Implementac´ ıon de Equipos de Control no Lineal con Muestreo Asincr´onico Juan M. Alvarez Leiva 1 Juan Jos´ e Tarrio 2 Ernesto Kofman 13 1. FCEIA – UNR [email protected]2. CAB – CNEA [email protected]3. CIFASIS – CONICET [email protected]Abstract— En el presente art´ ıculo se descri- ben dos dispositivos experimentales de control, un P´ endulo Invertido Rotacional y un Levita- dor Magn´ etico. Ambos equipos implementan, como principal caracter´ ıstica, un esquema de muestreo asincr´onico para la medici´on de las variables de inter´ es, y control QSC con el soft- ware PowerDEVS. Se describe la forma en que se implement´ o el esquema de medici´on, as´ ı co- mo tambi´ en su interfaz con el sistema de con- trol. Finalmente, se presentan ensayos para am- bos dispositivos en los que se prueba el correc- to funcionamiento del esquema de muestreo y control. Keywords— DEVS, PENDUBOT, QSC, LEVITADOR MAGN ´ ETICO, MUESTREO ASINCR ´ ONICO. 1. INTRODUCCI ´ ON La idea principal detr´as de los esquemas de muestreo asincr´onico es la adquisici´on de nuevas muestrasde las variables medidas, s´olo cuando estas var´ ıan de manera significativa. En el caso de lazos de control implemen- tados en redes de comunicaci´ on, esto permite reducir el ancho de banda de la transmisi´on. La presencia del muestreo asincr´onico brinda la po- sibiliad de implementar esquemas de control del tipo muestreo por cruces de nivel [3, 11, 7] como Quanti- zed State Control (QSC), en los cuales todas las va- riables se encuentran cuantizadas, generando nuevas salidas s´olo en caso de variaciones significativas. Adi- cionalmente, estos esquemas de control han probado beneficios, como la posibilidad de garantizar estabili- dad incluso en plantas no lineales [9, 8]. Si bien la literatura muestra muchos resultados te´oricos sobre el control por cruces de nivel, hay muy pocas aplicaciones pr´acticas reportadas. El motivo principal de esto es que no hay dispositivos comerciales que realicen muestreo por cruces de nivel. Si bien hay reportado alg´ un dise˜ no [1], el mismo consiste s´olo en la etapa de adquisici´on, careciendo de cualquier funcio- nalidad que le permita interactuar con un dispositivo digital de control. Por este motivo se decidi´o brindar al usuario de los dispositivos la posibilidad de experi- mentar con este tipo de t´ ecnicas. Los equipos desarrollados son un P´ endulo Invertido Rotacional y un Levitador Magn´ etico, e implementan la medici´on de todas las variables de inter´ es, presen- tando un comportamiento asincr´onico. Los controla- dores se implementan en una PC, y la comunicaci´ on con la misma es mediante el puerto paralelo bidirec- cional. La forma en que los dispositivos informan al controlador de un cambio en alguna de las variables es mediante una interrupci´on. Esto, combinado con la utilizaci´on de un sistema operativo en tiempo real, permite obtener bajas latencias de medici´on. La sali- da del controlador es enviada de manera asincr´onica por el mismo medio, implement´ andose as´ ı de manera completa un esquema de control QSC. El entorno utilizado para la implementaci´ on de los controladores QSC fue el software PowerDEVS, el cual permite el dise˜ no interactivo y flexible de diferentes esquemas de control, bajo el formalismo DEVS. El dise˜ no y la implementaci´ on del dispositivo y el desarrollo de los ejemplos se realizaron como parte de un proyecto final de ingenier´ ıa electr´onica en la Facul- tad de Ciencias Exactas, Ingenier´ ıa y Agrimensura de la Universidad Nacional de Rosario [2]. 2. BACKGROUND 2. 1. MuestreoAsincr´onico Los dispositivos tradicionales de conversi´ onanal´ogi- ca digital realizan el muestreo a una frecuencia prefija- da, independiente de lo que ocurra instant´ aneamente con la se˜ nal de entrada anal´ogica. La conversi´ on asincr´onica, en cambio, implica que las muestras se tomen s´olo cuando hay cambios signi- ficativos en la se˜ nal anal´ogica. En diversos enfoques y aplicaciones de control [11, 8, 1] esto se implementa de forma tal que se toma una muestra cada vez que la se˜ nal anal´ogica difiere de la se˜ nal digital en una magni-
Transcript
Implementacıon de Equipos de Control no Lineal con MuestreoAsincronico
Juan M. Alvarez Leiva 1 Juan Jose Tarrio 2 Ernesto Kofman 1 3
Abstract— En el presente artıculo se descri-ben dos dispositivos experimentales de control,un Pendulo Invertido Rotacional y un Levita-dor Magnetico. Ambos equipos implementan,como principal caracterıstica, un esquema demuestreo asincronico para la medicion de lasvariables de interes, y control QSC con el soft-ware PowerDEVS. Se describe la forma en quese implemento el esquema de medicion, ası co-mo tambien su interfaz con el sistema de con-trol. Finalmente, se presentan ensayos para am-bos dispositivos en los que se prueba el correc-to funcionamiento del esquema de muestreo ycontrol.
La idea principal detras de los esquemas de muestreoasincronico es la adquisicion de nuevas muestras de lasvariables medidas, solo cuando estas varıan de manerasignificativa. En el caso de lazos de control implemen-tados en redes de comunicacion, esto permite reducirel ancho de banda de la transmision.
La presencia del muestreo asincronico brinda la po-sibiliad de implementar esquemas de control del tipomuestreo por cruces de nivel [3, 11, 7] como Quanti-zed State Control (QSC), en los cuales todas las va-riables se encuentran cuantizadas, generando nuevassalidas solo en caso de variaciones significativas. Adi-cionalmente, estos esquemas de control han probadobeneficios, como la posibilidad de garantizar estabili-dad incluso en plantas no lineales [9, 8].
Si bien la literatura muestra muchos resultadosteoricos sobre el control por cruces de nivel, hay muypocas aplicaciones practicas reportadas. El motivoprincipal de esto es que no hay dispositivos comercialesque realicen muestreo por cruces de nivel. Si bien hayreportado algun diseno [1], el mismo consiste solo en la
etapa de adquisicion, careciendo de cualquier funcio-nalidad que le permita interactuar con un dispositivodigital de control. Por este motivo se decidio brindaral usuario de los dispositivos la posibilidad de experi-mentar con este tipo de tecnicas.
Los equipos desarrollados son un Pendulo InvertidoRotacional y un Levitador Magnetico, e implementanla medicion de todas las variables de interes, presen-tando un comportamiento asincronico. Los controla-dores se implementan en una PC, y la comunicacioncon la misma es mediante el puerto paralelo bidirec-cional. La forma en que los dispositivos informan alcontrolador de un cambio en alguna de las variableses mediante una interrupcion. Esto, combinado conla utilizacion de un sistema operativo en tiempo real,permite obtener bajas latencias de medicion. La sali-da del controlador es enviada de manera asincronicapor el mismo medio, implementandose ası de maneracompleta un esquema de control QSC.
El entorno utilizado para la implementacion de loscontroladores QSC fue el software PowerDEVS, el cualpermite el diseno interactivo y flexible de diferentesesquemas de control, bajo el formalismo DEVS.
El diseno y la implementacion del dispositivo y eldesarrollo de los ejemplos se realizaron como parte deun proyecto final de ingenierıa electronica en la Facul-tad de Ciencias Exactas, Ingenierıa y Agrimensura dela Universidad Nacional de Rosario [2].
2. BACKGROUND
2. 1. Muestreo Asincronico
Los dispositivos tradicionales de conversion analogi-ca digital realizan el muestreo a una frecuencia prefija-da, independiente de lo que ocurra instantaneamentecon la senal de entrada analogica.
La conversion asincronica, en cambio, implica quelas muestras se tomen solo cuando hay cambios signi-ficativos en la senal analogica. En diversos enfoques yaplicaciones de control [11, 8, 1] esto se implementade forma tal que se toma una muestra cada vez que lasenal analogica difiere de la senal digital en una magni-
tud determinada, denominada ancho de cuantizaciony que aquı denotaremos como ∆Q.
La Figura 1 muestra una trayectoria de entrada y lacorrespondiente salida de un conversor analogico digi-tal que sigue este principio.
Figura 1: Entrada y Salida de unCAD Asincronico.
Esta forma de muestreo tiene varias caracterısticasventajosas:
La velocidad de muestreo se adapta a la senalanalogica, lo que reduce notablemente el nume-ro de muestras tomadas. Esto a su vez, permiteahorrar energıa en muchas aplicaciones [1].
La diferencia entre muestras sucesivas es siempre±∆Q, por lo que se puede codificar utilizando unsolo bit. Esto permite ahorrar ancho de banda decomunicacion para transmitir las muestras sobreuna red.
Suponiendo retencion de orden cero (como en laFig.1), se garantiza siempre que la senal analogi-ca original y la muestreada nunca difieren enmas de ∆Q. Por el contrario, en los dispositivosde muestreo tradicionales no se puede estableceruna cota de la diferencia entre ambas senales, yaque no hay control de lo que ocurre entre instan-tes de muestreo.
Debido a lo anterior, la presencia de un CADasıncrono solo introduce una perturbacion aco-tada. Esto introduce ventajas desde el punto devista de la estabilidad (ver seccion 2. 2)
En un esquema practico de un conversion A/Dasincronica, el valor de la ultima conversion se alma-cena en un registro. Dicho valor se compara continua-mente con la senal de entrada. Si la diferencia es mayora +∆Q o menor a −∆Q, se suma o resta una unidadal valor del registro respectivamente, obteniendose unanueva conversion.
2. 2. Quantized State Control
Segun las definiciones presentadas en [10], se llamaQuantized State Control (QSC) a un sistema de controlcontinuo, representado como un Sistema de EstadosCuantizados. Los Sistemas de Estados Cuantizados, (o
QSS por sus siglas en ingles) son modelos en tiempocontinuo, donde cada variable de estado se ve afectadapor una funcion de cuantizacion con histeresis.
Una gran ventaja del QSC es que es posible garan-tizar estabilidad practica [9], incluso en sistemas decontrol no lineales [8].
Basandose en que la medicion asincronica introduceuna perturbacion acotada en la variable medida, hasido demostrado [10] que las trayectorias del sistemacontrolado seran finalmente acotadas, sobre las trayec-torias que tendrıa un controlador continuo.
2. 3. PowerDEVS
Si bien el dispositivo desarrollado funciona indepen-dientemente del software que se utilice en la compu-tadora a la que se conecte, sus caracterısticas asıncro-nicas sugieren la conveniencia de utilizar herramientasde simulacion y control por eventos discretos, capacesde ejecutarse en tiempo real y con acceso a interrup-ciones de hardware que permitan recibir las muestrasde manera asincronica.
PowerDEVS [6] es una herramienta de simulacionpor eventos discretos basada en el formalismo DEVS[13]. PowerDEVS tiene como caracterısticas salientesel hecho de funcionar bajo distintos sistemas opera-tivos convencionales (Windows y Linux ) y ademas enun sistema operativo de tiempo real (Linux RTAI ) confuncionalidades muy simples de utilizar para captu-rar interrupciones y sincronizar el tiempo de simula-cion con latencias del orden de un microsegundo [6].Ademas, tiene librerıas que implementan metodos deintegracion numerica por cuantificacion que permitensimular de manera muy eficiente sistemas continuos ehıbridos y pueden implementar de manera trivial sis-temas de control QSC. Como caracterıstica adicional,PowerDEVS se comunica con el espacio de trabajo deScilab [5], lo que facilita el diseno de sistemas de con-trol y el procesamiento posterior de datos medidos.
Por estos motivos, y teniendo en cuenta que ya fueutilizado con exito en aplicaciones de control asincroni-co y simulacion en tiempo real mediante metodos decuantificacion [4], PowerDEVS aparece como la herra-mienta de software mas adecuada para utilizar el dis-positivo desarrollado.
Desde el punto de vista del usuario, PowerDEVScuenta con un interface grafica que permite describirlos sistemas en forma de diagramas de bloque (ver fi-gura 2).
El comportamiento de los bloques que componenlos modelos se describe en lenguaje C++, definiendolas distintas funciones correspondientes al formalismoDEVS. De esta manera, es muy sencillo crear bloquesnuevos. El modelo de la figura 2 esta formado por blo-ques de la librerıa de PowerDEVS y el bloque MagLev.Este ultimo es un modelo encapsulado de otro archi-vo (otra de las funcionalidades de PowerDEVS), cuyocontenido puede verse en la figura 3.
El bloque denominado Sistema de Adquisicion im-
Figura 2: Modelo en PowerDEVS deun Sistema de Control
Figura 3: Contenido del bloque Ma-gLev, de la figura 2.
plementa la comunicacion con los equipos desarrolla-dos, y sera descrito oportunamente.
Cuando se da la orden de simular un modelo, Po-werDEVS traduce la estructura del Diagrama de Blo-ques en un programa C++ que utiliza las clases quecontienen el codigo de cada bloque y las clases que im-plementan el motor de simulacion. Dicho programa enC++ se compila y es el encargado de ejecutar la simu-lacion. Las simulaciones pueden ejecutarse sincroniza-das con un reloj de tiempo real (esto funciona en losdistintos sistemas operativos, pero es particularmentepreciso bajo Linux RTAI ), lo que permite realizar si-mulaciones en tiempo real e implementar sistemas decontrol.
Este software, desarrollado en la Universidad Na-cional de Rosario, es de distribucion libre bajo licenciaGPL.
3. DESCRIPCION DE LOS EQUIPOS
3. 1. Hardware
Como se introdujo anteriormente, las tecnicas demuestreo y control asincronico fueron implementadasen dos equipos, un Levitador Magnetico y un PenduloInvertido Rotacional.
En el caso del Levitador Magnetico se trabajo sobreun equipo previamente desarrollado [12], y puede ver-se en la figura 4. El mismo consistıa en un electroimancuya tension de entrada era controlada por medio deuna senal PWM. El sistema era realimentado con laposicion del objeto a levitar (una esfera de acero de
16mm de diametro) midiendola por medio de un sen-sor lumınico conformado por un haz de luz y un LDR,a partir del cual podıa estimarse la posicion en funciondel valor de resistencia. Las variables eran adquiridassincronicamente por un microcontrolador y envıadas auna PC mediante puerto paralelo (con protocolo SPP).En la PC se procesaban las senales por medio de la in-terfaz Real Time Workshop de Simulink/MATLAB yla senal de control se enviaba nuevamente al micro-controlador para la generacion de la senal PWM. Elobjetivo de control es estabilizar la posicion de la es-fera en una altura de referencia.
Figura 4: Levitador Magnetico.
Al equipo se le agrego un modulo de sensado dela corriente de la bobina, y se modifico la electronicadel sensor de posicion para extender el rango de me-dicion. Tambien se reemplazo el microcontrolador poruno de mayor velocidad y prestaciones, de manera deimplementar correctamente el esquema de sensado ycomunicacion descrito en los apartados siguientes.
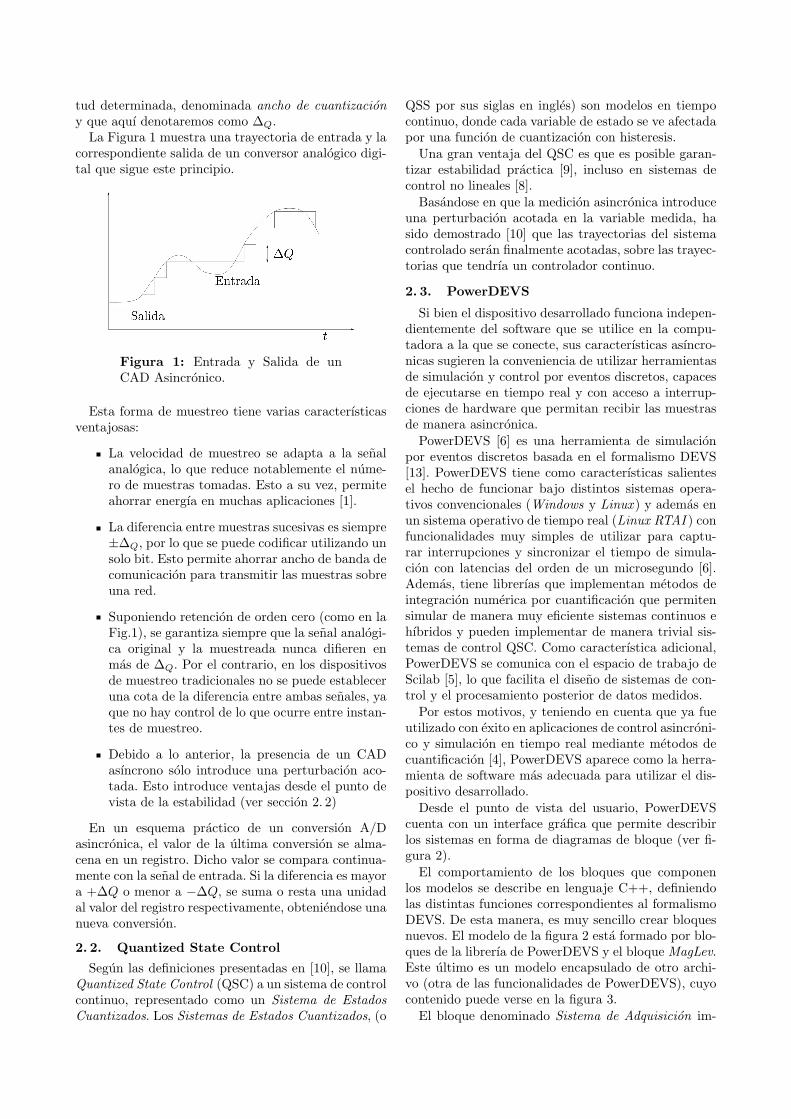
El Pendulo Invertido fue desarrollado ıntegramen-te, obteniendose como resultado el equipo mostradoen la figura 5. El mismo es un dispositivo experimen-tal que consta de dos brazos rıgidos, uno de los cualesesta sujeto en uno de sus extremos, transversalmenteal eje de un motor. En el otro extremo, se articula elsegundo brazo, el cual se encuentra libre sin ninguntipo de actuador o restriccion. El objetivo del controles, midiendo las posiciones de ambos brazos, estabili-zar el segundo de ellos en posicion vertical. El motorutilizado como actuador es de corriente continua, ali-mentado a traves de un puente H para lograr giros enambos sentidos. La velocidad es controlada medianteuna senal PWM. Los sensores utilizados para medir laposicion angular de ambos brazos son encoder incre-mentales de 1000 lineas por vuelta, lo que permite unaresolucion de 0, 09o. Para el control y medicion se uti-liza un microcontrolador tipo DSP, en el cual tambiense implementa una medicion de la corriente del motorutilizando uno de sus conversores A/D.
En ambos equipos, todas las senales son adquiridasy enviadas a la PC de forma asincronica, a traves de unpuerto paralelo en modo EPP. Las senales son procesa-das en el software PowerDEVS, donde se implementa
Figura 5: Pendulo invertido.
un sistema de control. La senal de control (porcentajede PWM y direccion, en el caso del pendulo) es de-vuelta al microcontrolador vıa puerto paralelo, el cualgenera la senal de alimentacion de los actuadores. Elprograma mencionado, corre sobre un sistema opera-tivo Linux Real-Time, mas especıficamente Kubuntu,con modulo RTAI.
3. 2. Esquema de muestreo
En ambos equipos se intento aproximar la tecnicade muestreo asincronico descrita en la seccion 2.1 uti-lizando un conversor analogico digital sincronico. Esdecir que se utilizo un conversor que adquiere mues-tras periodicamente para emular el comportamientodeseado. El metodo se basa en muestrear a muy altavelocidad (200 KSPS) y decidir si es pertinente infor-mar al sistema de control de un cambio en la variablede control. Toda la logica se implemento en el micro-controlador que gestiona la comunicacion con la PC, yse utilizo su conversor A/D para realizar el muestreo.
Para realizar la decision, el microcontrolador debemantener un registro del ultimo valor enviado a la PC,de manera de poder conparar las sucesivas medicionescon este. Si la diferencia entre el valor actual, y elultimo valor registrado es mayor a un umbral o cuanto(valor programable), se envıa una interrupcion a la PCvıa puerto paralelo, informando de una actualizacionde alguna de las mediciones.
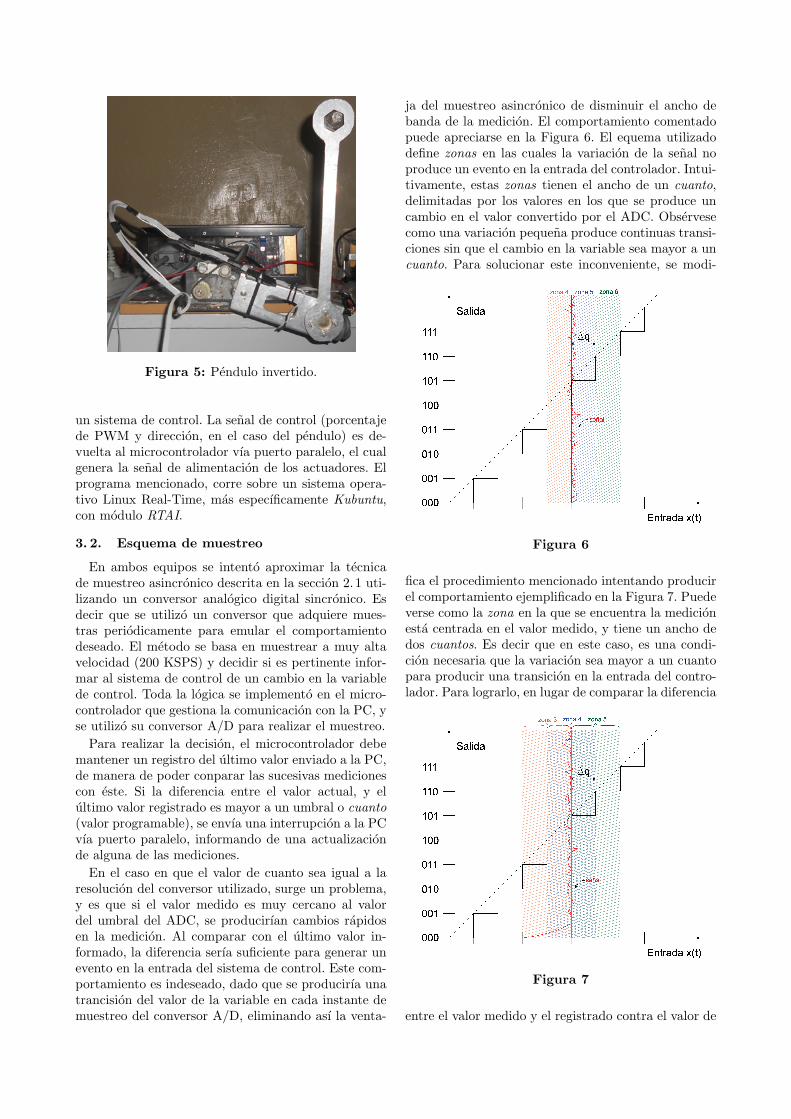
En el caso en que el valor de cuanto sea igual a laresolucion del conversor utilizado, surge un problema,y es que si el valor medido es muy cercano al valordel umbral del ADC, se producirıan cambios rapidosen la medicion. Al comparar con el ultimo valor in-formado, la diferencia serıa suficiente para generar unevento en la entrada del sistema de control. Este com-portamiento es indeseado, dado que se producirıa unatrancision del valor de la variable en cada instante demuestreo del conversor A/D, eliminando ası la venta-
ja del muestreo asincronico de disminuir el ancho debanda de la medicion. El comportamiento comentadopuede apreciarse en la Figura 6. El equema utilizadodefine zonas en las cuales la variacion de la senal noproduce un evento en la entrada del controlador. Intui-tivamente, estas zonas tienen el ancho de un cuanto,delimitadas por los valores en los que se produce uncambio en el valor convertido por el ADC. Observesecomo una variacion pequena produce continuas transi-ciones sin que el cambio en la variable sea mayor a uncuanto. Para solucionar este inconveniente, se modi-
Figura 6
fica el procedimiento mencionado intentando producirel comportamiento ejemplificado en la Figura 7. Puedeverse como la zona en la que se encuentra la medicionesta centrada en el valor medido, y tiene un ancho dedos cuantos. Es decir que en este caso, es una condi-cion necesaria que la variacion sea mayor a un cuantopara producir una transicion en la entrada del contro-lador. Para lograrlo, en lugar de comparar la diferencia
Figura 7
entre el valor medido y el registrado contra el valor de
cuanto, si esta diferencia es positiva se compara contrael valor de cuanto menos uno.
Para tener en cuenta posibles retardos en la respues-ta a la interrupcion desde la PC, se incorporo al equipola posibilidad de informar de una trancision mayor aun cuanto.
Naturalmente, esta es una aproximacion del com-portamiento de un conversor asincronico. La validezdel metodo depende de la relacion entre la frecuen-cia de muestreo del conversor sincronico y la velocidadde variacion de las senales medidas. En los casos ba-jo estudio, las variables a medir son principalmentemecanicas, por lo que 200 KSPS probo ser mas quesuficiente.
El esquema antes mencionado es utilizado para lamedicion de las variables analogicas. En el caso dela posicion de los brazos del Pendulo, esto no fuenecesario dado que los encoders son inherentementeasincronicos, ya que lo que se detecta son las tran-siciones en las senales del dispositivo. Igualmente, seimplementa para estas variables un esquema de me-dicion como el de las variables analogicas, de manerade evitar altas velocidades de cambio de la medicioncuando el eje del encoder oscila cercano a un punto detransicion.
3. 3. EPP
Se utilizo para la comunicacion, entre el microcon-trolador y la PC, el modo EPP del puerto paralelodebido a tres principales razones. En primer lugar da-da la alta velocidad que permite (2 MB/s); por otrolado dada la naturaleza bidireccional, permitiendo im-plementar un protocolo sencillo de comunicacion entreambas partes; y finalmente, debido a que el puerto po-see una linea de interrupcion. Esta ultima particula-ridad, combinada con la utilizacion del modulo RTAI,permite obtener tiempos de respuesta del orden de los10µs.
En concordancia con el esquema de muestreoasincronico, las interrupciones en el puerto paralelose realizan al producirse una transicion en alguna delas variables, de manera de generar un evento en laentrada del sistema de control.
3. 4. Bloque de PowerDEVS
Se desarrollo una librerıa en PowerDEVS para rea-lizar la comunicacion con el hardware implementado.En la Figura 8 puede apreciarse uno de los bloquesde dicha librerıa. Todos los bloques tienen la posibi-lidad de utilizarse tanto para el Levitador como parael Pendulo, seleccionandolo entre sus parametros deconfiguracion. Pueden verse las tres salidas, una paracada variable medida, y la entrada de la senal de con-trol (porcentaje de PWM). Las senales ADC1, ADC2y ADC3 se corresponden con distintas variables de-pendiendo del equipo empleado (posicion y corrientepara el levitador, corriente y angulos de los brazos parael pendulo), en la unidad correspondiente.
Figura 8: Bloque implementado enPowerDEVS para la comunicacion conel Hardware.
Pueden verse tambien 3 entradas de cuanto, lo quepermite variar dichos parametros en linea; en caso deno utilizarse dicha funcion, el valor por defecto puedeseleccionarse en la configuracion del bloque. Adicio-nalmente existen 3 entradas de resincronizacion utili-zadas para refrescar el valor de la medicion. En casode generarse un evento en estos puertos, se transmiteel valor absoluto de la variable pedida, desde el micro-controlador. A partir de la utilizacion de esta funcion,puede enmascararse la interrupcion del puerto parale-lo de manera de implementar un esquema de muestreosincronico.
Los puertos de salida dADC2 y dADC3 son utili-zados solo para el Pendulo, y entregan el valor de laderivada de la posicion de los brazos, calculadas dentrodel mismo bloque.
4. RESULTADOS
El objetivo del proyecto era la implementacion de losequipos, y no ası el desarrollo de controladores para losmismos. Es por esto que en ambos casos se utilizaroncontroles sencillos con el objetivo de probar el correctofuncionamiento de los experimentos en su conjunto.
Para el Levitador, puede verse en la Figura 9 el re-sultado de la implementacion de un controlador porganancia tabulada, en el cual se intenta estabilizar laesfera en una referencia constante. El perıodo inicial
Figura 9: Variables del Levitador pa-ra una referencia constante.
en el que la posicion no sigue a la referencia y la co-rriente y tension son elevadas, es el perıodo en el que elcontrolador eleva la esfera desde su posicion de reposo,en una base varios milımetros por debajo del valor deequilibrio deseado.
En la Figura 10 puede verse el mismo controladorpero para una posicion de referencia senoidal.
Figura 10: Variables del Levitadorpara una referencia senoidal.
Para el Pendulo invertido se implemento un contro-lador lineal por realimentacion de estados, en el que elobjetivo de control era estabilizar el segundo brazo enposicion vertical, y el primero apuntando hacia aba-jo. En la Figura 10 pueden verse los resultados. Puede
Figura 11
verse como la posicion del segundo brazo se mantienesiempre cercana al valor de equilibrio, mientras que lasvariaciones en la posicion del brazo 1 son consecuenciade perturbaciones introducidas adrede para probar eldesempeno del controlador.
5. CONCLUSIONES
En el presente trabajo se presentaron dos dispo-sitivos experimentales para la aplicacion de controlasincronico, una caracterıstica que no es comun ensistemas expreimentales. Se demuestra tambien que
es posible implementar un conversor analogico digi-tal asincronico sin necesidad de utilizar hardware es-pecıfico, siendo suficiente con un microcontrolador yun ADC de alta velocidad. Por lo que el costo no esmayor al de un muestreador sinconico.
Se probo que el PowerDEVS provee una plataformarobusta para la implementacion de controladores entiempo real. Y la aplicacion de tecnicas de control tipoQSC implementadas en dicho programa han probadosatisfactorias.
Se propone, como trabajo futuro, realizar una iden-tificacion mas exhaustiva de los modelos de las plantasdesarrolladas, de manera de disenar en base a estas es-trategias de control mas complejas.
Referencias
[1] E. Allier, G. Sicard, L. Fesquet, and M. Renau-din. Asynchronous level crossing analog to digitalconverters. Measurement, 37:296–309, 2005.
[2] J. M. Alvarez Leiva, A. E. Kaffman, and J. J. Ta-rrio. Diseno y construccion de equipos didacticospara control no lineal. Proyecto Final de Inge-nierıa Electronica. FCEIA, UNR., 2011.
[3] K.J. Astrom and B.M. Bernhardsson. Com-parison of Riemann and Lebesgue sampling forfirst order stochastic systems. In Proceedings ofthe 41st IEEE Conference on Decision and Con-trol, pages 2011–2016, Las Vegas, USA, December2002.
[4] C. Basabilbaso, J. Zuccolo, F. Bergero, andE. Kofman. Simulacion en Tiempo Real de Siste-mas de Control de Movimiento. In Proceedings ofRPIC 2009, Rosario, Argentina, 2009.
[5] F. Bergero and E. Kofman. Integracin del Simu-lador PowerDEVS con el entorno Scilab. In Pro-ceedings of RPIC 2009, Rosario, Argentina, 2009.
[6] F. Bergero and E. Kofman. PowerDEVS. A Toolfor Hybrid System Modeling and Real Time Si-mulation. Simulation: Transactions of the Societyfor Modeling and Simulation International, 2010.in Press.
[7] S. Dormido, J. Snchez, and E. Kofman. Mues-treo, control y comunicacin basados en eventos.Revista Iberoamericana de Automtica e Informti-ca Industrial (RIAI), 5(1):5–26, 2008.
[8] E. Kofman. Quantized-State Control. A Met-hod for Discrete Event Control of ContinuousSystems. Latin American Applied Research,33(4):399–406, 2003.
[9] E. Kofman and J. Braslavsky. Level CrossingSampling in Feedback Stabilization under Data-Rate Constraints. In Proceedings of CDC’06,IEEE Conference on Decision and Control, pages4423–4428, San Diego, 2006.
[11] M. Miskowicz. The event-triggered sampling opti-mization criterion for distributed networked mo-nitoring and control systems. In Proc. of the IEEEInternational Conference on Industrial Techno-logy, volume 2, pages 1083–1088, 2003.
[12] Biagini Pablo and Michlig Edgardo. Proyecto Fi-nal: Levitador Magnetico para Laboratorio. Tech-nical report, 2009.
[13] B. Zeigler, T.G. Kim, and H. Praehofer. Theoryof Modeling and Simulation. Second edition. Aca-demic Press, New York, 2000.