Page 1
Lidar Investigation of Atmosphere Effect on a Wind Turbine Wake
I. N. SMALIKHO AND V. A. BANAKH
V. E. Zuev Institute of Atmospheric Optics, Siberian Branch, Russian Academy of Sciences, Tomsk, Russia
Y. L. PICHUGINA, W. A. BREWER, AND R. M. BANTA
NOAA/Earth System Research Laboratory, Boulder, Colorado
J. K. LUNDQUIST AND N. D. KELLEY
National Renewable Energy Laboratory, Golden, Colorado
(Manuscript received 17 May 2012, in final form 9 February 2013)
ABSTRACT
An experimental study of the spatial wind structure in the vicinity of a wind turbine by a NOAA coherent
Doppler lidar has been conducted. It was found that a working wind turbine generates a wake with the
maximum velocity deficit varying from 27% to 74% and with the longitudinal dimension varying from 120 up
to 1180m, depending on the wind strength and atmospheric turbulence. It is shown that, at high wind speeds,
the twofold increase of the turbulent energy dissipation rate (from 0.0066 to 0.013m2 s23) leads, on average, to
halving of the longitudinal dimension of the wind turbine wake (from 680 to 340m).
1. Introduction
As awind turbine operates, a fraction of the wind-flow
energy is transferred to rotate the turbine blades; there-
fore, a wind-velocity deficit is generated downwind of the
turbine. Studies on the influence of atmospheric conditions
(in particular, wind velocity andwind turbulence intensity)
on the length of a wind wake and the velocity deficit inside
the wake are needed because of the increasing number of
wind farms and the need to optimize the turbine ar-
rangement in a wind farm.
Flow characteristics behind wind turbines have been
studied extensively during the last three decades. The
most comprehensive review of the theoretical and ex-
perimental studies is provided by Vermeer et al. (2003),
wherein investigations of the wind turbine wake were
conducted through the use of various techniques.
H€ogstr€om et al. (1987) employed four different tech-
niques for probing the turbine wake: 1) tower-mounted
instrumentation, 2) Tala Inc. kite anemometers, 3) teth-
ered balloon soundings, and 4) Doppler sodar. Using
these instruments, the velocity deficit and the turbulence
characteristics in the wind turbine wake were investi-
gated. Using data measured by wind and temperature
sensors at two meteorological masts, Magnusson and
Smedman (1996) derived analytical expressions for the
velocity deficit and the added turbulence of the flow
generated by the wind turbines. Measurement results
of the velocity deficit with a ship-mounted sodar were
compared with this empirical model in Barthelmie et al.
(2003) and with other models in Barthelmie et al. (2006).
A coherent Doppler lidar system (CDL) is a powerful
tool that can measure wind, turbulence, and aircraft
wake vortices (K€opp et al. 1984; Hall et al. 1984; Hawley
et al. 1993; Frehlich et al. 1994, 1998; Banakh et al. 1999;
K€opp et al. 2005; Smalikho et al. 2005; Banta et al. 2006;
Frehlich et al. 2006; Pichugina et al. 2008; Rahm and
Smalikho 2008; Banakh et al. 2009; Pichugina and Banta
2010; O’Connor et al. 2010). Results of a study of the
wake generated by a wind turbine with the aid of a
continuous-wave CDL are presented in papers by Bing€ol
et al. (2010) and Trujillo et al. (2011). During the exper-
iment, the lidar was located at the rear of the nacelle, and
the laser beam scans were used to measure wind turbine
wake dynamics and investigate the influence of different
turbulence scales on the wake behavior. For a continuous-
wave CDL, the longitudinal size of the sensing volume
Corresponding author address: Igor N. Smalikho, V. E. Zuev
Institute of Atmospheric Optics, SB RAS, 1 Academician Zuev
Square, Tomsk 634021, Russia.
E-mail: [email protected]
2554 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 30
DOI: 10.1175/JTECH-D-12-00108.1
� 2013 American Meteorological SocietyUnauthenticated | Downloaded 12/07/21 04:56 AM UTC
Page 2
increases quickly with the increase of the focal length or
range (Sonnenschein and Horrigan 1971). In the case of
a pulsed CDL, the longitudinal size of the sensing vol-
ume does not depend on the range, and the radial ve-
locities are measured at different ranges along the axis
of the sensing beam as the pulse propagates outward and
interacts with backscattering targets, generally atmo-
spheric aerosol particles. Therefore, pulsed CDL opens
up a wide range of possibilities to investigate the wind
turbine wake, by using the geometry of scanning by the
sensing beam during the measurement time, as was dem-
onstrated by K€asler et al. (2010).
This paper describes the lidar data processing pro-
cedures that were performed to obtain information about
the wind, turbulence, and wind turbine wake, and pres-
ents some results of a field experiment [described in detail
in Lundquist et al. (2013), manuscript submitted to En-
viron. Res. Lett.] that was conducted with the use of a
2-mm pulsed CDL under various atmospheric conditions.
2. Estimation of the dissipation rate of turbulentenergy from scanning CDL data
The use of conical scanning by a sensing beam of the
coherent Doppler lidar around the vertical axis at a fixed
elevation angle u allows researchers to obtain infor-
mation about wind direction and velocity. If measure-
ments are conducted by a pulsed CDL, then the vertical
profiles of these parameters can be retrieved from the
data obtained for one full scan (azimuth angle u varies
from 08 to 3608) using the velocity–azimuth display
(VAD) technique (Browning and Wexler 1968; Banta
et al. 2002). For the continuous-wave CDL, Banakh
et al. (1999) showed that the wind speed and direction
and the turbulence energy dissipation rate within the
atmospheric boundary layer can be estimated from data
measured by conical scanning. In addition, Frehlich
et al. (2006) showed that information about wind tur-
bulence can be retrieved from pulsed CDL data that are
obtained by conical-sector scanning; that is, scanning
in azimuth over a limited sector. We present a brief de-
scription of the approaches used to estimate the turbu-
lence energy dissipation rate « from the transverse and
longitudinal structure functions of the radial velocity, as
measured by a 2-mm pulsed CDL using conical scanning
techniques (including one full scan and multiple sector
scanning).
The Doppler lidar used in this study was the National
Oceanic and Atmospheric Administration’s (NOAA’s)
high-resolution Doppler lidar (HRDL), as described by
Grund et al. (2001). Themain characteristics of this lidar
are given in Table 1. In this table, we also included re-
sults of numerical simulation at weak (sV 5 0.2m s21,
LV 5 100m) and strong (sV 5 1.2m s21, LV 5 100m)
wind turbulence and at different signal-to-noise ratios
(SNRs, the ratio of the mean signal power to the mean
noise power in the spectral bandwidth of 50MHz) for the
error of lidar estimate of the radial velocity (Smalikho
et al. 2013).
Consider the case of a 2-mm pulsed CDL, where the
temporal power profile of the sensing radiation is well
described by aGaussian distribution with pulse duration
2sP, determined from the power drop to the e21 level
from the peak. The pulse repetition frequency is de-
noted FP. During measurements by this lidar, conical
scanning with a constant angular rate v0 is used. For
different distances zi from the lidar and azimuth angles
um, raw data measured by the lidar are used to calculate
the Doppler spectra with the use of the rectangular time
window of width Tw for each spectrum and the accu-
mulation of individual estimates of spectra fromNa lidar
shots, where zi 5 z0 1 iDR, i5 0, 1, 2, . . . , I2 1, z0 � Dp,
TABLE 1. Parameters of HRDL and accuracy of radial velocity estimate.
Wavelength 2.0218mm (Tm: Lu, YAG)
Pulse energy 1.5mJ
Pulse duration (full width at half maximum) 200 ns
Pulse repetition rate 200Hz
Local–slave oscillator frequency offset 100MHz
Telescope diameter 20 cm
Data acquisition Base band (each IQ signal is 0–25MHz);
sampling rate (length) is 50MHz (3m)
Minimum range 189m
Radial velocity sampling (along line of site) 30m
Error of radial velocity estimate at Na 5 100
with probability of bad estimate
(uniformly distributed from 225 to
125m s21) less than 1024
SNR (dB) se [weak turbulence (m s21)] se [strong turbulence (m s21)]
10 0.07 0.15
0 0.1 0.17
210 (at range ;1.5–2 km) 0.38 0.42
NOVEMBER 2013 SMAL IKHO ET AL . 2555
Unauthenticated | Downloaded 12/07/21 04:56 AM UTC
Page 3
Dp5 csP/2, c is the speed of light, DR5 cTW /2, um 5u0 1mDu, m5 0, 1, 2, . . . ,M2 1, and Du5v0Na/FP.
Then, the centroid of the spectral distribution is used
to estimate the radial velocity (projection of the wind-
velocity vector to the axis of the sensing beam) Vr(zi, um)
with an allowance made for the Doppler relation. If the
estimate is unbiased (where the probability of a bad
estimate caused by the system noise with an allowance
for theDoppler relation is equal to zero), then Vr(zi, um)
can be represented in the following form by averaging
over the azimuth angle (Banakh and Smalikho 1997;
Frehlich and Cornman 2002):
Vr(zi, um)5Vr(zi, um)1Ve(zi, um) , (1)
where
Vr(zi, um)
5N21a �
Na
k51
ð1‘
2‘dz0Qs(z
0)Vr(zi 1 z0, um21 1kv0/FP)
(2)
is the radial velocity averaged over the sensing volume,
Qs(z0)5
1
2DR
�erf
�z0 1DR/2
Dp
�2 erf
�z02DR/2
Dp
��(3)
is the weight function of averaging along the axis
of propagation of the sensing beam, erf(x)5(2/
ffiffiffiffip
p)Ð x0 dj exp(2j2) is the standard error function,
Vr(z0, u) is the radial velocity at the point z0S(u) of
the Cartesian coordinate system fz, x, yg, S(u)5 fsinu,cosu cosu, cosu sinug, and Ve(zi, um) is the random error
of the estimation. This error has the following properties:
hVei50,hVrVei5hVrihVei50,andhVe(zi, um)Ve(zi, ul)i5s2edm2l, where the angular brackets denote averaging
over the ensemble of realizations, s2e 5 hV2
e i is the
variance of the random error of estimation of the
radial velocity, and dm2l is the Kronecker delta
(d0 5 1, dm6¼l 5 0). The integral correlation scale Le 5s22e
Ð ‘0 dz0hVe(zi 1 z0, um)Ve(zi, um)i is determined by
the longitudinal dimension of the sensing volume
Dz5 DR/erf[DR/(2Dp)] (Banakh and Smalikho 1997).
Assuming that the pulse repetition frequency Fp is
high and the conditions Na � 1 and zi � LV are true,
whereLV is the integral scale of correlation of turbulent
fluctuations of the wind velocity (Smalikho et al. 2005),
we transformed the velocity Vr from the polar co-
ordinate system fz0, ug to the rectangular coordinate
system on the plane fz0, y0g (z0 is the longitudinal co-
ordinate axis and y0 is the transverse axis) and, re-
placing the summation with integration in Eq. (2), we
obtained the equation
Vr(zi, ym)
5Dy21
ðDy/22Dy/2
dy0ð1‘
2‘dz0Qs(z
0)Vr(zi 1 z0, ym 1 y0) ,
(4)
where ym 5 y0 1mDy and Dy5 ziDu cosu. This approx-imation is rigorous under the conditions mDy/(zi cosu) � p/2 and z0 � iDR.
a. Transverse structure function
For the case of statistically homogeneous and iso-
tropic turbulent flow, we obtained from Eqs. (1)–(4) an
equation for the transverse structure function of the
radial wind velocity measured by Doppler lidar for
azimuthal scanning, DV(mDy)5 h[Vr0(zi, y0 1mDy)2
Vr0(zi, y0)]
2i (Vr0 5 Vr 2 hVri) in the form
DV(mDy)5DV(mDy)1 2(12 dm)s2e , (5)
where
DV(mDy)5 8
ð‘0dkz
ð‘0dky SV(kz, ky)Hz(kz)Hy(ky)[12 cos(2pmDyky)] (6)
is the transverse structure function of the radial velocity
averaged over the sensing volume, SV(kz,ky) is the two-
dimensional spatial spectrum of turbulent fluctuations
of the wind velocity,
Hz(kz)5 fexp[2(pDpkz)2] sinc(pDRkz)g2 (7)
is the function of the low-pass filter along the axis z0, and
Hy(ky)5 sinc2(pDyky) (8)
is the function of the low-pass filter along the axis y0,sinc(x)5 sin(x)/x. For the von K�arm�an model (Monin
and Yaglom 1975; Vinnichenko et al. 1973)
2556 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 30
Unauthenticated | Downloaded 12/07/21 04:56 AM UTC
Page 4
SV(kz,ky)5 0:008 15CK«2/3
"(8:42LV)
2
11 (8:42LV)2(k2z1 k2y)
#4/3
3
"11
8
3
(8:42LVky)2
11 (8:42LV)(k2z1 k2y)
#,
(9)
whereCK ’ 2 is the Kolmogorov constant. The variance
of wind velocity s2V 5 hV2
r i2 hVri2 is related to « and LV
by the equation:
s2V 5 0:636CK(«LV)
2/3 . (10)
Because the difference DDV(mDy)5DV(mDy)2DV(Dy) does not depend on the errorse [seeEq. (5)], from
the measured transverse structure function of radial ve-
locity DV(mDy), estimates of the turbulence energy dissi-
pation rate « and the integral scale LV can be obtained
using the following algorithm (Smalikho andBanakh2013):
min[r(LV)]5 r(LV) (11)
and
«5 [m(LV)]3/2 , (12)
where
r(LV)5 �M0
m52
2664 DDV(mDy)
G(mDy;LV)2m(LV)
37752
,
m(LV)51
M02 1�N
n52
DDV(mDy)
G(mDy;LV),
DDV(mDy) 5 DV(mDy) 2 DV(Dy), G(mDy;LV) 5[DV(mDy)2DV(Dy)]/«
2/3, and M0Dy. 2LV . The func-
tion G(mDy;LV) was calculated using Eqs. (6)–(9).
Then, using estimates « and LV , the wind-velocity vari-
ance s2V was calculated by Eq. (10).
In contrast to the approach of Frehlich et al. (2006),
we used calculations of DV(mDy) to take into account
the averaging of the radial velocity across the probing
beams (along the axis y0). We used such an approach
because, in our experiments at large ranges Ri, the
transverse distance Dy between successive lidar beams,
which is proportional to Du, can exceed the longitudinal
size Dz of the sensing volume.
b. Longitudinal structure function
As the measurement range zi increases, the transverse
dimension of the sensing volume Dy5 ziDu cosu in-
creases as well. However, the condition z0 � iDR allows
us to use the approximation Dy ’ [z0 1 DR(I 2 1)/2]
Du cosu in Eq. (4). That is,Dy can be considered constantalong the propagation path. Then, for the longitudinal
structure function of the radial velocity measured by the
lidar DV(iDR)5 h[Vr0(z0 1 iDR, ym)2Vr
0(z0, ym)]2i, we
obtain from Eqs. (1)–(4)
DV(iDR)5DV(iDR)1 2s2
e[12Ke(iDR)] , (13)
where
DV(iDR)5 8
ð‘0dkz
ð‘0dky SV(kz, ky)Hz(kz)Hy(ky)[12 cos(2piDRkz)] . (14)
From the measured transverse structure function of
radial velocity DV(iDR), estimates of the turbulence
parameters «, LV , and s2V can be obtainedwith the use of
Eqs. (7)–(10) and (14) and the approaches described
in the works of Frehlich and Cornman (2002) and
Smalikho et al. (2005).
c. Comparison of vertical « profiles: Lidar techniqueversus sonic anemometer
To test the method of estimation of « from lidar
measurements of the transverse structure function
DV(mDy), we used data from the experiment conducted
in September 2003 in southeastern Colorado within the
framework of the Lamar Lower-Level Jet Project
(Banta et al. 2006; Kelley et al. 2007; Pichugina and
Banta 2010). In this experiment, HRDL was operated
along with four sonic anemometers installed on a 120-m
meteorological tower (at heights of 54, 67, 85, and
116m). The distance between the tower and the HRDL
container was 167m. For the comparative analysis of the
results of joint measurements of the dissipation rate « by
HRDL and sonic anemometers, we selected the initial
experimental data obtained on 15 September 2003,
when thewind directionwas such that wind-flowdistortion
effects introduced by the meteorological tower on the
sonic anemometer measurements could be neglected.
During the HRDL measurements, different scanning
geometries were used. In the work of Banakh et al.
NOVEMBER 2013 SMAL IKHO ET AL . 2557
Unauthenticated | Downloaded 12/07/21 04:56 AM UTC
Page 5
(2009), we applied the raw experimental wind data ob-
tained on 15 September 2003 and conducted a compar-
ative analysis of the « estimation from the longitudinal
structure function of the radial velocity measured by
HRDL scanning in the vertical plane and from temporal
spectra of the wind velocity measured by sonic ane-
mometers. In that case, the resolution in the scanning
angle was 0.258 and the transverse dimension of the
sensing volume Dy was much smaller than the longitu-
dinal dimension Dz ; 40m out to the measurement
range zi 5 3 km. Because of this condition, the theo-
retical calculations of the longitudinal structure function
by Banakh et al. (2009) were able to neglect the aver-
aging of turbulent fluctuations of the velocity along the
transverse coordinate, in contrast to Eq. (14). As a result
of the analysis of « estimated from lidar data, compared
with that from sonic anemometer data measured for
a;16-min period (Smalikho 1997), Banakh et al. (2009)
found that the relative error of the lidar estimation of «
did not exceed 25%.
During another time period on the same day, full 3608azimuth ‘‘VAD’’ scans were conducted at periodic in-
tervals to determine wind speed and direction. The re-
sults of the wind estimation by the filtered sine-wave
fitting method (Smalikho 2003) were reported in the
paper of Banakh et al. (2010). We used these data here
to retrieve vertical profiles of « by applying the method
of transverse structure function.
One full scan, covering 3608 in azimuth, was conducted at
an elevation angle u5 98 for one minute. The azimuth
resolution was Du5 1:58. In this case, at the distance zi 51500m, the transverse dimension of the sensing volume Dywas nearly equal to the longitudinal dimension Dz. There-fore,DV(mDy) should be calculated by Eq. (6), to account
for the transverse averaging of the radial velocity. The
transverse structure function for theheighthi 5 hL 1 zi sinu(where hL 5 3m was the height above ground of HRDL’s
scanning telescope) was estimated by averaging over the
entire circle of the scan cone and over five range gates
along the axis of propagation of the sensing beam as
DV(mDy)51
5�5
l51
1
Ms 2m�M
s
m051
8>><>>:
Vr0 (zi 1 (l2 3)DR, y01 (m1m0)Dy)
2Vr0 [zi1 (l2 3)DR, y0 1m0Dy]
9>>=>>;
2
, (15)
where m5 1, 2, . . . , 20, Ms 5 240 (MsDu5 3608),Vr
0 (zi, ym)5 Vr(zi, ym)2 Vi � S(um), and Vi 5 [Vz(hi),
Vx(hi), Vy(hi)] is the estimate of the mean wind-velocity
vector obtained from theVADsine-wavefitting procedure.
Figure 1 shows vertical profiles of « retrieved from data
measured by HRDL (curves) and by the four sonic ane-
mometers (icons). According to estimates obtained from
numerical simulation (Smalikho et al. 2013) for con-
ditions of this experiment, the relative error of the lidar
estimate of «, determined as E« 5ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffih(«/«2 1)2i
q3 100%,
is between 30% and 40%. Taking into account the high
accuracy of the « measurement by sonic anemometers
(Banakh et al. 2009) and using the data shown in Fig. 1,
we obtained an estimate of the relative error of the li-
dar estimate of «, calculated by the equation
E«5
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1
K�K
k51
[«L(k)/«S(k)2 1]2
s3 100%, (16)
where K5 16, «L, and «S are estimates of the turbulent
energy dissipation rates from data measured by HRDL
(at heights corresponding to those of sonic anemome-
ters) and sonic anemometers, respectively. The value
obtained, E« ’ 42%, is larger than the theoretical error
E«. It is quite possible that the uncertainty in the esti-
mate E« was large because K was small. An increase in
the number of full scans would allow one to obtain data
with a greater number of degrees of freedom and, cor-
respondingly, to decrease the error significantly.
Section 5 will present estimates of « both by the above
transverse-structure-function method (each transverse
structure function was calculated from data measured at
one full scan) and by the longitudinal-structure-function
approach using data obtained from conical-sector scans.
These results were necessary to analyze the influence of
turbulence on the wake generated by a wind turbine.
3. Estimation of turbine wake parameters
A deficit of wind velocity takes place inside the wake
generated behind a wind turbine on its leeward side. At
some distance from the turbine, this deficit fully disap-
pears. The most characteristic wake parameters are the
maximum value of the wind-velocity deficit and the ef-
fective transverse and longitudinal dimensions of the
wake. The transverse wake dimension is initially de-
termined by the diameter D of the circle described by
the outer end of the turbine blade. The maximum ve-
locity deficit and the longitudinal dimension of the wake
2558 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 30
Unauthenticated | Downloaded 12/07/21 04:56 AM UTC
Page 6
depend on the turbine type andon atmospheric conditions.
To investigate these parameters with the aid of a pulsed
CDL, different geometries of scanning can be used. In this
case, the lidar should be at a sufficient distance from the
turbine, and the wind direction should be nearly aligned
with the lidar–turbine line. As seen in Fig. 2, the angle of
wind direction uV should, if possible, be close to the azi-
muth angle uT between the direction to the north and the
line running from the lidar position to the turbine position
(angle between the axis OY and the line OT in Fig. 2).
In this paper, we studied the wind field in the vicinity
of the wind turbine using conical-sector scanning. The
elevation angle u should be set so that the sensing beam
intersects with the largest area of the turbine wake, in-
cluding the point of the maximum velocity deficit, if
possible. Figure 2 shows the geometry of the lidar mea-
surement for conical-sector scanning.
One of the aims of this study was to obtain informa-
tion about the velocity deficit at a distance R from a
turbine along the wind direction from HRDL scan data.
We defined the velocity deficit VD as
VD5 (12U/UA)3 100%, (17)
where UA is the mean ambient wind velocity outside of
the wake, and U is the mean wind velocity within the
wake downstream of the turbine.
We assume that the velocity UA is horizontally ho-
mogeneous. Then, we can choose the pointA (see Fig. 2)
on the scanning plane with the coordinates fXA,YAg,
which lies at the same radial distance from the lidar as
the point with the turbine coordinates fXT ,YTg, whereXA 5b sinuA,YA 5 b cosuA,XT 5 b sinuT ,YT 5 b cosuT ,
and b is the distance between the lidar and the turbine.
The angle uA, between the axis OY and the line OA, can
be set as uA 5 uT 6 d/b, where the arc length d � b. In
this case, the point A can be located either to the right
(1) or to the left (2) of the turbine.
As a result of the multiple repetitions of sector scans
during the HRDL measurement and data processing, we
obtainedanarrayof estimated radial velocities Vr(zi, um; n),
where n5 1, 2, . . . ,N is the scan number, for the shaded
area in Fig. 2. Then we averaged these estimates as
hVr(zi, um)i5N21 �N
n51
Vr(zi, um; n) (18)
and transformed from polar fz0, ug to the rectangular
coordinates fX,Yg by interpolating the data to a
computational grid with a fine mesh (hVr(z0, u)i/
hVr(X,Y)i).According to the measurement geometry (see Fig. 2),
the dependence of the mean wind velocity U on the
distance R 2 [0,Rmax] along the wind direction and on
the arc length d can be calculated as
U(R,d)
5hVr(XA1R0sinuV ,YA1R0cosuV)i/cos(uAV2uR) ,
(19)
FIG. 1. Vertical profiles of « retrieved from data measured by HRDL by conical scanning
(curves) and four acoustic anemometers on a meteorological tower (icons) on 15 Sep 2003 in
southeastern Colorado, at 0000 LT (curve 1, circles); 0100 LT (curve 2, open squares); 0200 LT
(curve 3, closed squares); and 0300 LT (curve 4, crosses).
NOVEMBER 2013 SMAL IKHO ET AL . 2559
Unauthenticated | Downloaded 12/07/21 04:56 AM UTC
Page 7
where uAV 5 uA 2 uV , uR 5 arctan[R0 sinuAV/(b 1R0 cosuAV)] is the angle between the lines OP and OA,
R0 5 (R2 1 2Rb cosuTV 1 b2 cos2uAV)1/2 2 b cosuAV , and
uTV5 uT 2 uV . This derivation assumes that the vertical
variation of the wind direction angle uV can be neglected
over the interval [0,Rmax], and that the mean radial ve-
locity, measured at the azimuth angle u and at very small
elevation angle u (cosu’ 1), can be described by the
equation hVri5U cos(u2 uV). The measurement height
h(R)5 hL 1 (R2 1 2Rb cosuTV1 b2)1/2 sinu does not de-
pend on the arc length d.
Based on Eqs. (17)–(19) and in accordance with Fig. 2,
we estimated the velocity deficit VD(R, x0) as
VD(R, x0)5 [12U(R2 x0 tanuTV, x0/cosuTV)/
UA(R2 x0 tanuTV)]3 100%, (20)
where UA(R)5U(R, 1:2D) and the axis x0 is perpen-
dicular to the wake axis R.
The wind direction angle uV in Eqs. (19) and (20) can
be computed from full 3608 HRDL conical scans using
theVADprocedure. On the other hand, using the sector
data, we estimated the wind direction from the position
of the wake generated by the turbine, because the wind
velocity inside the wake was lower than that in the en-
vironment within the scanning sector. Supervisory
Control and Data Acquisition (SCADA) data, which
could also define the turbine yaw angle, were not
available. Below we estimate the wind direction angle
(in degrees) as
uV 51808
parctan
266664�N
R
i51
zi(XT 2 Xi)
�N
R
i51
zi(YT 2 Yi)
377775 , (21)
where NRdR5Rmax, the azimuth angle um 5 u0 1mdu
varies within the scanning sector, and the coordinates
fXi, Yig are determined with respect to the point of
minimum value of the mean radial velocity as a function
of azimuth angle at the fixed distance zi 5 b1 idR, that is,
FIG. 2. Geometry of lidar measurements for conical-sector scanning by the sensing beam in the
vicinity of the wind turbine (top view).
2560 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 30
Unauthenticated | Downloaded 12/07/21 04:56 AM UTC
Page 8
min[hVr(zi sinum, zi cosum)i]5 hVr(Xi, Yi)i. (22)
The interpolation used in obtaining the distribution
of the mean radial velocity hVr(X ,Y)i allows us to de-
fine dR and du to be much smaller than DR and Du,respectively.
From the resulting dependence of the velocity deficit
VD(R, 0) ondistanceR5 idR, where i5 0, 1, . . . ,Rmax/dR,
we estimated the maximum velocity deficit VDmax and
the wake length LW . The LW was defined to be the lo-
cation where the VD(R) dropped down to 10%.
4. Experiment
We conducted a field program using HRDL to study
the turbulent wind field in the vicinity of a wind turbine
in April 2011 at the National Renewable Energy Lab-
oratory (NREL) National Wind Technology Center
(NWTC), located about 10 km south of Boulder, Colo-
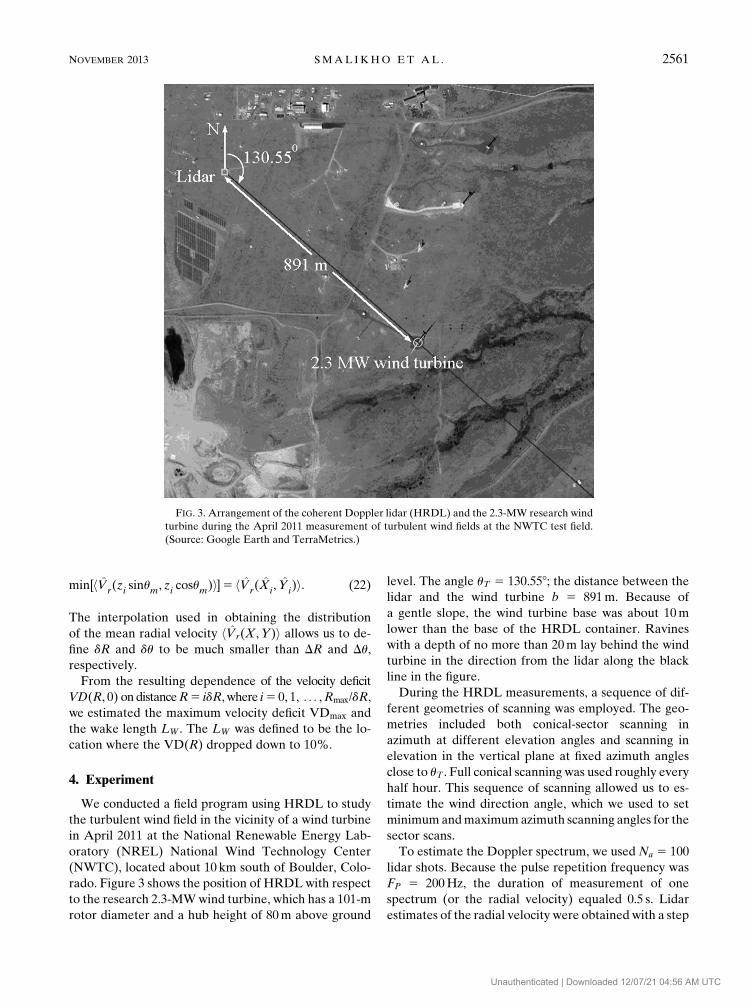
rado. Figure 3 shows the position of HRDL with respect
to the research 2.3-MWwind turbine, which has a 101-m
rotor diameter and a hub height of 80m above ground
level. The angle uT 5 130.558; the distance between the
lidar and the wind turbine b 5 891m. Because of
a gentle slope, the wind turbine base was about 10m
lower than the base of the HRDL container. Ravines
with a depth of no more than 20m lay behind the wind
turbine in the direction from the lidar along the black
line in the figure.
During the HRDL measurements, a sequence of dif-
ferent geometries of scanning was employed. The geo-
metries included both conical-sector scanning in
azimuth at different elevation angles and scanning in
elevation in the vertical plane at fixed azimuth angles
close to uT . Full conical scanning was used roughly every
half hour. This sequence of scanning allowed us to es-
timate the wind direction angle, which we used to set
minimum andmaximum azimuth scanning angles for the
sector scans.
To estimate the Doppler spectrum, we used Na 5 100
lidar shots. Because the pulse repetition frequency was
FP 5 200Hz, the duration of measurement of one
spectrum (or the radial velocity) equaled 0.5 s. Lidar
estimates of the radial velocity were obtained with a step
FIG. 3. Arrangement of the coherent Doppler lidar (HRDL) and the 2.3-MW research wind
turbine during the April 2011 measurement of turbulent wind fields at the NWTC test field.
(Source: Google Earth and TerraMetrics.)
NOVEMBER 2013 SMAL IKHO ET AL . 2561
Unauthenticated | Downloaded 12/07/21 04:56 AM UTC
Page 9
of DR 5 30m along the axis z0. The azimuth resolution
Du was 0.98 in the case of sector scanning. For full VAD
scanning, Du was 28 or 38.Examples of some realizations (without averaging and
interpolation) of two-dimensional distributions of
HRDL estimates of the radial velocity in the scanning
plane, including the distribution in the vertical plane
observed in these experiments, are reported in
Pichugina et al. (2011). The figures in Pichugina et al.
(2011) and Newsom and Banta (2004) for these distri-
butions show that, as the measurement range increases,
the number of bad estimates of the radial velocity also
increases because of the decrease in SNR. In addition,
estimates of the radial velocity are roughly zero at points
lying near the wind turbine as a result of the reflection of
the lidar pulse by the turbine blades (K€asler et al. 2010).
Therefore, to obtain the results presented below, we
used a specialized procedure, which allowed us to re-
place the velocity values at ‘‘zeroing’’ points with the
result of interpolation by neighboring points, at which
the radial velocity was estimated from aerosol back-
scatter unaffected by signal reflections off the turbine
blades. To minimize the influence of bad estimates on
the radial velocity at a long distance zi, we used the
procedure of filtering of good estimates through maxi-
mization of the functional
F(V)5 �N
n51
expf2[V2 Vr(zi, um;n)]2/(2s2)g (23)
[in place of Eq. (18)] when determining the 2D distri-
bution of the mean radial velocity. The parameter s was
taken as equal to 3m s21 in this case, that is, the mean
radial velocity was estimated as
max[F(V)]5F(hVr(zi, um)i) . (24)
Figure 4 illustrates the distribution of the radial ve-
locity in the scanning plane obtained from HRDL
measurements at elevation angles u5 28 (Fig. 4a) andu5 48 (Fig. 4b). For each of these two cases, we esti-
mated the wind direction angle uV using the technique
described in section 3. The white lines in Figs. 4a and 4c
are directed along the estimated wind direction angle
uV . Quantifications of the wind speeds along those lines
appear in Figs. 4b and 4d, and start from the turbine
FIG. 4. Distribution of the radial wind velocity in the scanning plane fX,Yg as obtained fromHRDLmeasurements at elevation angles
of (a) 28 and (c) 48 (c) from 2250 to 2300 LT 15 Apr 2011, and profiles of the wind velocity along lines 1 and 2 (starting from points marked
by white circles) at elevation angles of (b) 28 and (d) 48.
2562 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 30
Unauthenticated | Downloaded 12/07/21 04:56 AM UTC
Page 10
location (line 1) or the point A (line 2) at d5 1:2D 5120m (see section 3). The difference between the wind
velocities shown in the figure as curves 1 and 2 persists
for a longer downwind distance from the wind turbine at
u5 28 than at u5 48. At the same time, the maximum
deviation of velocities (consequently, the maximum
velocity deficit) took place at u5 48. This deviation was
related to the different position of scanning planes as
they intersected the turbine wake.
5. Results
For this case, sector scanning at elevation angles of 38–3.58was optimal for obtaining the information about the
wake structure. At a range of 890m (the location of the
turbine), heights of the laser beam relative to the wind
turbine base equaled 60m (20m below the turbine hub)
at u 5 38 and 67m (13m below the turbine hub) at u 53.58. At a range of 1890m, the heights of the laser beam
were 110m (u 5 38) and 128m (u 5 3.58) above the
turbine base elevation. Only these elevation angles (38and 3.58 alternately after each scan) were used for
HRDL measurements from 1920 LT 14 April 2011 to
1730 LT 15 April 2011. The duration of individual scan
sequences was, as a rule, 7min (57% of all cases) and
12min (41%). For each case, all data measured alter-
nately at elevation angles of 38 and 3.58 were used for
averaging [see Eqs. (23) and (24)]. We present the data
processing results of such measurements below.
Examples of the 2D distribution of the radial velocity
hVr(X,Y)i (Figs. 5a, 6a, and 7a), wind velocityUT(R)5U(R, 0) (curve 1) and UA(R) (curve 2) (Figs. 5b, 6b, and
7b), distribution of the wind-velocity deficit along the
wake axisVD(R, 0) (Figs. 5c, 6c, and 7c), and distributions
FIG. 5. (a) Distribution of the radial wind velocity in the scanning plane fX,Yg, as obtained from HRDL measurements at an
elevation angle of 38, from 1909 to 1916 LT 14 Apr 2011; (b) profiles of the wind velocity along white lines 1 and 2 starting from
points marked by white circles; (c) profiles of wind-velocity deficit VD(R, 0) along line 1, and (d) VD(R, x0) along the line per-
pendicular to lines 1 and 2 atR5 50m (curve 3,sT 5 51m), 150m (curve 4,sT 5 62m), 300m (curve 5,sT 5 74m), and 400m (curve 6,sT 578m).
NOVEMBER 2013 SMAL IKHO ET AL . 2563
Unauthenticated | Downloaded 12/07/21 04:56 AM UTC
Page 11
of the wind-velocity deficit perpendicular to the wake
VD(R, x0) at different distances from the wind turbine
(Figs. 5d, 6d, and 7d) are shown. One can see a significant
difference in the wake length and velocity deficit for
the three time periods under consideration. We esti-
mated the transverse size of the wake sT , by fitting the
Gaussian model exp[2(x0/sT)2] to the measured value
of VD(R, x0)/VD(R, 0) by the least squares method.
Estimates of sT , which were obtained from the data of
Figs. 5d, 6d, and 7d, vary from 43 to 83m. Individual
estimates at different distances R are provided in the
captions of Figs. 5–7. In general sT increases with in-
creasing R.
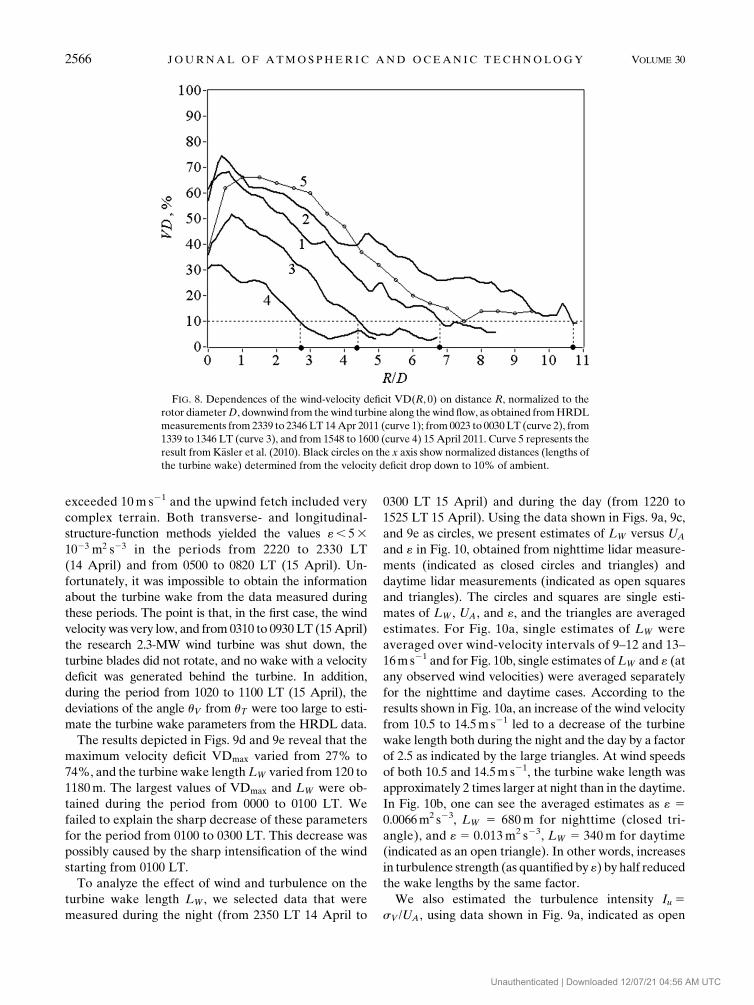
In Fig. 8, curves 1–4 show the dependency of velocity
deficit VD(R, 0) on the normalized distance on the lee-
ward side of the turbine, as obtained from HRDL
measurements. For comparison, curve 5 shows the ve-
locity deficit estimated from the data measured by
a CDL near Bremerhaven, Germany, during nighttime
at stable thermal stratification and very weak turbulence
(K€asler et al. 2010). It can be seen that curves 1 and 2,
obtained from nighttime HRDL data, are closest to
curve 5. The values of the normalized turbine wake
length LW /D are shown in the R/D axis as closed circles.
It can be seen that LW /D can change nearly tenfold for
different realizations. For the data shown in Fig. 8, the
maximum velocity deficit varied from 32% to 74%.
We used the data measured by full conical scanning
and an elevation angle of 108 (where there was no re-
flection of the signal by the wind turbine blades to
contaminate the measurement results) every half hour
for 24 h, starting from 1800 LT 14 April, to retrieve the
vertical profiles of the ambient wind velocity UA and
direction uV . The same lidar data were also used to re-
trieve vertical profiles of the turbulent parameters (such
as dissipation rate «, integral scaleLV , and wind-velocity
variance s2V) obtained using the transverse-structure-
function method described in section 2a. The resulting
FIG. 6. As in Fig. 5, but for 0018 to 0023 LT 15 Apr 2011and in (d) at R5 100m (curve 3, sT 5 60m), 300m (curve 4, sT 5 63m), 500m
(curve 5, sT 5 61m), and 1000m (curve 6, sT 5 76m).
2564 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 30
Unauthenticated | Downloaded 12/07/21 04:56 AM UTC
Page 12
temporal profiles of UA, uV , and « [indicated as the
turbulence energy dissipation rate (TEDR)] at h5 80m
(height of the wind turbine hub) are shown in Figs. 9a–c
as open squares connected with solid lines. Estimates of
the standard deviation sV [indicated as the standard
deviation of wind velocity (SDWV)] are shown in Fig. 9c
as closed squares connected by dashed lines. It can be
seen that during the period considered (from 1800 LT 14
April to 1800 LT 15 April), the wind velocity varied
from 2 to 18m s21. Most of the time, the wind velocity
exceeded 10m s21. In Fig. 9b, the obtained values of the
wind direction angle uV are shown by circles. These
circles aremostly concentrated near the dash-dotted line
that corresponds with the azimuth angle uT , between the
line passing through the lidar point in the direction to
the north and the line running through the lidar point
and the point of location of the turbine (see Fig. 3).
Typically, the deviations of the angle uV from uT did not
exceed 308 in absolute value, which allowed the turbine
wake information to be obtained from the lidar data and
main wake parameters to be monitored for almost the
entire period (when the turbine operated).
The processing procedures described earlier were used
to determine the ambientwind velocityUA (h5 80m) and
direction uV , themaximumvelocity deficit VDmax, and the
wake lengthLW , which are shown as circles in Figs. 9a, 9b,
9d, and 9e, from the lidar data measured by conical-sector
scanning across the wind turbine location. The same data
were also used to obtain the temporal profile of « at
a height of 80m, by using the longitudinal-structure-
functionmethod (see section 2b), which is shown as circles
in Fig. 9c. The results that are shown as circles and open
squares connected by solid lines in Figs. 9a–c are in a good
agreement most of the measurement time.
As seen in Fig. 9c, the experiment was mostly carried
out under conditions of strong («$ 1022 m2 s23) and
moderate (1023 m2 s23 # «, 1022 m2 s23) turbulence.
This was possibly related to the fact that wind speeds
FIG. 7. As in Fig. 5, but for 1518 to 1530 LT 15Apr 2011and in (d) atR5 50m (curve 3, sT 5 43m), 150m (curve 4, sT 5 65m), and 300m
(curve 5, sT 5 83m).
NOVEMBER 2013 SMAL IKHO ET AL . 2565
Unauthenticated | Downloaded 12/07/21 04:56 AM UTC
Page 13
exceeded 10m s21 and the upwind fetch included very
complex terrain. Both transverse- and longitudinal-
structure-function methods yielded the values «, 531023 m2 s23 in the periods from 2220 to 2330 LT
(14 April) and from 0500 to 0820 LT (15 April). Un-
fortunately, it was impossible to obtain the information
about the turbine wake from the data measured during
these periods. The point is that, in the first case, the wind
velocity was very low, and from 0310 to 0930 LT (15April)
the research 2.3-MW wind turbine was shut down, the
turbine blades did not rotate, and no wake with a velocity
deficit was generated behind the turbine. In addition,
during the period from 1020 to 1100 LT (15 April), the
deviations of the angle uV from uT were too large to esti-
mate the turbine wake parameters from the HRDL data.
The results depicted in Figs. 9d and 9e reveal that the
maximum velocity deficit VDmax varied from 27% to
74%, and the turbine wake lengthLW varied from 120 to
1180m. The largest values of VDmax and LW were ob-
tained during the period from 0000 to 0100 LT. We
failed to explain the sharp decrease of these parameters
for the period from 0100 to 0300 LT. This decrease was
possibly caused by the sharp intensification of the wind
starting from 0100 LT.
To analyze the effect of wind and turbulence on the
turbine wake length LW , we selected data that were
measured during the night (from 2350 LT 14 April to
0300 LT 15 April) and during the day (from 1220 to
1525 LT 15 April). Using the data shown in Figs. 9a, 9c,
and 9e as circles, we present estimates of LW versus UA
and « in Fig. 10, obtained from nighttime lidar measure-
ments (indicated as closed circles and triangles) and
daytime lidar measurements (indicated as open squares
and triangles). The circles and squares are single esti-
mates of LW , UA, and «, and the triangles are averaged
estimates. For Fig. 10a, single estimates of LW were
averaged over wind-velocity intervals of 9–12 and 13–
16ms21 and for Fig. 10b, single estimates ofLW and « (at
any observed wind velocities) were averaged separately
for the nighttime and daytime cases. According to the
results shown in Fig. 10a, an increase of the wind velocity
from 10.5 to 14.5m s21 led to a decrease of the turbine
wake length both during the night and the day by a factor
of 2.5 as indicated by the large triangles. At wind speeds
of both 10.5 and 14.5m s21, the turbine wake length was
approximately 2 times larger at night than in the daytime.
In Fig. 10b, one can see the averaged estimates as « 50.0066m2 s23, LW 5 680m for nighttime (closed tri-
angle), and « 5 0.013m2 s23, LW 5 340m for daytime
(indicated as an open triangle). In other words, increases
in turbulence strength (as quantified by «) by half reduced
the wake lengths by the same factor.
We also estimated the turbulence intensity Iu 5sV /UA, using data shown in Fig. 9a, indicated as open
FIG. 8. Dependences of the wind-velocity deficit VD(R, 0) on distance R, normalized to the
rotor diameterD, downwind from thewind turbine along the wind flow, as obtained fromHRDL
measurements from 2339 to 2346 LT 14Apr 2011 (curve 1); from 0023 to 0030 LT (curve 2), from
1339 to 1346 LT (curve 3), and from 1548 to 1600 (curve 4) 15 April 2011. Curve 5 represents the
result fromK€asler et al. (2010). Black circles on the x axis show normalized distances (lengths of
the turbine wake) determined from the velocity deficit drop down to 10% of ambient.
2566 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 30
Unauthenticated | Downloaded 12/07/21 04:56 AM UTC
Page 14
squares, and in Fig. 9c, indicated as closed squares. After
averaging single estimates of Iu for periods 0000–0300
LT (when averaged wake lengthLW ’ 680m) and 1200–
1500 LT (when averaged wake length LW ’ 340m),
we obtained Iu 5 0.09 and Iu 5 0.15, respectively.
Therefore, when the turbulence intensity increased by
a factor of 0:15/0:9’ 1:7, the wake length reduced by
half.
FIG. 9. Diurnal profiles of the (a) ambient wind velocity, (b) wind direction, (c) TEDR and SDWV, (d) VDmax, and (e) turbine wake
lengthLW , all at a height of 80m as obtained from the data measured by HRDL using full conical scanning (open squares areUA, uV , and
«, and closed squares indicate sV). The « is estimated from the transverse structure function of the radial velocity (open squares) and from
the longitudinal structure function of the radial velocity calculated from HRDLmeasurements using sector scanning (circles). Estimates
shown as circles were obtained from HRDL sector scan measurements.
NOVEMBER 2013 SMAL IKHO ET AL . 2567
Unauthenticated | Downloaded 12/07/21 04:56 AM UTC
Page 15
6. Conclusions
We investigated the turbulent wind field in the vicinity
of an operating wind turbine at the NWTC. In the field
experiment, our research team tested the method of
estimation of the turbulent energy dissipation rate from
the transverse structure function of the radial velocity
measured by a pulsed CDL using full 3608 conical
scanning. It was shown that this method was applicable
even in the case of one full conical scan. Methods were
also proposed for processing Doppler lidar–measured,
conical-sector scan data in the vicinity of a wind turbine
to estimate the wind speed and direction, the turbulent
energy dissipation rate, and parameters of the wake
generated by the wind turbine (maximum wind-velocity
deficit, and the longitudinal wake dimension).
FIG. 10. Turbine wake length versus (a) wind velocity and (b) turbulent energy dissipation
rate. Black circles and white squares are single estimates of UA, «, and LW from data
measured by HRDL at night (from 2350 LT Apr 14 to 0300 LT Apr 15) and during the day
(from 1220 to 1525 LT 15 Apr), respectively. Averaged estimates of LW that are within the
velocity intervals from 9–12m s21 and from 13–16m s21 are shown as black (nighttime) and
white (daytime) triangles in (a). The average estimate of LW and « over the indicated
measurement periods at night and during the day are shown as a black and white triangle,
respectively, in (b).
2568 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 30
Unauthenticated | Downloaded 12/07/21 04:56 AM UTC
Page 16
Using these approaches, we have determined the pa-
rameters of the turbulent wind field in the vicinity of the
wind turbine from measurements by the 2-mm pulsed
CDL on 14 and 15 April 2011, near Boulder, Colorado,
at the NWTC test field. In particular, it was found that
the wake behind the 2.3-MW research wind turbine,
with a rotor diameter of 101m and a hub height of 80m,
had the maximum velocity deficits of 27%–74% and
lengths from 120 to 1180m, depending on atmospheric
conditions. It has been shown that a doubling of the
turbulent energy dissipation rate (from .0066 to
0.013m2 s23) corresponded, on the average, to a halving
of the wake length (from 680 to 340m). Similarly, this
halving of the wake length is accompanied by an increase
in turbulence intensity by a factor of 1.7.
The study results indicate the high effectiveness of
using a pulsed 2-mm CDL to investigate turbulent wind
fields near wind power stations and wind farms, and
extend the range of problems addressed by atmospheric
laser sensing (Zakharov et al. 2010; Tsvyk et al. 2011;
Matvienko and Pogodaev 2012; Razenkov et al. 2012;
Banta et al. 2013). Future experiments similar to those
described in section 4 can yield the results necessary to
construct an empirical model of a turbine wake for
various atmospheric conditions.
Acknowledgments. We thank our colleagues from the
National Oceanic and Atmospheric Administration
(NOAA), including R. M. Hardesty, R.-J. Alvarez, S. P.
Sandberg, and A.M. Weickmann, and J. Mirocha from
the Lawrence Livermore National Laboratory for pre-
paring and conducting the experiment; John Brown from
NOAA for his help with weather forecasting; Andrew
Clifton from theNational Renewable Energy Laboratory
(NREL) for providing updates on tall-tower measure-
ments; Padriac Fowler and Paul Quelet for updates on
turbine operations; and Michael Stewart from NREL for
his help with security and safety issues. Funding for this
experiment was from the U.S. Department of Energy
Office of Energy Efficiency and Renewable EnergyWind
and Hydropower Technologies program. This work was
also supported by the Russian Foundation for Basic Re-
search (Project 10-05-9205) and theCivilianResearch and
Development Foundation (Project RUG1-2981-TO-10).
REFERENCES
Banakh, V. A., and I. N. Smalikho, 1997: Estimation of the tur-
bulence energy dissipation rate from the pulsed Doppler lidar
data. Atmos. Oceanic Opt., 10, 957–965.
——, ——, F. K€opp, and C. Werner, 1999: Measurements of tur-
bulent energy dissipation rate with a CW Doppler lidar in the
atmospheric boundary layer. J. Atmos. Oceanic Technol., 16,
1044–1061.
——, ——, Y. L. Pichugina, and W. A. Brewer, 2009: Represen-
tativeness of measurements of the turbulence energy dissipa-
tion rate by a scanning coherent Doppler lidar. Atmos.
Oceanic Opt., 22, 966–972.——, W. A. Brewer, Y. L. Pichugina, and I. N. Smalikho, 2010:
Wind velocity and direction measurement with a coherent
Doppler lidar under conditions of weak echo signal. Atmos.
Oceanic Opt., 23, 333–340.
Banta, R. M., R. K. Newsom, J. K. Lundquist, Y. L. Pichugina,
R. L. Coulter, and L. Mahrt, 2002: Nocturnal low-level jet
characteristics over Kansas during CASES-99. Bound.-Layer
Meteor., 105, 221–252.
——, Y. L. Pichugina, andW. A. Brewer, 2006: Turbulent velocity-
variance profiles in the stable boundary layer generated by
a nocturnal low-level jet. J. Atmos. Sci., 63, 2700–2719.
——,——, N. D. Kelley, R. M. Hardesty, andW. A. Brewer, 2013:
Wind energy meteorology: Insight into wind properties in the
turbine-rotor layer of the atmosphere from high-resolution
Doppler lidar. Bull. Amer. Meteor. Soc., 94, 883–902.
Barthelmie, R. J., L. Folkerts, F. T. Ormel, P. Sanderhoff, P. J.
Eecen, O. Stobbe, and N. M. Nielsen, 2003: Offshore wind
turbine wakesmeasured by sodar. J. Atmos. Oceanic Technol.,
20, 466–477.
——, ——, G. C. Larsen, K. Rados, S. C. Pryor, S. T. Frandsen,
B. Lange, and G. Schepers, 2006: Comparison of wake model
simulations with offshore wind turbine wake profiles mea-
sured by sodar. J. Atmos. Oceanic Technol., 23, 888–901.Bing€ol, F., J. Mann, and G. C. Larsen, 2010: Light detection and
ranging measurements of wake dynamics. Part I: One-
dimensional scanning. Wind Energy, 13, 51–61.
Browning, K. A., and R. Wexler, 1968: The determination of
kinematic properties of a wind field using Doppler radar.
J. Appl. Meteor., 7, 105–113.
Frehlich, R. G., and L. Cornman, 2002: Estimating spatial velocity
statistics with coherent Doppler lidar. J. Atmos. Oceanic
Technol., 19, 355–366.
——, S. M. Hannon, and S. W. Henderson, 1994: Performance
of a 2-mm coherent Doppler lidar for wind measurements.
J. Atmos. Oceanic Technol., 11, 1517–1528.
——, ——, and ——, 1998: Coherent Doppler lidar measurements
of wind field statistics. Bound.-Layer Meteor., 86, 223–256.——, Y. Meillier, M. L. Jensen, B. Balsley, and R. Sharman, 2006:
Measurements of boundary layer profiles in an urban envi-
ronment. J. Appl. Meteor. Climatol., 45, 821–837.Grund, C. J., R. M. Banta, J. L. George, J. N. Howell, M. J. Post,
R. A. Richter, and A. M. Weickman, 2001: High-resolution
Doppler lidar for boundary layer and cloud research. J. Atmos.
Oceanic Technol., 18, 376–393.
Hall, F. F., R. M. Huffaker, R. M. Hardesty, M. E. Jackson, T. R.
Lawrence, M. J. Post, R. A. Richter, and B. F. Weber, 1984:
Wind measurement accuracy of the NOAA pulsed infrared
Doppler lidar. Appl. Opt., 23, 2503–2506.
Hawley, J. G., R. Tang, S. W. Henderson, C. P. Hale, M. J.
Kavaya, and D. Moerder, 1993: Coherent launch-site at-
mospheric wind sounder: Theory and experiment. Appl.
Opt., 32, 4557–4567.
H€ogstr€om, U., D. N. Asimakopoulos, H. Kambezidis, C. G. Helmis,
and A. Smedman, 1987: A field study of the wake behind a
2MW wind turbine. Atmos. Environ., 22, 803–820.
K€asler, Y., S. Rahm, R. Simmet, and M. Kuhn, 2010: Wake mea-
surements of a multi-MW wind turbine with coherent long-
range pulsed Doppler wind lidar. J. Atmos. Oceanic Technol.,
27, 1529–1532.
NOVEMBER 2013 SMAL IKHO ET AL . 2569
Unauthenticated | Downloaded 12/07/21 04:56 AM UTC
Page 17
Kelley, N. D., B. J. Jonkman, G. N. Scott, and Y. L. Pichugina,
2007: Comparing pulsed Doppler lidar with sodar and direct
measurements for wind assessment. Windpower Conf. and
Exhibition, Los Angeles, CA, American Wind Energy Asso-
ciation, NREL/CP-500-417.
K€opp, F., R. L. Schwiesow, and C. Werner, 1984: Remote mea-
surements of boundary layer wind profiles using a CW
Doppler lidar. J. Climate Appl. Meteor., 23, 148–154.——, S. Rahm, I. Smalikho, A. Dolfi, J.-P. Cariou, M. Harris, and
R. I. Young, 2005: Comparison of wake-vortex parameters
measured by pulsed and continuous-wave lidars. J. Aircr., 42,
916–923.
Magnusson, M., and A.-S. Smedman, 1996: Practical method to
estimate wind turbine wake characteristics from turbine data
and routine wind measurements. Wind Eng., 20, 73–92.Matvienko, G. G., and V. A. Pogodaev, 2012: Atmospheric and
ocean optics as uncompleted task of interaction of optical
radiation with a propagation medium. Atmos. Oceanic Opt.,
25, 5–10.Monin, A. S., and A. M. Yaglom, 1975: Mechanics of Turbulence.
Vol. 2, Statistical Fluid Mechanics, The MIT Press, 874 pp.
Newsom, R. K., and R. M. Banta, 2004: Assimilating coherent
Doppler lidar measurements into a model of the atmospheric
boundary layer. Part I:Algorithmdevelopment and sensitivity to
measurement error. J. Atmos. Oceanic Technol., 21, 1328–1345.
O’Connor, E. J., A. J. Illingworth, I. M. Brooks, C. D. Westbrook,
R. J. Hogan, F. Davies, and B. J. Brooks, 2010: A method for
estimating the kinetic energy dissipation rate from a vertically
pointing Doppler lidar, and independent evaluation from
balloon-borne in situ measurements. J. Atmos. Oceanic
Technol., 27, 1652–1664.
Pichugina, Y. L., and R. M. Banta, 2010: Stable boundary-layer
depth from high-resolution measurements of the mean wind
profile. J. Appl. Meteor. Climatol., 49, 20–35.——, S. C. Tucker, R. M. Banta, W. A. Brewer, N. D. Kelley, B. J.
Jonkman, and R. K. Newsom, 2008: Horizontal-velocity and
variance measurements in the stable boundary layer using
Doppler lidar: Sensitivity to averaging procedures. J. Atmos.
Oceanic Technol., 25, 1307–1327.
——, andCoauthors, 2011:Wind turbinewake study by theNOAA
high-resolutionDoppler lidar.Proc. 16th Coherent Laser Radar
Conf.,LongBeach,CA,Universities SpaceResearchAssociation,
4 pp. [Available online at http://sti.usra.edu/clrc2011/
presentations/Session%209/Summary%20Y%20Pichugina.
pdf.]
Rahm, S., and I. Smalikho, 2008: Aircraft wake vortex measure-
ment with airborne coherent Doppler lidar. J. Aircr., 45, 1148–
1155.
Razenkov, I. A., E. W. Eloranta, J. P. Hedrick, and J. P. Garcia,
2012: Arctic high spectral resolution lidar. Atmos. Oceanic
Opt., 25, 94–102.
Smalikho, I. N., 1997: Accuracy of the turbulent energy dissipation
rate estimation from the temporal spectrum of wind velocity
fluctuations. Atmos. Oceanic Opt., 10, 559–563.
——, 2003: Techniques of wind vector estimation from data mea-
sured with a scanning coherent Doppler lidar. J. Atmos.
Oceanic Technol., 20, 276–291.——, and V. A. Banakh, 2013: Accuracy of estimation of the tur-
bulent energy dissipation rate from wind measurements by
a pulsed coherent Doppler lidar at conical scanning by the
probing beam. Part I. Algorithm of data processing. Atmos.
Oceanic Opt., 26, 404–410.
——, F. K€opp, and S. Rahm, 2005: Measurement of atmospheric
turbulence by 2-mm Doppler lidar. J. Atmos. Oceanic Tech-
nol., 22, 1733–1747.
——, V. A. Banakh, Y. L. Pichugina, and W. A. Brewer, 2013:
Accuracy of estimation of the turbulent energy dissipation
rate from wind measurements by a pulsed coherent Doppler
lidar at conical scanning by the probing beam. Part II. Nu-
merical and atmospheric experiment. Atmos. Oceanic Opt.,
26, 411–416.Sonnenschein, C. M., and F. A. Horrigan, 1971: Signal-to-noise
relationships for coaxial systems that heterodyne backscatter
from the atmosphere. Appl. Opt., 10, 1600–1604.
Trujillo, J.-J., F. Bing€ol, G. C. Larsen, J. Mann, and M. K€uhn,2011: Light detection and ranging measurements of wake
dynamics. Part II: Two-dimensional scanning. Wind Energy,
14, 61–75.
Tsvyk, R. S., V. M. Sazanovich, and A. N. Shesternin, 2011:
Pointing of a laser beam based on laser beam aerosol back-
scattering. Modeling experiment. Atmos. Oceanic Opt., 24,
1056–1060.
Vermeer, L. J., J. N. Sorensen, and A. Crespo, 2003: Wind turbine
wake aerodynamics. Prog. Aerosp. Sci., 39, 467–510.
Vinnichenko, N. K., N. Z. Pinus, S. M. Shmeter, and G. N. Shur,
1973: Turbulence in the Free Atmosphere.Consultant’s Bureau,
263 pp.
Zakharov, V. M., O. K. Kostko, and V. U. Khattatov, 2010: Laser
applications for atmospheric research in CAO.Atmos. Oceanic
Opt., 23, 854–859.
2570 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 30
Unauthenticated | Downloaded 12/07/21 04:56 AM UTC