22
Latest Developments in High Accuracy DGPS Dr David Russell Senior GNSS Technical Specialist VERIPOS, Subsea 7

Latest Developments in High Accuracy DGPS
Dr David RussellSenior GNSS Technical Specialist
VERIPOS, Subsea 7

Overview
Introduction
Satellite Positioning and the Offshore Industry
Methods of Improving Accuracy
– Relative GNSS
– PPP
Advantages/Disadvantages of the Two Methods
Veripos Systems
The Future

Satellite Positioning – a mature utility…still developing?
Offshore industry was an early adopter of satellite navigation technology
GNSS technology has made positioning and navigation more accessible to the wider community plus provided global coverage
GNSS is fundamental to all positioning and navigation offshore and is considered a mature technology
The offshore industry is a key stakeholder in all GNSS systems
The correct terminology?
– DGPS term is no longer representative
different satellite navigation systems (GLONASS, Galileo)
different techniques (e.g. PPP)
– We will refer to GNSS, DGNSS

DGNSS In The Offshore Oil and Gas Industry
Navigation and positioning for survey applications– Seismic survey, hydrographic survey, construction and
pipe-lay support– Positioning of vessels and structures– Requires high levels of accuracy and redundancy to
ensure high-quality data
Navigation and positioning for vessel station-keeping– Dynamic positioning / mooring monitoring– Stability of position - more important than accuracy– Other reference systems such as acoustics, taut-wire –
mean less dependence on DGNSS except in deep water where there is likely to be greater dependence on DGNSS
– Critical to vessel operation
In offshore operations there are 2 x types of requirement

Set the scene - what are the errors in GNSS?
What are we trying to measure
Errors in satellite navigation can be divided in to 2 broad categories:
– Temporal – those that change with time
– Spatial – those that change with location
Furthermore errors can relate to:– The satellites
– The radio signal in space
– The receiver on the ground
Main Errors
Satellite orbit error (O)
Satellite clocks (C)
Atmospheric effects
Signal delay due ionosphere (I)
Signal delay due troposphere (T)
Signal reflections at user receiver (M)
Errors in user equipment
IonosphereTroposphere
I
T
O
C
M
True SV PosCalc SV Pos
True distancesignal p
athMea
sured
distan
ce
we need to remove this
Methods of Improving GNSS Accuracy
There are two key yet very different methods in use today for improving GNSS
accuracy:
– Relative GNSS (a.k.a. Differential, RTK)
– Precise Point Positioning (a.k.a. PPP, State-Space, Globally Corrected GPS, SDGPS)
Each method also provides integrity information on the GNSS constellation:
– Independent check on each GNSS satellite signal
– Determine whether data is good or bad

Principals of Relative GNSS (DGPS)
Requires a number of precisely located GNSS reference stations where the measurement error to each satellite is calculated by comparing known and measured range
Errors remain similar for other GNSS users within several hundred kilometres of reference station
Error information is delivered to the user via satellite or terrestrial radio broadcast
Robustness is improved by using data from multiple reference stations and multiple broadcasts
Nominal accuracy is 1-2m within 1000Km and <3m within 2000Km of a station
As the distance between the user and reference station increases, accuracy decreases:– De-correlation of orbit error– De-correlation of ionosphere delays

DGNSS
R1
R2R3
R1 Ref
R2 Ref R3 Ref
ReferenceStation
GPSReceiver
CorrectionProcessor
R1 R2 R3

High Accuracy DGNSS
Accuracy improvements to the standard DGNSS solutions have been made through the following:
– More precise correction information using measurements approaching carrier phase accuracy
– Improved troposphere modelling– Removal of Ionosphere effects– Inclusion of satellite orbit corrections leading to reduced spatial de-correlation
Other techniques include extending the range of the real time kinematic systems:– Double differencing– Centimetre accuracy – Raw data transmissions lead to high-bandwidth requirements and prevent operation over
satellite links
Examples include Thales Genesis, Fugro HP, VERIPOS-Extra
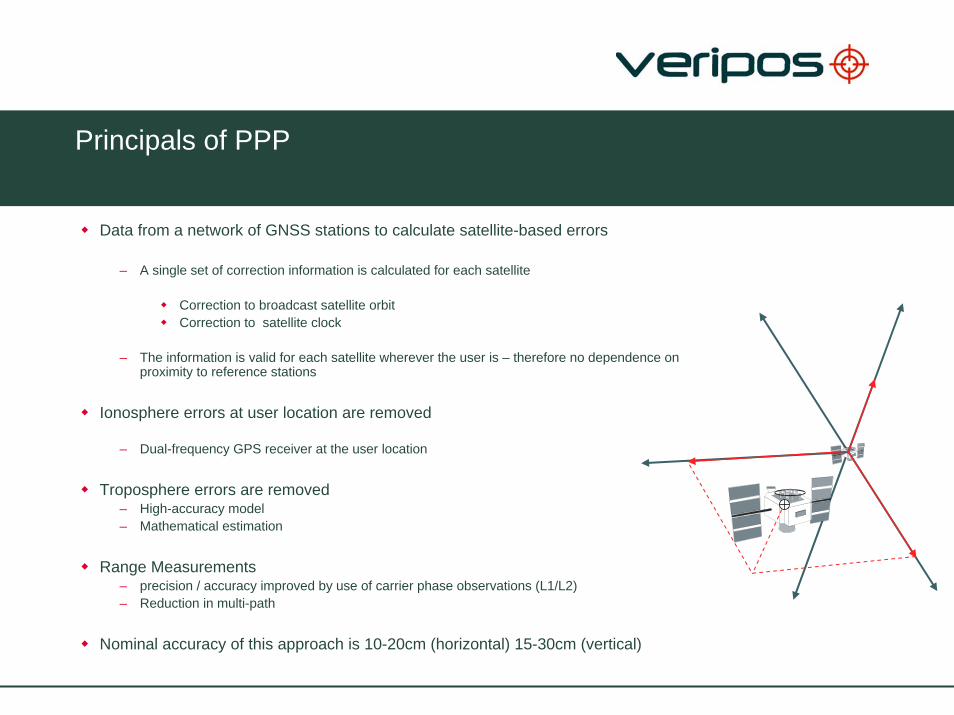
Principals of PPP
Data from a network of GNSS stations to calculate satellite-based errors
– A single set of correction information is calculated for each satellite
Correction to broadcast satellite orbitCorrection to satellite clock
– The information is valid for each satellite wherever the user is – therefore no dependence on proximity to reference stations
Ionosphere errors at user location are removed
– Dual-frequency GPS receiver at the user location
Troposphere errors are removed – High-accuracy model– Mathematical estimation
Range Measurements – precision / accuracy improved by use of carrier phase observations (L1/L2)– Reduction in multi-path
Nominal accuracy of this approach is 10-20cm (horizontal) 15-30cm (vertical)

PPP - Overview
apply calculated SV clock error correction to broadcast ephemeris value
apply satellite orbit corrections to broadcast orbit position
iono error is calculated using dual-frequency mobile GPS hardware
tropo delays minimised using model plus residual error is estimated as part of the calculation process
measurement noise and multipath minimised using carrier phase observable
Dz
XTrue SV Position
erroneous SV Position
Y
Dy
DxZ
SV Clock
iono del
ay
tropo
delay
sig reflections
PPP Mathematical Approaches
Kalman-Filter Approach
– use iono-free observable
– filter over time to resolve carrier phase integer ambiguities
– filter also used to resolve other residual errors (e.g. Tropo)
– model to account for user dynamics
Non Kalman-Filter Approach
– uses iono-free observable
– epoch-epoch calculation (no dynamic model required)
– carrier phase integer ambiguities are estimated
PPP Convergence
With a Kalman-Filter approach convergence of the PPP solution is variable
Convergence linked to change in relative satellite geometry
– more observations and measurements help with the estimation of parameters
Certain values that are being estimated vary slowly over time (e.g. troposphere)
Convergence time can be reduced by using
– known start position
– more accurate a-priori information
– More satellites/observations

Advantages & Disadvantages of Each Method
DGNSS PPP
Advantages- simple and robust solution
- redundancy with many independent stations
Advantages- user has no reliance on reference stations
- corrections are valid globally
Disadvantages- reliance on reference stations
- error de-correlation with distance leading to degradation in accuracy
Disadvantages- complex single process (glitch can have global effect)
- geodetics and the relationship to DGNSS

Veripos Services
VERIPOS Standard L1 DGPS 1-2m accuracy
VERIPOS Standard+ L1/L2 DGPS 1-2m accuracy
VERIPOS Ultra PPP 20cm accuracy
VERIPOS Extra HA-DGNSS 20cm accuracy (launch 2006)
VERIPOS HF L1 DGPS 1-3m accuracy (regional coverage)
VERIPOS DGLONASS L1 DGLONASS 1-3m accuracy (regional coverage

Veripos Standard+
Same as VERIPOS-Standard (DGNSS) but dual-frequency GNSS
Based upon CA/P-Code and L1/L2 phase measurements
Coverage in areas of heightened ionospheric activity
Ionospheric delays for each SV at each station transmitted to permit compensation
Typical single station accuracy is 1-2m within 2000km
Simple, robust and highly resilient solution

Standard DGNSS v Standard+
veripos-standard+veripos-standard
Typical single station accuracy (2.16m) – baseline 800km (Brazil) Typical single station accuracy (0.74m) – baseline 800km (Brazil)
• Standard graph shows degradation of dgps solution due to none-cancellation of ionosphere
• Standard+ plot shows the reinstatement of iono-cancellation achieved by iono measurement

Veripos Ultra
Singapore
Hz error 0.13m (95%) – including convergence
Vt error 0.32m (95%) – including convergence

Comparison of Veripos Ultra & Standard
Future Developments & the Impact on Positioning
DGNSS users will see significant changes in the satellite navigation over the next 10 to 20 years
This will include the availability of more satellites and also more navigation signals which will provide greater positional accuracy and reliability
GNSS will have more redundancy because of the multiple constellations and no reliance on one system
The actual combination of signals to be used will be determined by the application and will be a trade-off between cost, accuracy and receiver design
Modernised constellations and Galileo clearly show that satellite navigation will continue to the system of choice for navigation and surveying in the offshore industry

What the Future Holds for the User
Combined GPS / GLONASS / Galileo constellations will provide up to 80 satellites
Availability of new signals
Greater position accuracy – attainable accuracy is finite (~5cm)
Faster, more robust initialization
Greater integrity and availability providing more robust positioning
Different signal combinations to suit different market requirements
Development of new positioning techniques?

Questions?

















