20
I/O Management and Disk Scheduling Chapter 11
| Date post: | 21-Dec-2015 |
| Category: |
Documents |
| View: | 214 times |
| Download: | 0 times |

I/O Management and Disk Scheduling
Chapter 11

Categories:
For Human interaction: Printers, terminals, keyboard, mouse
Machine readable: Disks, Sensors, Controllers, Actuators …
Communication: Modems, Network cards, etc.
Differences:
Data rate: several orders of magnitude difference between transfer rates
Applications: e.g. Disk - store files, databases, virtual pages for MMU…
Complexity of control: e.g. Printer – simple control interface; disk – more complex
Unit of transfer: e.g. stream of bytes for a terminal or in blocks for a disk
Data representation: Different encoding schemes (e.g. parity conventions)
**HereB I/O Devices

Data Rates for some I/O Devices
101 102 103 104 105 106 107 108 109 1010
Data Rate (Byte/s)
HDMI v 2.0 (2.25 GB/s)
10 Gigabit Ethernet (1.25 GB/s)
USB 3.0 (625 MB/s)
SSD (500 MB/s)
Firewire 3200 (393 MB/s)
HardDisk HDD (140 MB/s)
Gigabit Ethernet (125 MB/s)
Firewire 800 (98 MB/s)
USB 2.0 (1.5 MB/s)
Modem (144 kB/s)
Mouse serial port (150 B/s)

Programmed I/O one byte/word at a time uses polling wastes CPU cycles suitable for special-purpose micro-processor-controlled devices
Interrupt-driven I/O many I/O devices use this approach as a good alternative to
polling whenever it is needed
Direct Memory Access (DMA) For block transfers minimum CPU participation (only at the beginning and at the end)
I/O Control Methods
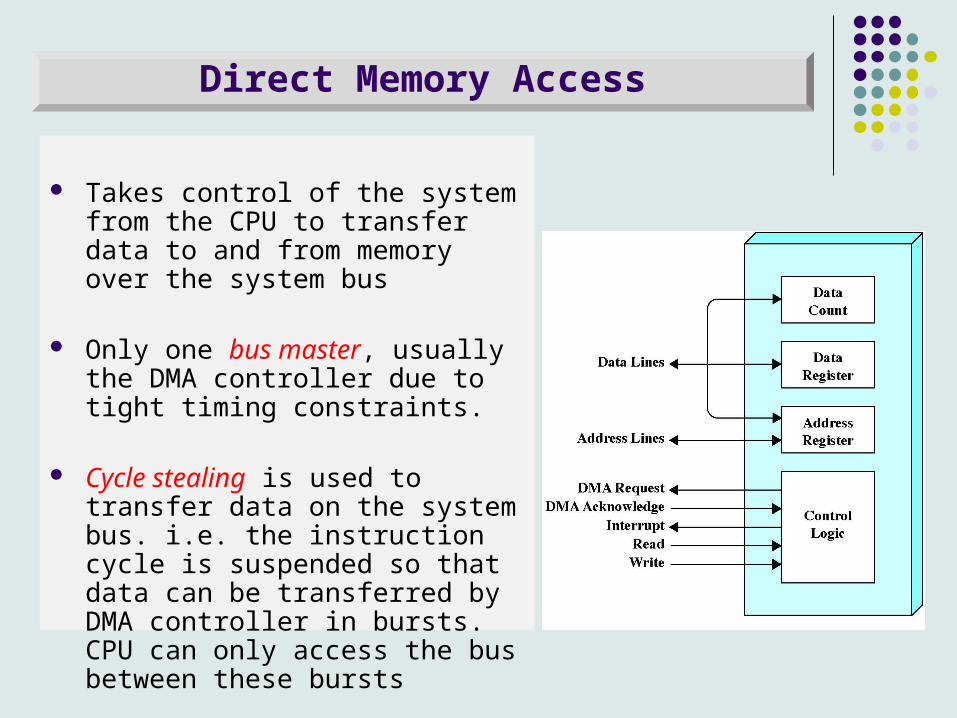
Direct Memory Access
Takes control of the system from the CPU to transfer data to and from memory over the system bus
Only one bus master, usually the DMA controller due to tight timing constraints.
Cycle stealing is used to transfer data on the system bus. i.e. the instruction cycle is suspended so that data can be transferred by DMA controller in bursts. CPU can only access the bus between these bursts
No interrupts occur (except at the end)

Efficiency Most I/O devices are extremely slow compared to main memory I/O cannot keep up with processor speed Use of multiprogramming allows for some processes to be waiting on
I/O while another process executes Swapping is used to bring in additional ready processes
Generality Desirable to handle all I/O devices in a uniform manner Hide the details of device I/O in lower-level routines. Processes and
upper levels see devices in general terms such as read, write, open, close, lock, unlock
Operating System Design Issues

I/O Buffering Reasons for buffering
If buffering is not used, the process which is waiting for I/O to complete can not be swapped out because the pages involved in the I/O must remain in RAM during I/O.
Overlap I/O with processing and increase efficiency
Block-oriented: Data is stored/transferred in fixed-size blocks (e.g. disks, tapes) Stream-oriented: Data is transferred in streams of bytes (e.g. terminals, printers,
communication ports, mouse, etc.)

OS assigns a system buffer in main memory for an I/O request Input transfers made to buffer Block is moved to user space when needed. User process can process one
block of data while another block is moved into the buffer
Swapping of user process is allowed since input is taking place in system memory, not user memory
T = Disk I/O Time M = time to move the data into user spaceC = Computation Time
No Buffer Time = T + C
Single Buffer Time = Maximum[ C, T ] + M (overlap I/O with computation)
**HereA Single Buffer

A process can transfer data to or from one buffer while the OS empties or fills the other one
T = Disk I/O Time C = Computation Time M = time to move the data into user space
If (C + M) < T I/O device is working at full speedIf (C + M) > T add more I/O buffers to increase efficiency!
Circular buffer used when more than two buffers are needed and the I/O operation must keep up with the process
Double Buffer

Hard Disk Drive (HDD) Components
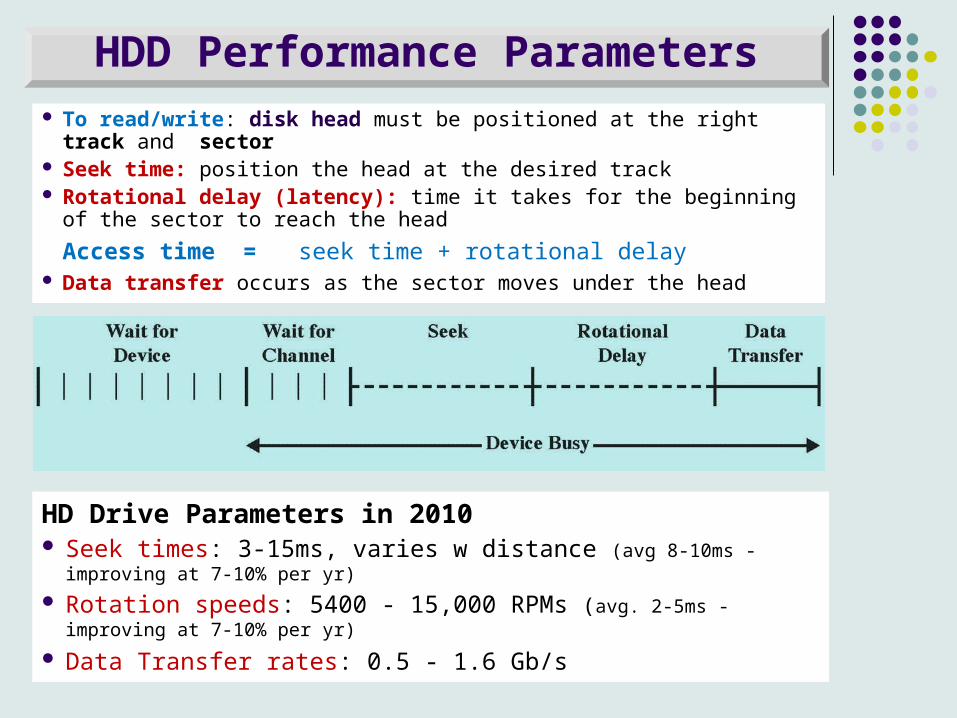
To read/write: disk head must be positioned at the right track and sector Seek time: position the head at the desired track Rotational delay (latency): time it takes for the beginning of the sector to
reach the head
Access time = seek time + rotational delay Data transfer occurs as the sector moves under the head
HDD Performance Parameters
HD Drive Parameters in 2010 Seek times: 3-15ms, varies w distance (avg 8-10ms - improving at 7-
10% per yr) Rotation speeds: 5400 - 15,000 RPMs (avg. 2-5ms - improving at 7-
10% per yr)
Data Transfer rates: 0.5 - 1.6 Gb/s

Solid State Drive (SSD)
• SSDs have no moving mechanical components which distinguishes them from traditional HDDs
• uses electronic interfaces compatible with traditional HDDs
• More resistant to physical shock, run more quietly, have lower access time and less latency
• But, SSDs are more expensive per unit of storage than HDDs.
• While SSDs are more reliable than HDDs, SSD failures are often catastrophic, with total data loss. Whereas HDDs often give warning to allow much or all of their data to be recovered
Also known as
solid-state disk or
electronic disk
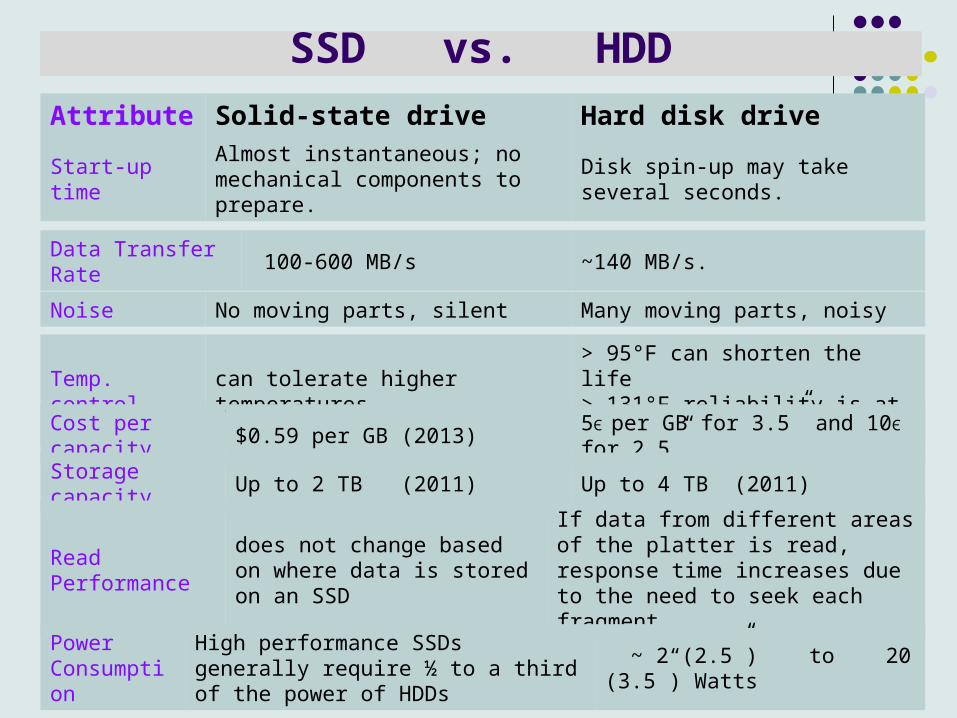
SSD vs. HDD
Attribute Solid-state drive Hard disk drive
Start-up timeAlmost instantaneous; no mechanical components to prepare.
Disk spin-up may take several seconds.
Data Transfer Rate 100-600 MB/s ~140 MB/s.
Noise No moving parts, silent Many moving parts, noisy
Temp. control can tolerate higher temperatures> 95°F can shorten the life> 131°F reliability is at risk
Cost per capacity $0.59 per GB (2013) 5Є per GB for 3.5” and 10Є for 2.5”
Storage capacity Up to 2 TB (2011) Up to 4 TB (2011)
Read Performance
does not change based on where data is stored on an SSD
If data from different areas of the platter is read, response time increases due to the need to seek each fragment
Power Consumption
High performance SSDs generally require ½ to a third of the power of HDDs
~ 2 (2.5”) to 20 (3.5”) Watts

Based on the Requester
First-in, First-out (FIFO) Fair to all processes
Priority by Process (PRI) Short batch jobs and interactive jobs may have higher priority Good interactive response time
Last-in, First-out (LIFO) Good for transaction processing systems
The device is given to the most recent user so there is little arm movement Starvation is possible if a job is fallen back from the head of the queue
For a single disk there will be a number of I/O requests If requests are serviced randomly worst possible performance Access time is the reason for differences in performance
Disk Scheduling Policies for HDDs

Based on the Requested Item
Shortest Service Time First (SSTF) Always choose the minimum Seek time and select the one that requires
the least movement of the disk arm from its current position
SCAN (Elevator Algorithm) Arm moves in one direction only, satisfying all outstanding requests
until it reaches the last track in that direction. Then direction is reversed
C-SCAN (Circular SCAN) Restricts scanning to one direction only (i.e. like a typewriter), After one
scan, the arm is returned to the beginning to start a new scan. This reduces the maximum delay experienced by new requests.
N-step-SCAN Segments the disk request queue into subqueues of length N which are
processed one at a time, using SCAN New requests added to other queues while the current queue is processed
FSCAN two queues; one queue is serviced while the other is filled with new
requests
Disk Scheduling (cont.)

RAID (Redundant Array of Independent Disks)
The rate of improvement in secondary storage performance has been much less than that of the microprocessor
Use many disks in parallel to increase storage bandwidth, also improve reliability Files are striped across disks Each stripe portion is read/written in parallel Bandwidth increases with more disks
Redundancy is added to improve reliability
RAID 0disk array butNo redundancy

• Redundancy is achieved by duplicating all the data• Each logical strip is mapped to two separate physical disks• A read request can be serviced by either of the two disks• A write request requires that both strips be updated; but can be done in
parallel real-time back-up• When a drive fails, data can still be accessed from the mirror disk
• Disadvantage: cost is doubled• typically limited to drives that store highly critical data and system software
RAID 1 (mirrored)

• The strips are small; a single bit
• an error-correcting code is calculated across corresponding bits on each data disk, and bits of the code are stored in the corresponding bit positions on multiple parity disks.
• Typically Hamming code is used to be able to correct single-bit errors and detect double-bit errors.
• Costly; only useful when disk errors are very high; since disks are pretty reliable not used in practice
RAID 2 (error detection/correction)

• The strips are small; a single byte or a word
• Single redundant disk
• A simple parity bit is computed for the set of individual bits in the same position on all of the disks
RAID 3 (Bit-interleaved parity)

Buffer in main memory for disk sectors Contains a copy of some of the sectors on the disk
Least Recently Used (LRU) policy
The block that has been in the cache the longest with no reference to it is replaced
IMPLEMENTATION The cache consists of a stack of blocks When a block is referenced, it is placed on the top of the stack The block on the bottom of the stack is removed when a new block
is brought in Blocks don’t actually move around; pointers to the blocks are
moved
Disk Cache

















