24
EE392m - Spring 2005 Gorinevsky Control Engineering 7-1 Lecture 7 - SISO Loop Analysis SISO = Single Input Single Output Analysis: • Stability • Performance • Robustness
EE392m - Spring 2005Gorinevsky
Control Engineering 7-1
Lecture 7 - SISO Loop Analysis
SISO = Single Input Single Output
Analysis: • Stability• Performance• Robustness
EE392m - Spring 2005Gorinevsky
Control Engineering 7-2
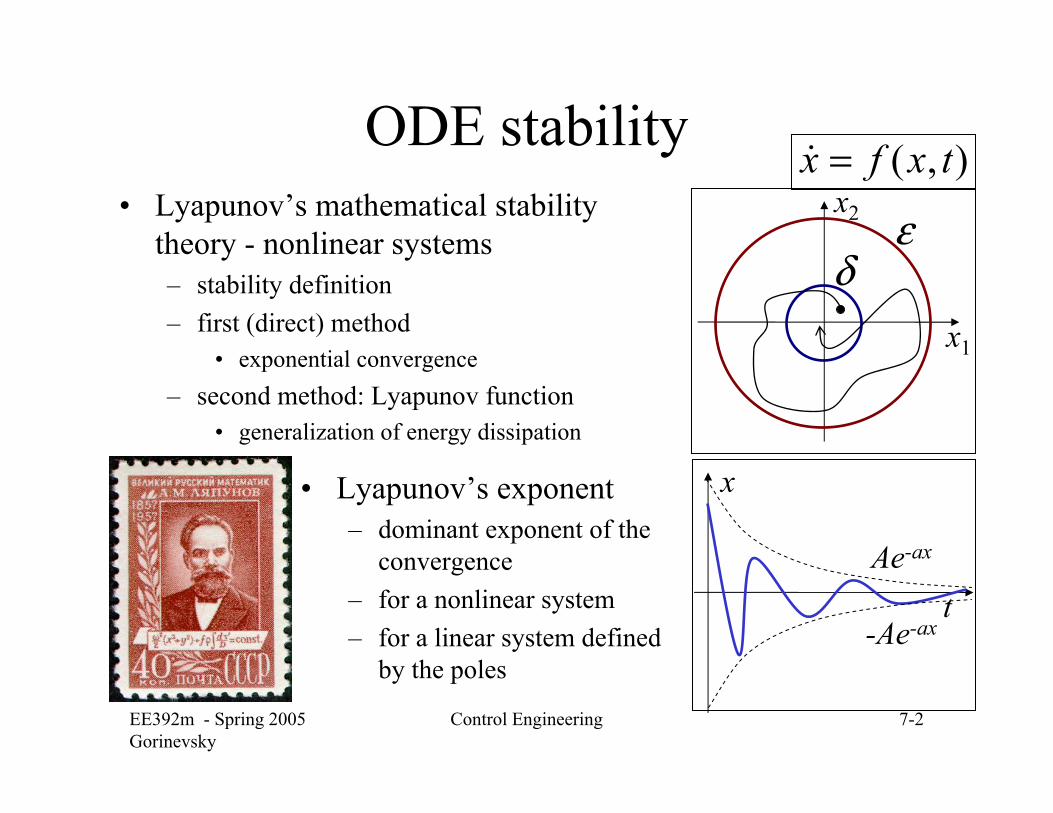
ODE stability• Lyapunov’s mathematical stability
theory - nonlinear systems– stability definition– first (direct) method
• exponential convergence– second method: Lyapunov function
• generalization of energy dissipation
x1
x2
• Lyapunov’s exponent– dominant exponent of the
convergence– for a nonlinear system– for a linear system defined
by the poles
t
x
Ae-ax
-Ae-ax
),( txfx =&
εδ
EE392m - Spring 2005Gorinevsky
Control Engineering 7-3
Stability: poles
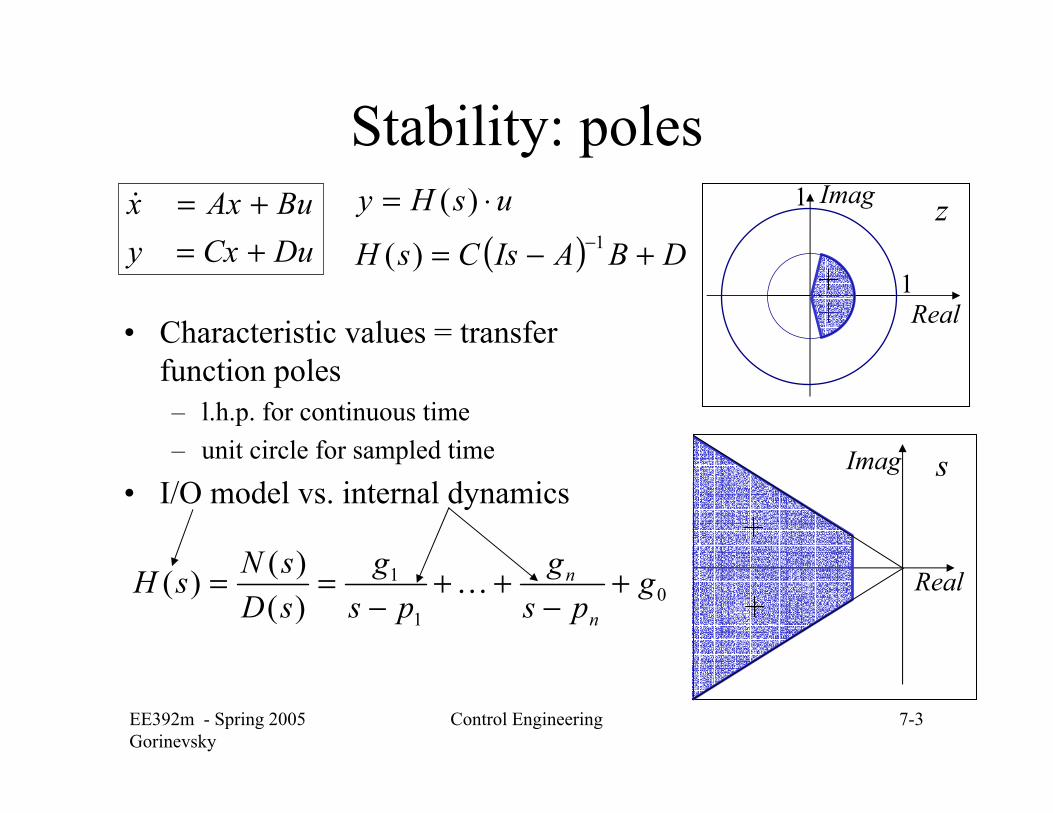
• Characteristic values = transfer function poles– l.h.p. for continuous time– unit circle for sampled time
• I/O model vs. internal dynamics
Real
Imag s
Real
Imag1
1
z( ) DBAIsCsH
usHy
+−=
⋅=−1)(
)(DuCxyBuAxx
+=+=&
01
1
)()()( g
psg
psg
sDsNsH
n
n +−
++−
== K
EE392m - Spring 2005Gorinevsky
Control Engineering 7-4
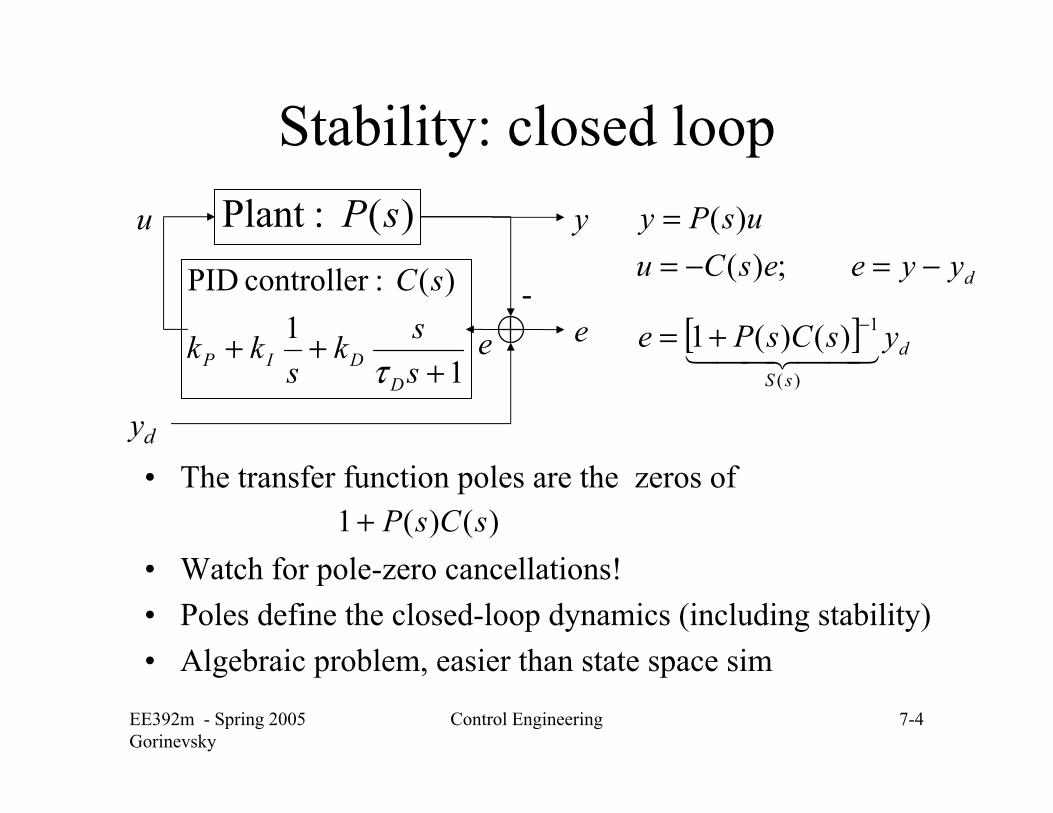
Stability: closed loop
• The transfer function poles are the zeros of
• Watch for pole-zero cancellations!• Poles define the closed-loop dynamics (including stability) • Algebraic problem, easier than state space sim
11
)( :controller PID
+++
ssk
skk
sC
DDIP τ
)( :Plant sP
-e e
y
yd
u
dyyeesCuusPy
−=−==
;)()(
[ ] d
sS
ysCsPe 44 344 21)(
1)()(1 −+=
)()(1 sCsP+
EE392m - Spring 2005Gorinevsky
Control Engineering 7-5
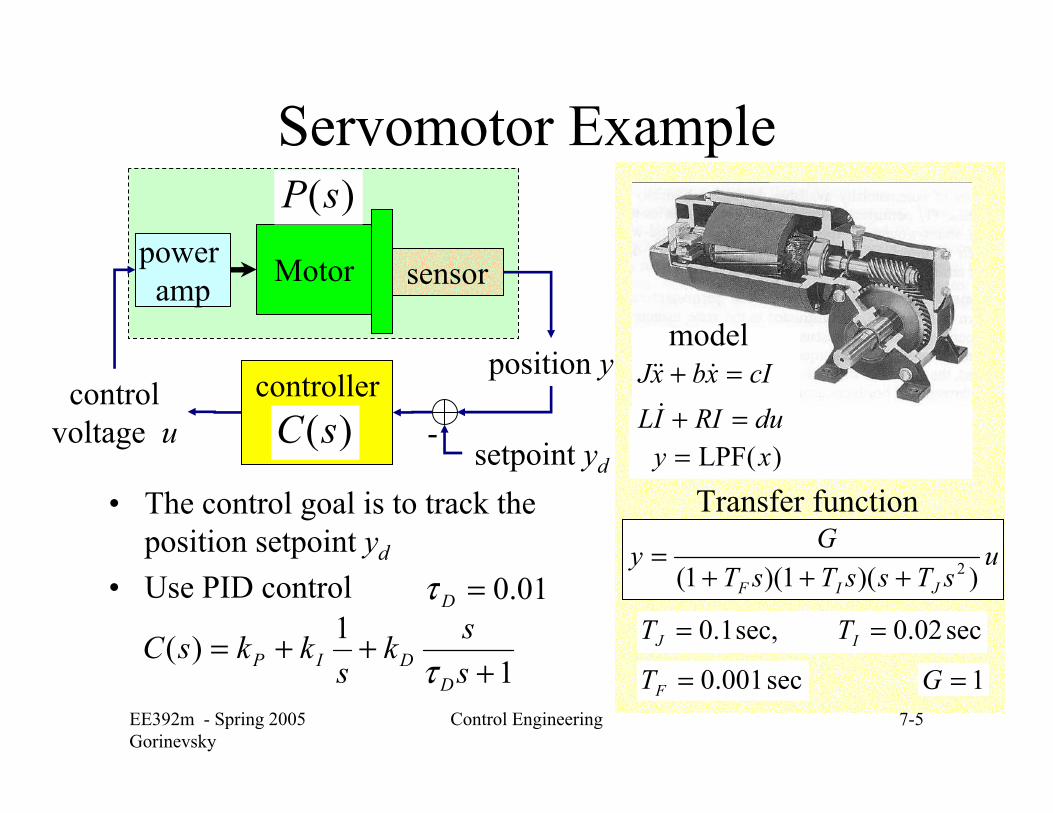
Servomotor Example
• The control goal is to track the position setpoint yd
• Use PID control
model
usTssTsT
GyJIF ))(1)(1( 2+++
=
Transfer function
sec02.0sec,1.0 == IJ TT
Motorpower amp sensor
position ycontrol
voltage usetpoint yd
controller-
)(LPF xy =duRIILcIxbxJ
=+=+
&
&&&
1=G
)(sP
)(sC
11)(
+++=
ssk
skksC
DDIP τ
01.0=Dτ
sec 001.0=FT
EE392m - Spring 2005Gorinevsky
Control Engineering 7-6
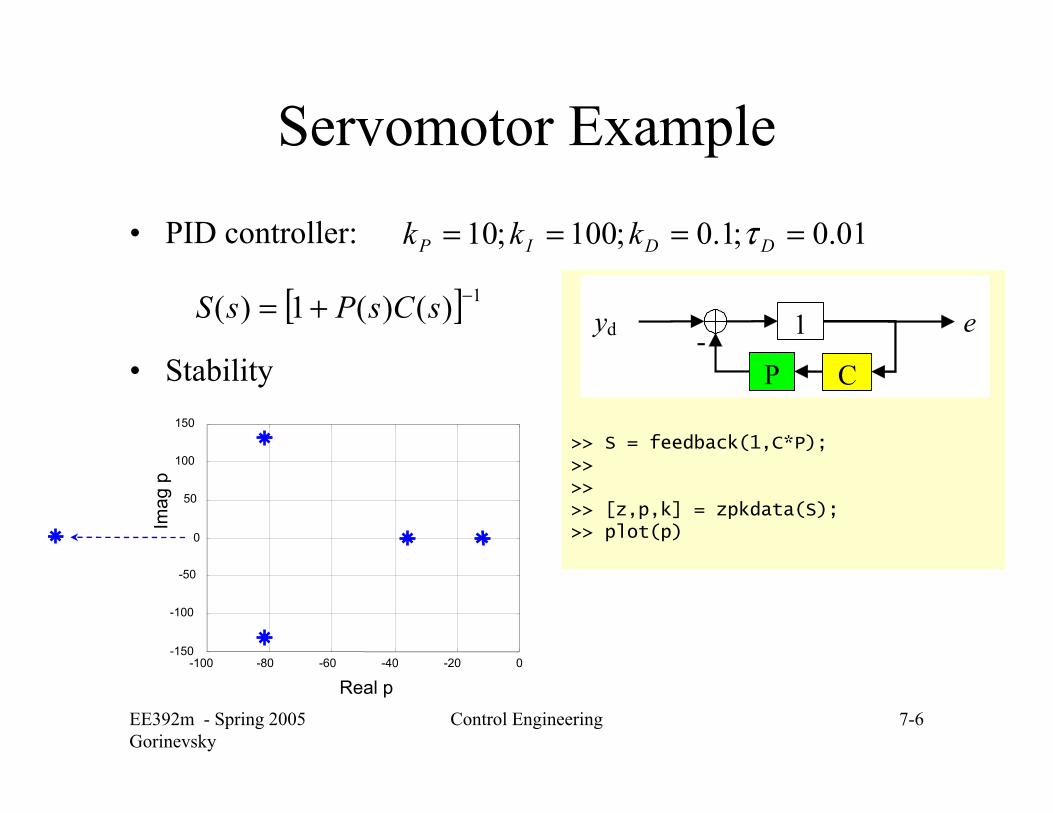
Servomotor Example
• PID controller:
• Stability
01.0;1.0;100;10 ==== DDIP kkk τ
[ ] 1)()(1)( −+= sCsPsS
>> S = feedback(1,C*P);>>>>>> [z,p,k] = zpkdata(S);>> plot(p)
e- 1yd
CP
-100 -80 -60 -40 -20 0-150
-100
-50
0
50
100
150
Real p
Imag
p
EE392m - Spring 2005Gorinevsky
Control Engineering 7-7
Stability
• … almost, except the critical stability• For nonlinear systems
– linearize around the equilibrium– might have to look at the stability theory -
Lyapunov• Orbital stability:
– trajectory converges to the desired– the state does not - the timing is off
• spacecraft• FMS, 3-D trajectories without aircraft
arrival time
For linear system poles describe stability
EE392m - Spring 2005Gorinevsky
Control Engineering 7-8
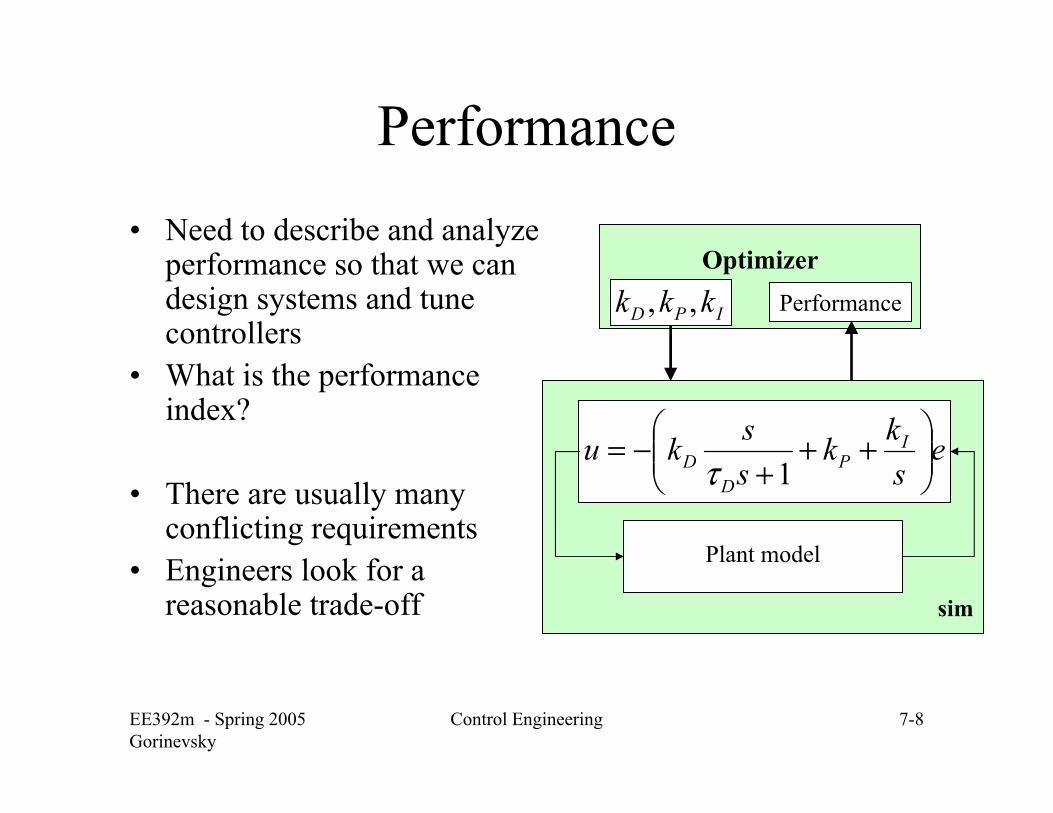
Performance• Need to describe and analyze
performance so that we can design systems and tune controllers
• What is the performance index?
• There are usually many conflicting requirements
• Engineers look for a reasonable trade-off sim
eskk
ssku I
PD
D ⎟⎟⎠
⎞⎜⎜⎝
⎛++
+−=
1τ
Plant model
Optimizer
IPD kkk ,, Performance
EE392m - Spring 2005Gorinevsky
Control Engineering 7-9
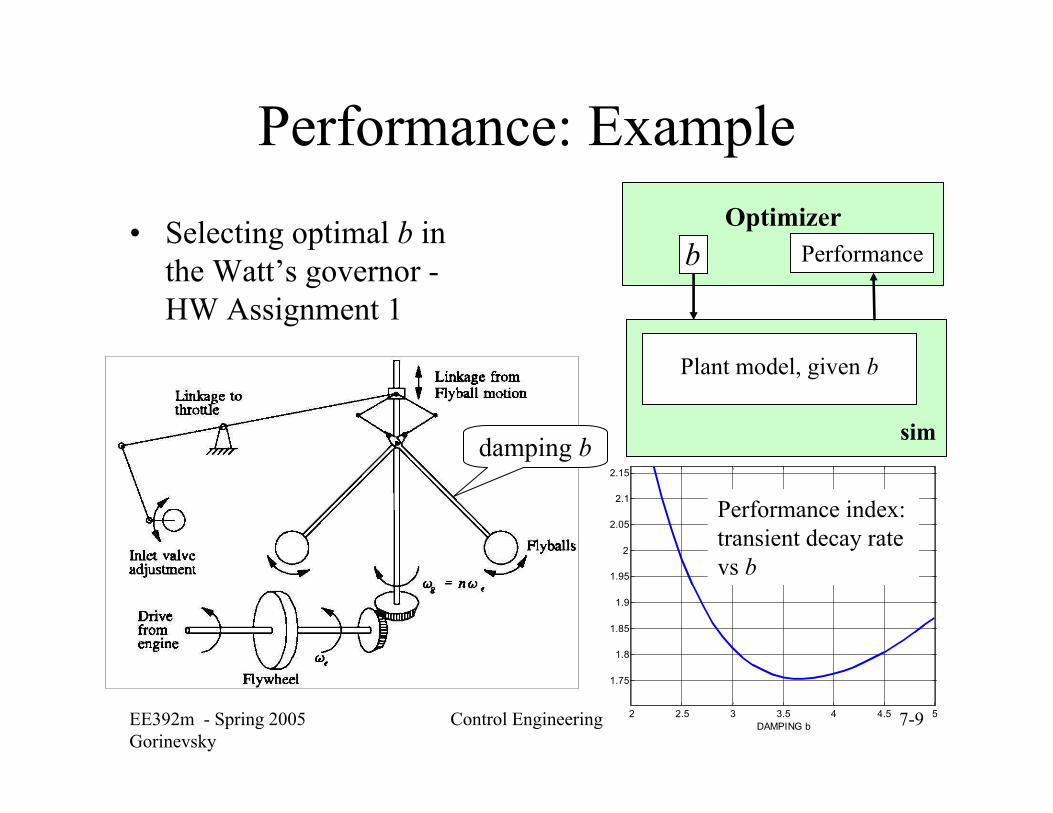
Performance: Example
• Selecting optimal b in the Watt’s governor -HW Assignment 1
sim
Plant model, given b
Optimizerb Performance
2 2.5 3 3.5 4 4.5 5
1.75
1.8
1.85
1.9
1.95
2
2.05
2.1
2.15
DAMPING b
Performance index:transient decay rate vs b
damping b
EE392m - Spring 2005Gorinevsky
Control Engineering 7-10
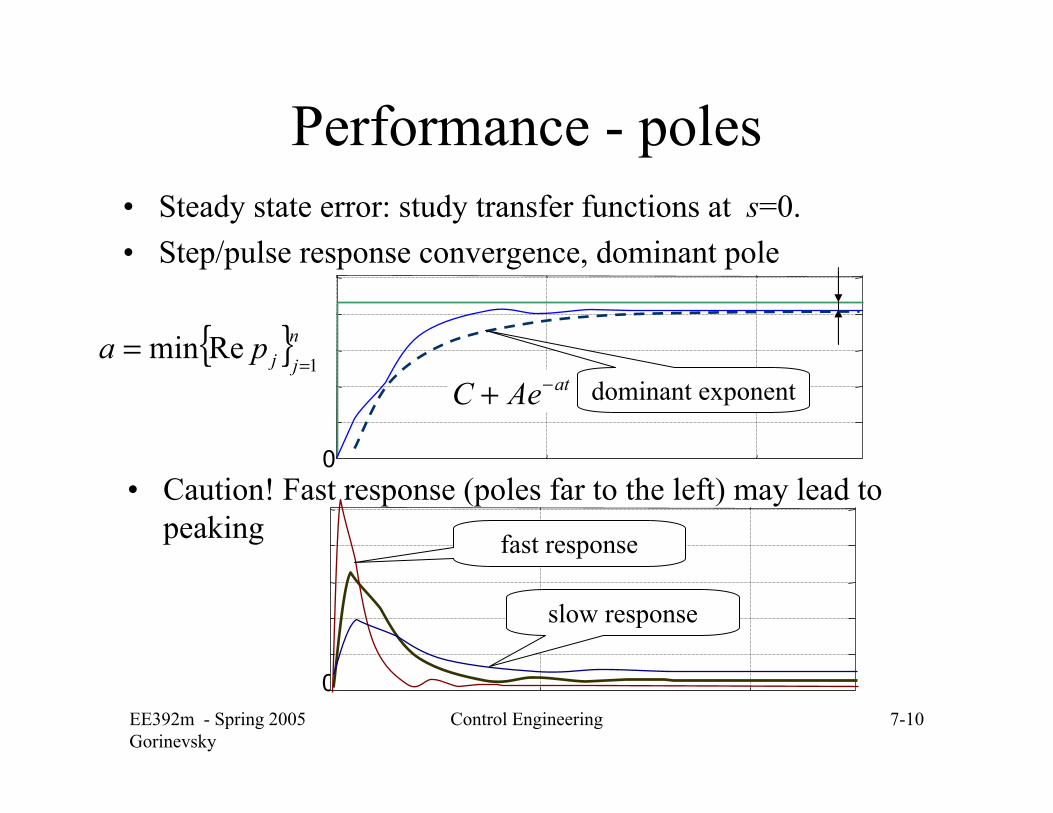
Performance - poles• Steady state error: study transfer functions at s=0.• Step/pulse response convergence, dominant pole
• Caution! Fast response (poles far to the left) may lead to peaking
0
slow response
fast response
{ }njjpa
1Remin
==
0
atAeC −+ dominant exponent
EE392m - Spring 2005Gorinevsky
Control Engineering 7-11
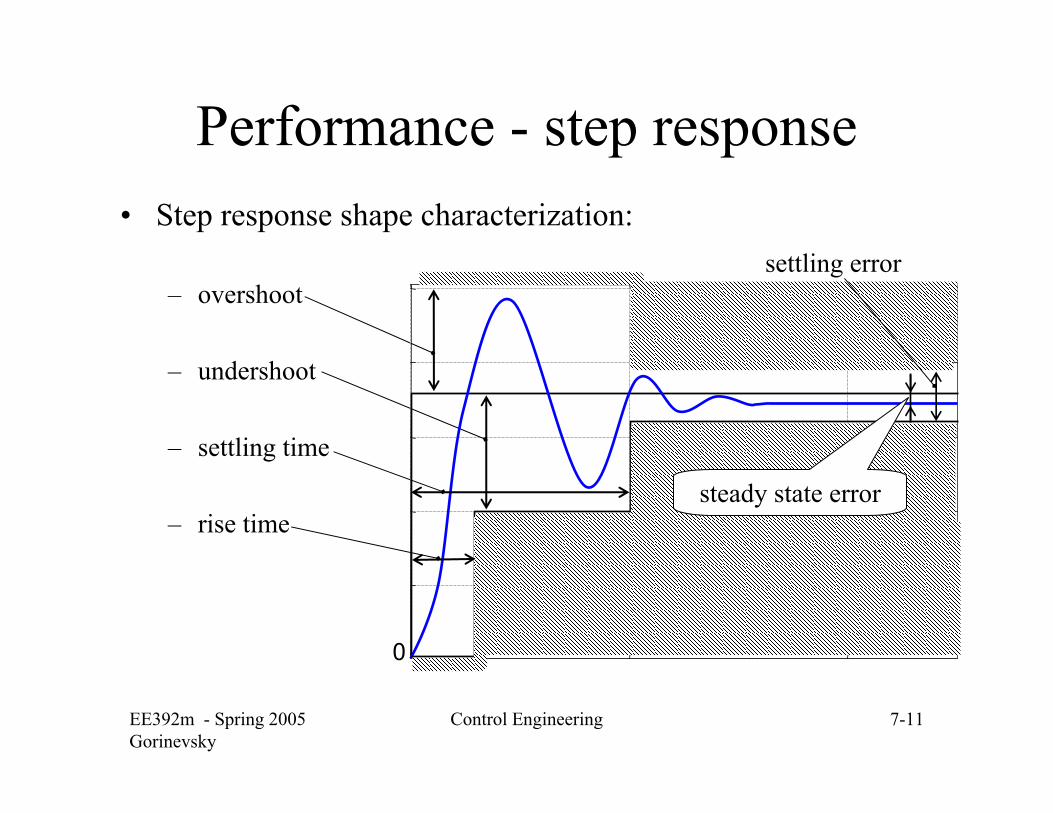
Performance - step response• Step response shape characterization:
– overshoot
– undershoot
– settling time
– rise time
0
steady state error
settling error
EE392m - Spring 2005Gorinevsky
Control Engineering 7-12
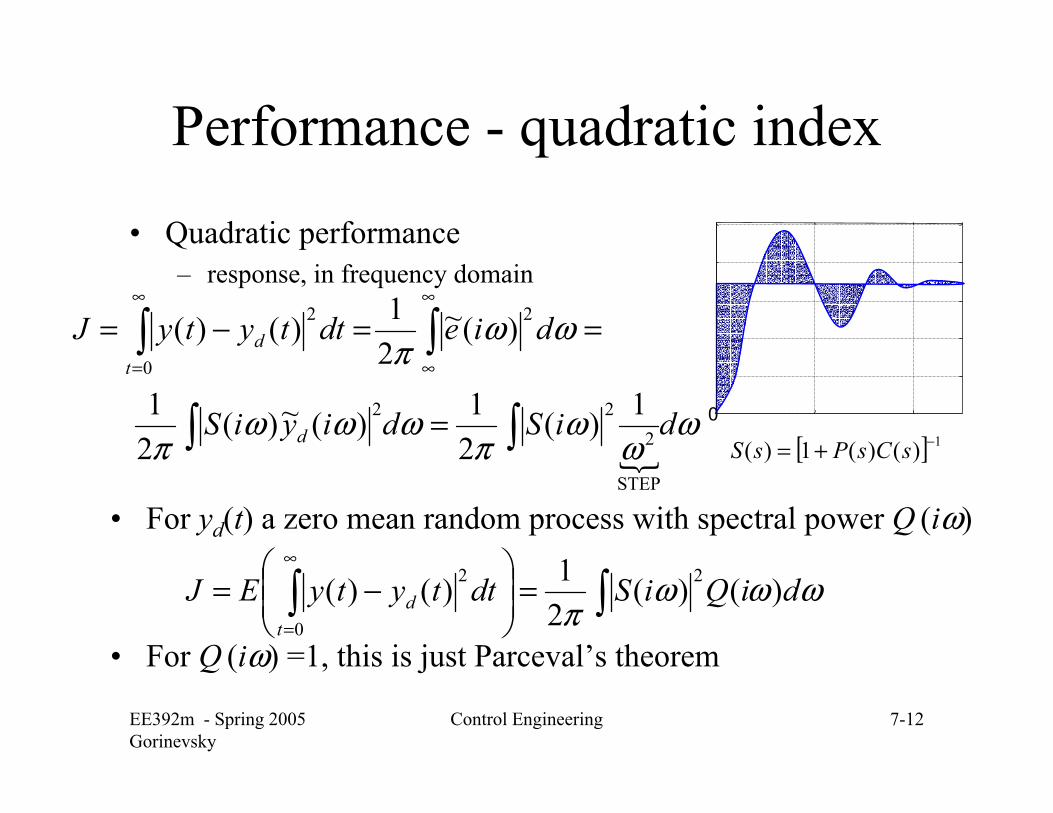
Performance - quadratic index
• Quadratic performance – response, in frequency domain
0
{ω
ωω
πωωω
π
ωωπ
diSdiyiS
diedttytyJ
d
td
∫∫
∫∫
=
==−=∞
∞
∞
=
STEP
222
2
0
2
1)(21)(~)(
21
)(~21)()(
• For yd(t) a zero mean random process with spectral power Q (iω)
• For Q (iω) =1, this is just Parceval’s theorem
ωωωπ
diQiSdttytyEJt
d )()(21)()( 2
0
2
∫∫ =⎟⎟⎠
⎞⎜⎜⎝
⎛−=
∞
=
[ ] 1)()(1)( −+= sCsPsS
EE392m - Spring 2005Gorinevsky
Control Engineering 7-13
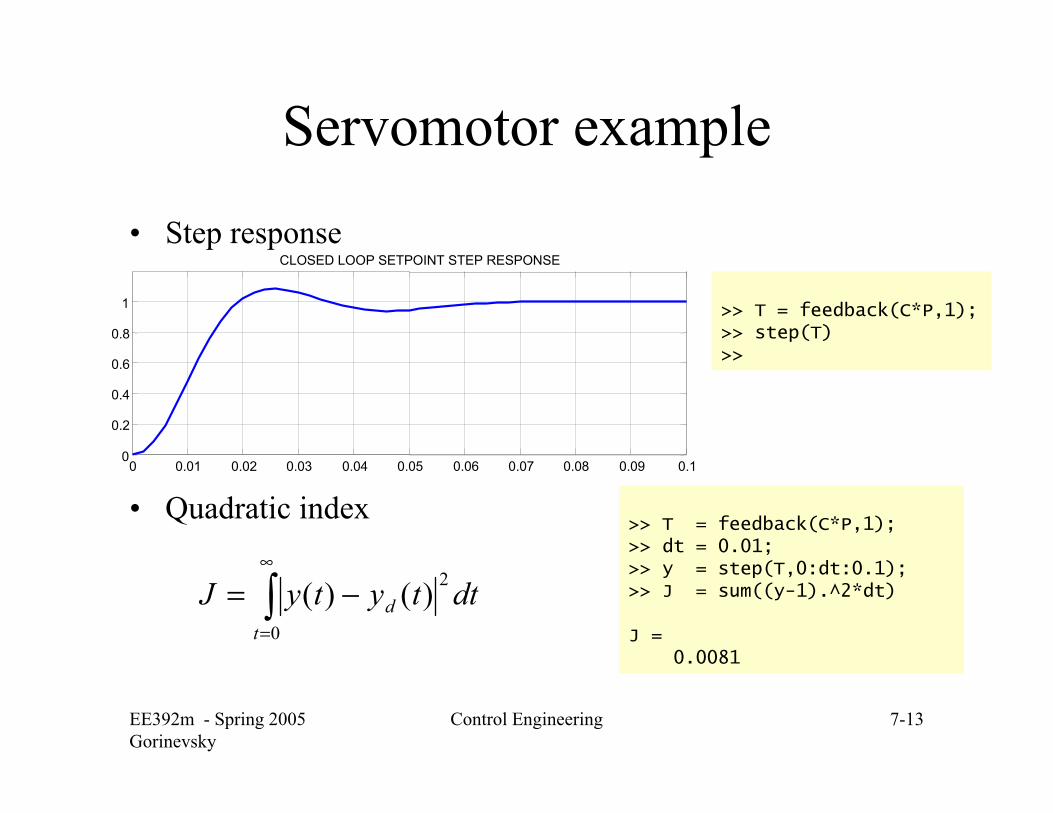
Servomotor example
• Step response
• Quadratic index
>> T = feedback(C*P,1); >> step(T)>>
>> T = feedback(C*P,1); >> dt = 0.01;>> y = step(T,0:dt:0.1); >> J = sum((y-1).^2*dt)
J =0.0081
∫∞
=
−=0
2)()(t
d dttytyJ
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.2
0.4
0.6
0.8
1
CLOSED LOOP SETPOINT STEP RESPONSE
EE392m - Spring 2005Gorinevsky
Control Engineering 7-14
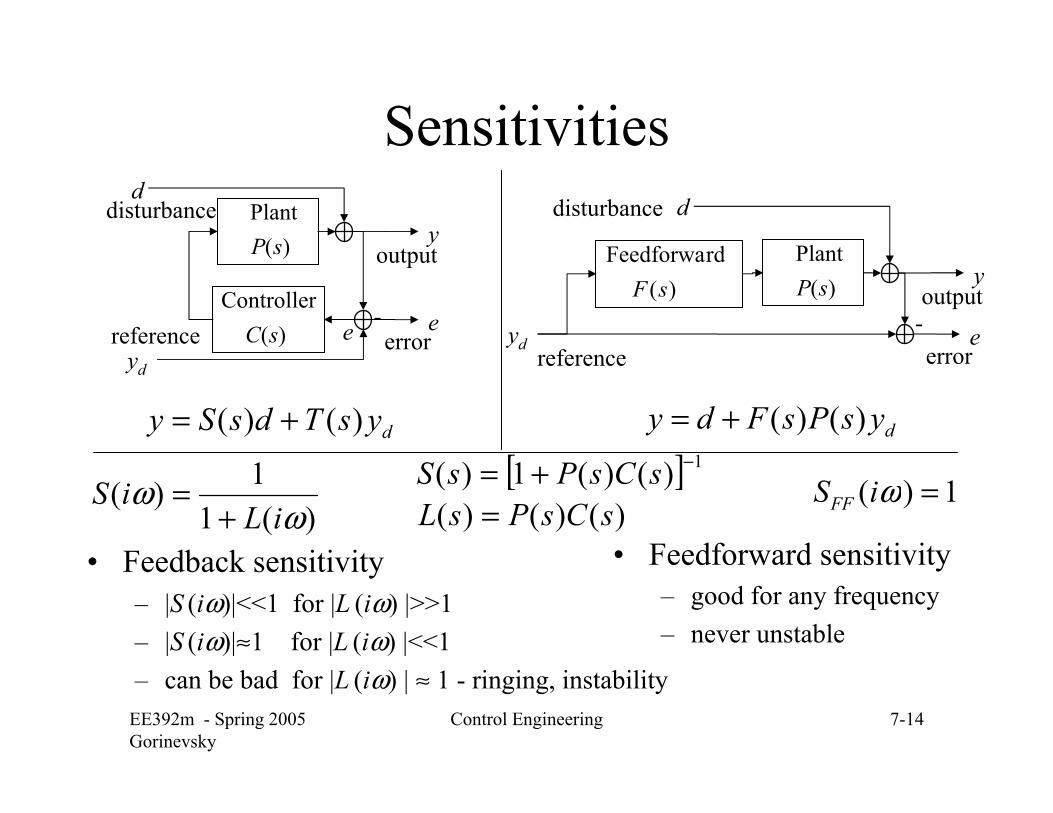
Sensitivities
• Feedback sensitivity – |S (iω)|<<1 for |L (iω) |>>1– |S (iω)|≈1 for |L (iω) |<<1– can be bad for |L (iω) | ≈ 1 - ringing, instability
dysTdsSy )()( +=
)(11)(
ωω
iLiS
+=
)( rd Feedforwa
sF )( Plant
sP- e
y
yd
ddisturbance
reference
output
error)(
Controller sC
)( Plant
sP
-e e
y
yd
ddisturbance
reference
output
error
dysPsFdy )()(+=
• Feedforward sensitivity– good for any frequency– never unstable
1)( =ωiSFF[ ] 1)()(1)( −+= sCsPsS
)()()( sCsPsL =
EE392m - Spring 2005Gorinevsky
Control Engineering 7-15
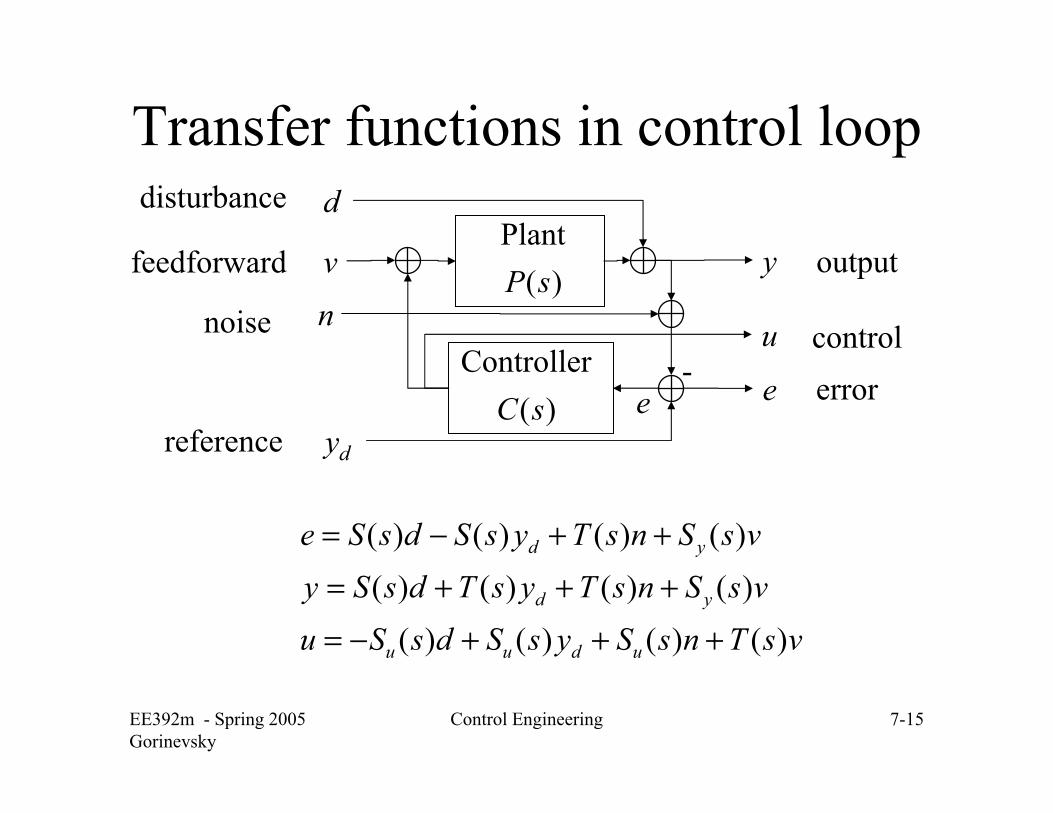
Transfer functions in control loop
vsTnsSysSdsSuvsSnsTysTdsSyvsSnsTysSdsSe
uduu
yd
yd
)()()()()()()()()()()()(
+++−=
+++=
++−=
)( Controller
sC
)( Plant
sP
-e e
y
yd
v
u
ddisturbance
feedforward
reference
output
controlerror
nnoise
EE392m - Spring 2005Gorinevsky
Control Engineering 7-16
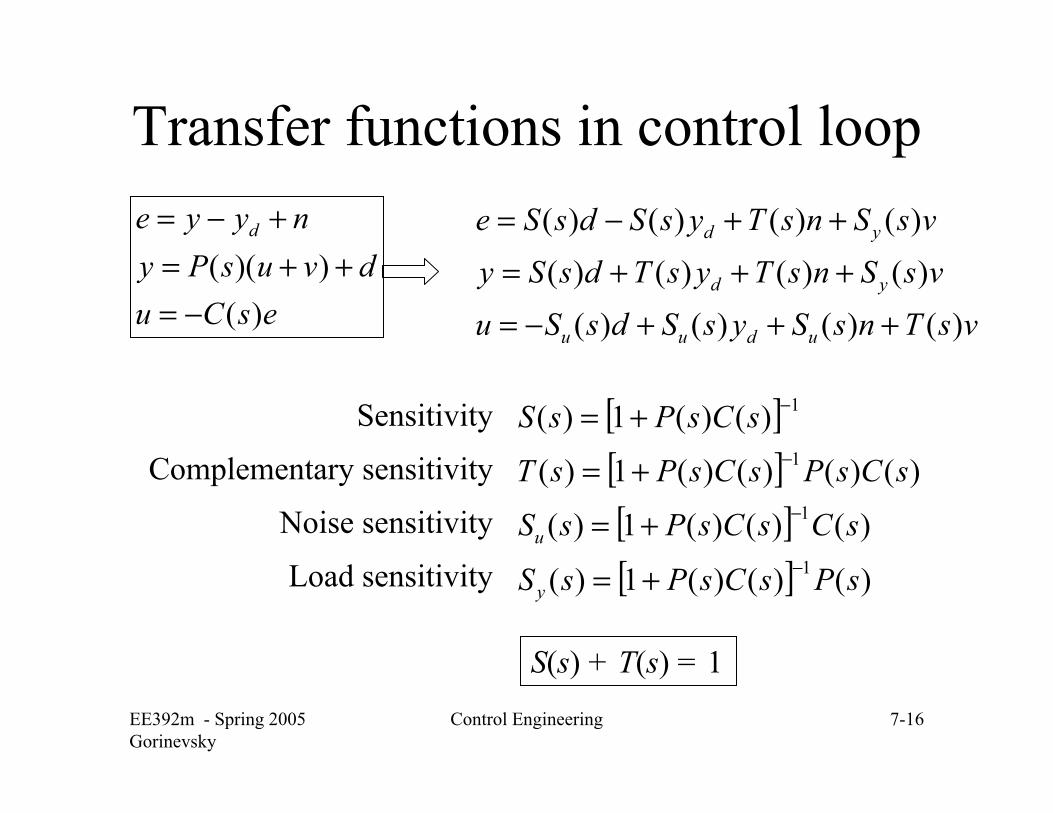
Transfer functions in control loop
Sensitivity
Complementary sensitivity
Noise sensitivity
Load sensitivity
[ ][ ][ ][ ] )()()(1)(
)()()(1)(
)()()()(1)(
)()(1)(
1
1
1
1
sPsCsPsS
sCsCsPsS
sCsPsCsPsT
sCsPsS
y
u−
−
−
−
+=
+=
+=
+=
esCudvusPy
nyye d
)())((
−=++=
+−=
vsTnsSysSdsSuvsSnsTysTdsSyvsSnsTysSdsSe
uduu
yd
yd
)()()()()()()()()()()()(
+++−=
+++=
++−=
S(s) + T(s) = 1
EE392m - Spring 2005Gorinevsky
Control Engineering 7-17
Sensitivity requirements
• Disturbance rejection and reference tracking– |S (iω)|<<1 for the disturbance d– |Sy(iω)|<<1 for the input ‘noise’ v
• Limited control effort– |Su(iω)|<<1 conflicts with disturbance rejection where |P(iω)|<1
• Noise rejection – |T (iω)|<<1 for the noise n, conflicts with disturbance rejection
)()(1)()(
)()(1)()(
)()(11)(
ωωωω
ωωωω
ωωω
iCiPiCiS
iCiPiPiS
iCiPiS
u
y
+=
+=
+=
vsTnsSysSdsSuvsSnsTysTdsSyvsSnsTysSdsSe
uduu
yd
yd
)()()()()()()()()()()()(
+++−=
+++=
++−=
EE392m - Spring 2005Gorinevsky
Control Engineering 7-18
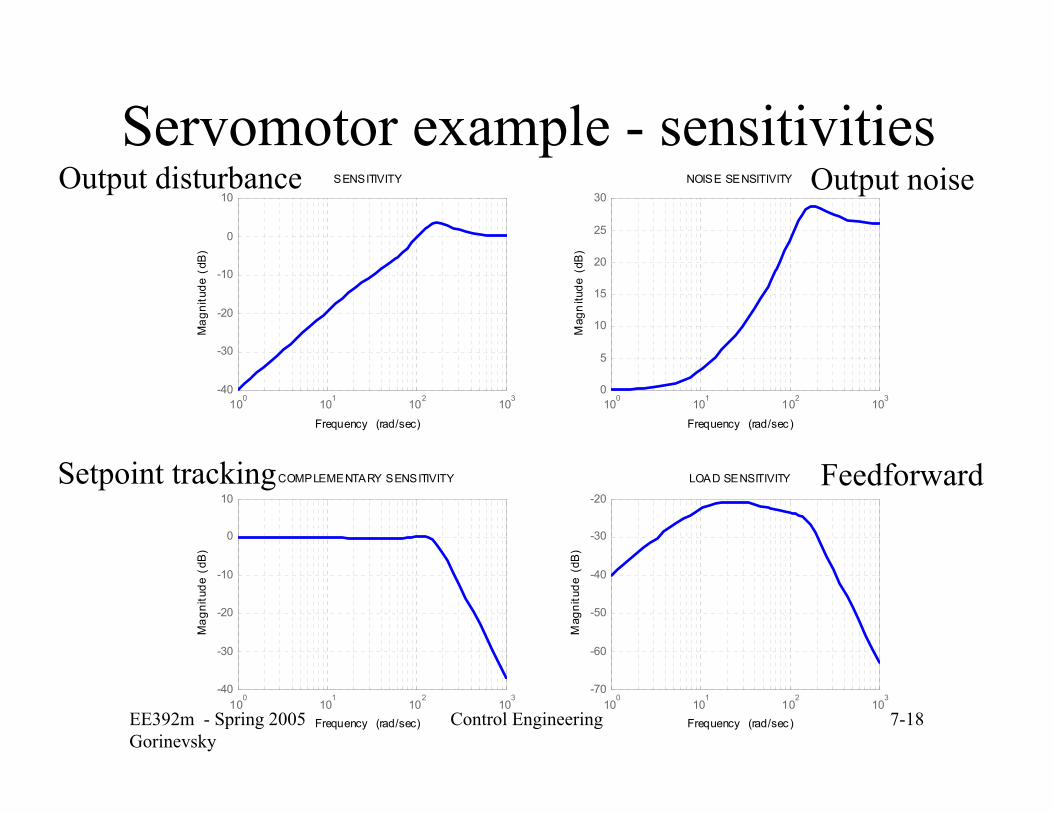
Servomotor example - sensitivities
Setpoint tracking
Output disturbance Output noise
Feedforward
100 101 102 103-40
-30
-20
-10
0
10M
agni
tude
(dB
)
SENSITIVITY
Frequency (rad/sec)
100
101
102
103
-40
-30
-20
-10
0
10
Mag
nitu
de (
dB)
COMPLEMENTARY SENSITIVITY
Frequency (rad/sec)
100 101 102 1030
5
10
15
20
25
30
Mag
nitu
de (
dB)
NOISE SENSITIVITY
Frequency (rad/sec)
100
101
102
103
-70
-60
-50
-40
-30
-20
Mag
nitu
de (
dB)
LOAD SENSITIVITY
Frequency (rad/sec)
EE392m - Spring 2005Gorinevsky
Control Engineering 7-19
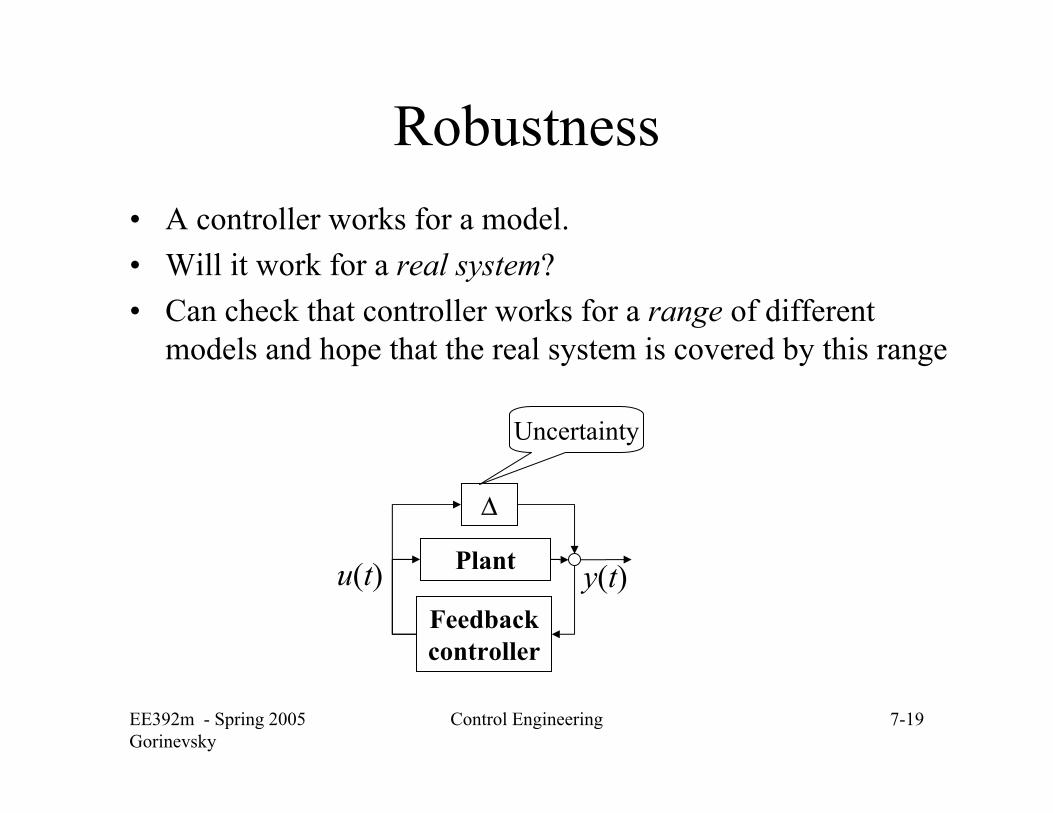
Robustness• A controller works for a model. • Will it work for a real system?• Can check that controller works for a range of different
models and hope that the real system is covered by this range
Plant
Feedback controller
y(t)u(t)
∆
Uncertainty
EE392m - Spring 2005Gorinevsky
Control Engineering 7-20
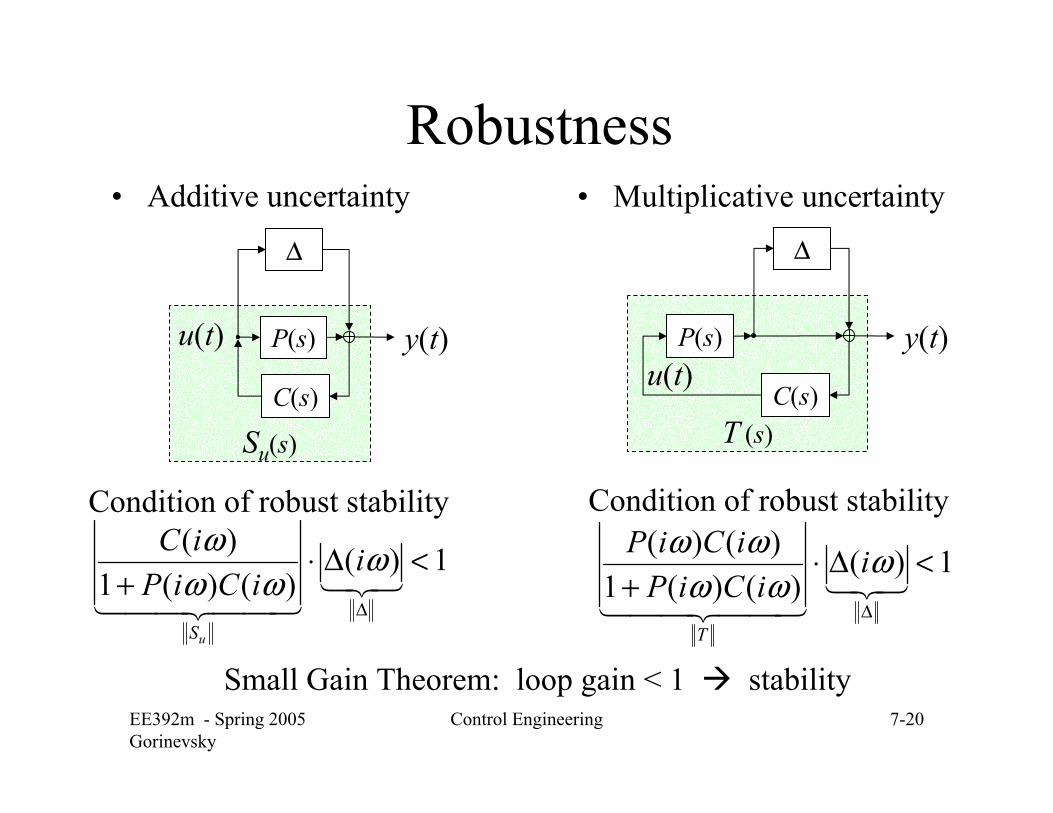
Robustness• Additive uncertainty
T (s)
P(s)
C(s)
y(t)u(t)
∆
1)()()(1
)()( <∆⋅+
∆321
44 344 21
ωωω
ωω iiCiP
iCiP
T
Condition of robust stability
Su(s)
P(s)
C(s)
y(t)u(t)
∆
1)()()(1
)( <∆⋅+
∆321
44 344 21
ωωω
ω iiCiP
iC
uS
Condition of robust stability
• Multiplicative uncertainty
Small Gain Theorem: loop gain < 1 stability
EE392m - Spring 2005Gorinevsky
Control Engineering 7-21
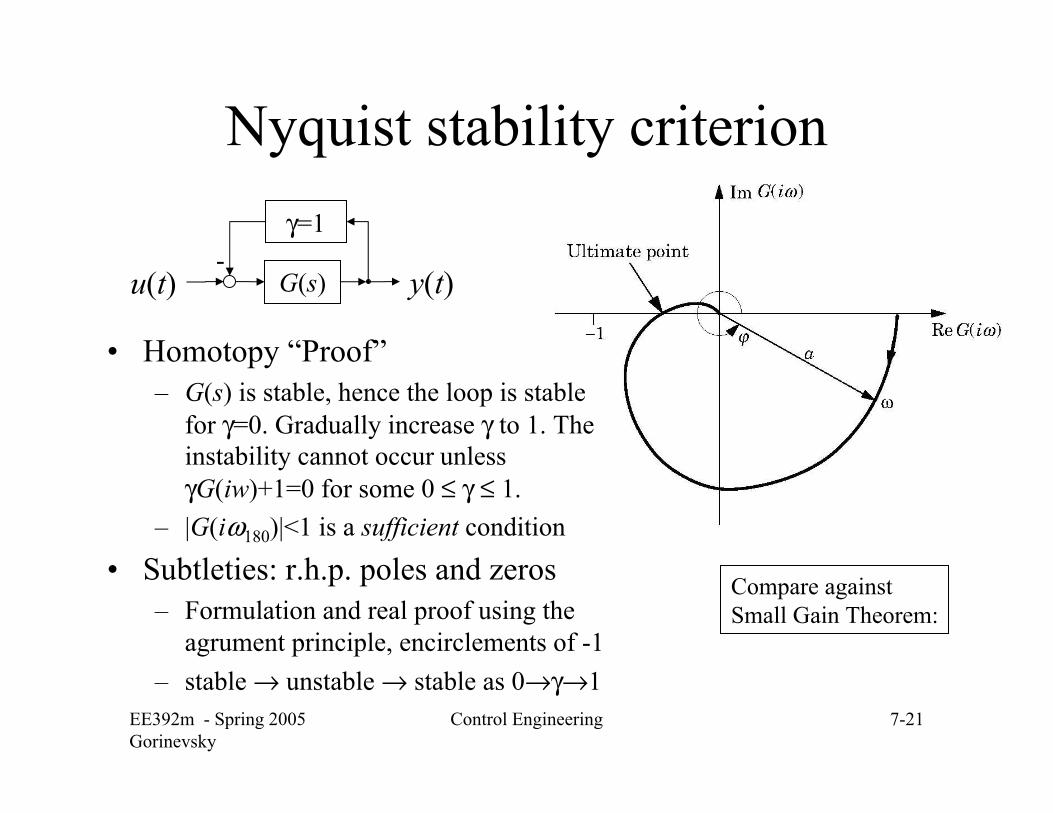
Nyquist stability criterion
• Homotopy “Proof” – G(s) is stable, hence the loop is stable
for γ=0. Gradually increase γ to 1. The instability cannot occur unless γG(iw)+1=0 for some 0 ≤ γ ≤ 1.
– |G(iω180)|<1 is a sufficient condition
• Subtleties: r.h.p. poles and zeros– Formulation and real proof using the
agrument principle, encirclements of -1– stable → unstable → stable as 0→γ→1
u(t) G(s) y(t)
γ=1
Compare against Small Gain Theorem:
-
EE392m - Spring 2005Gorinevsky
Control Engineering 7-22
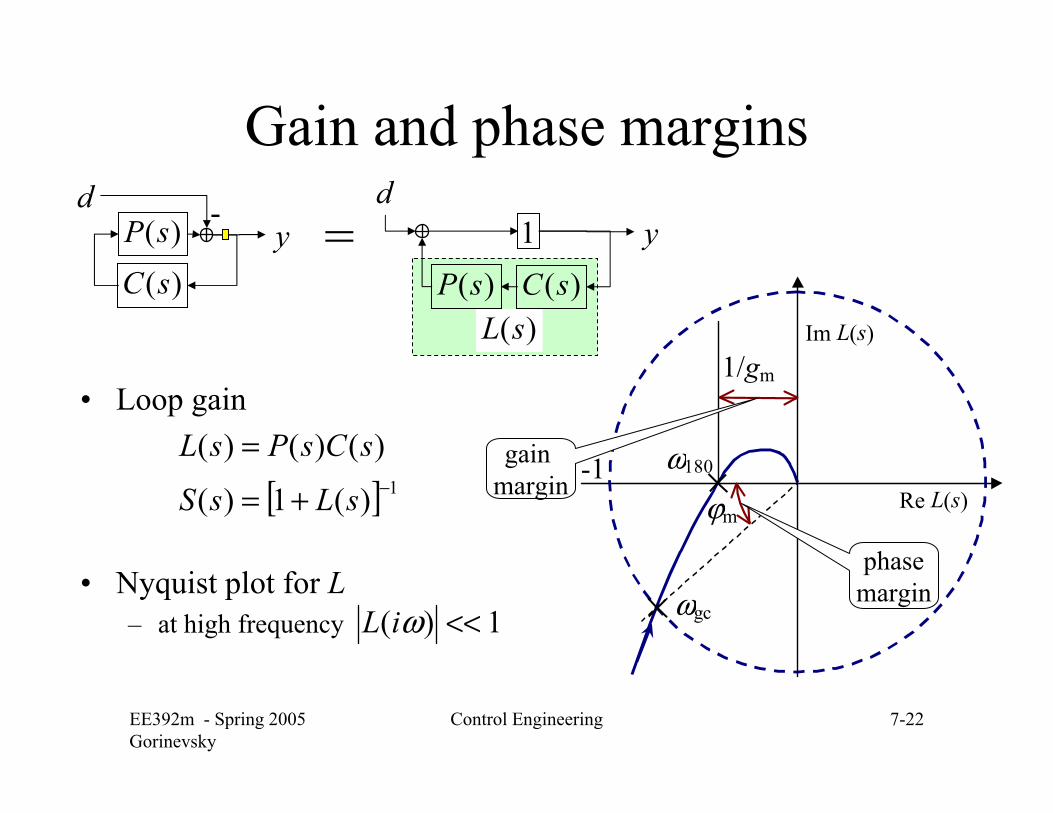
Gain and phase margins
• Loop gain
• Nyquist plot for L– at high frequency
Im L(s)
Re L(s)
1/gm
ω180
ωgc
ϕm
-1
=
[ ] 1)(1)(
)()()(−+=
=
sLsS
sCsPsL gain margin
phasemargin
1)( <<ωiL
)(sC)(sP -
yd
)(sP )(sCy
d1
)(sL
EE392m - Spring 2005Gorinevsky
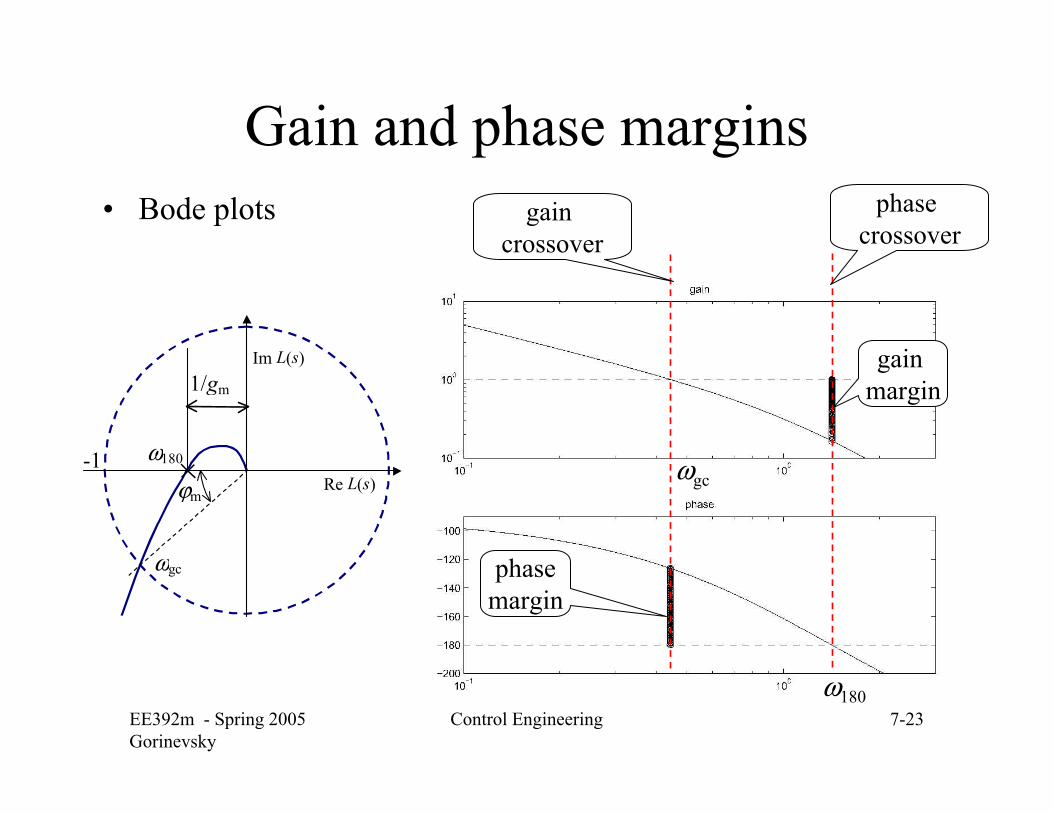
Control Engineering 7-23
Gain and phase margins• Bode plots
Im L(s)
Re L(s)
1/gm
ω180
ωgc
ϕm
-1
ω180
ωgc
gain crossover
phase crossover
gain margin
phasemargin
EE392m - Spring 2005Gorinevsky
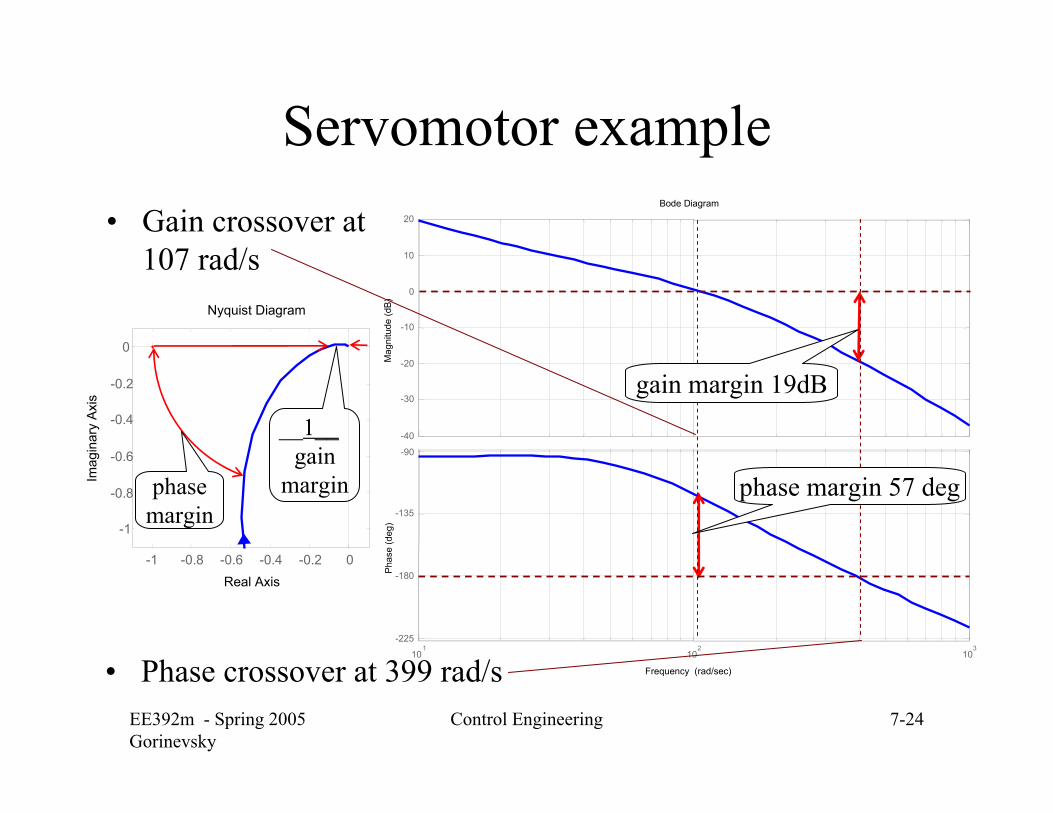
Control Engineering 7-24
Servomotor example• Gain crossover at
107 rad/s
-40
-30
-20
-10
0
10
20
Mag
nitu
de (d
B)
101
102
103
-225
-180
-135
-90
Bode Diagram
Frequency (rad/sec)
Pha
se (d
eg)
gain margin 19dB
phase margin 57 deg
Nyquist Diagram
Real Axis
Imag
inar
y Ax
is
-1 -0.8 -0.6 -0.4 -0.2 0
-1
-0.8
-0.6
-0.4
-0.2
0
phasemargin
__1__ gain
margin
• Phase crossover at 399 rad/s



![Performance and Comparative Analysis of SISO, SIMO, … · Performance and Comparative Analysis of SISO ... is at a phase difference of 180 degree [1]. ... SISO system is that it](https://static.documents.pub/doc/80x56/5af4a7187f8b9a92718dd60f/performance-and-comparative-analysis-of-siso-simo-and-comparative-analysis.jpg)

![A: SISO Feedback Control A.1 Internal Stability and Youla ...Controllability analysis with SISO feedback control [SP05, pp. 206-209] Typically, the closed-loop bandwidth of the spacecraft](https://static.documents.pub/doc/80x56/603b3cf78ba5e8504d150e58/a-siso-feedback-control-a1-internal-stability-and-youla-controllability-analysis.jpg)











