES
XXX02 6/19/13 15:30 25420 EF
XXX02 6/19/13 15:45 25420 BEF
XXX03 12/07/01 12:00 0 B
XXX03 12/07/01 12:00 0 B
XXX04 12/07/01 12:00 0 B
XXX04 8/04/07 15:30 907 EF
XXX04 8/04/07 15:45 907 BEF
XXX05 12/07/01 12:00 0 B
XXX05 4/10/08 15:30 10873 EF
XXX05 4/10/08 15:45 10873 BEF
XXX06 12/07/01 12:00 0 B
XXX06 12/07/05 15:30 9457 EF
XXX06 12/07/05 15:45 9457 BEF
XXX06 5/01/07 15:30 11705 EF
XXX06 5/01/07 15:45 11705 BEF
XXX07 12/07/01 12:00 0 B
XXX07 6/30/06 15:30 7903 EF
XXX07 6/30/06 15:45 7903 BEF
XXX07 10/16/13 15:30 15287 EF
XXX07 10/16/13 15:45 15287 BEF
XXX08 2/13/02 12:00 0 B
XXX08 7/14/08 15:30 4381 EF
XXX08 7/14/08 15:45 4381 BEF
97
Appendix G – Sample EXAKT Inspections
Table 39 – EXAKT Table – Inspections
Ident Date WorkingAge aoa bog c1 idle opexp Comment
XXX01 8/24/01 12:01 0 0 0 1 1 1 D
XXX01 2/14/11 13:00 880 0 1 1 0 0 I
XXX01 3/02/11 13:00 880 0 1 1 0 0 I
XXX01 1/09/12 13:00 1512 0 1 1 0 0 I
XXX01 3/14/12 13:00 1512 0 1 1 0 0 I
XXX01 6/25/12 13:00 1512 0 1 1 0 0 I
XXX01 10/31/12 15:00 1784 0 1 1 0 0 DEF
XXX01 1/29/13 13:00 1784 0 1 1 0 0 I
XXX01 3/18/13 13:00 1784 0 1 1 0 0 I
XXX01 7/29/13 13:00 2766 0 1 1 0 0 I
XXX02 12/07/01 12:01 0 0 1 1 0 0 D
XXX02 5/27/02 13:00 143 0 1 1 0 0 I
XXX02 6/13/02 13:00 159 0 1 1 0 0 I
XXX02 6/13/02 13:00 159 0 1 1 0 0 I
XXX02 1/22/03 13:00 2121 0 1 1 0 0 I
XXX02 3/24/03 13:00 2121 0 1 1 0 0 I
XXX02 10/28/04 13:00 4352 0 1 1 0 0 I
XXX02 11/21/05 13:00 4428 0 1 1 0 0 I
XXX02 12/20/05 13:00 4428 0 1 1 0 0 I
XXX02 4/11/06 15:00 4428 0 1 1 0 0 DEF
XXX02 4/20/06 13:00 4428 0 1 1 0 0 I
XXX02 9/01/06 13:00 8232 0 1 1 0 0 I
XXX02 3/08/07 13:00 8232 0 1 1 0 0 I
XXX02 3/29/07 13:00 8232 0 1 1 0 0 I
XXX02 4/27/07 13:00 8232 0 1 1 0 0 I
XXX02 6/08/07 13:00 9728 0 1 1 0 0 I
XXX02 4/22/08 15:00 12190 0 1 1 0 0 DEF
XXX02 5/15/08 13:00 12190 0 1 1 0 0 I
XXX02 5/16/08 13:00 12190 0 1 1 0 0 I
XXX02 7/08/08 15:00 12949 0 1 1 0 0 DEF
XXX02 7/28/08 13:00 12949 0 1 1 0 0 I
XXX02 1/23/09 13:00 16073 0 1 1 0 0 I
XXX02 1/23/09 13:00 16073 0 1 1 0 0 I
XXX02 7/16/09 15:00 17717 0 1 1 0 0 DEF
XXX02 7/16/09 16:00 17717 0 1 1 0 0 DES
XXX02 6/21/10 13:00 21793 0 1 1 0 0 I
XXX02 12/06/11 13:00 23514 0 1 1 0 0 I
98
Appendix H – Transmission Location Covariate Reduction
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 1.401e+4 - 3781 - - - 6596 2.142e+4
Shape 1.272 Y 0.1176 5.362 0.02058 - 1.042 1.503
Location 2 1.028 N 0.7898 1.693 0.1932 2.794 -0.5204 2.575
Location 3 -17.84 N 115.8 0.02372 0.8776 1.782e-8 -244.9 209.2
Location 4 0.74 Y 0.3639 4.136 0.04197 2.096 0.02685 1.453
Location 5 -17.48 N 80.33 0.04733 0.8278 2.571e-8 -174.9 140
Location 6 3.829 N 1.47e+10 6.791e-20 1 46.04 -2.88e+10 2.88e+10
Location 7 -15.7 N 127.7 0.01512 0.9021 1.518e-7 -266 234.6
Location 8 -11.01 N 42.76 0.06634 0.7967 1.646e-5 -94.83 72.8
Location 9 -0.09131 N 0.8691 0.01104 0.9163 0.9127 -1.795 1.612
Location 10 -10.8 N 58.01 0.03468 0.8523 2.034e-5 -124.5 102.9
Table 40 – Transmission Locational Covariates – second reduction step
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 1.401e+4 - 3781 - - - 6596 2.142e+4
Shape 1.272 Y 0.1176 5.363 0.02057 - 1.042 1.503
Location 2 1.028 N 0.7898 1.693 0.1932 2.794 -0.5204 2.575
Location 3 -17.69 N 111.6 0.02515 0.874 2.07e-8 -236.4 201
Location 4 0.74 Y 0.3639 4.137 0.04196 2.096 0.0269 1.453
Location 5 -18.39 N 100.9 0.03319 0.8554 1.033e-8 -216.2 179.4
Location 7 -16.46 N 154.4 0.01136 0.9151 7.111e-8 -319.1 286.2
Location 8 -13.55 N 81.3 0.02776 0.8677 1.308e-6 -172.9 145.8
Location 9 -0.09033 N 0.8687 0.01081 0.9172 0.9136 -1.793 1.612
Location 10 -12.42 N 87.14 0.02032 0.8866 4.026e-6 -183.2 158.4
99
Table 41 – Transmission Locational Covariates – third reduction step
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 1.419e+4 - 3433 - - - 7459 2.092e+4
Shape 1.272 Y 0.1176 5.372 0.02046 - 1.042 1.503
Location 2 1.044 N 0.7745 1.817 0.1777 2.841 -0.474 2.562
Location 3 -17.76 N 113.4 0.02452 0.8756 1.946e-8 -240 204.5
Location 4 0.7564 Y 0.3304 5.241 0.02206 2.131 0.1088 1.404
Location 5 -18.02 N 92.6 0.03788 0.8457 1.492e-8 -199.5 163.5
Location 7 -15.96 N 136.8 0.01361 0.9071 1.177e-7 -284 252.1
Location 8 -12.97 N 70.58 0.03377 0.8542 2.331e-6 -151.3 125.4
Location 10 -12.07 N 79.41 0.02311 - - 7459 2.092e+4
Table 42 – Transmission Locational Covariates – forth reduction step
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 1.512e+4 - 3671 - - - 7922 2.231e+4
Shape 1.275 Y 0.1175 5.479 0.01925 - 1.045 1.505
Location 2 1.127 N 0.7743 2.119 0.1454 3.087 -0.3904 2.645
Location 3 -17.57 N 112.9 0.02424 0.8763 2.333e-8 -238.8 203.7
Location 4 0.8387 Y 0.3304 6.444 0.01114 2.313 0.1911 1.486
Location 5 -18.47 N 106.2 0.03024 0.8619 9.547e-9 -226.6 189.7
Location 8 -12.47 N 63.52 0.03855 0.8443 3.831e-6 -137 112
Location 10 -12.47 N 83.21 0.02244 0.8809 3.859e-6 -175.6 150.6
Table 43 – Transmission Locational Covariates – fifth reduction step
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 1.543e+4 - 3759 - - - 8057 2.279e+4
Shape 1.274 Y 0.1174 5.448 0.01959 - 1.044 1.504
Location 2 1.152 N 0.7745 2.213 0.1369 3.165 -0.3659 2.67
Location 3 -17.11 N 99.79 0.02939 0.8639 3.717e-8 -212.7 178.5
Location 4 0.8626 Y 0.3309 6.795 0.009142 2.369 0.214 1.511
Location 5 -20.43 N 156.2 0.01711 0.8959 1.338e-9 -326.6 285.7
Location 8 -11.76 N 46.28 0.06453 0.7995 7.846e-6 -102.5 78.94
100
Table 44 – Transmission Locational Covariates – sixth reduction step
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 1.913e+4 - 4811 - - - 9704 2.856e+4
Shape 1.284 Y 0.115 6.108 0.01346 - 1.059 1.51
Location 2 1.435 N 0.7775 3.408 0.06489 4.201 -0.08864 2.959
Location 3 -18.46 N 158.2 0.01361 0.9071 9.618e-9 -328.6 291.6
Location 4 1.131 Y 0.3396 11.09 0.000869 3.099 0.4653 1.797
Location 8 -16.12 N 151.2 0.01136 0.9151 1.002e-7 -312.5 280.2
Table 45 – Transmission Locational Covariates – seventh reduction step
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 2.049e+4 - 5213 - - - 1.028e+4 3.071e+4
Shape 1.278 Y 0.1147 5.87 0.0154 - 1.053 1.503
Location 2 1.517 N 0.7781 3.801 0.05121 4.559 -0.008003 3.042
Location 3 -18.24 N 156 0.01367 0.9069 1.201e-008 -323.9 287.5
Location 4 1.211 Y 0.3413 12.59 0.000388 3.356 0.542 1.88
Table 16 – Transmission Locational Covariates – Reduced
Parameter Scale Sign
(*)
Std Error Wald p-Value Exp of
Estimate
95%CI
Lower Upper
Scale 2.322e+4 - 5978 - - - 1.15e+4 3.494e+4
Shape 1.285 Y 0.1151 6.114 0.01341 - 1.059 1.51
Location 2 1.685 Y 0.7776 4.693 0.03029 5.39 0.1604 3.209
Location 3 1.379 Y 0.34 16.45 0 3.972 0.7128 2.046
101
Appendix I – Definitions
Table 46 – Definitions
Term Abbreviation Definition
Computerized
Maintenance
Management System
CMMS
A maintenance registry/log of faults and actions taken
Enterprise Resource
Planning
ERP A collection of software programs which ties all of an
enterprise's various functions (finance, manufacturing,
sales, HR, etc.) into a cohesive data base.[48]
Mean Down Time MDT Total down time / Number of failures. [9, p. 30].
Would include all time a systems is down (Down time
= Realization time + Access time + Diagnosis time +
Logistics time [i.e. waiting parts] +
Repair/Replacement time + Checkout time).[9, p. 144]
Mean Time Between
Failures MTBF Total up time / Number of failures.[9, p. 32], typically
for repairable systems.
Mean Time To
Failure MTTF Total up time / Number of failures.[9, p. 29], typically
given for non-repairable items.
Mean Time To Repair MTTR A component of MDT. Normally includes Access
time, Diagnosis time, Repair/Replacement time and
Checkout time.[9, p. 145]. However, dependent on
local policy, it could be limited to Repair/Replace
time.
Spectrometric Oil
Analysis Program SOAP An oil analysis program to forewarn the operator of
any potential problem in the engine. The samples of oil
are burned in an electric arc. The wavelength of the
resulting light is then checked. These values are then
compared against the standard to determine if there is
any abnormality.[49]