24
6-1 Lecture Note #6 (Chap.10) CBE 702 Korea University Prof. Dae Ryook Yang System Modeling and Identification

6-1
Lecture Note #6(Chap.10)
CBE 702Korea University
Prof. Dae Ryook Yang
System Modeling and Identification

6-2
Chap.10 Model Approximation
• Model approximation– Simplification, approximation and order reduction of models
• Model reduction– Model order reduction in a linear system
• Balanced realization• Pade approximation• Moment matching• Continued fraction approximation
– Model approximation of a nonlinear system by a linear one• Linearization• Describing function analysis
– Approximation of the nonlinear system by ignoring higher-orderharmonics

6-3
• Linearization– Nonlinear differential equation:– Linearization:
• Discretization– Sampling time: h
where
• Some heuristic model reduction methods (For linear system only)
– Polynomial truncation
– Method of dominating poles
– Pole-zero cancellations
( , )x f x u=&0 0 0 0 0 0 0( , )( ) ( , )( )x ux f f x u x x f x u u u≈ + − + −&
1( ) ( ) ( )
( ) ( )k k k
k k
x x ux t Fx t Gu t
y Cxy t Cx t
Φ Γ+ = += + ⇒ ==
&
0and
hFh Fse e GdsΦ Γ= = ∫
1 1 2 1 1 1( ) 0.22 /(1 0.7 0.08 ) 0.22 /(1 0.8 )(1 0.1 )H z z z z z z z− − − − − −= − − = − +
1 11( ) 0.3 /(1 0.7 )H z z z− −= −
1 12( ) 0.2 /(1 0.8 )H z z z− −= −
1 13( ) 1.1 /(1 0.1 )H z z z− −= + Cancel (1−0.8z-1) with (1−0.78z-1)

6-4
Balanced Realization andModel Reduction
• The Reachability Gramian
– What states can be reached with a given input energy assuming that x0=0?– Given finite input energy:– States:
– Input Sequence for desired xN:
1: k k k nk
k k
x x uS x R
y CxΦ Γ+ = +
∈ =
1( ) N T
uu k kkJ u e u u E
== = ≤∑
1 21 0 N-11
[ ][ u ]N N k N N TN k N Nk
x u u UΦ Γ Φ Φ Γ ψ− − −−=
= = =∑ L L1( )T T
N N N N NU xψ ψ ψ−=1
1( ) N T T T
k k N N N N NkJ u u u U U x P x E−
== = = ≤∑
1
0where ( ) 0NT k T T k
N N N kP ψ ψ Φ ΓΓ Φ−
== = ≥∑
Bound on the reachable states at time N
PN : Reachability Gramian
1 0T T T TN NP P P PΦ Φ ΓΓ Φ Φ ΓΓ+ = + ⇒ − + = Lyapunov equation

6-5
• The Observability Gramian– What states energy is necessary for all uk=0 in order to obtain a specified
output energy?– Specified output energy:
– Reachability Gramian decides the minimum input energy to drive a systemfrom x0 to xN.
– Observability Gramian decides the maximum output energy that the initialstate x0 can generate.
0( ) T
yy k kkJ y e y y E∞
== = =∑
10 00
( ) T Tk kk
J y y y x Q x E∞ −=
= = =∑1 0 ( 0, )k
k k k ky Cx C x C x u kΦ Φ−= = = = = ∀L ∵
0where ( ) 0T k T k
kQ C CΦ Φ∞
== ≥∑ Q : Observability Gramian
0T T T TQ Q C C Q Q C CΦ Φ Φ Φ= + ⇒ − + = Lyapunov equation
1 10
( ( ) )T T T k T k Tk
Q C C C C CCΦ Φ Φ Φ Φ∞ + +=
+ = + =∑

6-6
• Balanced Realization– Reachability and observability Gramians P and Q define matrices that
describe the sensitivity of the input-output map in different directions ofstate space.
– Consider a state-space transformation zk=Txk, then the system becomes
– Different state-space realization may result in different Gramians– Balanced realization: Pz=Qz
– Algorithm using Cholesky factorization
– If some σi’s are relatively small, the Σ can be reduced and the resultingtransformation produces a balanced model resuction.
11
1: k k k
k k
z T T z T uS
y CT z
Φ Γ−+
−
= +
=1
Tz
Tz
P TPTQ T QT− −
=⇒
=
1 2( , ) (where ( ))z z i iP Q diag PQΣ σ σ σ λ= = = =L
1 1
21 1
1 1
( )
T
T T T
T
Q Q Q
Q PQ U U U U IΣ
Σ Σ Σ
=
= =
=
11 1
TT U QΣ −⇒ =
Hankel singular value

6-7
• Example 10.1 (Balanced model reduction)
– Controllable canonical realization
– Balanced realization
1 1 2: ( ) 0.22 /(1 0.7 0.08 )S H z z z z− − −= − −
1
0.7 0.08 1
1 0 0k k kx x u+
= +
( )0.22 1k ky x=
0.1157 0.00700.0070 0.0007
P
=
2.3902 1.81861.8186 2.3902
Q
=
0.4579 0.02880.1018 0.1295
T
= −
0.5510 00 0.0169
Σ
=
1
1.5460 1.17630 1.0032
Q
=
1
0.7423 00 0.1300
Σ
=
From Lyapunov equation
1
0.7869 0.1079 0.45790.1079 0 0.0869 0.1018k k kz z u+
= + − −
( )0.4579 0.1018k ky z= −

6-8
– Reduced model• Since first singular value is dominant, second variable can be reduced
as if it has no dynamics (zk +1= zk). 0.5510 00 0.0169
Σ
=
0 1 0 0 1 101 00 0 01 01 0( ) ( )k k k k k k kz z z u z I z uΦ Φ Γ Φ Φ Γ−= + + ⇒ = − +
1 111 10 11
0 001 00 01
k kk
k k
z zu
z z
Φ Φ ΓΦ Φ Γ
+
+
= +
1 1 1 11 11 10 01 01 0 1
1 1 111 10 01 01 1 10 01 0
( ) ( )
( ( ) ) ( ( ) )k k k k k
k k
z z I z u u
I z I u
Φ Φ Φ Φ Γ Γ
Φ Φ Φ Φ Γ Φ Φ Γ
−+
− −
= + − + +
= + − + + −1 1 1
1 2 01 01 0
1 1 11 2 01 01 10 01 0
( ) ( )
( ( ) ) ( )k k k k
k k
y C z C I z u
C C I z C I u
Φ Φ Γ
Φ Φ Φ Γ
−
− −
= + − +
= + − + −
1 0.7976 0.4478k k kz z u+ = +
0.4478 0.0095k k ky z u= +

6-9
• Balanced model reduction for continuous systems
– x0 is assumed to have no dynamics
• This method preserves the essential low-frequency properties (gain).
– The reduced-order state-space model
– Other choices• ,• ,
– Comparison
1 111 10 1
0 001 00 0
A A Bx xu
A A Bx x
= +
&& ( )
1
1 0 0
xy C C Du
x
= +
0 1 1 100 01 00 0
0 and 0 x A A x A Bx u− −= = − −&
1 1 1 111 10 00 01 1 10 00 0
1 1 11 0 00 01 0 00 0
( ) ( )
( ) ( )
x A A A A x B A A B u
y C C A A x D C A B u
− −
− −
= − + −
= − + −
& Direct transmission term
(non-zero even if D=0)
0 0x ≈ 1 1 111 1 1x A x B u y C x Du= + = +&
0 0x xα≈& 1 1 1 111 10 00 01 1 10 00 0
1 1 11 0 00 01 0 00 0
( ( ) ) ( ( ) )
( ( ) ) ( ( ) )
x A A I A A x B A I A B u
y C C I A A x D C I A B u
α α
α α
− −
− −
= − − + − −
= − − + − −
&
0 0 ( ) ( )redx x G Gα α α≈ ⇒ =&0 0 ( ) ( )redx G G≈ ⇒ ∞ = ∞0 0 (0) (0)redx G G≈ ⇒ =&

6-10
• Example 10.2 (Rohr’s system)
– Reduced second-order model
– Reduced first-order model
0.6683 1.6355 0.6166 1.2136
1.6355 8.2111 7.4027 1.33800.6166 7.4027 22.1206 0.5634
x x u
− − − = − − + − − −
&
( )1.2136 1.3380 0.5634y x=
1.1018 0 00 0.1090 00 0 0.0072
Σ =
1.2136 38.6514 345.41911.3380 32.6780 26.8176
0.5634 5.6501 5.1795
T = − − −
0.6512 1.8419 1.19791.8419 10.6884 1.5266
x x u− −
= + − − &
( )1.1979 1.5266 0.0144y x u= +
0.9686 1.4610x x u= − +&1.4610 0.2037y x u= −
1( ) 2/( 1)G s s= +
2 2
0.8955 20.5561( ) 0.014411.3395 10.3523
sG ss s
− += ++ +
2
2 229( )( 1) 30 229
G ss s s
=+ + +
2/(s+1)

6-11
Continued Fraction Approximation– For an asymptotically stable system
– With 2m coefficients, the approximating transfer function is m-th order.
– Calculation of coefficients
12
1
( ) 1( ) 1( )
( )
B sG s
A s cc R ss
= ≈+
+
1
34
2
1( ) 1
( )
R sc
cR s
s
≈+
+
2
56
3
1( ) 1
( )
R sc c
R ss
≈+
+
L
( )( ) (with 0)
( )m
m mm
B sG s R
A s= ≈
( 2)0 1( ) ( )A s a a s P s−= + + =L ( 1)
0 1( ) ( )B s b b s P s−= + + =L1 0 0
02 0 0
0 13 0 0
12 0 0
///
/i ii
c a bc b pc p p
c p p−+
=
M M
M M
0 1 1
0 1 2(0) (0) (0)0 1 2
( ) ( ) ( )0 1 2i i i
a a ab b b
p p p
p p p
LLL
MM
MRouth array
( ) ( 2) ( 2) ( 1) ( 1)1 0 1 0/i i i i i
k k kp p p p p− − − −+ += −

6-12
• Interpretation of continued fraction approximation– The model reduction presuppose that
the inner most TF block may be eliminated.
– The condition for good approximation:
– For discrete-time system
( ) 0mR s ≈
2 0/ ( )m m s
c s R s=
?
12 1 1
1 2 1
( ) ( ) ( )( ) ( ) ( )
i i i i
i i i i
Y z c z U z Y zU z c Y z U z
−+ +
+ −
= += − +
1 11 2 1 2 2
1 2 1
( ) ( )1( ) ( )1
i ii i i
i ii
Y z Y zc c z c zU z U zc
− −+ −
+ −
+ − ⇒ = −
112
112 1 2 1 2
( ) ( )1( ) ( )1
i ii
i ii i i
Y z Y zc zU z U zc c c z
−+
−+− −
= + (Used in lattice algorithms)
Unimodular (det=1)

6-13
• Example 10.3
– Routh array
– Reduced-order models
3 2 2 3
458 2( )
31 259 229 1 1.131 0.1354 0.0044G s
s s s s s s= =
+ + + + + +
1.0000 1.1310 0.1354 0.00442.0000 0 0 01.1310 0.1354 0.00440.2394 0.0078
0.0986 0.00440.00290.0044
− −
1
2
3
4
5
6
0.50001.7683
4.7242.427
34.029
0.6591
ccccc
c
=== −⇒= −=
=
1
1 2( )
0.5 /1.7683 1 1.130G s
s s= =
+ +
2
2
1( )
0.5 1/(1.7683/ 1/( 4.7236 /2.4273))2 0.065
1 1.0985 0.0986
G ss s
ss s
=+ + − −
−=
+ +
2/(s+1)
6-14
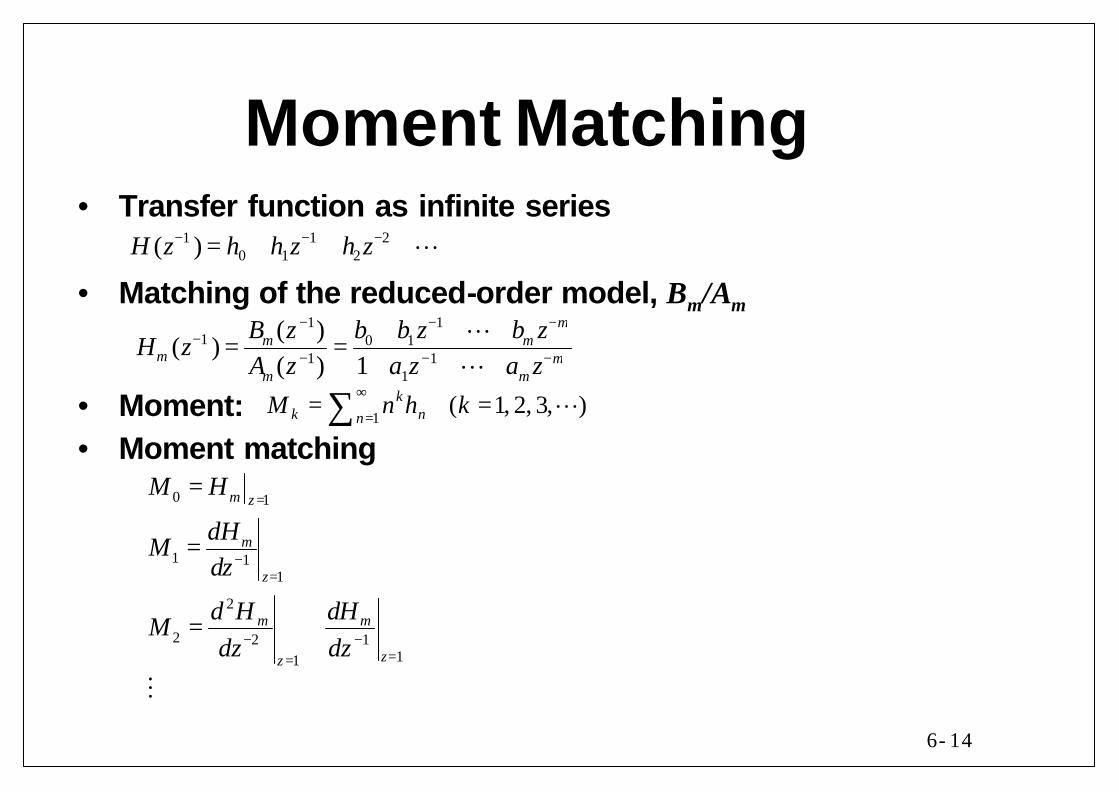
Moment Matching• Transfer function as infinite series
• Matching of the reduced-order model, Bm/Am
• Moment:• Moment matching
1 1 20 1 2( )H z h h z h z− − −= + + +L
1 11 0 1
1 11
( )( )
( ) 1
mm m
m mm m
B z b b z b zH z
A z a z a z
− − −−
− − −
+ + += =
+ + +LL
1( 1, 2, 3, )k
k nnM n h k
∞
== =∑ L
0 1
1 11
2
2 2 111
m z
m
z
m m
zz
M H
dHM
dz
d H dHM
dz dz
=
−=
− −==
=
=
= +
M

6-15
• Example 10.4 (Moment matching)
– Reduced-order model
– Moment matching
– Reduced first-order model
11 1 2 3
1 2
0.22( ) 0.22 0.154 0.1254
1 0.7 0.08z
H z z z zz z
−− − − −
− −= = + + +− −
L
1 11 0 1
1 11
( )( )
( ) 1m
mm
B z b b zH z
A z a z
− −−
− −
+= =
+
0 11
1
1 0 11 2
1 1
2 21 0 1 1
2 311
11
4.9091(1 )
( )2 39.1074(1 )
m z
m
z
m
z
b bH
a
dH a b bdz a
d H a b a bdz a
=
−=
−=
+= =
+
− += =
+
−= =+
M
11
1 1
0.0149 0.1858( )
1 0.7993z
H zz
−−
−
+=
−

6-16
Pade Approximation• Truncated Taylor series expansion
• Pade approximation
• Example 10.5
– First order:
– Second order:
2 10 1 2 1
( )( ) ( )
( )m
m mB s
G s G s g g s g sA s
−−= ≈ = + + +L
( ) ( ) ( )m m mB s G s A s=
2 33 2
( ) 458( ) 2 2.262 2.2876 2.2898
( ) 31 259 229Y s
G s s s sU s s s s
= = ≈ − + − ++ + +
L
1 1 0 1( ) / ( ) /(1 )B s A s b a s= +
22 2 0 1 1 2( ) / ( ) ( )/(1 )B s A s b b s a s a s= + + +
0 1 1 1/(1 ) 2 2.262 ( ) / ( ) 2 /(1 1.131 )b a s s B s A s s+ = − ⇒ = +
2 2 30 1 1 2
22 2
( ) /(1 ) 2 2.262 2.2876 2.2898
( ) / ( ) (2 0.0645 )/(1 1.0987 0.0989 )
b b s a s a s s s s
B s A s s s s
+ + + = − + −
⇒ = − + +
6-17
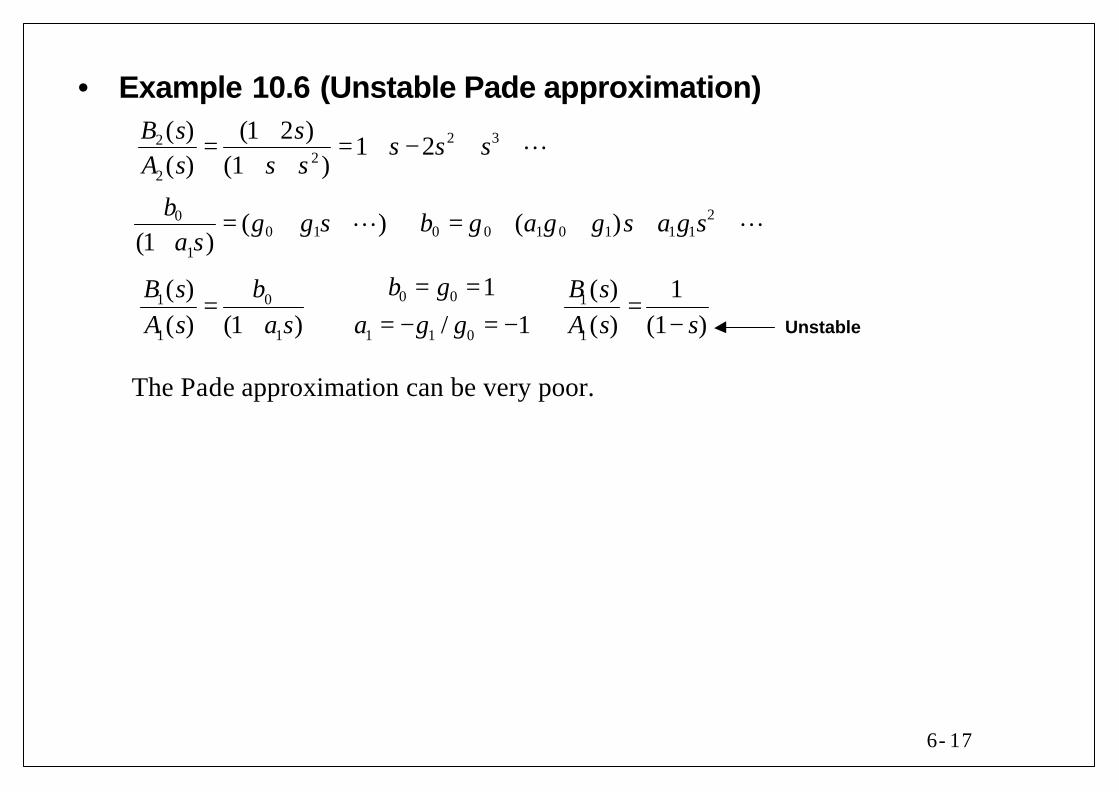
• Example 10.6 (Unstable Pade approximation)
The Pade approximation can be very poor.
2 322
2
( ) (1 2 )1 2
( ) (1 )B s s
s s sA s s s
+= = + − + +
+ +L
0 001 1
1 1 01 1 1
1( ) ( ) 1/ 1( ) (1 ) ( ) (1 )
b gbB s B sa g gA s a s A s s
= == ⇒ ⇒ = = − = −+ −
200 1 0 0 1 0 1 1 1
1
( ) ( )(1 )
bg g s b g a g g s a g s
a s= + + ⇒ = + + + +
+L L
Unstable

6-18
Describing Function Analysis• Analysis of Linear systems
– Laplace and Fourier transforms
• Describing function analysis– Extension of frequency analysis to nonlinear systems– Based on harmonic analysis– Assumptions
• Assumed periodic solution is sufficiently close to sinusoidal oscillationy(t)=Csin(ωt).
• The nonlinearity can be represented by u=n(x,x’).
– Fourier series expansion( )
0 1 1 1
1( ) cos( ) sin( )
2ki kx
k k kk k kf x a a kx a kx c e ϕ∞ ∞ ∞ +
= = == + + =∑ ∑ ∑
/ 2 /2
/2 /2
2 2where ( )cos( ) , ( )sin( )
T T
k kT Ta f t kt dt b f t kt dt
T T− −= =∫ ∫
2 2 , arctan( / )k k k k k kc a b a bϕ= + =

6-19
– Description of periodic oscillation with input amplitude C
• Describing function N(C) is obtained as the amplitude dependent gain|N(C)| and its phase shift ϕ1(ω) for the nonlinear elements.
• Harmonics caused by nonlinearities are ignored in describing functionanalysis
• Characteristic equation
– If the Nyquist curves of G0(iω) and −1/N(C) cross, it indicates the possibleexistence of a limit cycle with amplitude C and frequency ω0.
11 1 1( )( ) ic C b ia
N C eC C
ϕ += =
/ 2
/ 2
/ 2
/ 2
2where ( sin , cos )cos( ) ,
2( sin , cos )sin( )
T
k T
T
k T
a n C t C t kt dtT
b n C t C t kt dtT
ω ω ω
ω ω ω
−
−
=
=
∫
∫
Describing function
0( )
( ) ( ) ( ) ( ) ( , ) 0, /( )
B sG s A p x t B p n x x p d dt
A s= ⇒ + = ≡&
0(1 ( ) ( )) ( ) 0G p N C x t+ =
0 ( ) 1/ ( )G p N C= −
6-20
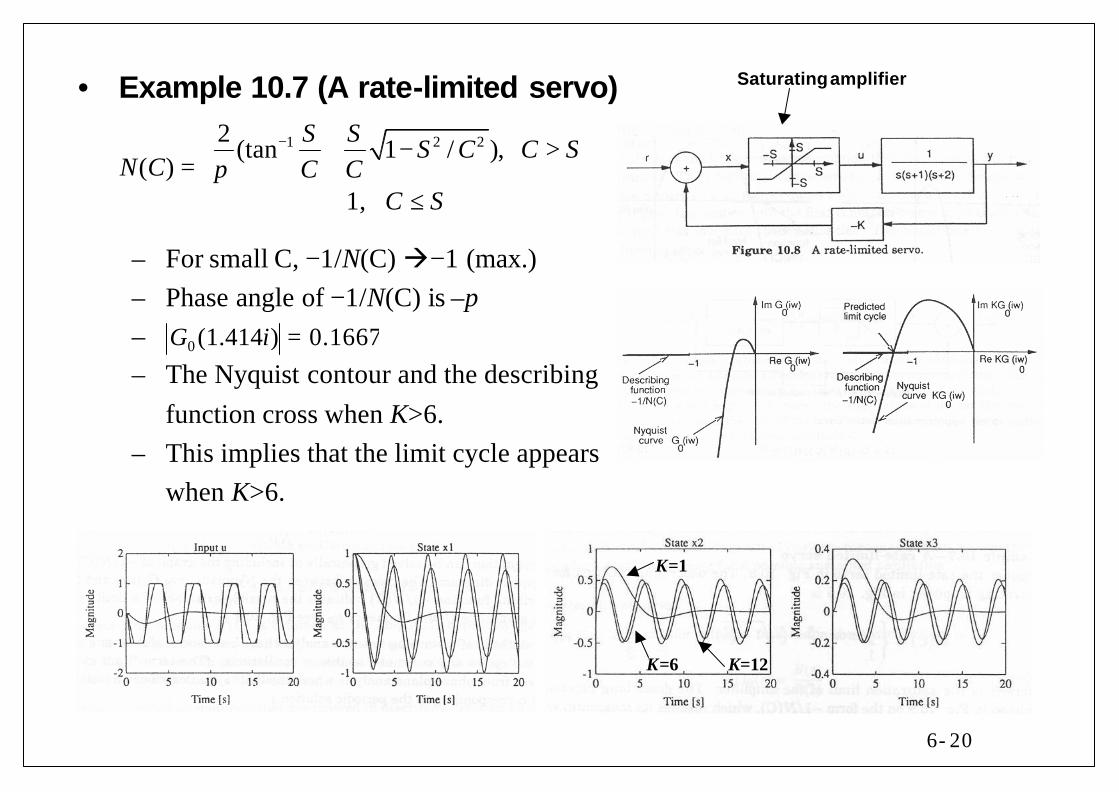
• Example 10.7 (A rate-limited servo)
– For small C, −1/N(C)à−1 (max.)– Phase angle of −1/N(C) is –π–– The Nyquist contour and the describing
function cross when K>6.– This implies that the limit cycle appears
when K>6.
1 2 22(tan 1 / ),
( )1,
S SS C C S
N C C CC S
π− + − >=
≤
Saturating amplifier
0 (1.414 ) 0.1667G i =
K=1
K=6 K=12

6-21
• Condition of application– Assumption: the input to nonlinearity is a sinusoid– Linear element is usually low-pass: higher harmonics will be attenuated– The conditions
•• G0(s) must not have any imaginary poles s=ik.• The function n(x,x’) should have finite partial derivatives w.r.t. x and x’
and must not be an explicit function of time.• The zero-order coefficient c0=0 of n(x,x’).
– If the prerequisites are not satisfied, the describing function analysis maypredict oscillations that do not exist and may fail to predict periodicsolutions that indeed do exist.
0 0 0( ) ( ) for 2,3, and ( ) 0 asG ik G i k G ik kω ω ω= → → ∞= L

6-22
• Example 10.8 (Pulse-width modulation, PWM)– PWM leads to asymmetric inputs– It requires more complicated analysis with a nonzero constant term c0 of
the describing function.– Consider a PWM system with switching nonlinearity
• The pulse-width modulating signal z is often a sawtooth-shaped signalof high frequency.
• The pulse-width modulated signal is a square wave with nonzero mean.
– If the modulating frequency ω z is high compare to G0(s), the highfrequency components deriving from z are efficiently absorbed by thelow-pass link G0(s).
0 1( ) ( , ) (1/ ) ( )u t n v v z x t n z= ≈ +& (n1 is the ordinary describing function terms)
0( ) (1/ ) ( )u t z x t≈ (linearized form)

6-23
Balanced Model Reduction inIdentification
• Usage of balanced model reduction– Further reduction from a linearized model– Identify a reduced-order linear model
• Identification assisted with model reduction– Estimation of high-order model (with sufficient excitation)– Model reduction with elimination of less important states
• Example 10.9 (Model reduction in identification)
– Identification as first-order model: biased
– Estimate 10-th order model, then reduce to first-order model
1: 0.9 0.1 ( 1)k k kS y y u d d+ = + + =
1 0.9838 0.2638k k ky y u+ = +
0.2912 0.0192k k ky x u= −1 0.9466 0.2912k k kx x u+ = + 0.0192 0.1029
( ) ( )0.9466z
Y z U zz
− +⇔ =
−

6-24
• Example 10.10 (An impulse response test)– Impulse response data
– State-space model for impulse response, g
– Balanced model reduction with n=2
( ) 1.2 (0.5) 0.2 (0.75)t tg t = ⋅ + ⋅
1
0 0 0 0 11 0 0 0 00 1 0 0
00 0 1 0 0
k k kx x u+
= +
LLO M
MO O O ML
( )0 1 1k n n ky g g g g x−= LImpulse response coefficients
( ) 1.38 (0.523) 0.38 (0.703)t tg t = ⋅ + ⋅

















