Page 1
Instruments for particle size and settling velocity observations insediment transport
Y.C. Agrawal*, H.C. Pottsmith
Sequoia Scienti®c, Inc., Westpark Technical Center, 15317 NE 90th Street, Redmond, WA 98052, USA
Received 21 May 1999; accepted 20 March 2000
Abstract
In this paper we describe two sensors for measurement of particle size-distribution and settling-velocity distribution. These
measurements are critical to the correct estimation of the true sediment concentration in the ®eld, as well as to evaluating
models for transport rates of sediments. A multi-angle measurement of laser scattering is made and inverted to obtain the
particle size distribution. Since small-angle scattering is relatively insensitive to particle composition, the size distribution
measurements are robust, and do not require particle refractive index. It is shown that with a knowledge of the size distribution,
true particulate volume concentration can be obtained, unaffected in calibration by changes in particle size distribution. The
data from bottom boundary layer experiments using the instrument show the presence of temporal variability in size distribution
associated with the strength of forcing of the boundary layer. The importance of these observations lies in the implication that
historical data acquired with single-parameter optical or other sensors needs to be revisited. In the second instrument, analyzing
the observation of size distributions during settling in a settling column produces settling velocity estimates. In this case, the
history of concentration of each size class is examined to determine the settling velocity, without invoking any assumptions of
settling regime. Settling velocity data from a ®eld experiment off the New Jersey coast ®t the model: wf;n � 0:45 £ 1023 a1:2n :
where an is radius in microns and settling velocity is in cm/s. q 2000 Elsevier Science B.V. All rights reserved.
Keywords: Sediment transport; Settling velocity; Laser diffraction
1. Introduction
We introduce the present instruments by ®rst
describing the quantities needed for studies in sedi-
ment transport. This is followed by a survey of the
state-of-the-art of instrumentation preceding this
work. We then review the principles of laser diffrac-
tion that underlies the two instrument systems
described in this paper. We present this description
with suf®cient rigor, such that a reader may discern
all steps in the process and follow the mathematical
details. Subsequently, we describe the instruments,
the laboratory veri®cation and calibration procedures.
Field data from each instrument is presented. The
focus in this paper is on instrumentation, so that we
leave a detailed description of scienti®c ®ndings to
subsequent papers.
For the sediment transport scientist, the governing
equations relating sediment distribution to hydro-
dynamics are the combination of the boundary layer
equations, and the equation for sediment mass con-
servation. When sediment concentrations are small,
the equations for ¯uid motions and for particles
Marine Geology 168 (2000) 89±114
0025-3227/00/$ - see front matter q 2000 Elsevier Science B.V. All rights reserved.
PII: S0025-3227(00)00044-X
www.elsevier.nl/locate/margeo
* Corresponding author. Fax: 11-425-867-5506.
E-mail address: [email protected] (Y.C. Agrawal).
Page 2
de-couple. In this case, sediment distribution is
described, in its simplest one-dimensional form by:
Cn;t 1 wf;nCn;z � �KCn;z�z �1�where Cn is the volume concentration of the nth size
class, wf,n is the fall velocity for the nth size class, K is
eddy viscosity, and subscripts t and z denote differen-
tiation with respect to time t and vertical coordinate z,
respectively. Thus the ®rst requirement for sediment
observations is for the concentration by sizes Cn. The
second is the fall velocity by sizes wf,n. Model testing
of Eq. (1) for the concentration distribution Cn�z�requires the eddy viscosity K and a bottom boundary
condition for Cn�z�: The literature on solution of the
hydrodynamics to solve for K is rich (e.g. the survey
by Wiberg (1995). The third quantity necessary to
solve the equation is the bottom boundary condition,
i.e. Cn at some reference height zr. For this bottom
boundary condition, a widely used formulation is
based on the work of Smith (1977) which speci®es
the concentration of sediments at a reference
heightÐthe reference concentration. Due to the
vast array of factors in¯uencing sediment proper-
tiesÐsediment size distribution, biological cohesive-
ness, bedforms, wave-directional spread etc.Ðthe
speci®cation of the `reference concentration' remains
one of the most intractable problems in sediment
transport. Measurements provide an empirical, site-
speci®c approach for advancement. This application
requires the measurement of size speci®c concentra-
tion Cn at a small distance above the sea¯oor.
1.1. Prior sensors for sediments
In most cases, suspended sediment `concentration'
has been estimated via one parameterÐoptical trans-
mission (Moody et al., 1987), optical backscatter
(Downing et al., 1981), or acoustic scattering cross-
section (Crawford and Hay, 1993; Lynch et al., 1994;
Thorne and Hardcastle, 1997). These are all one-para-
meter sensors, where a single parameter represents the
sediment concentration. A one-parameter sensor
necessarily obtains a weighted sum of the concentra-
tions of underlying size classes. For example, optical
transmission or backscatter sensors estimate approx-
imate (not exact) total particle cross-sectional area. In
contrast, acoustic sensors, usually operating in the
Rayleigh regime (i.e. when the insonifying acoustic
wavelength l a is of the same order or greater than the
particle diameter, i.e. kaa , 1 where ka � 2p=la)
respond to the sum of the squares of particle volumes.
For particles of 1 mm diameter or smaller, this condi-
tion is satis®ed at acoustic frequencies of 1 MHz or
lower. Thus, neither of these sensors simply sum the
mass or volume concentrations to provide the needed
measure of Cn or the total concentrationP
Cn. For this
reason, unless the particle size distribution is invariant
in space and time, the calibration of these single-para-
meter sensors in laboratories before ®eld usage, while
a common practice, is of limited value. An unfortu-
nate consequence of the use of such calibrations is the
absence of error bounds in the interpretation of data. It
is likely that historical data with these unknown errors
in estimating concentration are, in part, responsible
for some of the large variability in predictive
capability of sediment transport models. Regardless,
the power of multi-frequency acoustics to provide
range-gated sand concentration ®eld is to be
recognized as signi®cant for nearshore sediment
observations.
To estimate the multi-valued size-distribution Cn, a
multi-parameter sensor must obviously be employed.
Multi-frequency acoustics appear to offer attractive
advantages, e.g. their line-of-sight, range-gated
synoptic capability. However, probing a wide
dynamic range of particle sizes requires a similarly
large range of frequencies in a multi-frequency
system. This constitutes a practical restriction in use.
Hay and Sheng (1992) have used acoustic sizing with
a 3-frequency system, assuming an underlying log-
normal particle size distribution. They reported esti-
mates of sand concentrations. The technique could not
reach small sizes of order 10 mm due to the require-
ment for frequencies well above 10 MHz to get suf®-
ciently short acoustic wavelengths. Sound at the high
frequencies necessary to achieve wavelengths of say
100 mm (e.g. 15 MHz) attenuates very strongly in
water, making range penetration severely limited.
Thus there exists a mismatch between the size range
of naturally suspended sediments and the ability to
produce small acoustic wavelengths needed to
measure these ®ne particles. Nonetheless, acoustics
have contributed much to our knowledge of sediment
distributions in boundary layers.
In contrast to the multi-frequency acoustic
approach of Hay and Sheng (1992), optics afford a
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±11490
Page 3
capability to observe a wider range of particle sizes,
although without the bene®t of range-gated pro®ling.
By measuring optical scattering over a wide dynamic
range of angles (the dynamic range is de®ned here as
the ratio of maximum to minimum scattering angle), a
multi-parameter measurement is obtained with infor-
mation content on a correspondingly large dynamic
range in particle sizes. The angular dynamic range is
typically 100:1 or 200:1 so that size ranges from, say,
1±200 mm can be studied with a single instrument.
This principle is called laser diffraction. The name
derives from the approximation to the exact solution
to Maxwell's equations describing light scattering by
spheres. The exact solution for homogeneous spheres
of arbitrary size, due to Mie, (Born and Wolf, 1975),
has the property that for large particles, i.e. when the
real part m of the complex refractive index, and parti-
cle size ka (k being 2p=l; l is optical wavelength) are
such that �m 2 1�ka q 1; the scattering at small
forward angles appears nearly identical to the diffrac-
tion through an equal diameter aperture (Born and
Wolf, 1975; Swithenbank et al., 1976). An even
more signi®cant observation is that under these condi-
tions, as small angle scattering is dominated by
diffraction, the light that passes through the particle
does not affect the small angle measurement.
However, only the light passing through the particle
experiences the particle refractive index (i.e. compo-
sition); hence, the refractive index of particles
becomes largely irrelevant. This implies that particle
composition, or for that matter, possibly particle inter-
nal structure and homogeneity, are of little to no
consequence. As the particle composition does not
determine its scattering characteristics, the method
is fully general for particle sizing. It is for this reason,
that this has become the most widely used particle
ensemble sizing method, employed for measuring
diverse types of particles, including cements, choco-
lates or microbes.
The ®rst underwater instrument based on laser
diffraction was developed by Bale and Morris
(1987). They adapted a commercial laboratory instru-
ment manufactured by Malvern Instruments of UK for
ocean use. They have presented results from estuarine
particle sizing (Eisma et al., 1996). Recently, a team
of French scientists has employed a submersible
instrument manufactured by CILAS (Gentien et al.,
1995). In both these cases, the precise mathematical
algorithm used to convert the observed angular scat-
tering distribution to particle size distribution was not
revealed. The present authors originally employed a
different design. Multi-angle scattering was observed
using a CCD line array photo-detector (Agrawal and
Pottsmith, 1994). Whereas successful, the use of
CCDs unnecessarily required long averaging times
to remove the in¯uence of laser speckle, and also
required complex, fast electronics. For these reasons,
in this work we have also migrated to the discrete
circular ring detectors (see later) that are commonly
used in commercial laboratory instruments. The
instruments described in this paper, in contrast to
those of Bale and Morris and Gentien et al. mentioned
above, are autonomous, battery-powered, and are
equipped with a computer and memory for data
storage.
Of the two instruments that are the subject of this
paper, the ®rst instrument, LISST-100 (LISST is acro-
nym from Laser in-situ Scattering and Transmissome-
try) obtains the size distribution on a programmable
schedule up to a year, but is typically restricted to a
shorter duration by bio-fouling of windows. The
second instrument described here, LISST-ST, obtains
the settling velocity for 8 size classes in the 5±
500 mm range.1 Natural particles are known to exhibit
settling velocities that are dependent not just on size
but also on composition, which is generally poorly
quanti®ed. In the laboratory, siliceous particles have
been studied commonly to evaluate the validity of
Stokes' law. An exhaustive study of the settling velo-
city of particles in the laboratory was reported by
Dietrich (1982). He offered a review of literature
and synthesized the settling velocity data in dimen-
sionless form. His work con®rms the validity of
Stokes settling at low Reynolds numbers, though
when the particle shape departs signi®cantly from
spheres, as with ®bers, the settling velocity formula-
tion requires a correction factor. It can be shown that,
according to Stokes law, the settling velocity in water,
wf,n (in cm/s) is related to particle size am (expressed in
microns), and speci®c density s as:
wf;n � 0:22 £ 1023�s 2 1�a2m �2�
At Reynolds number Re � 2awf;n=n in the vicinity of
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114 91
1 More recent instruments cover the range 1.2±250 mm, or 2.5±
500 mm.
Page 4
1, based on ¯uid viscosity n , particle diameter 2a, and
fall velocity wf, the fractional increase to the drag
coef®cient under Oseen ¯ow is [3/16]Re. At still
higher Reynolds numbers additional drag on particles
reduces the exponent still further, eventually reaching
a value of 0.5 for fully turbulent ¯ow (Dietrich, 1982).
Because much of the suspended material in water is
expected to fall by Stokes' law, it is worth considering
the consequence of particle sizes on vertical distribu-
tion of particles. For example, within the inertial
region of a boundary layer, a linear dependence of
eddy viscosity on distance from the sea¯oor produces
a vertical distribution, related to that at a reference
height zr, of the form:
Cn�z� � Cn�zr��z=zr�2wf;n=kup
where k is the von Karman's constant �k � 0:41� and
up is the friction velocity, de®ned as usual, with stress
tw and water density r as: up � �tw=r�1=2: Since the
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±11492
Fig. 1. (a) Basic optical geometry shows laser, optics and detectors. The details of the ring-detector are shown; the edge view of the ring
detector shows the location of the photodiode behind the ring -detector. This photodiode senses the optical transmission. (b) Scattering
signature of particle size: large sizes put their maximum scattering at small rings and vice versa.
Page 5
fall velocity for particles in the Stokes regime scales
with the particle radius squared, it is seen that
Cn�z� / z2ba2
; b � 0:22 £ 1023�s 2 1�=�kup� �3�
The square of particle radius in the exponent has these
implications: First, the size distribution of suspended
particles can be expected to be a strong function of
particle diameter. This is borne out by experience, in
that coarse sand hugs the bed and is transported prin-
cipally as bedload, whereas ®nes are mixed relatively
well and transport as suspended load. Second, when
ba2 is of order one, from Eq. (2), the exponent of z in
Eq. (3) can produce large errors in estimating concen-
trations from small errors in the knowledge of particle
size. In energetic oceanic situations kup is of order 1,
so that size-related vertical variation may be strongest
for siliceous particles of diameter near 30 mm and
above. In ®eld observations to be presented in subse-
quent papers, we shall show clear evidence of this
strong vertical gradient in concentrations of the larger
particles.
A substantial scienti®c effort continues to be
expended in the estimation of in-situ settling veloci-
ties of particles, especially of marine aggregates,
(Fennessy et al., 1994; Jones and Jago, 1996; Puls
and Kuhl, 1996; Van Leussen, 1996), and a compar-
ison of the several research devices is presented by
Dyer et al. (1996). Much of the work for measuring
settling velocities is surveyed by Hill et al. (1994),
who developed their own settling device Remote
Optical Settling Tube, ROST. In the present work
on measurement of settling velocities, the size is
measured as the equivalent optical sphere. Thus,
unlike all prior sensors, no assumption on particle
density is necessary. For determining the settling
velocity, particles are trapped in a settling column.
As the particles of any size-class settle through the
length of the settling column L and then disappear
over time TB, the concentration history of each size
class is employed to estimate the settling velocity
simply through wf;n � L=TB: In this manner, one
obtains the settling velocity for as many size classes
as can be resolved optically.
Among the capabilities of the instruments
described in this paper is their ability to self event-
trigger. Using the built-in pressure and temperature
sensors, a data schedule can be programmed which
adapts to tides, surface waves, storms (using pressure
or pressure variance) or fronts (temperature gradi-
ents). For example, in this paper, by high-pass ®ltering
the pressure record with samples at 15 min intervals,
we show estimates of surface gravity waves. Also, the
measurement of optical transmission is included as a
necessary auxiliary parameter for the size distribution
measurement, so that these instruments add to the
capabilities of the widely used optical transmissometer.
2. Laser diffraction principles
The signature of particle size is described in simple
physical terms next. For the geometry of Fig. 1a,
consider the scattering of collimated laser light by
small particles as detected by a specially constructed
detector. The detector is placed at the focal plane of a
receiving lens of focal length f. All rays originating
from a scatterer at a particular angle u to the lens
optical axis reach a point on the focal plane at a radius
r � fu: The radii of the detector rings increase loga-
rithmically. Thus each ring on the detector represents
a small range of logarithmically increasing scattering
angles. The ring detector is shown in the inset, which
also shows the hole at the center of the rings. The
main laser beam passes through this hole and is
detected by a photo-diode placed behind the ring
detector. This provides the optical transmissometer
function. It can be seen that the scattered light sensed
by the rings undergoes attenuation. It is to correct for
this attenuation, that the transmissometer photodiode
behind the hole in the ring detector has been
employed. Fig. 1b shows the scattering signature,
per unit area of particles of two distinct sizes, across
these detector rings. The scattered optical power due
to large particles peaks at small angles (inner rings),
and vice versa. Since the magnitude of scattering is
linear with particle numbers, the total optical power2
distribution sensed by the detector rings is simply the
sum of the contributions from each size class,
weighted by the concentration in that size class.
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114 93
2 The use of the term energy is frequently encountered in particle
sizing literature with the laser diffraction method. Strictly speaking,
the photosensors respond to optical power in W/m2. The use of the
term energy is probably explained by the implied integration of
optical power in angles. We choose the rigorous term power
throughout this paper.
Page 6
Thus, the optical power distribution on the ring detec-
tor constitutes the essential information on particle
size distribution. The conversion of this power distri-
bution to size distribution involves a mathematical
inverse. The procedure employed by us is described
in Appendix A. We note in passing that the small-
angle scattering thus measured by the instrument is
a representation of the optical volume scattering func-
tion (VSF). This quantity is of interest in underwater
light propagation.
The range of sizes of particles that can be observed
by this system is established as follows. The largest
observable particles are those that put the peak of their
scattering at the innermost detector ring. Similarly,
the smallest observable particles are those that put
their power maximum at the largest rings. Since the
rings are logarithmic in radii, thus arranged for math-
ematical reasons, and since it is obvious that the size
classes be chosen so that each size class corresponds
to a matching ring, it follows that the size classes are
also separated in a logarithmic order. Furthermore, as
each ring itself observes scattering over a small sub-
range of angles, it follows that each ring also observes
a sub-range of particle sizes. The inner radius of a ring
corresponds to the largest particles, whereas the outer
radius of the ring corresponds to the smallest particles
in the corresponding size sub-range, or size class. The
relationship between the center of each size class ac
and the corresponding center of the matching detector
ring u c is related to the optical wave vector k, as:
kacuc � bopt �4�We have selected the constant b opt to be 2; (for details,
cf. Agrawal and Pottsmith, 1993). For example, if the
minimum angle at which scattering is observed is
0.85 mrad, the largest diameter of particles that can
be observed with a 0.67 nm wavelength laser is
500 mm.
The inversion of power distribution sensed by the
rings produces area distribution of particles (see
Appendix A). From the area distribution, the volume
distribution of particles is obtained by simply multi-
plying the area in any size class by the median
diameter in that size class. The total volume concen-
tration in the sample can be obtained by summing this
volume distribution. In this manner, the true total
particle concentration of particlesP
Cn is obtained,
regardless of particle density or size distribution. It
also follows that since the size distribution is
measured, the calibration of the measurement of
total suspended volume of particles is not affected
by a change in size distribution of the particles. The
instruments can be tested to this standard in the
laboratory, where sphericity and homogeneity of
particle composition is easily assured. A crucial test
of this idea is to examine experimentally, if the rela-
tionship between known volume concentration in a
laboratory preparation, and the reported concentration
falls on a common single straight line for different
particles and suspensions. We present such data
later in this paper. Now, the ratio of the total particle
volume to the total particle area is de®ned as Sauter
Mean Diameter, SMD. Thus, the data permit an esti-
mation of SMD also. Last, from the mismatch in the
scattered power distribution data and the ®t of the
inverse, one has an estimate of the error in the size
distribution.
We have deliberately insisted on the use of the term
`volume concentration' in this work, rather than mass
concentration, as the quantity delivered by laser
diffraction instruments. This is to emphasize that
neither this nor any of the other methods mentioned
earlier obtains any information about particle mass
density. However, the uncertainty in mass density of
particles is only of about a factor of 3 (density for
silica being 2.8, and for biogenous particles, nearly
1). In contrast, the errors due to imprecise knowledge
of size can reach far greater magnitudes as sizes in
nature vary far more widely than by a factor of 3.
Finally, whereas the calibration of laser diffraction
methods is largely insensitive to particle composition,
small errors can be expected to arise depending on
particle refractive index. The errors become signi®-
cant when the refractive index of natural particles is
vastly different from that used in the computation of
the scattering matrix. The use of the correct forward
matrix, computed for the correct refractive index of
particles can remove this dif®culty. However, in
nature, the refractive index of scatterers is usually
not known. Thus there remains a need to examine
the present instruments in the ®eld.
3. LISST-100
In Fig. 1, we show the optical schematic common to
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±11494
Page 7
the two instruments described in this paper. A 10 mW
diode laser is used as the light source. This 670 nm
laser is coupled to a single-mode (SM) optical ®ber
(not shown). SM ®ber is used because it preserves the
wave-front purity of the exiting light and also because
SM ®bers enable the tightest possible beam collima-
tion. The SM ®bers are angle-polished at the entrance
and exit, in order to suppress back-re¯ection that
cause instability of the laser. At the SM ®ber exit, a
pure, single transverse mode beam emerges. This is
coupled to an achromatic collimating lens. Achromats
are used because they are also corrected for spherical
aberration. Following collimation, a beam-splitter
directs a small portion of the laser power to a refer-
ence beam detector. This reference detector is chosen
to be of identical optical responsivity (amperes/watt,
A/W) to the one placed behind the ring detector. Its
purpose is to detect any drifts in laser power entering
water that may arise due to long-term variations of
laser characteristics or laser-®ber coupling ef®ciency.
Such changes may also occur due to temperature
changes or mode-hopping of the laser. The reference
beam power is sensed and stored with each record of
the scattering data. The measurement is used to
normalize out effects of laser power drifts.
Following collimation, the laser optical path folds
and exits a small window into water. The beam
diameter in water is 6 mm and the optical path in
water is 5 cm. Longer or shorter path may be dictated
by the range of optical conditions to be encountered in
any experiment. The laser beam illuminates particles
in water and then reenters the pressure housing
through a larger window. These two windows, being
in the optical train, are polished to a very high degree
and the air-sides are anti-re¯ection coated. The direct
beam now focuses to a waist at the focal plane where
the ring-detector is placed. This detector has 32
logarithmically placed rings. The inner radius of the
smallest ring is 102 mm and the outer radius of the
largest ring is 10 mm (20 mm in newer instruments).
At the center of the ring detector exists a laser-drilled
hole to pass the direct beam through the silicon. The
transmitted beam power is sensed with a silicon
photo-diode placed behind the ring detector. This
photo-diode constitutes the optical transmissometer
function. The overall sensitivity of the ring detectors
is 2.44 nA per digital count. With a typical silicon
responsivity of 0.4 A/W, this implies an optical
power resolution of nearly 6 nW. The ampli®ers
have a 3 dB low-pass cut off at 10 Hz. The low
bandwidth is employed to reduce shot-noise of
optical detection (Yariv, 1988). Overall electronic
noise is less than one count The fastest rate at
which scattering distributions can be acquired is
5 Hz, limited only by the low-power data-acquisi-
tion computer.
The ampli®ed outputs of the ring detectors in all
instruments are stored in memory on board the
computer controlling each instrument. A typical data
record consists of the following: 32 ring outputs, laser
power transmitted through the water, battery voltage,
one external channel, reference laser power, pressure,
temperature, and two auxiliary parameters (generally
time counters, e.g. hour and minutes). Each data word
is a 2 byte, 12 bit sample. The on-board computer is
programmable to take scattering distribution samples
at any arbitrary schedule, but not at a higher than 5 Hz
rate. For all cases, a background scattering distribu-
tion is measured and stored. The source of this scatter-
ing is micro-roughness on optics. This background is
termed zscat. It is shown in Appendix A that the
measured data from particles is attenuated by the
factor t � exp�2cl� in accordance with Beer's law,
where c is the beam attenuation per meter and l is the
optical pathlength, l � 5 cm: The attenuation is esti-
mated from the ratio t � T=T0; where T is transmitted
power, normalized by its value T0 when the back-
ground measurement is made using highly ®ltered
pure water. The corrected scattering from a sample
of water is then obtained as (see Appendix A for
details):
s � � �d=t�2 zscat �5�where �d is the 32-element scattering distribution
vector as recorded from a sample containing parti-
cles under measurement, and the quantities s, �d
and zscat are in digital counts. The vector s is
then corrected for the non-ideal detector respon-
sivity correction factor �D (explained below) to
produce a fully corrected scattering distribution
S, still in digital counts:
S�i� � s�i� �D�i� �6�From this ®nal corrected scattering, the volume
distribution is constructed as an inverse, INV(S),
(see Appendix) which upon division by the volume
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114 95
Page 8
conversion constant Cv (see below) yields the ®nally
desired quantity, volume concentration:
Cn � INV�S�=Cv �7�This is the desired quantity of Eq. (1).
3.1. Detector calibration
Two categories of calibrations are performed. The
®rst is to measure the overall sensitivity of the elec-
tronics and to determine the overall responsivity of the
detector. The detector ring inner and outer radii r
follow the geometric dimensions as follows: ri �r1r
i21 and r0 � rri where r � D1=32 and D is the
dynamic range of the detectors, i.e. D � umax=umin:
D1 is 100 for the LISST-100 (200 in newer detectors).
This de®nes detector areas. A uniform light ®eld is
produced with an incandescent lamp and a diffuser.
The ring detector is placed in this ®eld and the output
of each of the 32 rings is recorded after ampli®cation.
Ideally, the areas of each ring should be r 2 times the
previous inner ring. In a uniform light ®eld, the photo-
currents should follow this trend. Departures from this
trend are saved as the combined detector-electronics
gain compensation vector �D used in Eq. (6).
3.2. Overall volume concentration calibration
A mixture of known volume concentration of parti-
cles, V0, is prepared. The background scattering distri-
bution from ®ltered water, zscat, and the scattering
distribution from the suspension are recorded. The
quantity S is computed as in Eq. (6) above. Finally,
the volume conversion factor Cv is determined from:
Cv � �SINV�S��=V0 �8�It is essential that to be consistent with the presenta-
tion above, Cv be constant, regardless of the particles
being examined so long as they are within the range of
measurable sizes. The veri®cation of the constancy of
Cv, regardless of particle size distribution is described
below.
3.3. Laboratory tests
The objects of the laboratory tests are three-fold.
They are to determine: (i) if, given scattering data
from a known-size particle suspension, the instru-
ments retrieve it correctly; (ii) if, given a distribution
of sizes present in a standard suspension, the instru-
ments retrieve this size distribution from the data; and
(iii) whether, regardless of the size distribution of
particles used, the instrument retrieves the correct
total concentration,P
Cn, of particles in a suspension.
The ®rst tests were carried out using single-size
30 mm polystyrene spheres, obtained from Duke
Scienti®c, Inc. (Palo Alto, California). The index of
refraction of the polystyrene is 1.596; that for glass is
1.5. The forward matrix is computed for an index of
1.5 corresponding to glass, and is intended for
general-purpose use for natural siliceous particles.
Scattering signature of the 30-mm spheres is
shown in Fig. 2a and the size distribution is shown
in Fig. 2b. The two inversions shown in Fig. 2b are
based on two different methods: a model-independent
method and a best ®t SM lognormal or Gaussian
form. Note that the two methods are generally
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±11496
Fig. 2. (a) Scattering signature of single-size (30 mm) particles; data collected with the 32-ring LISST detector. (b) Volume distribution
constructed with 2 methods: -´- is the model-independent method, solid line is log-normal best ®t distribution.
Page 9
consistent, although the assumed lognormal form
inverse is narrower and therefore offers better
resolution. When there is a priori knowledge of
a distribution being narrow, an assumed form
method can be applied.
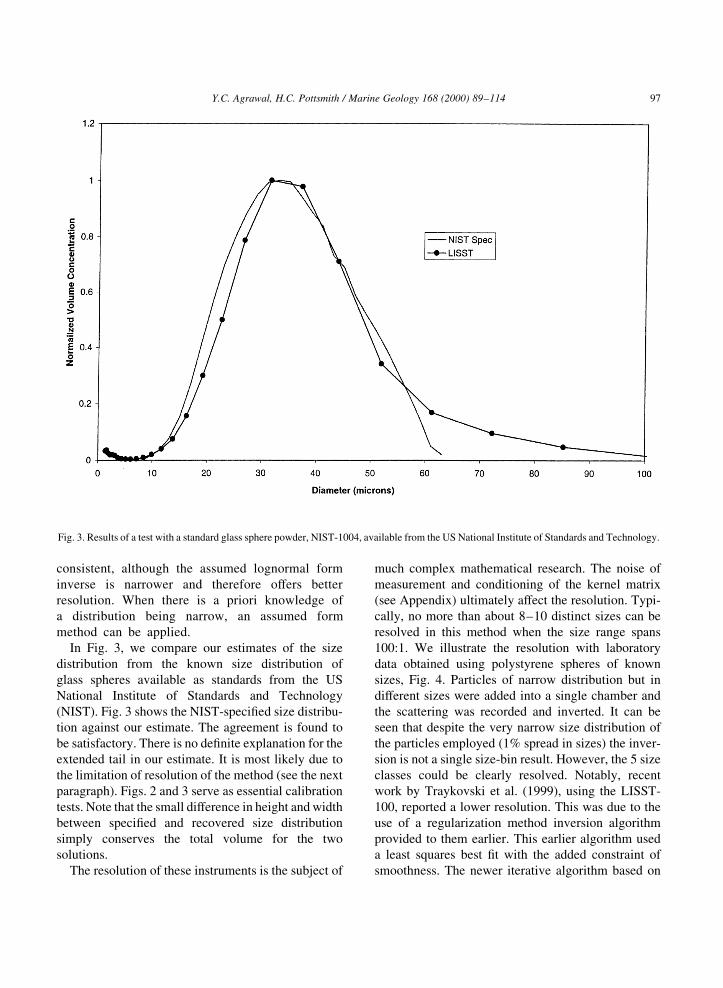
In Fig. 3, we compare our estimates of the size
distribution from the known size distribution of
glass spheres available as standards from the US
National Institute of Standards and Technology
(NIST). Fig. 3 shows the NIST-speci®ed size distribu-
tion against our estimate. The agreement is found to
be satisfactory. There is no de®nite explanation for the
extended tail in our estimate. It is most likely due to
the limitation of resolution of the method (see the next
paragraph). Figs. 2 and 3 serve as essential calibration
tests. Note that the small difference in height and width
between speci®ed and recovered size distribution
simply conserves the total volume for the two
solutions.
The resolution of these instruments is the subject of
much complex mathematical research. The noise of
measurement and conditioning of the kernel matrix
(see Appendix) ultimately affect the resolution. Typi-
cally, no more than about 8±10 distinct sizes can be
resolved in this method when the size range spans
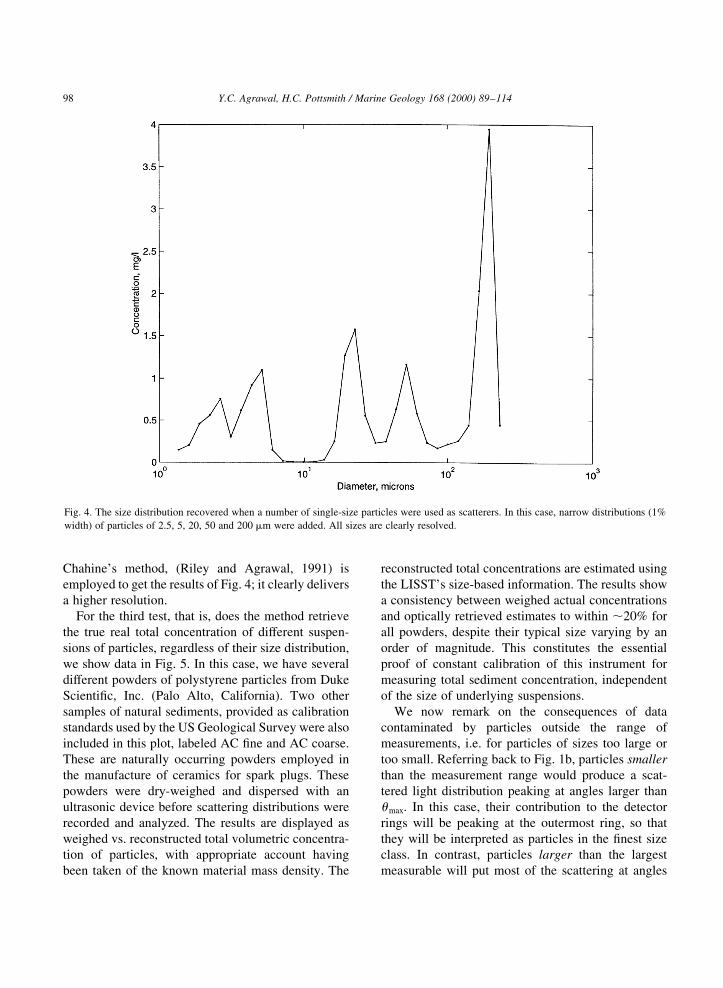
100:1. We illustrate the resolution with laboratory
data obtained using polystyrene spheres of known
sizes, Fig. 4. Particles of narrow distribution but in
different sizes were added into a single chamber and
the scattering was recorded and inverted. It can be
seen that despite the very narrow size distribution of
the particles employed (1% spread in sizes) the inver-
sion is not a single size-bin result. However, the 5 size
classes could be clearly resolved. Notably, recent
work by Traykovski et al. (1999), using the LISST-
100, reported a lower resolution. This was due to the
use of a regularization method inversion algorithm
provided to them earlier. This earlier algorithm used
a least squares best ®t with the added constraint of
smoothness. The newer iterative algorithm based on
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114 97
Fig. 3. Results of a test with a standard glass sphere powder, NIST-1004, available from the US National Institute of Standards and Technology.
Page 10
Chahine's method, (Riley and Agrawal, 1991) is
employed to get the results of Fig. 4; it clearly delivers
a higher resolution.
For the third test, that is, does the method retrieve
the true real total concentration of different suspen-
sions of particles, regardless of their size distribution,
we show data in Fig. 5. In this case, we have several
different powders of polystyrene particles from Duke
Scienti®c, Inc. (Palo Alto, California). Two other
samples of natural sediments, provided as calibration
standards used by the US Geological Survey were also
included in this plot, labeled AC ®ne and AC coarse.
These are naturally occurring powders employed in
the manufacture of ceramics for spark plugs. These
powders were dry-weighed and dispersed with an
ultrasonic device before scattering distributions were
recorded and analyzed. The results are displayed as
weighed vs. reconstructed total volumetric concentra-
tion of particles, with appropriate account having
been taken of the known material mass density. The
reconstructed total concentrations are estimated using
the LISST's size-based information. The results show
a consistency between weighed actual concentrations
and optically retrieved estimates to within ,20% for
all powders, despite their typical size varying by an
order of magnitude. This constitutes the essential
proof of constant calibration of this instrument for
measuring total sediment concentration, independent
of the size of underlying suspensions.
We now remark on the consequences of data
contaminated by particles outside the range of
measurements, i.e. for particles of sizes too large or
too small. Referring back to Fig. 1b, particles smaller
than the measurement range would produce a scat-
tered light distribution peaking at angles larger than
umax. In this case, their contribution to the detector
rings will be peaking at the outermost ring, so that
they will be interpreted as particles in the ®nest size
class. In contrast, particles larger than the largest
measurable will put most of the scattering at angles
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±11498
Fig. 4. The size distribution recovered when a number of single-size particles were used as scatterers. In this case, narrow distributions (1%
width) of particles of 2.5, 5, 20, 50 and 200 mm were added. All sizes are clearly resolved.
Page 11
smaller than umin. A `leakage' will now result primar-
ily at the smallest, inner rings, thus these particles will
be interpreted as additional large particles. It might
thus be expected that whenever particles outside the
measurable range are present, their scattered power
would leak into the nearest size particles that are
within the range of measurement. However, in these
cases, the method fails to maintain correct calibration
for total suspended concentration.
3.4. Small scale turbulence and small number
statistics at large particle sizes
The theory of turbulence predicts that passively
advected scalars (e.g. particle concentration) exhibit
small scale structure similar to ¯uid motions. In other
words, variability of Cn can be expected at scales
down to micro-scales. The laser beam in Fig. 1a
crosses several such structures, effectively integrating
the concentration along a line of ®nite thickness. Thus,
the observed particle concentration will exhibit noise-
like random variations caused by the small-scale
structure within the laser beam. Furthermore, just as
velocity averaging times must take into account the
integral time scales for velocity (given by z=U), so also
to obtain true mean concentration of particles, aver-
aging of concentration over several integral time
scales is necessary.
An unfortunate consequence of the relatively small
sample-volume dimensions of the laser diffraction
instruments (typical volume is 2 cm3) is that when
the number density of particles is small, as is typical
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114 99
Fig. 5. The relationship between known and measured total concentration of suspended particles for several different powders. A single linear
®t indicates the independence of calibration from size-distribution. At high concentrations, departure from the 1:1 line arises when beam
transmission drops below about 30%, i.e. as multiple-scattering effects become increasingly signi®cant.
Page 12
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114100
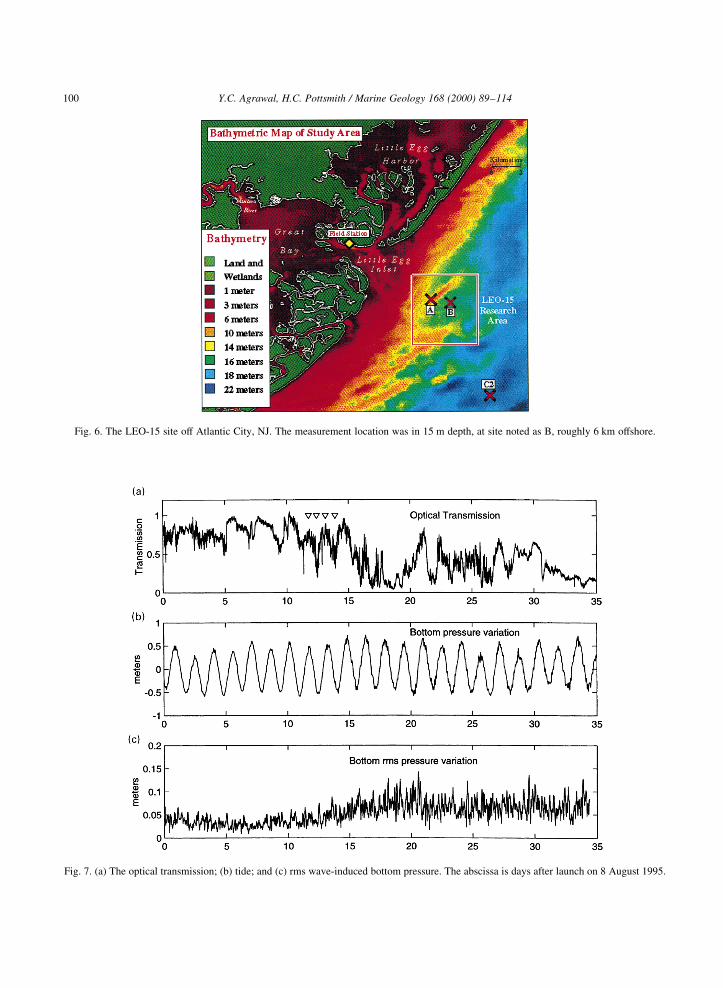
Fig. 6. The LEO-15 site off Atlantic City, NJ. The measurement location was in 15 m depth, at site noted as B, roughly 6 km offshore.
Fig. 7. (a) The optical transmission; (b) tide; and (c) rms wave-induced bottom pressure. The abscissa is days after launch on 8 August 1995.
Page 13
for the largest particles (e.g. ¯ocs or marine
aggregates), statistical variability of the particle
number in the sample volume itself becomes large.
In interpreting ®eld data, it is important to bear this
in mind. Of course, averaging over several scans, in
effect, increases the sample volume size and thereby
reduces this variability.
3.5. Field tests
We illustrate data from a ®eld experiment carried
out on the New Jersey coast at the LEO-15 Observa-
tory maintained by the National Undersea Research
Program. The program is funded by the US National
Oceanic and Atmospheric Administration (NOAA).
Fig. 6 shows the location of the experiment, which
is roughly 4 miles offshore, east±northeast of Atlantic
City, New Jersey. The water depth is 15 m and the
topography is a dynamic ®eld of sand ripples. In this
bottom boundary layer experiment, a suite of instru-
ments was placed to record currents, bottom topogra-
phy, and suspended sediment concentration and size
distributions. The data that we have selected will illus-
trate the point that the size distribution responds to
local forcing through resuspension, so that as the
forcing weakens, so does the concentration of the
larger size classes.
Two LISST-100 instruments were placed on a
single tripod in this experiment at the LEO-15 site.
The two instruments were placed at heights-above-
bed of 0.3 and 1.5 m. The optical transmission and
pressure measured by the auxiliary sensors on the
LISST (showing tides) during the experiment are
shown in the top two panels of Fig. 7. On the bottom
panel, we show the pressure variance as an indication
of surface wave activity. The pressure signal on the
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114 101
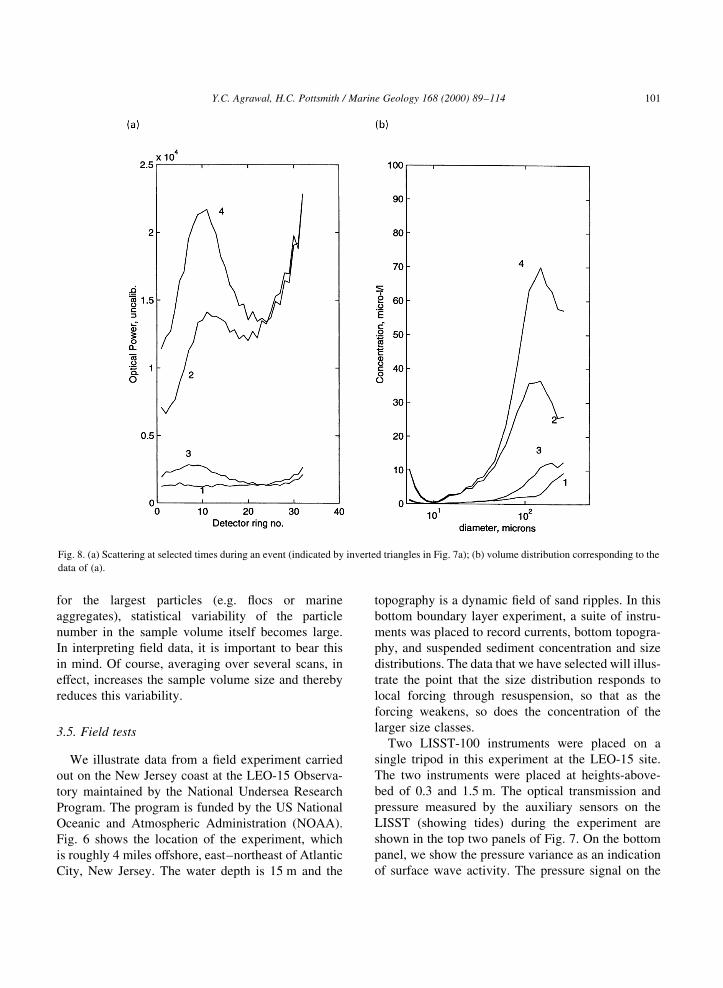
Fig. 8. (a) Scattering at selected times during an event (indicated by inverted triangles in Fig. 7a); (b) volume distribution corresponding to the
data of (a).
Page 14
bottom related to gravity waves is computed as
follows. As pressure was sampled at 15 min intervals,
tides and surface waves are separated by ®rst high-
pass ®ltering the pressure record. This provides
samples of wave-height at the 15 min intervals.
These realizations of wave-height are then squared
and convolved with an 8-point top-hat ®lter to gener-
ate smooth estimates of mean-square wave-height
during the course of the experiment. The arrows on
this optical transmission record indicate the duration
from which scattering distribution records are
analyzed. It is seen that when the optical transmission
is higher (clearer water, curves 1&3 in 8a), the
maxima of the scattering curves occur at the inner-
most rings even though there is relatively less scat-
tered light. This corresponds to large particles in the
size distribution (curves 1&3, 8b). At the valleys in
the transmission curve (Fig. 7, top panel, second and
fourth inverted triangles), a lot more scattered light is
seen but with a peak at somewhat larger angles. This
implies smaller particles (curves 2&4, Fig. 8a and b).
The data suggest that during weaker forcing, when
large, dense primary particles can not be supported
by turbulence, ¯ocs must form with the characteristic
strong scattering at the smaller angles. These might
break up with stronger forcing, when also, an addi-
tional supply of sediment is made available to the
water column. We have observed similar patterns in
the Coastal Mixing and Optics experiment (Agrawal
and Traykovski, 2000).
Theory has predicted, as described in the introduc-
tory sections of this paper, that vertical gradients in
concentration can be expected for particles whose
settling velocities approach kup. Such observations
are possible with two vertically placed instruments.
The use of vertical gradients in size distribution
using the (Rouse, 1937; #1255) formulation suggests
possibilities of inferring the particle settling veloci-
ties. We shall examine the data from this standpoint
in a future publication.
4. LISST-ST
This instrument for measurement of the size-depen-
dent settling velocity distribution without assumption
of particle density is similar to the LISST-100. The
optics end of the instrument is enclosed in a settling
tube of 30 cm length. The settling column, Fig. 9,
which is enclosed in this 5 cm diameter settling
tube, consists of a 5 cm £ 1 cm wide £ 30 cm tall
rectangular volume. The rectangular column reduces
¯ow Reynolds number signi®cantly from the round
tube for the draw-in velocities. This feature is incor-
porated to assure faster suppression of turbulence in
order to obtain good estimates of the rapidly falling
larger particles. The settling tube has openings at the
top and bottom. Two motors are incorporated in the
system. One motor operates the doors and the second
powers a propeller in the settling tube, placed just
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114102
Fig. 9. The settling column, along with the propeller and sliding
doors. Top and bottom lids are not shown. The column is 5 cm in
diameter, and 30 cm tall from the inlet to the laser beam.
Page 15
below the laser beam. Vertically sliding doors with
radial `O'-ring seals are used to open and close the
doors. The cycle of operation is as follows: before
closing the doors, the motorized propeller in the
settling tube is powered up. Its function is to draw
in a new sample. The sample enters the settling tube
at the top, and is blown out at the bottom. A short-time
(4 s.) is allowed to elapse after the propeller power is
turned off. This ensures ®lling the tube with new ¯uid,
unaffected by propeller motion. At this time, the doors
are rapidly closed, in about 50 m s. This begins the
settling experiment. Data are taken at logarithmically
scheduled sampling intervals. In all, 83 scans are
saved over a day. At the end of the settling experi-
ment, the propeller is powered so that its vigorous
turbulence cleans the settling column and the optics
windows. The doors are opened, so that the propeller
blows the stirred water out, and at the same time
draws in a new sample. This begins the next cycle
of data acquisition.
Consider now the evolution of size distribution at
the optics block in the lower part of the settling
column where the laser senses size distribution. In
the case of a homogeneous suspension, i.e. all parti-
cles having the same mass density, each particle size
class will traverse the 30 cm settling tube at its own
unique settling velocity, determined solely by
diameter. Assuming that the settling column was ®lled
with a well-mixed sample of water, the concentration
history of any single size class of particles can be
expected as follows. As particles of this size class
settle, at some point in time, those particles that
were at the top of the settling column reach the laser
beam. Until this time, the concentration observed at
the laser beam can be expected to be constant, equal to
the ®ll-up concentration. Any apparent variations in
concentration prior to this time can arise due to imper-
fect mixing and small number statistics of the parti-
cles. Further settling causes the particles to fall
through the 6-mm diameter laser beam leaving no
more particles of this size to produce laser scattering.
Thus, over a duration corresponding to the time to fall
through the laser beam, the concentration for any size
class of particles will go from its natural value at ®ll-
up, to zero. Thus, both the onset of the decline in the
idealized constant concentration history, and the
length of duration of the sloping region will be
uniquely related to a particular particle size. This is
the idealized expectation. In reality, a few effects
complicate observations. First, natural particles are
seldom of a homogeneous composition, so that a
variation in particle density will cause a smearing of
the concentration pro®le. Second, the existence of
residual turbulence from the ®ll-in period smears the
measurement of settling velocity for the largest parti-
cles. A third factor is particularly frustrating, but only
in the laboratory: convection currents caused by
temperature changes with the cycling of ventilation
systems. It is worth noting that turbulence or convec-
tive motions must be weaker than the smallest settling
velocity of interest, in order to make a correct
measurement. Such conditions are dif®cult to achieve
in the laboratory for the smallest particles, whose
settling velocities may be a small fraction of a mm/
s, in effect setting the limit of measurable small-parti-
cle settling-velocity. The requirement that turbulence
or convection be much weaker than the smallest
settling velocity of interest is fundamental, not
speci®c to any technique. The thin settling column
of the LISST-ST is a couple of orders of magni-
tude thinner than typical other settling tubes, e.g.
the ROST device (roughly 30 cm £ 20 cm cross-
section) employed by Hill et al. (1994), or the
INSSEV of Fennessy et al. (1994). The data we
show below indicate that, signi®cantly, turbulence
in our settling column is indeed fully suppressed
so that not only does the water clarity increase
monotonically, but also the smallest measurable
particles do settle out over a time that is reason-
ably predicted by Stokes law.
In order for the settling histories to be employed for
estimation of settling velocity, it is necessary that the
concentration measurements for each size class be
totally independent of any other. Smoothing, as
often employed in least squares inverse algorithms,
works against statistical independence. Thus, one
must ®rst ask the question: how many truly indepen-
dent size classes are derivable from the multi-angle
scattering data. In a landmark paper, Hirleman (1987)
showed that the answer depends on the conditioning
of the forward matrix. Typically, with a 100:1 range
of scattering angles, only about eight truly indepen-
dent size classes can be obtained. Each of these size
classes contains particles spanning a size range
1.78:1. We offer this summary view for quick
reference; the interested reader may understand the
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114 103
Page 16
relationship between measurement noise and the
information content of the data by referring to Hirle-
man (1987).
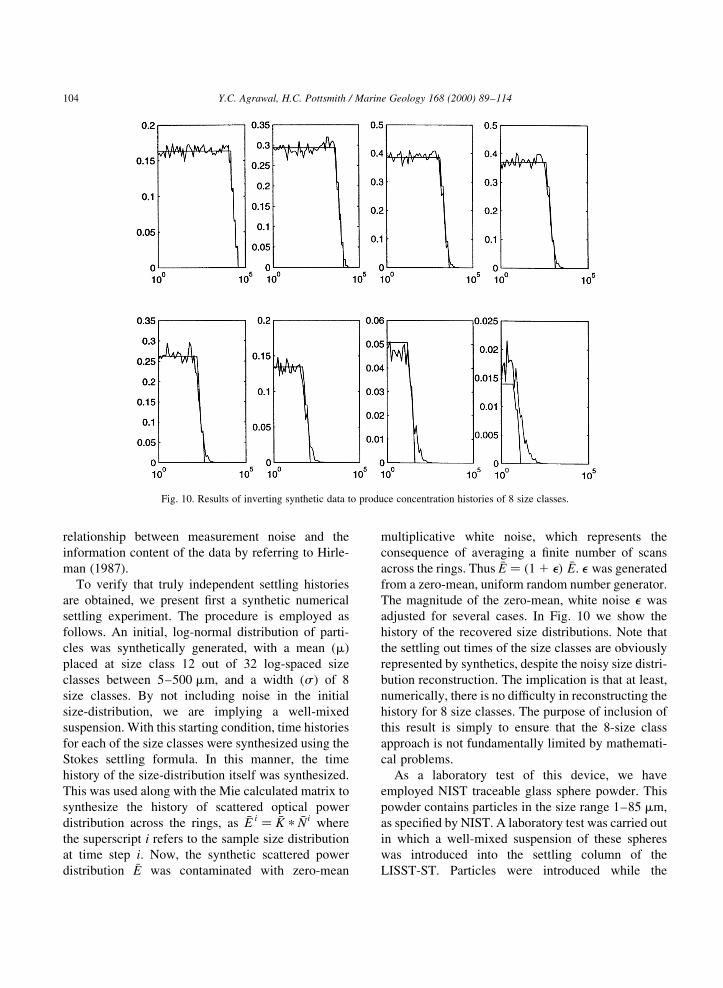
To verify that truly independent settling histories
are obtained, we present ®rst a synthetic numerical
settling experiment. The procedure is employed as
follows. An initial, log-normal distribution of parti-
cles was synthetically generated, with a mean (m)
placed at size class 12 out of 32 log-spaced size
classes between 5±500 mm, and a width (s ) of 8
size classes. By not including noise in the initial
size-distribution, we are implying a well-mixed
suspension. With this starting condition, time histories
for each of the size classes were synthesized using the
Stokes settling formula. In this manner, the time
history of the size-distribution itself was synthesized.
This was used along with the Mie calculated matrix to
synthesize the history of scattered optical power
distribution across the rings, as �E i � �K p �Ni where
the superscript i refers to the sample size distribution
at time step i. Now, the synthetic scattered power
distribution �E was contaminated with zero-mean
multiplicative white noise, which represents the
consequence of averaging a ®nite number of scans
across the rings. Thus �E � �1 1 e� �E: e was generated
from a zero-mean, uniform random number generator.
The magnitude of the zero-mean, white noise e was
adjusted for several cases. In Fig. 10 we show the
history of the recovered size distributions. Note that
the settling out times of the size classes are obviously
represented by synthetics, despite the noisy size distri-
bution reconstruction. The implication is that at least,
numerically, there is no dif®culty in reconstructing the
history for 8 size classes. The purpose of inclusion of
this result is simply to ensure that the 8-size class
approach is not fundamentally limited by mathemati-
cal problems.
As a laboratory test of this device, we have
employed NIST traceable glass sphere powder. This
powder contains particles in the size range 1±85 mm,
as speci®ed by NIST. A laboratory test was carried out
in which a well-mixed suspension of these spheres
was introduced into the settling column of the
LISST-ST. Particles were introduced while the
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114104
Fig. 10. Results of inverting synthetic data to produce concentration histories of 8 size classes.
Page 17
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114 105
Fig. 11. History of: (a) optical transmission; and (b) scattering distribution during the settling experiment using glass spheres.
Fig. 12. Concentration history of 8 size classes for the NIST standard glass spheres. The solid lines show the estimates of concentration, the dots
indicate error of the estimate. When error exceeds the estimates, the size class history is fully discarded.
Page 18
instrument was submerged in an approximately
constant temperature tank. Scattered optical power
distribution on the detector rings was recorded on a
logarithmic time schedule, with samples acquired a
few seconds apart initially, and several thousand
seconds apart toward the end. The settling experiment
lasted a full 24-hour duration. During this time, 83
scans were stored. As usual, the scattering signature
of the suspension at any of the 83 scans was calculated
by subtracting the zscat from the recorded data. The
optical transmission and scattered optical power
history are shown, respectively, in Fig. 11a and b.
The water monotonically gets clearer as particles
settle. Similarly, the scattering signature during the
course of settling shows a shift in the location of the
peak to the right, i.e. to the larger rings, as would be
expected with reduction in large particles that scatter
into small angles. These data are inverted using an 8-
size class inverse. Fig. 12 shows the settling history.
In this case, note ®rst that the ®rst size class (5±8 mm)
is empty as very little mass was present in the powder.
The size classes 3±5 contain the bulk of the particles,
and these are displayed in c±e. The dots on each plot
show the error of the estimate, computed from the
inverse of the data and the ®t. Thus, when the noise
level represented by the dots is small compared to the
signal level, settling velocity estimates from these
data can be trusted. This criterion serves as a guide
for interpreting the settling velocity estimates. It
follows that again, there is negligible mass in the
larger size classes, as is evidenced by large noise
spikes in f±h.
The settling history of each size class is converted
to a settling velocity following an optimization proce-
dure. Assuming homogeneity within a size class, the
problem of estimating the settling velocity becomes a
one-parameter optimization problem. Consider the
settling time for particles in size class n. This size
class contains particles of sizes aminrn21 to aminr
n:
Now, a single idealized concentration is constructed
that has a constant concentration for the duration
30 cm=wf;n; followed by a linearly sloping concentra-
tion as the particles fall through the laser beam, and a
zero concentration thereafter. The sloping section has
a duration such that, the smallest to the largest parti-
cles in the size class fall through the 6mm beam in this
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114106
Fig. 13. Estimates of settling velocity of glass spheres, compared with Stokes settling. Note that as the size distribution is quite narrow (Fig. 3,
and also Fig. 12), several size classes are unpopulated. This produces noisy estimates for the nearly empty size bins. As a result, the settling
velocity can be estimated for only size classes 2±5.
Page 19
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114 107
Fig. 14. Photograph of the LISST-ST instrument shown mounted on the tripod used at the LEO-15 site.
Page 20
time. This duration begins at 30=wf;;n: The smallest
particles in the size class fall through the laser beam
over a time equal to 6 mm=wf;n21 whereas the largest
particles within the size class fall through over a time
equal to 6 mm=wf;n: Thus the length of the sloping part
of concentration history is expected to be
6=�1=wf;n21 2 1=wf;n�: In effect, the square parentheses
arise due to the ®nite size-width of size class n. Now
since r � 1:78 and settling velocity can be reasonably
expected to follow Stokes' law, the settling velocities
will vary within a size class by r2 � 3:2: Thus, the
break in the sloping duration will begin at some time
TB and end at 3.2 TB. The difference, 2.2 TB is the
length of the sloping region.
One now ®nds a TB which minimizes the mean-
square difference between the idealized and normal-
ized history of any size class. Mathematically, this is
expressed as follows. Let the time history of concen-
tration in size class n be called Cn(t), then one de®nes
an idealized history by the function F (t) such that it is
constant for time TB equal to 30 cm=wf;n21; gradually
decreases to zero over the time it takes particles of
sizes in the size-class to fall through 6 mm, i.e. 2.2 TB
and is zero thereafter:
F�t� � 1=TB
ZT
0Cn�t� dt for 0 , t , TB;
� F�TB�2 �t 2 TB�=2:2TB for TB , t , 3:2TB;
� 0 for t .� TB
�9�The best estimate of settling time TB is found by mini-
mizing the least square difference of the history with
the idealized history F�t�; i.e.:
d=dTB{�Cn�t�2 F�t�� 2} � 0; �10�The procedure is implemented numerically. The solu-
tions TB for each size class are used separately to
estimate the settling velocity for that size class.
These data are shown in Fig. 13. It can be seen that
the experimental data match Stokes settling to an error
of nearly 20%. We are not certain as to the cause of
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114108
Fig. 15. The optical transmission for 10 successive days.
Page 21
the apparently small bias, but we speculate that the
bias results from the observed longer than theoretical
sloping region of the concentration history, which in
turn, probably is caused by convective currents in the
laboratory excited by ventilation.
A ®nal comment regarding estimation of settling
velocities with a sampling system concerns ¯oc
break-up. Gibbs and associates have published a
series of articles on ¯oc break-up (Gibbs, 1982;
Gibbs and Konwar, 1982, 1983). These articles
concern themselves with breakage of ¯ocs in the
course of, respectively, analysis with a particular opti-
cal blockage instrument, due to pipetting, and during
Niskin bottle sampling. We have not been able to
quantify such effects in this study. A noteworthy
detail is that the sample water is drawn through
12.7 mm holes at the top of the settling column.
4.1. Field tests
The ®eld settling velocity data presented in this
paper were obtained in the NURP program already
mentioned in an earlier section, although the current
data were acquired in a deployment at the site in
December 1997. The LISST-ST was mounted on a
tripod and deployed at the approximately 15 m
depth for bottom boundary layer measurements from
a tripod. The instrument is displayed on the tripod in
Fig. 14. A settling experiment was begun each
midnight and lasted most of the 86,400 remaining
seconds of the day. Upon examination of data, the
settling tube appears to have operated routinely for
the ®rst 21 days of the deployment.
We display two key sets of data, again with the
instrumentation point of view, leaving detailed scien-
ti®c discussion to a later publication. The ®rst is a
history of optical transmission on 10 successive
experimental days. In this case (Fig. 15) although
due to different environmental conditions on different
days, the initial optical transmission varies, the optical
transmission increases in time, i.e. water monotoni-
cally clears as particles settle. Again, signi®cantly,
this observation is consistent with expectation, and,
it contrasts with the earlier settling tube work of Zane-
veld et al. (1982), and Hill et al. (1994). We interpret
this monotonic increase in optical transmission to
mean that there was no leakage into or out of the
settling tube and that the initial turbulence was
suppressed in a time-scale shorter than the shortest
time at which any signi®cant settling out occurs.
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114 109
Fig. 16. Concentration history for the 8 size classes during one of the 10 experiments shown in Fig. 15.
Page 22
Furthermore, the similarity of the transmission
histories suggests that the particles were of a similar
settling velocity distribution. This becomes evident
when it is seen that the optical attenuation t is propor-
tional to the sum of the concentration of the various
component size classes. As each size class settles out,
the transmission would then show an increase. Thus, a
similar slope in the history on several days implies
settling out of particles at near-equal times.
The concentration histories derived from the scat-
tering are displayed in Fig. 16. The 8 size classes are
identical for those of Fig. 11. In this case, we see a
settling rate that is slower than the Stokes settling rate
for siliceous particles in the smallest size classes, and
an even greater divergence for the largest size classes.
The fact that the particles in the smallest size classes
settle out at all indicates that thermally driven
residual motions are smaller than the smallest measur-
able settling velocity: 30 cm=8:6 £ 104 s; or 3:5 £1024 cm=s: In a separate paper, we shall publish the
details of consistency between settling rate estimates
obtained on different days. For now we note that the
validity of Stokes settling for the lower Reynolds
numbers, as veri®ed in Fig. 11, permits us to estimate
the density of particles from their measured settling
velocities. In Fig. 17, the settling velocity distribution
is displayed for the particles at the LEO-15 site. Also
displayed is a slope-2 line that would correspond to
constant density particles falling in Stokes regime.
The fact that the marine particles deviate from this
behavior is an indication of the existence of ¯ocs.
The departure from constant density line is more
exaggerated at the larger sizes, suggesting that the
larger particles are loose aggregates.
A simple ®t to the data of Fig. 17 suggests a size vs.
settling velocity relationship as:
wf�d� � 0:45 £ 1023a1:17 �11�The generalized validity of this relation will be
explored from the data at LEO-15 in a subsequent
paper.
5. Discussion
The measurement of particle size distributions is of
intrinsic interest to the marine scientist, whether from
the point of view of sediment transport, biological
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114110
Fig. 17. Settling velocity estimates from a set of settling experiments at LEO-15.
Page 23
process studies or even bubble formation. The devel-
opment of capabilities to estimate total suspended
sediment concentration correctly, without errors intro-
duced by changes in the natural particle size distribu-
tion is sure to add to the researchers' and the
engineers' bag of tools. The autonomous capability
of these devices permits long-term use for observa-
tions of episodic events, which in some places, do
most of the transport of sediments.
The instrumentation described here does have
limitations. For example, the consequence of the
presence of very light aggregate type particles to
the determination of size distribution is not known.
The small-angle scattering properties of these marine
aggregates need to be studied. Also, there is a strong
body of literature suggesting, from photographs, that
stringy scatterers are present in aquatic environments,
(e.g. Honjo et al., 1984). Here, the sphere approxima-
tion is, of course, unsuitable. Diffraction theory
predicts that thin cylinders produce streaked scatter-
ing in a plane normal to the plane containing the
cylinder. Thus, strings produce streaks across the
face of the ring-detector. If a streak lies on one quad-
rant of the detector, it produces a bias in that quadrant.
This is frequently recognizable in the data as a
sawtooth shape in the scattering signature. The same
behavior has also been observed in the laboratory
when scattering is observed from natural particles in
still water. When turbulence is introduced, the scatter-
ing signature becomes smooth instantly. This effect is
due to the establishment of preferred orientation of
particles falling in still water. As these particles are
also not spherical, the scattering has preferred orien-
tations, again producing a sawtooth signature in the
scattering data. These characteristics are helpful hints
in learning more about the nature of the scatterers,
although the quanti®cation of such interpretation is
as yet not possible.
A second limitation is in the range of turbidity that
can be measured. We have observed that when the
optical transmission is less than 30%, multiple-scat-
tering effects begin to appear. This refers to the re-
scattering of scattered light. The lower the transmis-
sion, the stronger the effects of multiple scattering.
Theoretical investigations of multiple scattering
reveal that if such effects are ignored, the recovered
particle size distribution shows a bias toward the small
sizes. Algorithms for multiple scattering are available
in the literature as applied to this problem (Hirleman,
1991).
When measuring settling velocities, there is a
continual concern regarding the breakup of fragile
aggregates in the process of drawing of a sample.
There is no known way of estimating such ¯oc
damage at present. Perhaps an in-situ photographic
approach can be used for an assessment.
Acknowledgements
This paper is the result of several years of work
supported ®rst by Dr Joseph Kravitz of the Of®ce of
Naval Research under current contract no. N00014-
95-C-0101, by Dr Curtis Olsen of the Department of
Energy, contract no. DE-FG03-96-ER62179 and via a
grant from NOAA under the NURP program managed
by Dr Waldo Wake®eld at Rutgers University. The
authors acknowledge the many constructive
comments of the reviewers who acquainted us with
the work of Gibbs cited in the bibliography.
Appendix A
The size distribution function n(a) is de®ned so that
n�a�da represents the number of particles per unit
volume of water, of size a in a size range da. Thus
the area distribution is a2n�a� and the volume distri-
bution is given by a3n�a�: We treat the measurement
of optical attenuation, background scattering, both of
which are necessary auxiliary measurements, and
inversions below.
A.1. Optical attenuation
With reference to Fig. 1, let the laser output power
be Pl. A fraction of this power �1 2 a�Pl is split off
and sensed by the reference detector, Pr. The remain-
ing, aPl enters water after some losses due to scatter-
ing off surfaces in the prism and pressure-resistant
window. If h trans is the overall optical ef®ciency of
the components from the beam splitter till the laser
beam enters water, then the laser power entering water
will be � ah transPl. For the sake of simplicity, de®ne
P0 � ahtransPl: Consider ®rst the case of pure ®ltered
water. The power reaching the receiving window will
be attenuated due to absorption in water. It is conven-
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114 111
Page 24
tional in ocean optics literature to use the symbol a for
pure water absorption (in m21) so that the laser power
reaching the receiving window will be e2alP0: Further
optical losses due to re¯ections off optical surfaces
can be included as another optical ef®ciency factor,
h recv so that the power sensed by the `transmiss-
ometer' photodiode is e2alP0hopt2: Combining the
factors ah trans h recv into an overall optical ef®ciency
hopt � ahtranshrecv; one sees that for the case of pure
water, the `transmissometer' diode sees a laser power
given by
Pt;clear � e2alhoptPl
�A1�The introduction of absorptive and/or scattering mate-
rial, with an additional attenuation of light by absorp-
tion and scattering represented by cA (m21), will
clearly change the power incident on the transmiss-
ometer photodiode to
Pt;turbid � exp{ 2 �a 1 cA�l}hoptPl. �A2�From the ratio of Eqs. A2 and A1, the transmissometer
photodiode measures the additional cA due to the
dissolved and suspended material. When there is no
dissolved absorbing material and the particles are
non-absorbing, cA � b; the total scattering, so that a
direct measure of total scattering by particles is
obtainable. In general, the measured attenuation will
be the sum of that due to absorption and scattering by
particles and due to any dissolved absorptive material.
These quantities are of interest to optical oceanogra-
phers concerned with light propagation studies.
A.2. Background light
The measurement of background light and its
adequate subtraction from the total signal at the ring
detector is important, especially when the scattering
from particles is weak. Buchele (1988) has shown that
if the background light is measured in the absence of
scattering particles, then this background ®eld should
be ®rst multiplied by exp�2cAl� before subtracting
from the measurement which is the combined signal
from particles and optical surfaces. This is incorpo-
rated in Eq. (5).
A.3. Scattered light signal and inversion
For the geometry of Fig. 1, the optical power
scattered into a solid angle dV from a single particle
placed in the laser beam, at a distance x from the
transmitting window is given by:
I � �P0 e2cx=A��i1 1 i2� e2c�l2x� dV=k 2 �A3�
Where, i1 1 i2 are intensity functions de®ned in Van
deHulst (1957) (p. 129), and where we explicitly show
attenuation of the beam up to the particle as e2cx and
from the particle to the receiving window as e2c(l2x). It
follows that an elementary volume, of diameter A and
length dl with a particle number density n(a)da per
unit volume would produce a scattering given by
I1 � P0 e2cl�i1 1 i2�dl n�a�da dV=k 2 �A4�In the above, the attenuation coef®cient c is the sum of
absorption by water, dissolved material, and particles,
and attenuation by scattering by particles:
c � aw 1 ad 1 b �A5�Now, the solid angle in the focal plane is:
d V � u d u �A6�so that, one writes for the power sensed by a single
ring, after integrating along the optical path in water
and after including the optical ef®ciency of the receiv-
ing optics:
Ei �ZZ
hrecvP0 e2cl�i1 1 i2�dl n�a�u da du=k2; �A7�
or
Ei � P0hrecvl e2cl=k2
Zn�a�a2da
Z�i1 1 i2�a22u du
This equation, in a manner similar to Hirleman
(1987), is rewritten in the discretized form:
or �E � �P0hrecvl e2cl=k2� �KNA �A8�
Each element of the kernel matrix KÅ is the inner inte-
gral, and each element of the vector �NA is the area in
the size range, as represented by the outer integral of
Eq. (A7). The integrations are carried out, in angles
and sizes, respectively, over ri21umin , u , riumin
and r j21amin , a , rjamin:
The photo-current from the corresponding ring is
converted to a voltage using an operational ampli®er
circuit, and the voltage is digitized. If R is the respon-
sivity of the photo-diodes, and the gain (current-to-
voltage) is G, then the voltage sensed will be GR �E:
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114112
Page 25
With a 12-bit 5 V full-scale A/D converter, the digital
counts for the 32 rings will be given by the array dÅ:
�d � �4096=5�GR�P0hrecvl e2cl=k2� �K �NA �A9�
This is the array noted in Eq. (5). The laser power P0 is
simply a constant times the reference power Pr, the
power sensed by the reference sensor (see Fig. 1). We
now combine all the constants in front of the matrix
product to write:
�d � K�Pr e2cl� �K �NA or �d � KtPr�K �NA �A10�
The measured digital counts include the scattering
from background optical surfaces also, which is atte-
nuated by t exactly as scattering is. Thus the
measured digital counts are:
�d � KtPr� �K �NA 1 zscat� �A11�This is the basis for the formulation of Eq. (5). The
constant K can be computed from above, or it can be
estimated by calibrating a known particle size distri-
bution as in Eq. (7).
A.4. Solution for NÅ A
The inversion of Eq. (A3) is carried out using a
modi®ed Chahine method described by Riley and
Agrawal (1991). This is a non-linear iterative solution
and has been empirically determined to be the best
performer. According to this method, the �n 1 1�thiterate is computed from the nth by
Nn11A;i � Nn
A;i´j �A12�where j is the ratio of the measured scattering at the
ring corresponding to size i and the magnitude of the
predicted scattering at this ring from the previous iter-
ate. Once a reasonable convergence is reached, the
volume distribution is computed as (leaving out
factors of p):
VA;i � 4=3aiNA;i �A13�We have expressed this entire procedure in the short-
hand INV(S) in Eq. (7). It should be noted that the
mathematical problem of inversion continues to
receive attention of researchers. A recent survey
appears in a special issue of the journal Applied Optics
(vol. 30, no. 33, 1991). The interested reader is
encouraged to study the works of Twomey (1977)
and Hirleman (1987) which address the fundamental
information content of data in inverse problems.
References
Agrawal, Y.C., Pottsmith, H.C., 1993. Optimizing the kernel for
laser diffraction particle sizing. Appl. Opt. 32 (22), 4285±4286.
Agrawal, Y.C., Pottsmith, H.C., 1994. Laser diffraction particle
sizing in STRESS. Continental Shelf Res. 14 (10/11), 1101±
1121.
Agrawal, Y.C., Traykovski, P., 2000. Particles in the bottom bound-
ary layer: concentration and size dynamics through events. J.
Geophys. Res. (in press).
Bale, A.J., Morris, A.W., 1987. In situ measurement of particle
size in estuarine waters. Estuarine Coastal Shelf Sci. 24,
253±263.
Born, M., Wolf, E., 1975. Principles of Optics, Pergamon, New
York, p. 808.
Buchele, D.R., 1988. Particle sizing by weighted measurements of
scattered light, NASA-TM-100968, NASS.
Crawford, P., Hay, A.E., 1993. Determining suspended sand size
and concentration from multi-frequency acoustic backscatter . J.
Acoustic Soc. Am. 94, 3312±3324.
Dietrich, W.E., 1982. Settling velocity of natural particles. Water
Resour. Res. 18 (6), 1615±1626.
Downing, J.P., Sternberg, R.W., Lister, C.R.B., 1981. New instru-
mentation for the investigation of sediment suspension
processes in the shallow marine environment. Mar. Geol. 42,
19±34.
Dyer, K.R., et al., 1996. A Comparison of in-situ techniques for
estuarine ¯oc settling velocity measurements. J. Sea Res. 36
(1/2), 15±29.
Eisma, D., et al., 1996. Intercomparison of in-situ suspended matter
(¯oc) size measurements. J. Sea Res. 36 (1/2), 3±14.
Fennessy, M.J., Dyer, K.R., Huntley, D.A., 1994. INSSEV: an
instrument to measure the size and settling velocity of ¯ocs
in-situ. Mar. Geol. 117, 107±117.
Gentien, P., Lunven, M., Lehaitre, M., Duvent, J.L., 1995. In-situ
depth pro®ling of particle sizes. Deep-Sea Res. 42 (8), 1297±
1312.
Gibbs, R.J., 1982. Floc breakage during HIAC light-blocking analy-
sis. Environ. Sci. Technol. 16 (5), 298±299.
Gibbs, R.J., Konwar, L.N., 1982. Effect of pipetting on mineral
¯ocs. Environ. Sci. Technol. 16 (2), 119±121.
Gibbs, R.J., Konwar, L.N., 1983. Sampling of mineral ¯ocs using
Niskin bottles. Environ. Sci. Technol. 17 (6), 374±375.
Hay, A.E., Sheng, J., 1992. Vertical pro®les of suspended sand
concentration and size from multifrequency acoustic backscat-
ter. J. Geophys. Res. 97 (C10), 15 661±15 677.
Hill, P.S., Sherwood, C.R., Sternberg, R.W., Nowell, A.R.M., 1994.
In situ measurements of particle settling velocity on the northern
California continental shelf. Continental Shelf Res. 14 (10/11),
1123±1138.
Hirleman, E.D., 1987. Optimal scaling of the inverse Fraunhofer
diffraction particle sizing problem: the linear system produced
by quadrature. Particle Characterization 4, 128±133.
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114 113
Page 26
Hirleman, E.D., 1991. General solution to the inverse near-forward-
scattering particle-sizing problem in multiple-scattering envir-
onments: theory. Appl. Opt. 30 (33), 4832±4838.
Honjo, S., Doherty, K.W., Agrawal, Y.C., Asper, V.L., 1984. Direct
optical assessment of large amorphous aggregates (marine
snow) in the deep ocean. Deep-Sea Res. 31 (1), 67±76.
Jones, S.E., Jago, C.F., 1996. Determination of settling velocity in
the Elbe estuary using quisset tubes. J. Sea Res. 36 (1/2), 63±67.
Lynch, J.F., Irish, J.D., Sherwood, C.R., Agrawal, Y.C., 1994.
Determining suspended sediment particle size information
from acoustical and optical backscatter measurements. Conti-
nental Shelf Res. 14 (10/11), 1139±1165.
Moody, J.A., Butman, B., Bothner, M.H., 1987. Near-bottom
suspended matter concentration on the continental shelf during
storms: estimates based on in-situ observations of light trans-
mission and a particle size dependent transmissometer claibra-
tion. Continental Shelf Res. 7 (6), 609±628.
Puls, W., Kuhl, H., 1996. Settling velocity determination using the
Bigdan settling tube and the Owen settling tube. J. Sea Res. 36
(1/2), 119±125.
Riley, J.B., Agrawal, Y.C., 1991. Sampling and inversion of data in
diffraction particle sizing. Appl. Opt. 30 (33), 4800±4817.
Rouse, H., 1937. Modern conceptions of the mechanics of ¯uid
turbulence. Trans. Am. Soc. Civil Engng 102, 463±554.
Smith, J.D., 1977. Modeling of Sediment Transport on Continental
Shelves, the Sea, Wiley, New York, pp. 539±577.
Swithenbank, J., Beer, J.m., Taylor, D.S., Abbot, D., McCreath,
G.C., 1976. A laser diagnostic technique for the measurement
of droplet and particle size distribution, AIAA, New York, pp.
76±79.
Thorne, P.D., Hardcastle, P., 1997. Acoustic measurements of
suspended sediments in turbulent currents and comparison
with in-situ sampling. J. Acoustic Soc. Am. 101, 2603±2614.
Traykovski, P., Latter, R., Irish, J.D., 1999. A laboratory evaluation
of the laser in-situ scattering and transmissometry instrument
using natural sediments. Mar. Geol. 159, 355±367.
Twomey, S., 1977. An Introduction to the Mathematics of Inver-
sion. Remote Sensing and Indirect Measurements, Elsevier,
Amsterdam, p. 243.
Van Leussen, W., 1996. The RWS ®eld settling tube. J. Sea Res. 36
(1/2), 83±86.
Van deHulst, H., 1957. Light Scattering by Small Particles, Dover,
New York, p. 470.
Wiberg, P.L., 1995. A theoretical investigation of boundary layer
¯ow and bottom shear stress for smooth, transitional, and rough
¯ow under waves. J. Geophys. Res. 100 (C11), 22 667±22 679.
Yariv, A., 1988. Optical Electronics, Holt, Rinehart, and Winston,
New York, p. 551.
Zaneveld, J.R.V., Sprinrad, R.W., Bartz, R., 1982. An optical
settling tube for the determination of particle size distribution.
Mar. Geol. 49, 357±376.
Y.C. Agrawal, H.C. Pottsmith / Marine Geology 168 (2000) 89±114114