Page 1
I
T.C.
DOKUZ EYLÜL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNA MÜHENDİSLİĞİ BÖLÜMÜ
12 m’lik OTOBÜSÜN ÇİFT ENİNE YÖN VERİCİLİ
ASKI SİSTEMİNİN SAYISAL MODELLENMESİ
BİTİRME PROJESİ
UFUK ÇOBAN
PROJEYİ YÖNETEN
Prof. Dr. NUSRET SEFA KURALAY
HAZİRAN 2012
İZMİR
Page 2
II
TEZ SINAV SONUÇ FORMU
Bu çalışma … / … / …. günü toplanan jürimiz tarafından BİTİRME PROJESİ olarak kabul
edilmiştir.
Yarıyıl içi başarı notu 100 (yüz) tam not üzerinden ……… ( …………….…. ) dir.
Başkan Üye Üye
Makine Mühendisliği Bölüm Başkanlığına,
………………….. numaralı ………………… jürimiz tarafından … / … / …. günü saat …… da
yapılan sınavda 100 (yüz) tam not üzerinden ……. almıştır.
Başkan Üye Üye
ONAY
Page 3
III
TEŞEKKÜR
Bitirme projesinin hazırlanmasında yardımlarını esirgemeyen hocalarım Sayın Prof. Dr. N.
Sefa KURALAY’a ve Sayın Dr. M. Murat TOPAÇ’a yardımlarından dolayı teşekkürlerimi
sunarım.
Ufuk ÇOBAN
Page 4
IV
ÖZET
12 m’lik bir aracın ön aksında uygulanması düşünülen bağımsız askı sisteminin şasiye
bağlantı mafsallarına gelen kuvvet analizi yapılmıştır. Aracın farklı yol koşullarında mafsal
noktalarına gelen kuvvetler matlab programıyla oluşturulan denklemlerle üç boyutlu olarak
incelenmiştir.
Hesaplama sırasında vektörel olarak yazılan denklemler tekerleğin şasiye iletilen moment
ve kuvvet dengesi kurularak oluşturulmuştur. Bu sayede farklı yol koşullarında mafsallarda
oluşan kuvvet bileşenleri bulunmuştur. Oluşan ani hız değişimleriyle de meydana gelen
atalet tork ve kuvvetleri de sisteme ilave edilmiştir.
Hız ve açısal ivme değerleri Solidworks simülasyonu ile karşılaştırılmıştır. Oluşturulan
matlab programı yardımı ile kuvvetler hesaplanmış ve bu kuvvetler; Ansys Workbench
programıyla mafsallara gelen kuvvetler kontrol edilmiştir.
Page 5
V
İÇİNDEKİLER
İÇİNDEKİLER
BÖLÜM BİR-GİRİŞ 1
1.1 Giriş 1
1.2 Sabit aks sistemleri 2
1.3 Bağımsız askı sistemler 3
1.3.1 Enine yön vericili askı sistemleri 4
1.3.2 Yay bacaklı ve enine yön vericili askı sistemi 5
BÖLÜM İKİ-BAĞIMSIZ ASKI SİSTEMİNİN KİNEMATİK
MODELLENMESi 7
2.1 Giriş 7
2.2 Enine yön vericili askı sistemleri 7
2.3.Ön düzen açı ve ayarları 7
2.4.Parça kesit resimleri 11
BÖLÜM ÜÇ- 3 BOYUTLU DENKLEMLER 13 3.1 Konum denklemleri 13
3.2.Hız denklemleri 15
3.3.İvme denklemleri 16
3.4 Atalet ivme denklemler 18
3.5.Kuvvet denklemleri ve serbest cisim diyagramı 19
3.5.1.Altsalıncak kuvvet denklemleri ve serbest cisim diyagramı 20
3.5.2.Akson kuvvet denklemleri ve serbest cisim diyagramı 21
3.5.3.Üst salıncak kuvvet denklemleri ve serbest cisim diyagramı 21
Page 6
VI
3.5.4.Muylu kuvvet denklemleri ve serbest cisim diyagramı 22
3.5.5 Tekerlek kuvvet denklemleri ve serbest cisim diyagramı 22
3.5.6.Kuvvet denklemleri 23
BÖLÜM DÖRT-MATLAB PROGRAMI 24
4.1.Giriş 24
4.2 Matlab programı 24 BÖLÜM BEŞ-KİNEMATİK BÜYÜKLÜKLERİN KONTROLÜ 34 5.1.Hız denklemleri kontrolü 34
5.2.İvme denklemi kontrolü 35
5.3.Atalet ivme değerleri 37
5.4.Solidworks ile matlab programının karşılaştırılması 40
5.5 Solidworks simülasyonda yapılmış analizin örnek bir uygulaması 43
5.6.Vektörel işlemler 44
5.6.1.Noktaların kuvvet moment dengesi 45
BÖLÜM ALTI-ANALİZ 47
6.1.Üst salıncak analizi 47
6.2 Akson analizi 50
6.3.Alt salıncak analizi 53
BÖLÜM YEDİ-SONUÇLAR 57
BÖLÜM SEKİZ- EKLER 58
Page 7
VII
ŞEKİL TABLOSU
Şekil 1 Sabit kamyon aksı 2
Şekil 2 Sabit ve serbest dingil sistemi 4
Şekil 3 Enine yön vericili askı sistemi 5
Şekil 4 Mc Pherson askı sistemi 6
Şekil 5 Akson gövdesi 8
Şekil 6 Alt salıncak 8
Şekil 7 Çift salıncaklı askı sistemi 8
Şekil 8 Tekerlek açıları 9
Şekil 9 Kaster açısı 10
Şekil 10 Üst salıncak ölçüleri 11
Şekil 11 Alt salıncak ölçüleri 11
Şekil 12 Montaj ölçüleri 11
Şekil 13 Kesit resmi 12
Şekil 14 Montaj resmi 12
Şekil 15 Alt salıncak konum vektörlerinin tanımlanması 13
Şekil 16 Akson konum vektörlerinin tanımlanması 14
Şekil 17 Üst salıncak konum vektörlerinin tanımlanması 14
Şekil 18 Alt salıncak hız vektörleri gösterimi 15
Şekil 19 Akson hız vektörleri gösterimi 15
Şekil 20 Üst salıncak hız vektörleri gösterimi 16
Şekil 21 Alt salıncak ivme vektörleri gösterimi 17
Şekil 22 Akson ivme vektörleri gösterimi 17
Şekil 23 Üst salıncak ivme vektörleri gösterimi 18
Şekil 24 Alt salıncak kuvvet vektörleri ve SCD 19
Şekil 25 Akson kuvvet vektörleri ve SCD 20
Page 8
VIII
Şekil 26 Üst salıncak kuvvet vektörleri ve SCD 21
Şekil 27 Muylu kuvvet vektörleri ve SCD 22
Şekil 28 Tekerlek kuvvet vektörleri ve SCD 22
Şekil 29 Catia montaj koordinatları 24
Şekil 30 Zeminden gelen kuvvetlerin mafsallara iletilirken izlediği yol 32
Şekil 31 Hız matrisi 32
Şekil 32 İvme matrisi 33
Şekil 33 Kuvvet matrisi 33
Şekil 34 Matlab çıktısı 39
Şekil 35 Program verileri 40
Şekil 36 Matlab ve Solidworks programının karşılaştırılması 41
Şekil 37 Açıların birbirlerine göre değişimi 42
Şekil 38 Solidworks ve matlab programın açısal hız değişimleri 42
Şekil 39 Solidworks ve matlab programın açısal ivme değişimleri 42
Şekil 40 Solidworks simülasyonun 0.266 saniyedeki açısal hız gösterimi 43
Şekil 41 Simülasyon sonucu 43
Şekil 42 Mafsalların kuvvet bileşenleri 44
Şekil 43 Mafsalların kuvvet bileşenleri [detaylı] 44
Şekil 44 Noktaların SPa' ya göre konum vektörleri 45
Şekil 45 Üst salıncağın mesh yapılmış hali 47
Şekil 46 Üst salıncağın kuvvet girdilerinin Ansys 'e girilmesi 47
Şekil 47 Üst salıncağın gerilme değerleri gösterimi 48
Şekil 48 A5 noktasına gelen mafsal kuvvetini tabular data şeklinde gösterimi 48
Şekil 49 Üst salıncak için kuvvet girdileri 49
Şekil 50 Ansys ve Matlab programını karşılaştırmalı sonuçları 49
Şekil 51 Grafiksel olarak Ansys ve Matlab sonuçlarının karşılaştırılması 49
Şekil 52 Aksonun mesh yapılmış hali 50
Page 9
IX
Şekil 53 Aksonun kuvvet ve momentlerinin girilmesi 50
Şekil 54 Aksonun A4 noktasına gelen mafsal kuvvetlerinin gösterilmesi 51
Şekil 55 Aksonun gerilme dağılımının gösterimi 51
Şekil 56 Matlab kuvvet girdileri tablosu 52
Şekil 57 Akson Ansys girdileri tablosu 52
Şekil 58 Matlab ve Ansys beraber sonuç tablosu 52
Şekil 59 A4 mafsal noktasına gelen kuvvetlerin gösterimi 53
Şekil 60 Alt salıncak mesh yapılmış hali 53
Şekil 61 Alt salıncak için kuvvet ve momentlerinin girilmesi 54
Şekil 62 Alt salıncak gerilmesinin gösterilmesi 54
Şekil 63 Alt salıncak mafsal noktalarındaki kuvvetlerin gösterimi 55
Şekil 64 Alt salıncak mafsal noktalarındaki kuvvetlerin gösterimi 55
Şekil 65 Matlab sonuçların beraber ekran da grafiksel olarak gösterilmesi 56
Page 10
1
BÖLÜM BİR
1.1 Giriş
Araç yol tutuş yetenekleri sürüş güvenliğinin sağlanmasındaki en önemli faktördür.
Otomobilin yerle bağlantısı ve yol tutuşu birçok parçanın birlikte çalışmasıyla sağlanır.
Yürüyen aksam, direksiyon sistemi, süspansiyon sistemi, fren sistemi ve tekerlekler belli bir
düzen ile karosere bağlıdır.
Ön ve arka tekerlek askı sistemleri tekerlek göbeği ve karoseri(şasi) arasındaki hareketli
bağlantı elemanlarıdır. Araç gövdesi ile tekerlekler arasına yerleştirilen süspansiyon sistemi,
yolun yapısından kaynaklanan titreşimleri sönümlemek üzere tasarlanmıştır. Süspansiyon
sistemi sürüş konforu ve güvenliği açısından ihtiyaç duyulan bir sistemdir.
Görevleri fren, tahrik ve yan kuvvetle bağlantılı olarak tekerleği boyuna, enine yönde
şasiye göre kılavuzlamak, diğer taraftan yoldan gelen tekerlekler üzerinden araç gövdesine
iletilen düşey hareketleri almak için kullanılan yay ve stabilizatörlerin desteklemesini
sağlamaktadır. Yaylanma ve tekerlek tahrikinin tipine bağlı olarak farklı şekillerdeki ask
konstrüksiyonları, yani aks sistemleri kullanılabilir.
Örneğin sabit akslar otomobillerde sabit aks olarak uygulanırken, ön aksta motor altında
fazla yere gerek olmasından kullanılmaz. Kamyonlarda sabit asklar büyük taşıma kapasiteleri
nedeniyle her iki aksta da kullanılmaktadır. Bağımsız askı sistemleri daha çok ön tekerlekler
için uygundur. Düşük hacim talebi ve her iki tekerleğin birbirinden bağımsız olması nedeniyle
arka asklarda da gittikçe artan oranda kullanılmaktadır.
Tekerlek askı sistemleri bağlantı tiplerine göre ikiye ayrılmaktadır. Bunlar;
1.Sabit Askı Sistemi
2.Bağımsız Askı Sistemi
Page 11
2
Süspansiyon sisteminin özellikleri;
Sürüş esnasında lastikler ile birlikte çalışarak yolcuları veya taşınan yükü korumak ve sürüş
konforunu iyileştirmek amacıyla yol yüzeyinin yapısından kaynaklanan titreşimleri, salınımları
ve ani şokları sönümleyerek yumuşatır. Aynı zamanda şasi ve kaportayı da korumuş olur.
Yol yüzeyi ile tekerlekler arasındaki sürtünmeye bağlı olarak ortaya çıkan sürüş ve fren
kuvvetlerini gövdeye aktarır. Akslar üzerinde gövdeyi taşır ve gövde ile tekerlekler arasındaki
uygun geometrik ilişkiyi sağlar. Yol ile tekerlekler arasında teması kaybetmeden güvenli
dönüş yapmayı sağlar.
1.2 Sabit Aks Sistemleri
Bilinen en eski askı sistemidir. Sabit akslar, rijit bir aks ile birbirine bağlanması ile oluşur.
Bu sistemler şasiye yaprak yaylar ve yön verici kollar yardımıyla bağlanırlar. Bu tipte
tekerleğin birine verilen hareket diğerlerine de aktarılmış olur. Sabit aksların en büyük
dezavantajı, bir tekerleğin bir engeli aşması sırasında oluşan kamber değişiminin aksın aldığı
eğimli pozisyon nedeniyle diğer tekerleği de etkilemesidir. Ancak ekonomik olması ve yüksek
taşıma kapasitesine olanak tanımasından sabit aks sistemleri genellikle ticari araçlarda
(kamyon, kamyonet.vb ) ve bazı binek otomobillerin arka aksında kullanılırlar.
Şekil 1 Sabit kamyon aksı
Page 12
3
Sabit aks avantajları;
Basit olmaları ve ekonomik olarak imal edilebilmeleri;
Tam yaylanma da hemen hemen hiç denecek kadar iz genişliği ve kamber açısı değişimine
sebep olmaları, yani düşük lastik aşıntısı, buzlu ve kirli yollarda iyi bir sürme emniyetine sahip
olmalıdır. Bağımsız askı sistemlerinin tersine sabit akslar virajda kütlesi nedeniyle aksa
etkiyen merkezkaç kuvvetinin oluşturduğu moment (Mu=S.h) karosere iletmez, kendisi taşır.
Bu yüzden bağlantı noktaları ek olarak zorlanmaz.
Virajda şasinin yana yatması sonucu tekerleklerde kamber açısın değişiminin olmaması,
Sabit aks boyunca yön vericilerin veya yaprak yayların belirli eğimle bağlanmasıyla virajda
aracın çok döner özelliği azaltılabilir. Viraj dışında tekerleğin yaylanması sonucu hafif bir aks
aralığı büyümesine uğrar. Bu sayede aksın kendisi hafifçe içine doğru yönelmiş olur. Buda
tüm aracın viraj dışına doğru yönlenmesine sebep olur.
1.3 Bağımsız Askı Sistemleri
Binek taşıtlarda aks konstrüksiyonları için kısıtlı alan bulunması ve konfor ihtiyacı bağımsız
askı sistemlerinin ortaya çıkmasına neden olmuştur. Bağımsız askı sistemleri, küçük boyutlara
sahip olmakla birlikte konstrüksiyon ve imalatları sabit akslara oranla daha güçtür. Ancak
bağımsız askı sistemi konstrüksiyonlarındaki yağlandırılmamış kütlenin azlığı taşıdın seyir
konforunu ve tekerlek -yol temasını olumlu yönde etkilemektedir. İleriki bölümlerde
taşıtların ön ve arka aks konstrüksiyonlarında sıklıkla kullanılan dört adet askı sistemi yer
verilmiştir.
Bağımsız olarak enine, boyuna ve diyagonal yön vericilerle karosere asılan tekerler
öncelikle otomobil yapımında uygulanır. Burada artan hız ile birlikte artan konfor talebi
tekerleklerin daha kesin yönlendirilmesini ve özellikle araca kazandıracak seyir özelliklerinin
askı sistemleri ile kazandırılması gerektirmektedir. Yön verici kolların hedefe yönelik olarak
düzenlenmesiyle, yaylanma esnasında tekerlek açılarının iz genişliklerinin ve aracın özgül
yönlenme davranışı değişimi sağlanabilir.
Page 13
4
Avantajları ;
Az yer talebi
Düşük yaylandırılmamış kütle
Bir tekerleğin yaylanması sonucu diğerinin etkimemesidir.
Dezavantajları;
Konstrüksiyon ve imalatlarının güçlüğü
Askı sistemlerinin boyuna ve yanal yönde etkileyen kuvvetler kısmen fazlaca zorlanan boyuna
ve enine yön verici kollarla karşılaşır. Bu yüzden ilave bağlantı noktaları gerektirir.
Bağımsız askı sistemlerinin, karoseri virajdaki yalpa hareketinde birlikte eğim alması pozitif
kamber açısı değişimine uğraması tekerleklerin yan kuvvet alam kapasitelerini olumsuz
etkiler. Şasinin virajdaki yalpa hareketi mümkün olduğunca küçük olmalıdır.
Buna ulaşmak için stabilizatör olmalıdır.
Şekil 2 Sabit ve serbest dingil sistemi
1.3.1 Enine Yön Vericili Askı Sistemleri
İki enine yön vericiye, yani enine yön vericiye tekerleklerin asılması durumunda aracın
düşey yaylanması esnasında uygulamaya bağlı olarak hemen iç ya da çok az miktarda bir iz ve
kamber açısı değişimi ortaya çıkar. Aynı uzunluktaki yön vericilerde (trapez form)ise iz
genişliği gibi kamber açısında da az bir değişim meydana gelir. Hareket yönündeki
mukavemeti artırmak için üçgen formundaki enine yön vericiler kullanı lır. Bunlar karoseriyle
veya şasiye iki yatak ile bağlanır. Yön verici kolların uygun şekilde düzenlemesi ile ani dönme
Page 14
5
merkezinin yeri ve aks yalpa merkezinin yüksekliği istenilen şekilde değiştirilebilir. Düşey
yüklerin alınması için helisel, yaprak ve burulma yayları çift enine yön verici askı sisteminde
uygulanabilmektedir.
Şekil 3 Enine yön vericili askı sistemi
1.3.2 Yay bacaklı ve enine yön vericili askı sistemi(Mc Pherson Askı Sistemleri)
Mc Pherson yay bacaklı askı sistemi, çift enine yön vericili askı sistemlerinden türetilmiştir.
Üst enine yön vericili, dingil pimine bağlı çift borulu bir amortisör ile yer
değiştirilmiştir.(Kuralay,2008a).Amortisörün piston kolu elastik bir yatak içerisindeki küresel
mafsal ile karosere tespit edilmiştir. Bu bağlantı noktalar arası helisel bir yay bulunmaktadır.
Yay bacağı fren, ivmelenme ve yanal kuvvet almak zorunda olduğu için piston ve piston kolu
yataklanması oldukça zordur. Bu askı sisteminden belirgin avantajları ekonomik olarak imal
edilmesi, düşük yer talebi ve askı sisteminin belirgin avantajları ekonomik olarak imal
edilmesi, düşük yer talebi ve askı elemanlarında tasarruftur. Tekerleğin yaylanmasında, bu
amortisör ve amortisör ile eş merkezli olarak yerleştirilmiş helisel bir yay ile kontrol
edilmektedir.
Page 15
6
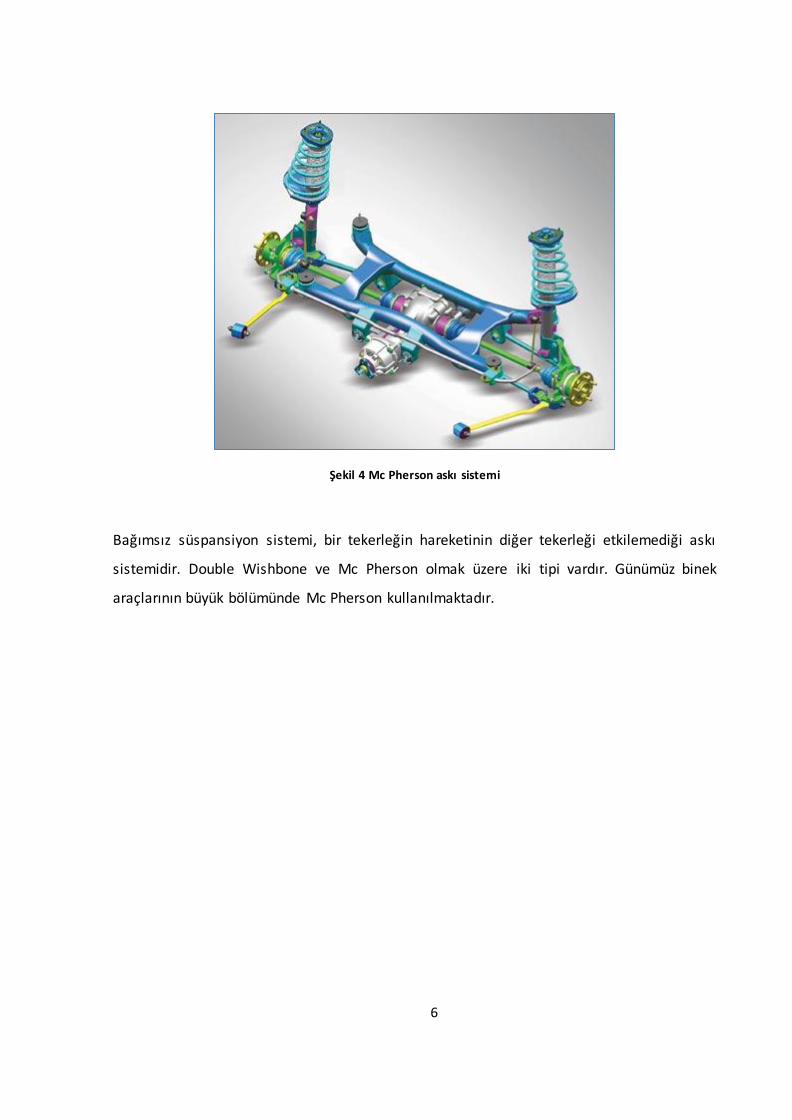
Şekil 4 Mc Pherson askı sistemi
Bağımsız süspansiyon sistemi, bir tekerleğin hareketinin diğer tekerleği etkilemediği askı
sistemidir. Double Wishbone ve Mc Pherson olmak üzere iki tipi vardır. Günümüz binek
araçlarının büyük bölümünde Mc Pherson kullanılmaktadır.
Page 16
7
BÖLÜM İKİ
BAĞIMSIZ ASKI SİSTEMİNİN KİNEMATİK MODELLENMESİ
2.1 Giriş
Bu bölümün birinci kısmında enine yön vericili aks sisteminin otobüslerde alçak tabanlı ve
daha konforlu araçlar istendiğinden bu çift salıncaklı askı sistemi incelenmiştir. Bağımsız askı
sisteminin oluşturulan matematik modeli, MATLAB programı yardımıyla kinematik açıdan
incelenmiştir. Daha sonra Solidworks yazılımıyla açısal hız ve ivme değerleri kontrol
edilmiştir. Ansys Workbench yazılımıyla yapılan modelin mafsallarına gelen kuvvetlerin
bulunmasıdır.
Üçüncü kısımda, kurulan matematik modellerin MATLAB programıyla yapılan kinematik
analizinden elde edilen sonuçlar karşılaştırılmıştır. Mafsal noktalarına gelen kuvvetlerin açı
değişimine farklı yol şartlarında davranışı incelenmiştir.
2.2 Enine Yön Vericili Askı Sistemleri
İki enine yön vericiye, yani enine yön vericiye tekerleklerin asılması durumunda aracın
düşey yaylanması esnasında uygulamaya bağlı olarak hemen iç ya da çok az miktarda bir iz ve
kamber açısı değişimi ortaya çıkar. Aynı uzunluktaki yön vericilerde (trapez form)ise iz
genişliği gibi kamber açısında da az bir değişim meydana gelir. Hareket yönündeki
mukavemeti artırmak için üçgen formundaki enine yön vericiler kullanılır. Bunlar karoseriyle
veya şasiye iki yatak ile bağlanır. Yön verici kolların uygun şekilde düzenlemesi ile ani dönme
merkezinin yeri ve aks yalpa merkezinin yüksekliği istenilen şekilde değişti rilebilir. Düşey
yüklerin alınması için helisel, yaprak ve burulma yayları çift enine yön verici askı sisteminde
uygulanabilmektedir.
Page 17
8
Şekil 5 Akson gövdesi Şekil 6 Alt salıncak
Şekil 7 Çift salıncaklı askı sistemi
Page 18
9
2.3.Ön düzen açı ve ayarları
Bir aracın direksiyon hâkimiyetinin iyi olmasını, ön takım elemanlarının uzun ömürlü
olmasını ve lastiklerin dengeli aşınmasını sağlanması için tekerleklere verilmesi gereken açı
ve ayarlardır.
Ön Düzen Açı ve Ayarlarının Çeşitleri ve Önemi:
Ön düzen açıları ve ayarları denildiğinde aşağıdaki hususlar alınmıştır.
1. Kamber açısı,
2. Direksiyon ekseni eğikliği veya açısı . (başlık pimi, king-pim, aks başı eğikliği veya açısı)
3. Kaster açısı,
4. Toe-in
5. Dönüşlerdeki toe-out
Ön düzen açıları araç kataloğunda belirtilen sürelerde veya ön düzenle ilgili problemler
oluştuğunda kontrol edilerek gerekli ayarlar yapılır. Aksi halde aracın direksiyon hâkimiyeti
kalmaz, lastikler, bilyalı yataklar ve dingil pimi ve yatakları zamanından önce aşınır.
Kamber açısı: Bir aracın önünden bakıldığında, tekerlek ekseninin düşey eksene göre yaptığı
açıya kamber açısı denir.
Tekerleğin, aracın dışına doğru yaptığı açıysa pozitif (+) kamber açısı, aracın içine doğru
yaptığım açıya negatif (-) kamber açısı adı verilir. Kamber açısı doğru ayarlanmış bir
tekerlekte, direksiyon ekseni ile tekerlek ekseni, tekerleğin yola temas noktasında birleşir.
Şekil 8 Tekerlek açıları
Kamber açısının veriliş nedeni; tekerlek ekseninin, yol üzerinde araç yükünün altına
yaklaşmasının önemi ve etkileri şunlardır.
Page 19
10
1. Lastiklerin dengeli aşınmasını sağlar.
2. Ön teker bilyalı yatakları ile aks başı yataklarının (burç veya rotil) uzun ömürlü olmasını
sağlar,
3. Direksiyonun kolay dönmesini sağlar.
Kamber açısının uygun olmaması ise; lastiklerin içten veya dıştan tek taraflı aşınmasına,
tekerlek yataklarının, aks başı yataklarının kısa zamanda aşınmasına, direksiyonun ağır
olmasına veya bir tarafa çekmesine neden olur.
Direksiyon ekseni eğikliği: Rotillerin veya başlık pimi ekseninin üst ucunun düşeye oranla,
aracın merkezine doğru olan eğikliğine direksiyon ekseni eğikliği (başlık pimi eğikliği, king-pim
eğikliği veya aks başı eğikliği) veya açısı denir.
Direksiyon ekseni eğikliğinin önemi ve etkileri:
Direksiyon ekseni eğikliğinin veriliş nedeni; tekerlek ekseninin, direksiyon ekseni ile yol
üzerinde birleştirmektedir. Tekerlek ekseni ile direksiyon ekseni tekerleğin yola temas etme
noktasında birleşmesi araç yükünün lastikler üzerine dengeli dağılmasını sağlar. Araç
yükünün dengeli olarak lastikler üzerinde dağılmasının önemi ve etkileri şunlardır.
1. Lastikler dengeli aşınır,
2. Direksiyon daha kolay döner ve viraj çıkışı direksiyonun kendiliğinden toplamasını sağlar.
3. Fazla kaster açısına ihtiyacı azaltır.
Kaster açısı: Ön tekerin iç kısmından bakıldığında başlık pimi veya rotillerin yani direksiyon
ekseninin düşey eksenle yapmış olduğu açıya kaster açısı denir. Direksiyon ekseninin yatma
yönü; aracın içine doğru ise pozitif kaster, dışına doğru ise negatif kaster adını alır.
Şekil 9 Kaster açısı
Page 20
11
Toe-in açısı (tekerleklerin içe kapanıklılığı):Bir aracın ön tarafından ve üstten bakıldığında
ön tekerlerin ön kısmının arka kısmına göre bir miktar kapalı olma durumuna toe-in denir.
Toe-in açısının veriliş nedeni; seyir esnasında ön tekerlerin ön kısmının arka kısmına oranla
açılmak istemesinin önüne geçmektir. Toe-in değeri bazen mesafe bazen de açı olarak verilir.
Dönüş açısı veya dönüşlerdeki toe-out açısı:Bir aracın dönüş esnasında, ön
tekerleklerinde oluşan açı farklılığını ifade eder. Dışta kalan ön tekerlek daha küçük bir açı ile,
içte kalan ön tekerlek daha büyük bir açı ile dönmek zorundadır. Ön tekerleklerin birbirinden
farklı açılarda dönmeleri ayarlanamazlar ise dönüşlerde lastikler yuvarlanmanın yanı sıra yola
sürtünerek kaymak durumunda kalırlar. Bu olayda lastiklerin çabuk aşınmasına yol açar.
2.4.Parça kesit resimleri
Şekil 10 Üst salıncak ölçüleri Şekil 11 Alt salıncak ölçüleri
Şekil 12 Montaj ölçüleri
Page 21
12
Şekil 13 Kesit resmi
Şekil 14 Montaj resmi
Page 22
13
BÖLÜM ÜÇ
3 BOYUTLU DENKLEMLER 3.1 Konum denklemleri
1 1 1 1 1 1 1 1 1 1cos( ) sin( ) sin( ) x y zr r i r j r k r i r j r k
2 2 2 2 2 2 2 2 2 2cos( ) sin( ) sin( ) x y zr r i r j r k r i r j r k
Şekil 15 Alt salıncak konum vektörlerinin tanımlanması
3 3 3 3 3 3 3 3 3cos( ) sin( ) sin( ) x y zr i r j r k r i r j r k
Page 23
14
Şekil 16 Akson konum vektörlerinin tanımlanması
5 5 5 5 5 5 5 5 5cos( ) sin( ) sin( ) x y zr i r j r k r i r j r k
6 6 6 6 6 6 6 6 6cos( ) sin( ) sin( ) x y zr i r j r k r i r j r k
Şekil 17 Üst salıncak konum vektörlerinin tanımlanması
Page 24
15
3.2.Hız denklemleri
Konum vektörlerinin 1.derece türevi hız vektörünü verir.
dr
rdt
(Her bir vektör için ayrı ayrı zamana göre türev alınırsa aşağıdaki denklemler yazılabilir.)
1 1 1 1 1 1 1 1 1 11 sin( ) cos( )
x yr xr x i xr x j k x r i k x r j
2 2 2 2 2 2 2 2 2 22 sin( ) cos( )
x yr xr x i xr x j k x r i k x r j
Şekil 18 Alt salıncak hız vektörleri gösterimi
3 3 3 3 3 3 3 3 3 33 sin( ) cos( )
x yr xr x i xr x j k x r i k x r j
Şekil 19 Akson hız vektörleri gösterimi
Page 25
16
5 5 5 5 5 5 5 5 5 5 55 sin( ) cos( )
x yr xr x i xr x x j k x r i k x r j
6 6 6 6 6 6 6 6 6 66 sin( ) cos( )
x yr xr x i xr x j k x r i k x r j
Şekil 20 Üst salıncak hız vektörleri gösterimi
3.3.İvme denklemleri
d r
rdt
(Her bir vektör için ayrı ayrı zaman göre türev alınırsa aşağıdaki denklemler yazılabilir.)
2 2
1 1 1 1 1 1 1 1 1 1 1 11 [ ( ) sin( )] [ sin( ) sin( )]
r r x xcos r x x i r x x r x x j
2 2
2 2 2 2 2 2 2 2 2 2 2 22 [ ( ) sin( )] [ sin( ) sin( )]
r r x xcos r x x i r x x r x x j
Page 26
17
Şekil 21 Alt salıncak ivme vektörleri gösterimi
2 2
3 3 3 3 3 3 3 3 3 3 3 33 [ ( ) sin( )] [ sin( ) sin( )]
r r x xcos r x x i r x x r x x j
Şekil 22 Akson ivme vektörleri gösterimi
2 2
5 5 5 5 5 5 5 5 5 5 5 55 [ ( ) sin( )] [ sin( ) sin( )]
r r x xcos r x x i r x x r x x j
Page 27
18
2 2
1 6 6 6 6 6 6 6 6 6 6 66 [ ( ) sin( )] [ sin( ) sin( )]
r r x xcos r x x i r x x r x x j
Şekil 23 Üst salıncak ivme vektörleri gösterimi
3.4.Atalet ivme denklemleri
2 21 1 1 11 1 1 1 1 1 1 1 1
2 1 11 1 1 1 1
2 1 11 1 1 1 1
cos( ) sin( ) sin( ) cos( )2 2 2 2
cos( ) sin( )2 2
sin( ) cos( )2 2
x
y
r r r ra i j i j
r ra
r ra
2 22 2 2 22 2 2 2 2 2 2 2 2
2 2 22 2 2 2 2
2 2 22 2 2 2 2
cos( ) sin( ) sin( ) cos( )2 2 2 2
cos( ) sin( )2 2
sin( ) cos( )2 2
x
y
r r r ra i j i j
r ra
r ra
2 2 1 13 1 1 1 1 1 1 1 1 1 1
2 23 3 3 33 3 3 3 3 3 3 3
2 2 3 313 1 1 1 1 1 3 3 3 3
2 13 1 1 1 1
cos( ) sin( ) sin( ) cos( )2 2
cos( ) sin( ) sin( ) cos( )2 2 2 2
cos( ) sin( ) cos( ) sin( )2 2 2
sin( ) cos2
x
y
r ra r i r j i j
r r r ri j i j
r rra r
ra r
2 3 31 3 3 3 3( ) sin( ) cos( )
2 2
r r
Page 28
19
2 25 5 5 55 5 5 5 5 5 5 5 5
2 5 55 5 5 5 5
2 5 55 5 5 5 5
2 26 6 6 66 6 6 6 6 6 6 6 6
2 66 6
cos( ) sin( ) sin( ) cos( )2 2 2 2
cos( ) sin( )2 2
sin( ) cos( )2 2
cos( ) sin( ) sin( ) cos( )2 2 2 2
cos(2
x
y
x
r r r ra i j i j
r ra
r ra
r r r ra i j i j
ra
66 6 6
2 6 66 6 6 6 6
) sin( )2
sin( ) cos( )2 2
y
r
r ra
3.5.Kuvvet denklemleri ve Serbest Cisim Diyagramı
3.5.1.Altsalıncak Kuvvet denklemleri ve Serbest Cisim Diyagramı
Şekil 24 Alt salıncak kuvvet vektörleri ve SCD
1 3 1
2 3 2
1 2 3
0 0 0
/ 2
/ 2
x y z
x x x a x
x x x a x
z z z
F F F
F F R F
F F R F
F F F
1 3 1 2
2 3 2 2
* / 2
* / 2
y y y a y
y y y a y
F F R m g F
F F R m g F
Page 29
20
1 1 1 1 1 1 1 1 1 1 1 1 1 1
2 2 2 2 2 2 2 2 2 2 2 2 2 2
0 0, 0, 0
( ) [( )] ( ) [ ( * ) ] 0
( ) [( )] ( ) [ ( * ) ] 0
x y z
x y z x y z x y z a x a y a z s
x y z x y z x y z a x a y a z s
M M M M
r i r j r k x F i F j F k r i r j r k x F i F m g j F k T T
r i r j r k x F i F j F k r i r j r k x F i F m g j F k T T
3.5.2.Akson Kuvvet denklemleri ve Serbest Cisim Diyagramı
Şekil 25 Akson kuvvet vektörleri ve SCD
3 4 3
3 4 3 3
3 4
0 0 0
*
0
x y z
x x x y a y
y y y a y x
z z
F F F
F F R F F
F F R m g F F
F F
1 1 1 1 1 1 1 1 1 1 1 1 1 1
0 0, 0, 0
( ) [( )] ( ) [ ( * ) ] 0
x y z
x y z x y z x y z a x a y a z s
M M M M
r i r j r k x F i F j F k r i r j r k x F i F m g j F k T T
Page 30
21
3.5.3.Üst salıncak Kuvvet denklemleri ve Serbest Cisim Diyagramı
Şekil 26 Üst salıncak kuvvet vektörleri ve SCD
5 4 5
5 4 5 5
0 0 0
*
x y z
x x a x
y y a y
F F F
F F F
F F F m g
6 4 6
6 4 6 6
5 6 4
0 0 0
*
x y z
x x a x
y y a y
z z z
F F F
F F F
F F F m g
F F F
55 55 5 5 4 4 4 5 5 5 5
5
66 66 6 6 4 4 4 6 6 6 6
6
0 0, 0, 0
( ) [( )] ( ) [ ( * ) ]2 2 2
0
( ) [( )] ( ) [ ( * ) ]2 2 2
0
x y z
yx zx y z x y z a x a y a z
yx zx y z x y z a x a y a z
M M M M
rr rr i r j r k x F i F j F k i j k x F i F m g j F k
T
rr rr i r j r k x F i F j F k i j k x F i F m g j F k
T
Page 31
22
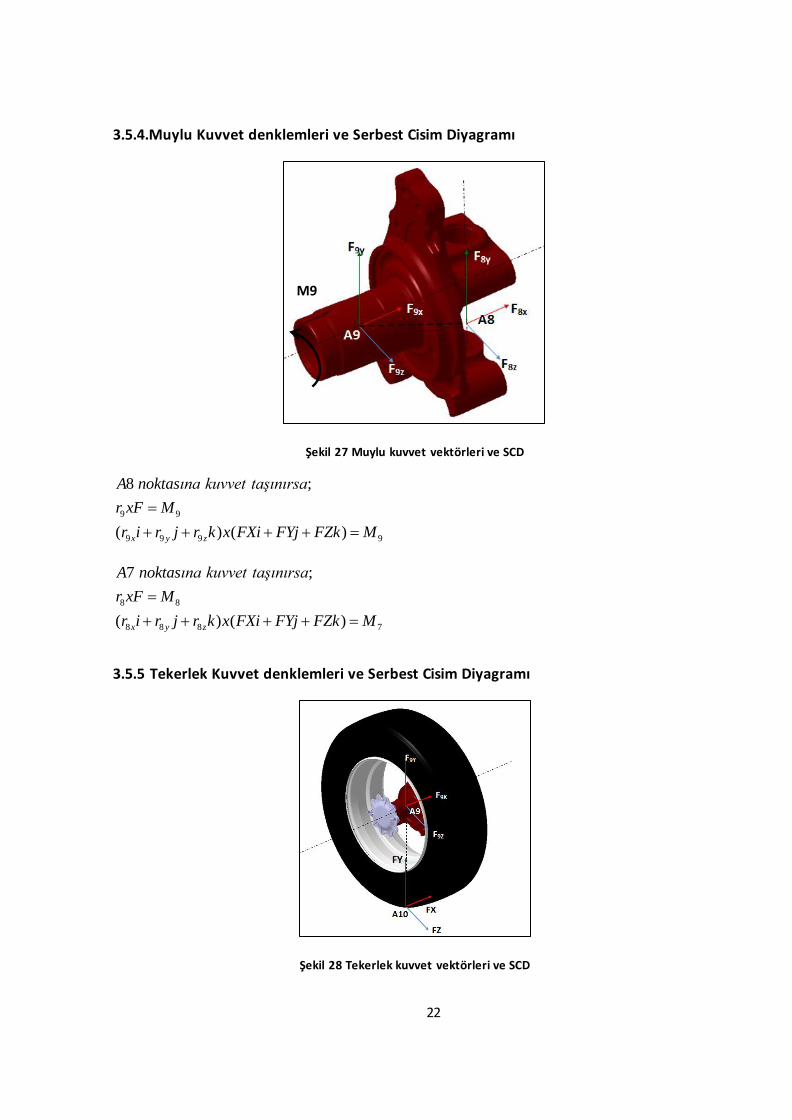
3.5.4.Muylu Kuvvet denklemleri ve Serbest Cisim Diyagramı
Şekil 27 Muylu kuvvet vektörleri ve SCD
9 9
9 9 9 9
8 ;
( ) ( )
x y z
A noktasına kuvvet taşınırsa
r xF M
r i r j r k x FXi FYj FZk M
8 8
8 8 8 7
7 ;
( ) ( )
x y z
A noktasına kuvvet taşınırsa
r xF M
r i r j r k x FXi FYj FZk M
3.5.5 Tekerlek Kuvvet denklemleri ve Serbest Cisim Diyagramı
Şekil 28 Tekerlek kuvvet vektörleri ve SCD
M9
Page 32
23
10 10
10 10 10 10
9
( ) ( )
x y z
A noktasındaki kuvvet ve moment dengesi
r xF M
r i r j r k x FXi FYj FZk M
3.5.6.Kuvvet denklemleri
1 3 1
2 3 2
1 2 3
/ 2
/ 2
x x x a x
x x x a x
z z z
F F R F
F F R F
F F F
1 3 1 2
2 3 2 2
* / 2
* / 2
y y y a y
y y y a y
F F R m g F
F F R m g F
1 1 1 1 1 1 1 1 1 1 1 1 1
1
2 2 2 2 2 2 2 2 2 2 2 2 2
2
( ) [( )] ( ) [ ( * ) ]
0
( ) [( )] ( ) [ ( * ) ]
0
x y z x y z x y z a x a y a z
s
x y z x y z x y z a x a y a z
s
r i r j r k x F i F j F k r i r j r k x F i F m g j F k
T T
r i r j r k x F i F j F k r i r j r k x F i F m g j F k
T T
3 4 3
3 4 3 3
3 4
*
0
x x x y a y
y y y a y x
z z
F F R F F
F F R m g F F
F F
1 1 1 1 1 1 1 1 1 1 1 1 1 1( ) [( )] ( ) [ ( * ) ] 0 x y z x y z x y z a x a y a z sr i r j r k x F i F j F k r i r j r k x F i F m g j F k T T
5 4 5
5 4 5 5 *
x x a x
y y a y
F F F
F F F m g
6 4 6
6 4 6 6
5 6 4
*
x x a x
y y a y
z z z
F F F
F F F m g
F F F
55 5
5 5 5 4 4 4 5 5 5 5
5
66 66 6 6 4 4 4 6 6 6 6
6
( ) [( )] ( ) [ ( * ) ]2 2 2
0
( ) [( )] ( ) [ ( * ) ]2 2 2
0
yx zx y z x y z a x a y a z
yx zx y z x y z a x a y a z
rr rr i r j r k x F i F j F k i j k x F i F m g j F k
T
rr rr i r j r k x F i F j F k i j k x F i F m g j F k
T
Page 33
24
BÖLÜM DÖRT
MATLAB PROGRAMI
4.1.Giriş
Matlab programına tanımlanmış noktalar için oluşturulmuş 3 boyutlu parçaların montajıdır.
Montajda her noktanın referans koordinat eksenine konum koordinatları oluşturulur. Bu
montaj catia programı nokta kumpasla tanımlanan noktaların koordinatlarını veriyor.Bu
koordinatlar daha sonra matlab programında “KOORDİNATLAR” kısmına girilir.
Şekil 29 Catia montaj koordinatları
4.2 Matlab programı clc;clear; disp('...............BOYUTLAR................') %DEĞĠġKENLERĠN TANIMLANMASI %w1 w2 w3 w5 w6 [açısal hız değiĢkenleri] %F1x F1y F1z F2x F2y F2z F3x F3y F3z F5x F5y F5z F6x F6y F6z [ Bağ
kuvvetleri değiĢkenleri] %a2y a2x a3y a3x a4x a4y [ivme değiĢkenleri] syms w1 w2 w3 w5 w6 F1x F1y F1z F2x F2y F2z F3x F3y F3z F5x F5y F5z F6x
F6y F6z Rx Ry Ts a2y a2x a3y a3x ; %KÜTLELERĠN VE YER ÇEKĠMĠNĠN TANIMLANMASI [kg][m/s^2] m1=14;m2=14;m3=36;m5=6;m6=6; g=-9.81;
Page 34
25
%NOKTA KOORDĠNATLARININ TANIMLANMASI a0=[0 0 0 ]; %REFERANS EKSEN a1=[-83 0 542.113]; %A1 NOKTASI KOORDĠNATI a2=[-83 0 30.988]; %A2 NOKTASI KOORDĠNATI a3=[-753.308 -70.452 -8.689]; %A3 NOKTASI KOORDĠNATI a4=[-813.161 390.246 -8.689]; %A4 NOKTASI KOORDĠNATI a5=[-531.014 448.014 219.638]; %A5 NOKTASI KOORDĠNATI a6=[-531.014 448.014 -171.712]; %A6 NOKTASI KOORDĠNATI
a7=[-780.337 137.595 16.288]; %A7 NOKTASI KOORDĠNATI a8=[-953.779 156.803 16.288]; %A8 NOKTASI KOORDĠNATI a9=[-1108.4 159.581 -8.689]; %A9 NOKTASI KOORDĠNATI a10=[-1113.4 -306.926 -29.058]; %A10 NOKTASI KOORDĠNATI aa=[-650.785 -61.83 6.789]; %AMORTĠSÖR BAĞLANTI KOORDĠNATI
disp('......................GĠRDĠLER...............') %AÇISAL HIZ VE ĠVMENĠN GĠRĠLMESĠ [BAġLANGIÇ ġARTI] zz=(a10(2)-a1(2))/1000; t=0.001;%çok küçük bir zaman dilimi kabul edildi w1=-zz/t;% saatin tersi yönü için w1=1 rad/s değeri de girilebilir. alfa1=-zz/t^2 % saatin tersi yönü için alfa1=10 rad/s^2 değeri de
girilebilir.
%AMORTĠSÖR KUVVET GĠRDĠLERĠ R=[5000 5000 0]; Rx=R(1);%Amortisörün x yönündeki bileĢeni Ry=R(2);%Amortisörün y yönündeki bileĢeni Rz=R(3);%Amortisörün z yönündeki bileĢeni %ZEMĠNDEN GELEN KUVVETLER F=[0 10000 0]; FX=F(1);%BĠLEġENLERĠNE X AYIRILMASI FY=F(2);%BĠLEġENLERĠNE Y AYIRILMASI FZ=F(3);%BĠLEġENLERĠNE Z AYIRILMASI
%KONUM VEKTÖRLERĠNĠN TANIMLAMASI r1=a3-a1;%A3 NOKTASINDAN A1 NOKTASINA KONUM VEKTÖRÜ r2=a3-a2;%A3 NOKTASINDAN A2 NOKTASINA KONUM VEKTÖRÜ r3=a4-a3;%A4 NOKTASINDAN A3 NOKTASINA KONUM VEKTÖRÜ r5=a4-a5;%A4 NOKTASINDAN A5 NOKTASINA KONUM VEKTÖRÜ r6=a4-a6;%A4 NOKTASINDAN A6 NOKTASINA KONUM VEKTÖRÜ
%KONUM VEKTÖRLERĠ BĠLEġENLERĠNE AYIRILMASI %UZUNLUKLAR [m]HALĠNE ÇEVĠRĠLĠYOR. r1x=(r1(1)/1000); r1y=(r1(2)/1000); r1z=(r1(3)/1000); r2x=(r2(1)/1000); r2y=(r2(2)/1000); r2z=(r2(3)/1000); r3x=(r3(1)/1000); r3y=(r3(2)/1000); r3z=(r3(3)/1000); r5x=(r5(1)/1000); r5y=(r5(2)/1000); r5z=(r5(3)/1000); r6x=(r6(1)/1000);
Page 35
26
r6y=(r6(2)/1000);
r6z=(r6(3)/1000);
%AÇISAL HIZLARIN BULUNMASI [rad/s]
%..........................HIZ MATRĠSĠ..................... hiz=[-r3y r5y;r3x -r5x];%1. KOL ÜZERĠNDEN YAZILMIġ MATRĠS b=[w1*r1y;-w1*r1x]; inv(hiz)*b; disp('.....................w2,w3,w5,w6 [rad/s]............')
w2=w1 w3=ans(1) w5=ans(2) hiz2=[-r3y r6y;r3x -r6x];%2. KOL ÜZERĠNDEN YAZILMIġ MATRĠS b=[w1*r2y;-w1*r2x]; inv(hiz2)*b; w6=ans(2);
%AÇISAL ĠVMELERĠN BULUNMASI [rad/s^2] %.........................ĠVME MATRĠSĠ....................... ivme=[-r3y r5y;r3x -r5x]; c=[alfa1*r1y+w1^2*r1x+w3^2*r3x-w5^2*r5x; -alfa1*r1x+w1^2*r1y+r3y*w3^2-r5y*w5^2]; inv(ivme)*c; disp('...................alfa2,alfa3,alfa5,alfa6 [rad/s^2].......') %AÇISAL HIZLARIN HESAPLANMASI alfa2=alfa1 alfa3=ans(1) alfa5=ans(2) alfa6=alfa5
%ATALET ĠVMELERĠN BULUNMASI disp('...................a1 a2 a3 a5 a6 ATALET ĠVMELERĠ [m/s^2].......') a1x=-w1^2*r1x/2-alfa1*r1y/2; a1y=-w1^2*r1y/2+alfa1*r1x/2; a2x=a1x; a2y=a1y; a3x=-w1^2*r1x-alfa1*r1y-w3^2*r3x/2-alfa3*r3y/2; a3y=-w1^2*r1y+alfa1*r1x-w3^2*r3y/2+alfa3*r3x/2; a5x=-w5^2*r5x/2-alfa5*r5y/2; a5y=-w5^2*r5y/2+alfa5*r5x/2; a6x=a5x; a6y=a5y;
%ATALET KUVVETLERĠN HESAPLANMASI Fa1x=-m1*a1x; Fa1y=-m1*a1y; Fa1z=0; Fa2x=-m2*a2x; Fa2y=-m2*a2y; Fa2z=0; Fa3x=-m3*a3x; Fa3y=-m3*a3y; Fa3z=0; Fa5x=-m5*a5x; Fa5y=-m5*a5y; Fa5z=0;
Page 36
27
Fa6x=-m6*a6x;
Fa6y=-m6*a6y; Fa6z=0; %KOL UZUNLUKLARININ HESAPLANMASI L1=sqrt((a3(1)-a1(1))^2+((a3(2)-a1(2))^2)+((a3(3)-a1(3))^2))/1000; L2=sqrt((a3(1)-a2(1))^2+((a3(2)-a2(2))^2)+((a3(3)-a2(3))^2))/1000; L3=sqrt((a4(1)-a3(1))^2+((a4(2)-a3(2))^2)+((a4(3)-a3(3))^2))/1000; L5=sqrt((a5(1)-a4(1))^2+((a5(2)-a4(2))^2)+((a5(3)-a4(3))^2))/1000; L6=sqrt((a6(1)-a4(1))^2+((a6(2)-a4(2))^2)+((a6(3)-a4(3))^2))/1000;
%ATALET MOMENTLERĠNĠN HESAPLANAMSI
I1=1/2*m1*L1^2; I2=1/2*m2*L2^2; I3=1/2*m3*L3^2; I5=1/2*m5*L5^2; I6=1/2*m6*L6^2;
%ATALET TORKUNUN HESAPLANMASI T1=-I1*alfa1*2; T2=-I1*alfa2*2; T3=-I3*alfa3; T5=-I5*alfa5*2; T6=-I6*alfa6*2;
%MOMENT VEKTÖRLERĠ TANIMLANMASI %" R " KONUM VEKTÖRÜ OLARAK TANIMLANMIġTIR. %A9 NOKTASINDAN A7 NOKTASINA TAġINMASI R7=a9-a7; %AMORTĠSÖR VEKTÖRÜNÜN A3 NOKTASINA TAġINMASI Ra=aa-a3; Rax=abs(Ra(1))/1000; Ray=abs(Ra(2))/1000; %.............................................. %A1 NOKTASINDAN A3 NOKTASINA KONUM VEKTÖRÜ R1=a1-a3; %A4 NOKTASINDAN A3 NOKTASINA KONUM VEKTÖRÜ R3=a4-a3; %A4 NOKTASINDAN A5 NOKTASINA KONUM VEKTÖRÜ R5=a4-a5; %KONUM VEKTÖRLERĠNĠN BĠLEġENLERĠNE AYRILMASI R1x=abs(R1(1))/1000; R1y=abs(R1(2))/1000; R1z=abs(R1(3))/1000;
R3x=abs(R3(1))/1000; R3y=abs(R3(2))/1000; R3z=abs(R3(3))/1000;
R5x=abs(R5(1))/1000; R5y=abs(R5(2))/1000; R5z=abs(R5(3))/1000;
%AMORTĠSÖR KEVVETĠNĠN A3 NOKTASINA TAġINAN MOMENTĠ TR3=Rax*Ry-Ray*Rx; disp('.....................................................................
....')
Page 37
28
%A10 NOKTASINDAN A9 NOKTASINA KONUM VEKTÖRÜ VE MOMENTĠ TANIMLANMASI R10=(a10-a9)/1000;%KONUM VEKTÖRÜ M10=cross(R10,F);%CROSS KOMUTUYLA VEKTÖREL ÇARPIM YAPILMASI M10X=M10(1); M10Y=M10(2) M10Z=M10(3);
%A9 NOKTASINDAN A8 NOKTASINA KONUM VEKTÖRÜ VE MOMENTĠ TANIMLANMASI R9=(a9-a8)/1000;%KONUM VEKTÖRÜ M9=cross(R9,F);%CROSS KOMUTUYLA VEKTÖREL ÇARPIM YAPILMASI M9X=M9(1); M9Y=M9(2) M9Z=M9(3);
%A8 NOKTASINDAN A7 NOKTASINA KONUM VEKTÖRÜ VE MOMENTĠ TANIMLANMASI R8=(a8-a7)/1000;%KONUM VEKTÖRÜ M8=cross(R8,F);%CROSS KOMUTUYLA VEKTÖREL ÇARPIM YAPILMASI M8X=M8(1); M8Y=M8(2); M8Z=M8(3); %A7 NOKTASINDAN A3 NOKTASINA KONUM VEKTÖRÜ VE MOMENTĠ TANIMLANMASI R3=(a7-a3)/1000;%KONUM VEKTÖRÜ M3=cross(R3,F);%CROSS KOMUTUYLA VEKTÖREL ÇARPIM YAPILMASI M3X=M3(1); M3Y=M3(2); M3Z=M3(3); %A3 NOKTASINA ĠNDĠRGENEN MOMENTĠN TOPLANMASI MTX=M8X+M9X+M10X+M3X; MTY=M8Y+M9Y+M10Y+M3Y; MTZ=M8Z+M9Z+M10Z+M3Z; %DĠREKSĠYON DÖNDÜRME MOMENTĠ Mu=(M9Y+M10Y)*cos(8*pi/180);%[8 DERECE PĠM AÇISI] A8 NOKTASINDAKĠ
ĠNDĠRGENMĠġ TOPLAM MOMENT %MANĠVELA KOLUNA GELEN KUVVET ru=0.312;%MANĠVELA KOLU UZUNLUĞU Fu=Mu/ru;%KUVVETĠN HESAPLANMASI
%KUVVET MATRĠSĠ(KONUM VEKTÖRLERĠ) R=[1 0 1 0 0 0 0 0 0; 0 1 0 1 0 0 0 0 0; (-r1y) r1x 0 0 0 0 0 0 1; 0 0 1 0 1 0 0 0 0; 0 0 0 1 0 1 0 0 0; 0 0 0 0 -r3y r3x 0 0 0; 0 0 0 0 1 0 1 0 0; 0 0 0 0 0 1 0 1 0; 0 0 0 0 0 0 (-r5y) r5x 0]; %KUVVET VE MOMENT DENKLMLERĠ F=[(-Fa1x-FY); (-m1*g-Fa1y-FX); -T1-r1x*(Fa1y+m1*g)/2+r1y/2*Fa1x; (-FX-Fa3x-Rx); (-FY-m3*g-Fa3y-Ry);
Page 38
29
(MTZ-TR3-T3-r3x/2*(Fa3y+m3*g)+r3y/2*Fa3x);
(-Fa5x); (-m5*g-Fa5y); -T5-r5x*(Fa5y+m5*g)/2+r5y/2*Fa5x];
inv(R)*F;%[iġLEMĠN ÇÖZÜMÜ]
%A5 VE A4 NOKTASI X-Y DÜZLEMĠNDEKĠ KONUM VEKTÖRLERĠ UZUNLUĞU rc=sqrt((a5(1)-a4(1))^2+((a5(2)-a4(2))^2))/1000;
%A5 VE A6 NOKTASININ Z YÖNÜNDEKĠ KONUM VEKTÖRÜ UZUNLUĞU z56=sqrt((a5(3)-a6(3))^2)/1000;
%A3 VE A1 NOKTASININ X-Y DÜZLEMĠNDEKĠ KONUM VEKTÖRÜ UZUNLUĞU ra=sqrt((a3(1)-a1(1))^2+((a3(2)-a1(2))^2))/1000;
%A1 VE A2 NOKTASININ Z YÖNÜNDEKĠ KONUM VEKTÖRÜ UZUNLUĞU z12=sqrt((a2(3)-a1(3))^2)/1000;
%A3 DEN A1 MOMENT KOLU rb=(abs(abs(a3(3))-abs((a1(3)+a2(3))/2)))/1000;
%O1 NOKTASINA GÖRE A1 VE A2 NOKTALARININ UZUNLUĞU z1=sqrt((a3(3)-a1(3))^2)/1000; z2=sqrt((a3(3)-a2(3))^2)/1000;
%SONUÇLARIN SIRALI ÇIKMASI ĠÇĠN DEĞĠġKENLER SIRALANIYOR. Ax=ans(1); Ay=ans(2); F3z=-0.5*FZ; %Z YÖNÜNDEKĠ TOPLAM MOMENT DEĞERĠ MTZ=M8Z+M9Z+M10Z+M3Z; %FREN SIRASINDA OLUġAN EĞĠLME MOMENTĠ F4z=-0.5*FZ; M=F4z*rc; %SONUÇLAR HESAPLANMASI F1x=Ax*z2/z1+F3z*ra/z12 % O1 NOKTASI GELEN KUVVETĠN DAĞITILMASI F1y=Ay*z2/z1 % O1 NOKTASI GELEN KUVVETĠN DAĞITILMASI F1z=F3z/2 F2x=Ax*(z1-z2)/z1-F3z*ra/z12 F2y=Ay*(z1-z2)/z1 F2z=F3z/2 F3x =ans(3) F3y =ans(4) F3z=-0.5*FZ F4x =ans(5) F4y =ans(6) F4z=0.5*FZ F5x=ans(7)/2+M/z56 F5y=ans(8)/2 F5z=-F4z/2 F6x=ans(7)/2-F4z/2*rc/z56 F6y =ans(8)/2 F6z=-F4z/2 %ZAMAN DEĞERĠNĠN ATANMASI x=0:0.0001:0.01; % A1 NOKTASINA GELEN MAFSAL KUVVETĠ GRAFĠKSEL GÖSTERĠMĠ figure(1)=subplot(3,4,1);plot(x,F1x,'R.');
Page 39
30
title(' A1 mafsalı gösterimi');
xlabel('Zaman[t]'); ylabel('Kuvvet değeri[N]'); Grid on hold on,figure(1)=subplot(3,4,1);plot(x,F1y,'G.'); title(' A1 mafsalı gösterimi'); xlabel('Zaman[t]'); ylabel('Kuvvet değeri[N]'); hold on,figure(1)=subplot(3,4,1);plot(x,F1z,'B.'); title(' A1 mafsalı gösterimi'); xlabel('Zaman[t]');
ylabel('Kuvvet değeri[N]'); % A2 NOKTASINA GELEN MAFSAL KUVVETĠ GRAFĠKSEL GÖSTERĠMĠ figure(1)=subplot(3,4,2);plot(x,F2x,'R.'); title(' A2 mafsalı gösterimi'); xlabel('Zaman[t]'); ylabel('Kuvvet değeri[N]'); Grid on hold on,figure(1)=subplot(3,4,2);plot(x,F2y,'G.'); title(' A2 mafsalı gösterimi'); xlabel('Zaman[t]');
ylabel('Kuvvet değeri[N]'); hold on,figure(1)=subplot(3,4,2);plot(x,F2z,'B.'); title(' A2 mafsalı gösterimi'); xlabel('Zaman[t]'); ylabel('Kuvvet değeri[N]'); % A3 NOKTASINA GELEN MAFSAL KUVVETĠ GRAFĠKSEL GÖSTERĠMĠ figure(1)=subplot(3,4,3);plot(x,F3x,'R.'); title(' A3 mafsalı gösterimi'); xlabel('Zaman[t]'); ylabel('Kuvvet değeri[N]'); Grid on hold on,figure(1)=subplot(3,4,3);plot(x,F3y,'G.'); title(' A3 mafsalı gösterimi'); xlabel('Zaman[t]'); ylabel('Kuvvet değeri[N]'); hold on,figure(1)=subplot(3,4,3);plot(x,F3z,'B.'); title(' A3 mafsalı gösterimi'); xlabel('Zaman[t]'); ylabel('Kuvvet değeri[N]'); % A4 NOKTASINA GELEN MAFSAL KUVVETĠ GRAFĠKSEL GÖSTERĠMĠ figure(1)=subplot(3,4,4);plot(x,F4x,'R.'); title(' A4 mafsalı gösterimi'); xlabel('Zaman[t]'); ylabel('Kuvvet değeri[N]'); Grid on hold on,figure(1)=subplot(3,4,4);plot(x,F4y,'G.'); title(' A4 mafsalı gösterimi'); xlabel('Zaman[t]');
ylabel('Kuvvet değeri[N]'); hold on,figure(1)=subplot(3,4,4);plot(x,F4z,'B.'); title(' A4 mafsalı gösterimi'); xlabel('Zaman[t]'); ylabel('Kuvvet değeri[N]'); % A5 NOKTASINA GELEN MAFSAL KUVVETĠ GRAFĠKSEL GÖSTERĠMĠ figure(1)=subplot(3,4,5);plot(x,F5x,'R.'); title(' A5 mafsalı gösterimi'); xlabel('Zaman[t]'); ylabel('Kuvvet değeri[N]');
Page 40
31
Grid on
hold on,figure(1)=subplot(3,4,5);plot(x,F5y,'G.'); title(' A5 mafsalı gösterimi'); xlabel('Zaman[t]'); ylabel('Kuvvet değeri[N]'); hold on,figure(1)=subplot(3,4,5);plot(x,F5z,'B.'); title(' A5 mafsalı gösterimi'); xlabel('Zaman[t]'); ylabel('Kuvvet değeri[N]'); % A6 NOKTASINA GELEN MAFSAL KUVVETĠ GRAFĠKSEL GÖSTERĠMĠ Grid on
figure(1)=subplot(3,4,6);plot(x,F6x,'R.'); title(' A6 mafsalı gösterimi'); xlabel('Zaman[t]'); ylabel('Kuvvet değeri[N]'); Grid on hold on,figure(1)=subplot(3,4,6);plot(x,F6y,'G.'); title(' A6 mafsalı gösterimi'); xlabel('Zaman[t]'); ylabel('Kuvvet değeri[N]'); Grid on
hold on,figure(1)=subplot(3,4,6);plot(x,F6z,'B.'); title(' A6 mafsalı gösterimi'); xlabel('Zaman[t]'); ylabel('Kuvvet değeri[N]'); %AÇISAL HIZ DEĞERLERĠ Grid on hold on,figure(1)=subplot(3,4,7);plot(x,w1,'R.'); title(' Açısal hız gösterimi'); xlabel('w1=KIRMIZI w3=YEġĠL w5=MAVĠ'); ylabel('Kuvvet değeri[rad/s]'); Grid on hold on,figure(1)=subplot(3,4,7);plot(x,w3,'G.'); title(' Açısal hız gösterimi'); xlabel('w1=KIRMIZI w3=YEġĠL w5=MAVĠ'); ylabel('Kuvvet değeri[rad/s]'); hold on,figure(1)=subplot(3,4,7);plot(x,w5,'B.'); title(' Açısal hız gösterimi'); xlabel('w1=KIRMIZI w3=YEġĠL w5=MAVĠ'); ylabel('Kuvvet değeri[rad/s]'); %AÇISAL ĠVME DEĞERLERĠ Grid on hold on,figure(1)=subplot(3,4,8);plot(x,alfa1,'R.'); title(' Açısal Ġvme gösterimi'); xlabel('ALFA1=KIRMIZI ALFA3=YEġĠL ALFA5=MAVĠ'); ylabel('Kuvvet değeri[rad/s^2]'); Grid on hold on,figure(1)=subplot(3,4,8);plot(x,alfa3,'G.'); title(' Açısal Ġvme gösterimi');
xlabel('ALFA1=KIRMIZI ALFA3=YEġĠL ALFA5=MAVĠ'); ylabel('Kuvvet değeri[rad/s^2]'); Grid on hold on,figure(1)=subplot(3,4,8);plot(x,alfa5,'B.'); title(' Açısal Ġvme gösterimi'); xlabel('ALFA1=KIRMIZI ALFA3=YEġĠL ALFA5=MAVĠ'); ylabel('Kuvvet değeri[rad/s^2]'); h = msgbox('KIRMIZI=X YÖNÜNDE
YESIL=Y YÖNÜNDE
MAVI=Z YÖNÜNDE') ;
Page 41
32
Şekil 30 Zeminden gelen kuvvetlerin mafsallara iletilirken izlediği yol
Şekil 31 Hız matrisi
Page 42
33
Şekil 32 İvme matrisi
Şekil 33 Kuvvet matrisi
Page 43
34
BÖLÜM BEŞ
KİNEMATİK BÜYÜKLÜKLERİN KONTROLÜ
1 için
Verilen değerler :
1 [rad/s] hesaplama yapılırsa;
1 1 1 1 1 1 1 1 1 1
2 2 2 2 2 2 2 2 2 2
1 sin( ) cos( ) =
1 ( 753,308 83) 1 ( 70,452 0) 670,308 70,452
2 sin( ) cos( ) =
1 ( 753,308 83) 1
x y
x y
r xr x i xr x j k x r i k x r j
k x i kx j j i
r xr x i xr x j k x r i k x r j
k x i k
( 70,452 0) 670,308 70,452 x j j i
3 3 3 3 3 3 3 3 3 3
3 3 3 3
3 sin( ) cos( ) =
( 813,161 753,308) (390,246 70,452) 59,853 460,698
x yr r x x i r x x j x r i k x r j
k x i k x j j i
5 5 5 5 5 5 5 5 5 5
5 5 5 5
6 6 6 6 6 6 6 6 6 6
6
5 sin( ) cos( ) =
( 813,161 531,014) (390,246 448,014) 282,147 57,768
6 sin( ) cos( ) =
( 813,
x y
x y
r r x x i r x x j k x r i k x r j
k x i k x j j i
r r x x i r x x j k x r i k x r j
k x
6 6 6161 531,014) (390,246 448,014) 282,147 57,768 i k x j j i
1 3 5
r r r
3 3 5 5
3 5
3 5
670,308 70,452 59,853 460,698 282,147 57,768
70,452 460,698 57,768
670,308 59,853 282,147
j i j i j i
i
j
3
5
w =-0,1412 rad/s
w =2,3457 rad/s
2 3 6
r r r
5.1.Hız denklemleri kontrolü
Page 44
35
3 3 6 6
3 6
3 6
670,308 70,452 59,853 460,698 282,147 57,768
70,452 460,698 57,768
670,308 59,853 282,147
j i j i j i
i
j
3
6
ω =-0,1412 rad/s
ω =2,3457 rad/s
5.2.İvme denklemi kontrolü
••2 2
11 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1
•
1 1
1 [ ( ) sin( )] [ sin( ) sin( )] ( )
( ) 1 (1 ( - 670,3080 - 70,520 -550,8020 ) 670,3080 70,4520
10 ( - 670,3080 - 70,520 -550,8
r r x xcos r x x i r x x r x x j x xr xr
x xr kx kx i j k i j
xr kx i j
020 ) k 704,5i -6703,1j
•• •2 2
22 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2
2 2 2
•
2 2
2 [ cos( ) sin( )] [ sin( ) sin( )] ( )
( ) 1 (1 ( - 670,3080 - 70,520 -550,8020 ) 670,3080 70,4520
10 ( - 670,3080 - 70,520 -550,
r r x x r x x i r x x r x x j x xr xr
x xr kx kx i j k i j
xr kx i j
8020 ) k 704,5i -6703,1j
Page 45
36
•• •2 2
33 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3
3 3 3
• •
3 33
3 -[ cos( ) sin( )] [- sin( ) sin( )] ( )
( ) -0,1412 (-0,1412 (-59,8530 460,6980 )) 1,1933 9,185
(-59,8530 460,6980 )
r r x x r x x i r x x r x x j x xr xr
x xr k x k x i j i j
xr k x i j
-
• •
3 3-59,8530ω j-460,6980ω i
•• •2 2
55 5 5 5 5 5 5 5 5 5 5 5 5 5 5 5
5 5 5
• •
5 55
5 [ cos( ) sin( )] [ sin( ) sin( )] ( )
( ) 2,3458 (2,3458 ( - 282,1470 -57,7680 - 228,3270 ))
1552,59 317,884
(-282,147
r r x x r x x i r x x r x x j x xr xr
x xr k x k x i j k
i j
xr k x
+
0 -57,7680 - 228,3270 ) i j k• •
5 5 -282,1470ω j+57,7680ω i
•• •2 2
66 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6
6 6 6
• •
6 66
6 [ cos( ) sin( )] [ sin( ) sin( )] ( )
( ) 2,3458 (2,3458 ( - 282,1470 -57,7680 - 228,3270 )) 1552,59 -317,884
(-282,147
r r x x r x x i r x x r x x j x xr xr
x xr k x k x i j k i j
xr k x
0 -57,7680 - 228,3270 ) i j k• •
6 6 -282,1470ω j+57,7680ω i
•• •• ••
• •
3 5
• •
3 5
• •
3 5
• •
3 5
1 3 5
704,5 670,3080 460,6980 1,1933 57,7680 1552,59
176,5887 460,6980 57,7680
-6703,1 70,4520 -59,8530 9,185 -282,1470 317,884
6959,717 -59,8530 -282,1470
3,056 7,
r r r
i
j
=
• •
3 5
• •
3 5
974
24,666 0,212
• •
2 23 5ω =-3,38 rad/s ω =23,94 rad/s
•• •• ••
•• •• ••
2 3 6
1 3 5
r r r
r r r
Page 46
37
• •
3 6
• •
3 6
• •
3 6
• •
3 6
• •
3 6
704,5 670,3080 460,6980 1,1933 57,7680 1552,59
176,5887 460,6980 57,7680
-6703,1 70,4520 -59,8530 9,185 -282,1470 317,884
6959,717 -59,8530 -282,1470
3,056 7,974
24,6
i
j
=
• •
3 666 0,212 • •
2 23 6ω =-3,38 rad/s ω =23,94 rad/s
5.3.Atalet ivme değerleri
1 nolu uzvun ivme değerleri
2 21 1 1 11 1 1 1 1 1 1 1 1
2 21 11 1 1 1 1
2 21 11 1 1 1 1
cos( ) sin( ) sin( ) cos( )2 2 2 2
cos( ) sin( ) 0,6874 [ / ]2 2
sin( ) cos( ) -3,3163 [ / ]2 2
x
y
r r r ra i j i j
r ra m s
r ra m s
Page 47
38
2 nolu uzvun ivme değeri
2 22 2 2 22 2 1 2 2 2 2 2 2
2 22 22 2 2 2 2
2 22 22 2 2 2 2
cos( ) sin( ) sin( ) cos( )2 2 2 2
cos( ) sin( ) [ / ]2 2
sin( ) cos( ) [ / ]2 2
x
y
r r r ra i j i j
r ra m s
r ra m s
0,6874
-3,3163
3 nolu uzvun ivme değeri
2 2 2 23 2 2 2 2 2 2 2 2 2 2
2 23 3 3 33 3 3 3 3 3 3 3
2 2 23 33 2 2 2 2 2 2 3 3 3 3
2
3 2 2
cos( ) sin( ) sin( ) cos( )2 2
cos( ) sin( ) sin( ) cos( )2 2 2 2
cos( ) sin( ) cos( ) sin( ) [ / ]2 2
s
x
y
r ra r i r j i j
r r r ri j i j
r ra r r m s
a r
2,1554
2 23 32 2 2 2 3 3 3 3in( ) cos( ) sin( ) cos( ) [ / ]
2 2
r rr m s -6,5359
5 nolu uzvun ivme değeri
2 25 5 5 55 5 5 5 5 5 5 5 5
2 25 55 5 5 5 5
2 25 55 5 5 5 5
cos( ) sin( ) sin( ) cos( )2 2 2 2
cos( ) sin( ) [ / ]2 2
sin( ) cos( ) [ / ]2 2
x
y
r r r ra i j i j
r ra m s
r ra m s
1,4680
-3,2196
Page 48
39
6 nolu uzvun ivme değeri
2 26 6 6 66 6 6 6 6 6 6 6 6
2 26 66 6 6 6 6
2 26 66 6 6 6 6
cos( ) sin( ) sin( ) cos( )2 2 2 2
cos( ) sin( ) [ / ]2 2
sin( ) cos( ) [ / ]2 2
x
y
r r r ra i j i j
r ra m s
r ra m s
1,4680
-3,2196
Şekil 34 Matlab çıktısı
Page 49
40
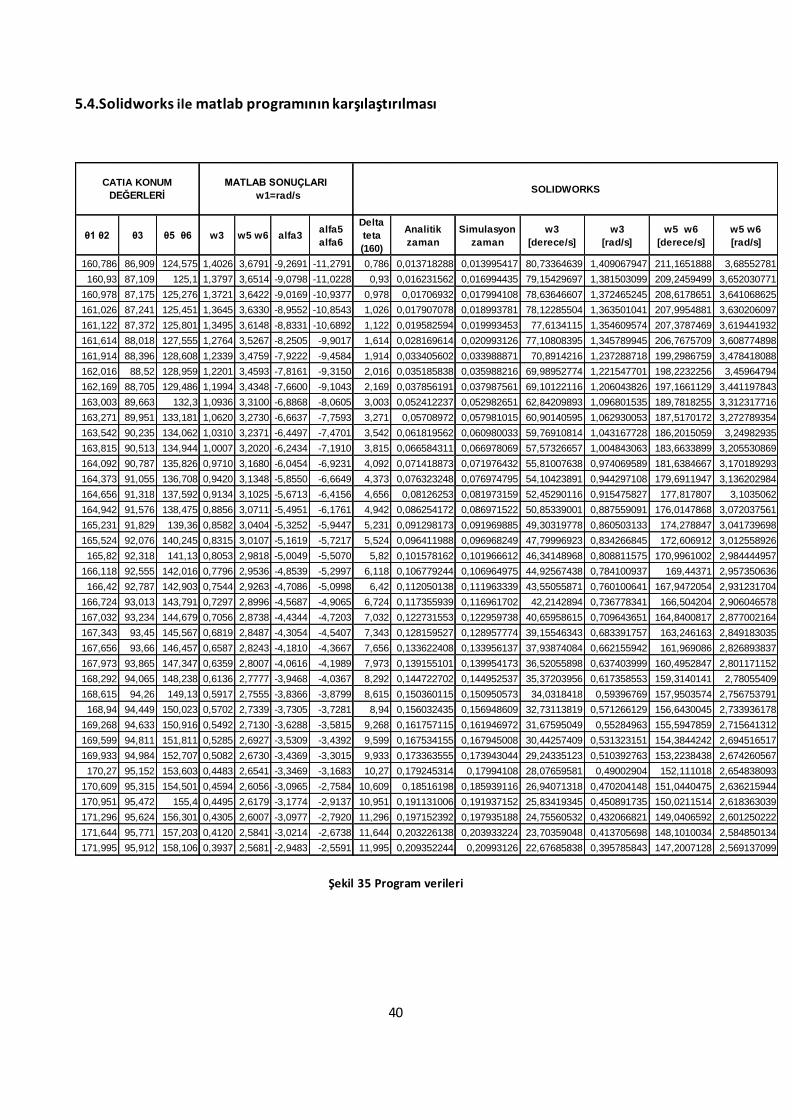
5.4.Solidworks ile matlab programının karşılaştırılması
Şekil 35 Program verileri
θ1 θ2 θ3 θ5 θ6 w3 w5 w6 alfa3alfa5
alfa6
Delta
teta
(160)
Analitik
zaman
Simulasyon
zaman
w3
[derece/s]
w3
[rad/s]
w5 w6
[derece/s]
w5 w6
[rad/s]
160,786 86,909 124,575 1,4026 3,6791 -9,2691 -11,2791 0,786 0,013718288 0,013995417 80,73364639 1,409067947 211,1651888 3,68552781
160,93 87,109 125,1 1,3797 3,6514 -9,0798 -11,0228 0,93 0,016231562 0,016994435 79,15429697 1,381503099 209,2459499 3,652030771
160,978 87,175 125,276 1,3721 3,6422 -9,0169 -10,9377 0,978 0,01706932 0,017994108 78,63646607 1,372465245 208,6178651 3,641068625
161,026 87,241 125,451 1,3645 3,6330 -8,9552 -10,8543 1,026 0,017907078 0,018993781 78,12285504 1,363501041 207,9954881 3,630206097
161,122 87,372 125,801 1,3495 3,6148 -8,8331 -10,6892 1,122 0,019582594 0,019993453 77,6134115 1,354609574 207,3787469 3,619441932
161,614 88,018 127,555 1,2764 3,5267 -8,2505 -9,9017 1,614 0,028169614 0,020993126 77,10808395 1,345789945 206,7675709 3,608774898
161,914 88,396 128,608 1,2339 3,4759 -7,9222 -9,4584 1,914 0,033405602 0,033988871 70,8914216 1,237288718 199,2986759 3,478418088
162,016 88,52 128,959 1,2201 3,4593 -7,8161 -9,3150 2,016 0,035185838 0,035988216 69,98952774 1,221547701 198,2232256 3,45964794
162,169 88,705 129,486 1,1994 3,4348 -7,6600 -9,1043 2,169 0,037856191 0,037987561 69,10122116 1,206043826 197,1661129 3,441197843
163,003 89,663 132,3 1,0936 3,3100 -6,8868 -8,0605 3,003 0,052412237 0,052982651 62,84209893 1,096801535 189,7818255 3,312317716
163,271 89,951 133,181 1,0620 3,2730 -6,6637 -7,7593 3,271 0,05708972 0,057981015 60,90140595 1,062930053 187,5170172 3,272789354
163,542 90,235 134,062 1,0310 3,2371 -6,4497 -7,4701 3,542 0,061819562 0,060980033 59,76910814 1,043167728 186,2015059 3,24982935
163,815 90,513 134,944 1,0007 3,2020 -6,2434 -7,1910 3,815 0,066584311 0,066978069 57,57326657 1,004843063 183,6633899 3,205530869
164,092 90,787 135,826 0,9710 3,1680 -6,0454 -6,9231 4,092 0,071418873 0,071976432 55,81007638 0,974069589 181,6384667 3,170189293
164,373 91,055 136,708 0,9420 3,1348 -5,8550 -6,6649 4,373 0,076323248 0,076974795 54,10423891 0,944297108 179,6911947 3,136202984
164,656 91,318 137,592 0,9134 3,1025 -5,6713 -6,4156 4,656 0,08126253 0,081973159 52,45290116 0,915475827 177,817807 3,1035062
164,942 91,576 138,475 0,8856 3,0711 -5,4951 -6,1761 4,942 0,086254172 0,086971522 50,85339001 0,887559091 176,0147868 3,072037561
165,231 91,829 139,36 0,8582 3,0404 -5,3252 -5,9447 5,231 0,091298173 0,091969885 49,30319778 0,860503133 174,278847 3,041739698
165,524 92,076 140,245 0,8315 3,0107 -5,1619 -5,7217 5,524 0,096411988 0,096968249 47,79996923 0,834266845 172,606912 3,012558926
165,82 92,318 141,13 0,8053 2,9818 -5,0049 -5,5070 5,82 0,101578162 0,101966612 46,34148968 0,808811575 170,9961002 2,984444957
166,118 92,555 142,016 0,7796 2,9536 -4,8539 -5,2997 6,118 0,106779244 0,106964975 44,92567438 0,784100937 169,44371 2,957350636
166,42 92,787 142,903 0,7544 2,9263 -4,7086 -5,0998 6,42 0,112050138 0,111963339 43,55055871 0,760100641 167,9472054 2,931231704
166,724 93,013 143,791 0,7297 2,8996 -4,5687 -4,9065 6,724 0,117355939 0,116961702 42,2142894 0,736778341 166,504204 2,906046578
167,032 93,234 144,679 0,7056 2,8738 -4,4344 -4,7203 7,032 0,122731553 0,122959738 40,65958615 0,709643651 164,8400817 2,877002164
167,343 93,45 145,567 0,6819 2,8487 -4,3054 -4,5407 7,343 0,128159527 0,128957774 39,15546343 0,683391757 163,246163 2,849183035
167,656 93,66 146,457 0,6587 2,8243 -4,1810 -4,3667 7,656 0,133622408 0,133956137 37,93874084 0,662155942 161,969086 2,826893837
167,973 93,865 147,347 0,6359 2,8007 -4,0616 -4,1989 7,973 0,139155101 0,139954173 36,52055898 0,637403999 160,4952847 2,801171152
168,292 94,065 148,238 0,6136 2,7777 -3,9468 -4,0367 8,292 0,144722702 0,144952537 35,37203956 0,617358553 159,3140141 2,78055409
168,615 94,26 149,13 0,5917 2,7555 -3,8366 -3,8799 8,615 0,150360115 0,150950573 34,0318418 0,59396769 157,9503574 2,756753791
168,94 94,449 150,023 0,5702 2,7339 -3,7305 -3,7281 8,94 0,156032435 0,156948609 32,73113819 0,571266129 156,6430045 2,733936178
169,268 94,633 150,916 0,5492 2,7130 -3,6288 -3,5815 9,268 0,161757115 0,161946972 31,67595049 0,55284963 155,5947859 2,715641312
169,599 94,811 151,811 0,5285 2,6927 -3,5309 -3,4392 9,599 0,167534155 0,167945008 30,44257409 0,531323151 154,3844242 2,694516517
169,933 94,984 152,707 0,5082 2,6730 -3,4369 -3,3015 9,933 0,173363555 0,173943044 29,24335123 0,510392763 153,2238438 2,674260567
170,27 95,152 153,603 0,4483 2,6541 -3,3469 -3,1683 10,27 0,179245314 0,17994108 28,07659581 0,49002904 152,111018 2,654838093
170,609 95,315 154,501 0,4594 2,6056 -3,0965 -2,7584 10,609 0,18516198 0,185939116 26,94071318 0,470204148 151,0440475 2,636215944
170,951 95,472 155,4 0,4495 2,6179 -3,1774 -2,9137 10,951 0,191131006 0,191937152 25,83419345 0,450891735 150,0211514 2,618363039
171,296 95,624 156,301 0,4305 2,6007 -3,0977 -2,7920 11,296 0,197152392 0,197935188 24,75560532 0,432066821 149,0406592 2,601250222
171,644 95,771 157,203 0,4120 2,5841 -3,0214 -2,6738 11,644 0,203226138 0,203933224 23,70359048 0,413705698 148,1010034 2,584850134
171,995 95,912 158,106 0,3937 2,5681 -2,9483 -2,5591 11,995 0,209352244 0,20993126 22,67685838 0,395785843 147,2007128 2,569137099
CATIA KONUM
DEĞERLERİ
MATLAB SONUÇLARI
w1=rad/s SOLIDWORKS
Page 50
41
Şekil 36 Matlab ve Solidworks programının karşılaştırılması
w3 w5 w6 alfa3alfa5
alfa6
1,4026 3,6791 -9,2691 -11,2791
1,3797 3,6514 -9,0798 -11,0228
1,3721 3,6422 -9,0169 -10,9377
1,3645 3,6330 -8,9552 -10,8543
1,3495 3,6148 -8,8331 -10,6892
1,2764 3,5267 -8,2505 -9,9017
1,2339 3,4759 -7,9222 -9,4584
1,2201 3,4593 -7,8161 -9,3150
1,1994 3,4348 -7,6600 -9,1043
1,0936 3,3100 -6,8868 -8,0605
1,0620 3,2730 -6,6637 -7,7593
1,0310 3,2371 -6,4497 -7,4701
1,0007 3,2020 -6,2434 -7,1910
0,9710 3,1680 -6,0454 -6,9231
0,9420 3,1348 -5,8550 -6,6649
0,9134 3,1025 -5,6713 -6,4156
0,8856 3,0711 -5,4951 -6,1761
0,8582 3,0404 -5,3252 -5,9447
0,8315 3,0107 -5,1619 -5,7217
0,8053 2,9818 -5,0049 -5,5070
0,7796 2,9536 -4,8539 -5,2997
0,7544 2,9263 -4,7086 -5,0998
0,7297 2,8996 -4,5687 -4,9065
0,7056 2,8738 -4,4344 -4,7203
0,6819 2,8487 -4,3054 -4,5407
0,6587 2,8243 -4,1810 -4,3667
0,6359 2,8007 -4,0616 -4,1989
0,6136 2,7777 -3,9468 -4,0367
0,5917 2,7555 -3,8366 -3,8799
0,5702 2,7339 -3,7305 -3,7281
0,5492 2,7130 -3,6288 -3,5815
0,5285 2,6927 -3,5309 -3,4392
0,5082 2,6730 -3,4369 -3,3015
0,4483 2,6541 -3,3469 -3,1683
0,4594 2,6056 -3,0965 -2,7584
0,4495 2,6179 -3,1774 -2,9137
0,4305 2,6007 -3,0977 -2,7920
0,4120 2,5841 -3,0214 -2,6738
0,3937 2,5681 -2,9483 -2,5591
MATLAB SONUÇLARI
w1=rad/s
alfa3
[derece/s 2]
alfa3
[rad/s 2]
alfa5 alfa6
[derece/s 2]
alfa5 alfa6
[rad/s 2]
-533,1983139 -9,3060661 -648,8558802 -11,32467148
-520,1287869 -9,0779599 -631,1694778 -11,01598553
-515,8810257 -9,0038224 -625,4235038 -10,91569936
-511,6861139 -8,9306074 -619,7500944 -10,81667969
-507,5431669 -8,8582994 -614,1479844 -10,71890442
-503,4513192 -8,7868831 -608,6159368 -10,62235198
-454,5455864 -7,9333171 -542,5590751 -9,469442248
-447,6703251 -7,8133211 -533,2796195 -9,307485194
-440,9530491 -7,6960826 -524,2143774 -9,149266871
-395,1542811 -6,8967433 -462,4100844 -8,070578467
-381,5003553 -6,6584373 -443,9747801 -7,748821708
-373,6539587 -6,5214918 -433,3758672 -7,563835781
-351,5540714 -6,135776 -403,494863 -7,042313874
-346,9180708 -6,0548626 -397,2195914 -6,932789724
-335,7354176 -5,8596885 -382,0697921 -6,668375845
-325,1050524 -5,6741536 -367,6478705 -6,416665827
-314,9924786 -5,4976559 -353,9059034 -6,176823257
-305,3659436 -5,3296411 -340,7998536 -5,948079535
-296,1961757 -5,1695985 -328,289187 -5,729727211
-287,4561512 -5,0170563 -316,3365348 -5,521114076
-279,1208866 -4,8715785 -304,907393 -5,321637921
-271,1672548 -4,7327614 -293,9698555 -5,130741881
-263,5738189 -4,600231 -283,4943762 -4,947910275
-254,9092451 -4,4490056 -271,4952794 -4,738486529
-246,7030636 -4,3057807 -260,0785357 -4,539226762
-240,1936842 -4,1921706 -250,9804631 -4,38043544
-232,7540715 -4,0623249 -240,5297966 -4,198036899
-226,8471885 -3,9592303 -232,1868218 -4,05242452
-220,0902968 -3,8413003 -222,5868285 -3,884873029
-213,6747326 -3,7293276 -213,4080337 -3,724672837
-208,5748559 -3,640318 -206,0610374 -3,596443563
-202,7348016 -3,5383898 -197,5850377 -3,44850946
-197,1838747 -3,4415078 -189,4580582 -3,30666691
-191,9062382 -3,3493957 -181,6580898 -3,170531779
-186,8872205 -3,2617973 -174,1646701 -3,039746934
-182,1132183 -3,1784753 -166,9587454 -2,913979822
-177,5716096 -3,0992092 -160,0225462 -2,792920309
-173,2506743 -3,0237947 -153,3394752 -2,676278716
-169,1395236 -2,9520416 -146,8940058 -2,563784053
SOLIDWORKS
SONUÇLARI
Page 51
42
Şekil 37 Açıların birbirlerine göre değişimi(w2=1 rad/s α=0 rad/s^2) değerleri için
Şekil 38 Solidworks ve matlab programın açısal hız değişimleri
(w2=1 rad/s α=0 rad/s^2) değerleri için
Şekil 39 Solidworks ve matlab programın açısal ivme değişimleri
(w2=1 rad/s α=0 rad/s^2) değerleri için
Page 52
43
5.5 Solidworks simülasyonda yapılmış analizin örnek bir uygulaması
x1/1 0,698180
40xt saniye zaman geçiyor.Bu zaman da oluşan tüm ivme ve açısal hız
değerleri Solidworks simulasyonla yapılır.Sonuçlar excelde düzenlenerek istenen açı değerindeki
açısal hız ve ivmeler bulunur ve kontrol edilir.
ii 2 i 2
xx1/
180
ot istenen noktadaki açı değişimidir.Matlab'te =175,275 açısı için
hesaplama yapılırsa ;
0
2
ii 2
175,275
x 15,275xx1/ x1/1 0,2665 saniye
180 180
o -160=15,275 açı değişimi olur.Bu açı değişimi istenen noktadaki (zamandaki )
değeri verir.
t
Bulunan bu zaman değerindeki hız ve ivme değeri solidworks'te grafiklerden okunarak
kontrol edilir.
Şekil 40 Solidworks simülasyonun 0.266 saniyedeki açısal hız gösterimi
Şekil 41 Simülasyon sonucu
3
3
14deg/ sec
14*0,244 rad / s
180
değeri radyan cinsene çevirirsek;
bulunur.
-3kol-1 -4kol-1
Time (sec) (deg/sec) rad/s Time (sec) (deg/sec) rad/s
0,264913257 14,24914 0,248694 0,264913 140,5704 2,453416
0,26591293 14,10969 0,246261 0,265913 140,4741 2,451736
0,266912602 13,97066 0,243834 0,266913 140,3787 2,450071
0,267912275 13,83204 0,241415 0,267912 140,2841 2,44842
0,268911948 13,69383 0,239002 0,268912 140,1903 2,446782
Page 53
44
5.6.Vektörel işlemler
Şekil 42 Mafsalların kuvvet bileşenleri
Şekil 43 Mafsalların kuvvet bileşenleri *detaylı+
Page 54
45
Şekil 44 Noktaların SPa' ya göre konum vektörleri
5.6.1.Noktaların kuvvet moment dengesi
10 10
10 10 10 10
9
( ) ( )
( - 0,0050 - 0,4665 - 0,0204 ) (5000 10000 5000 ) [ ]
x y z
A noktasındaki kuvvet ve moment dengesi
r xF M
r i r j r k x FXi FYj FZk M
i j k x i j k Nm
=-2128,8i-0076,8j+2282,5k
8 8
8 8 8 7
7 ;
( ) ( )
(-0,1734 0,0192 0 ) (5000 10000 5000 ) [ ]
x y z
A noktasına kuvvet taşınırsa
r xF M
r i r j r k x FXi FYj FZk M
i j k x i j k Nm
96i+867,2j-1830,5k
9 9
9 9 9 9
8 ;
( ) ( )
(-0,1546 0,0028 - 0,0250 ) (5000 10000 5000 ) [ ]
x y z
A noktasına kuvvet taşınırsa
r xF M
r i r j r k x FXi FYj FZk M
i j k x i j k Nm
263,7i-648,2j-1560,1k
Page 55
46
3 3
3 3 3 3
3
( ) ( )
(-0,0270 0,2080 0,0250 ) (5000 10000 5000 ) [ ]
x y z
A noktasındaki kuvvet ve moment dengesi
r xF M
r i r j r k x FXi FYj FZk M
i j k x i j k Nm
790,5i+260,j-1310,5k
8 9 10
8 9 10 8 9 10 8 9 10
( ker .)
( ) ( ) ( )
[ ]
T
T
T
M M M M vektörel toplamı ile te lekten gelen kuvvetler aksona indirgenmiştir
M M M M i M M M j M M M k
M Nm
-1769,1i+1438,6j-1108k
3x 4x a3x
3y 4y a3y 3
3z 4z a3z
3 4 ;
0 F +F +FX+Rx+F =0
0 F +F +FY+Ry+F +m *g =0
0 F +F +FZ+Rz+F =0
0 A4 noktasına göre moment alınırsa;
4( 4 ( 3 )) ( 3)
2
A ve A noktaları kuvvet denklemleri
Fx
Fy
Fz
M
rM r x F R xFa T 3
41 2 3 3 ( * )
2
rR TR TR T xm g
1x 2x 3x a1x a2x
1y 2y 3y a1y a2y 1 2
1z 2z 3z a1z a2z
1 1
1 2
0 F +F +F +F +F =0
0 F +F +F +F +F +(m +m )*g =0
0 F +F +F +F +F =0
0 A4 noktasına göre moment alınırsa;
( ) (
A ve A noktaları kuvvet denklemleri
Fx
Fy
Fz
M
M r xF r 1 22 2 1 2 1 2 1 2) ( ) ( ) 0
2 2 a a
r rxF T T xF xF T T
4x 5x 6x a5x a6x
4y 5y 6y a5y a6y 5 6
4z 5z 6z a5z a6z
5 5 6
A5 ve A6 noktaları kuvvet denklemleri
0 F +F +F +F +F =0
0 F +F +F +F +F +(m +m )*g =0
0 F +F +F +F +F =0
0 A4 noktasına göre moment alınırsa;
( ) (
Fx
Fy
Fz
M
M r xF r 5 66 5 6 5 6) ( ) ( ) 0
2 2 a a
r rxF T T xF xF
Page 56
47
BÖLÜM ALTI
ANALİZ
Analizde statik analiz yapılmış ve malzemenin elastisite modülü (E) oldukça büyütülerek
esnek durumdan rigid davranış sergilemesi sağlanmıştır.
6.1.Üst salıncak analizi
Şekil 45 Üst salıncağın mesh yapılmış hali
Şekil 46 Üst salıncağın kuvvet girdilerinin Ansys 'e girilmesi
Page 57
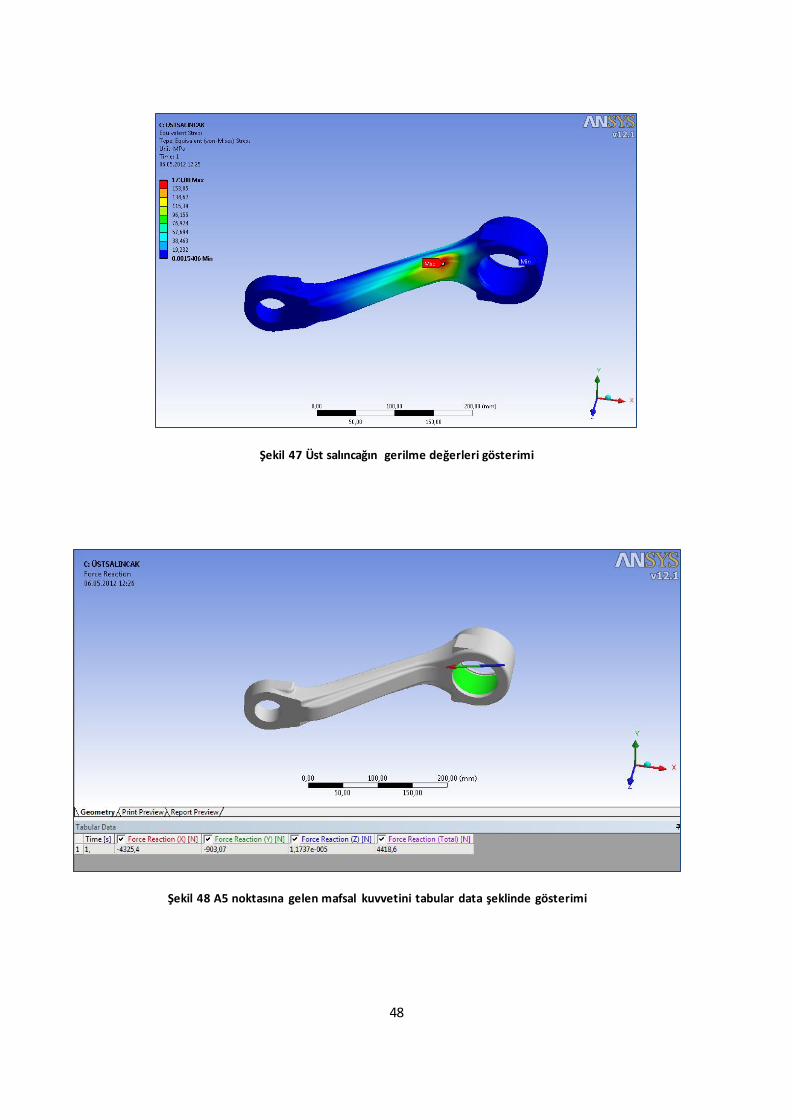
48
Şekil 47 Üst salıncağın gerilme değerleri gösterimi
Şekil 48 A5 noktasına gelen mafsal kuvvetini tabular data şeklinde gösterimi
Page 58
49
Şekil 49 Üst salıncak için kuvvet girdileri
Şekil 50 Ansys ve Matlab programını karşılaştırmalı sonuçları
Şekil 51 Grafiksel olarak Ansys ve Matlab sonuçlarının karşılaştırılması
F4X F4Y F4Z F4X F4Y F4Z T5 Fa5x Fa5y
8668,40 1862,5 0,00 4334,20 931,25 0 -9,7047 -8,8081 19,3174
12475,00 2641,9 0,00 6237,50 1320,95 0 -9,7047 -8,8081 19,3174
11975,00 2539,5 0,00 5987,50 1269,75 0 -9,7047 -8,8081 19,3174
13759,00 2904,8 0,00 6879,50 1452,4 0 -9,7047 -8,8081 19,3174
15293,00 3218,9 1750,00 7646,50 1609,45 875 -9,7047 -8,8081 19,3174
17395,00 3995,5 2500,00 8697,50 1997,75 1250 -67,4163 -494,603 45,4541
17954,00 4109,9 2500,00 8977,00 2054,95 1250 -67,4163 -494,603 45,4541
17881,00 3524,7 2500,00 8940,50 1762,35 1250 -67,4163 -494,603 45,4541
18826,00 3718,1 2500,00 9413,00 1859,05 1250 -67,4163 -494,603 45,4541
ÜST SALINCAK MATLABÜST SALINCAK ANSYS
GİRDİ KUVVETLERİ
F5X F5Y F5z F5X F5Y F5z
-4325,4 -903,07 1,17E-05 -4329,8 -911,46 0
-6227,40 -1340 3,31E-05 -6233,2 -1301,2 0
-5977,50 -1288,8 3,30E-05 -5983,2 -1250 0
-6869,30 -1471,4 3,78E-05 -6875,3 -1432,6 0
-7636,10 -1628,4 8,75E-03 -7642,3 -1589,7 0
-8201,1 -2042,8 4,94E-05 -8450,1 -1991 0
-8480,50 -2100 -1,18E-05 -8729,7 -2048,3 0
-8444,10 -1807,4 -6,35E-06 -8713,7 -1656,4 0
-8916,50 -1904,1 5,26E-05 -9186,2 -1753,1 0
ÜST SALINCAK
ANSYS SONUÇLARI
ÜST SALINCAK
MATLAB SONUÇLARI
Page 59
50
6.2 Akson analizi
Şekil 52 Aksonun mesh yapılmış hali
Şekil 53 Aksonun kuvvet ve momentlerinin girilmesi
Page 60
51
Şekil 54 Aksonun A4 noktasına gelen mafsal kuvvetlerinin gösterilmesi
Şekil 55 Aksonun gerilme dağılımının gösterimi
Page 61
52
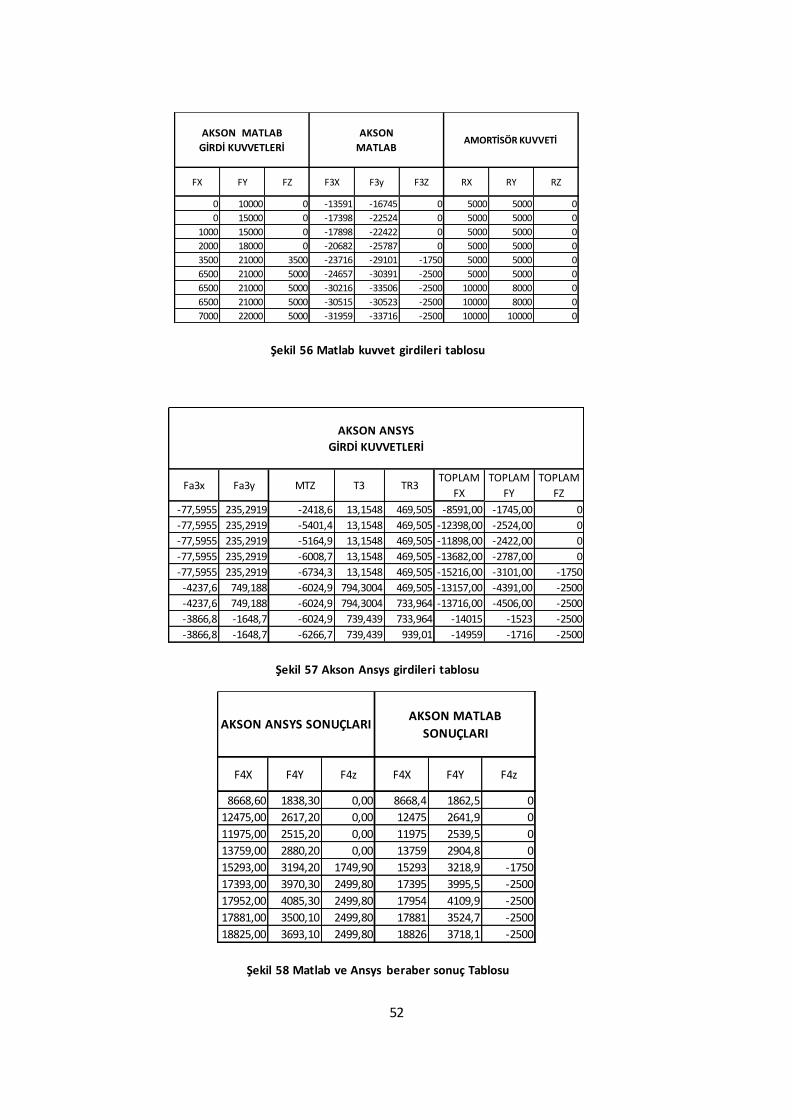
Şekil 56 Matlab kuvvet girdileri tablosu
Şekil 57 Akson Ansys girdileri tablosu
Şekil 58 Matlab ve Ansys beraber sonuç Tablosu
FX FY FZ F3X F3y F3Z RX RY RZ
0 10000 0 -13591 -16745 0 5000 5000 0
0 15000 0 -17398 -22524 0 5000 5000 0
1000 15000 0 -17898 -22422 0 5000 5000 0
2000 18000 0 -20682 -25787 0 5000 5000 0
3500 21000 3500 -23716 -29101 -1750 5000 5000 0
6500 21000 5000 -24657 -30391 -2500 5000 5000 0
6500 21000 5000 -30216 -33506 -2500 10000 8000 0
6500 21000 5000 -30515 -30523 -2500 10000 8000 0
7000 22000 5000 -31959 -33716 -2500 10000 10000 0
AMORTİSÖR KUVVETİ AKSON MATLAB
GİRDİ KUVVETLERİ
AKSON
MATLAB
Fa3x Fa3y MTZ T3 TR3TOPLAM
FX
TOPLAM
FY
TOPLAM
FZ
-77,5955 235,2919 -2418,6 13,1548 469,505 -8591,00 -1745,00 0
-77,5955 235,2919 -5401,4 13,1548 469,505 -12398,00 -2524,00 0
-77,5955 235,2919 -5164,9 13,1548 469,505 -11898,00 -2422,00 0
-77,5955 235,2919 -6008,7 13,1548 469,505 -13682,00 -2787,00 0
-77,5955 235,2919 -6734,3 13,1548 469,505 -15216,00 -3101,00 -1750
-4237,6 749,188 -6024,9 794,3004 469,505 -13157,00 -4391,00 -2500
-4237,6 749,188 -6024,9 794,3004 733,964 -13716,00 -4506,00 -2500
-3866,8 -1648,7 -6024,9 739,439 733,964 -14015 -1523 -2500
-3866,8 -1648,7 -6266,7 739,439 939,01 -14959 -1716 -2500
AKSON ANSYS
GİRDİ KUVVETLERİ
F4X F4Y F4z F4X F4Y F4z
8668,60 1838,30 0,00 8668,4 1862,5 0
12475,00 2617,20 0,00 12475 2641,9 0
11975,00 2515,20 0,00 11975 2539,5 0
13759,00 2880,20 0,00 13759 2904,8 0
15293,00 3194,20 1749,90 15293 3218,9 -1750
17393,00 3970,30 2499,80 17395 3995,5 -2500
17952,00 4085,30 2499,80 17954 4109,9 -2500
17881,00 3500,10 2499,80 17881 3524,7 -2500
18825,00 3693,10 2499,80 18826 3718,1 -2500
AKSON ANSYS SONUÇLARI AKSON MATLAB
SONUÇLARI
Page 62
53
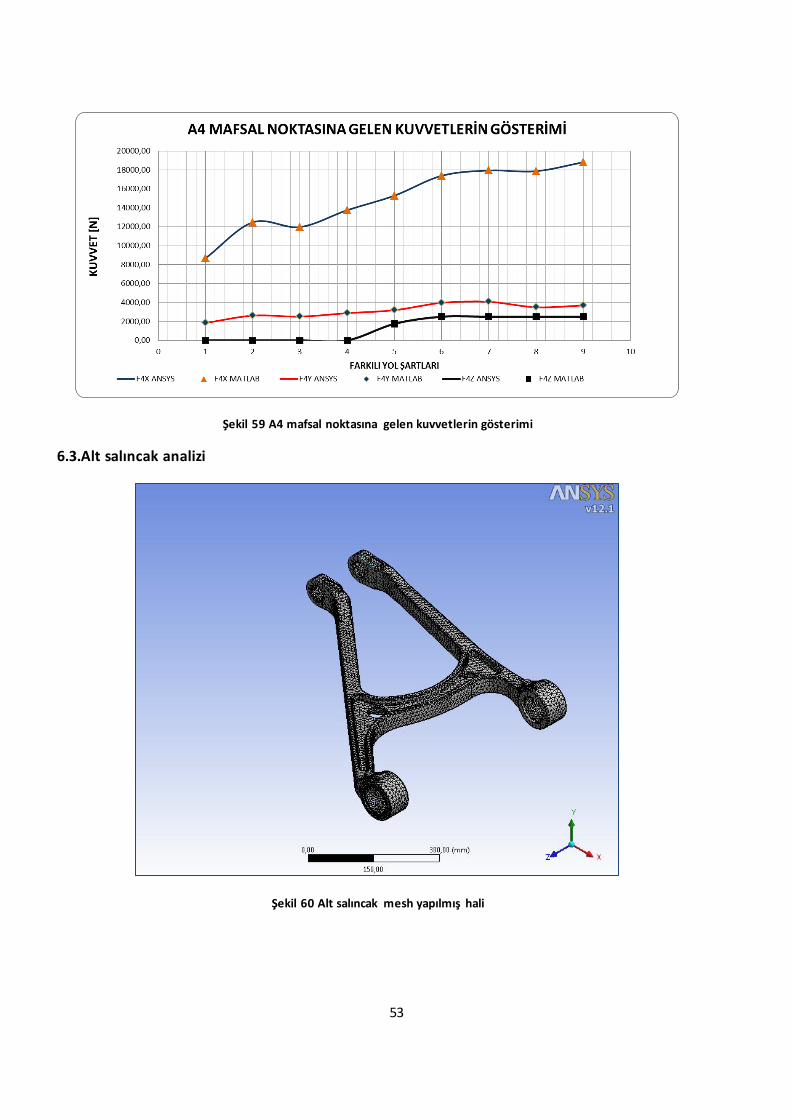
Şekil 59 A4 mafsal noktasına gelen kuvvetlerin gösterimi
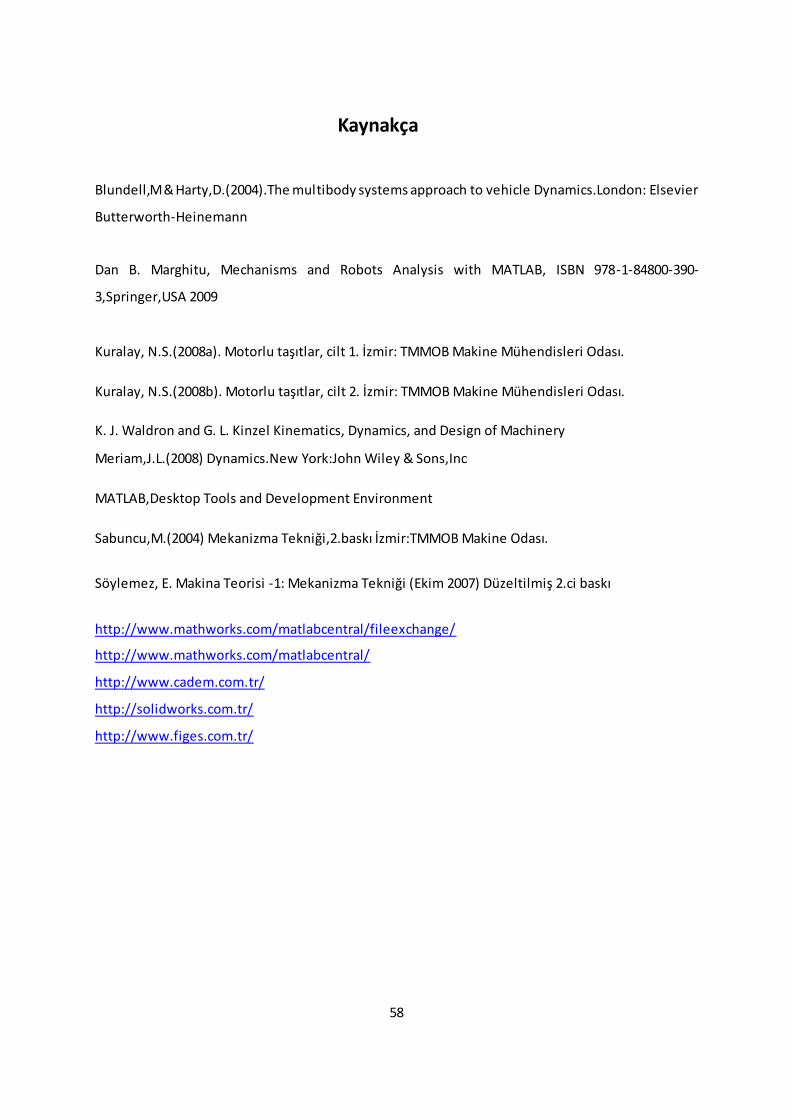
6.3.Alt salıncak analizi
Şekil 60 Alt salıncak mesh yapılmış hali
Page 63
54
Şekil 61 Alt salıncak için kuvvet ve momentlerinin girilmesi
Şekil 62 Alt salıncak gerilmesinin gösterilmesi
Page 64
55
Şekil 63 Alt salıncak mafsal noktalarındaki kuvvetlerin gösterimi
Şekil 64 Alt salıncak mafsal noktalarındaki kuvvetlerin gösterimi
Page 65
56
Şekil 65 Matlab sonuçlarının beraber ekran da grafiksel olarak gösterilmesi
Page 66
57
BÖLÜM YEDİ
SONUÇLAR
Zeminden gelen kuvvetlerin mafsal noktalarına kadar iletilmesi durumunda genel amaçlı bir
matlab program yazılmıştır. Bu programda gelen kuvvetlerin ve oluşan atalet tork ve
ivmelerin sisteme etkisi incelenmiştir. Programın doğruluğu açısal hız ve ivme için matlab
programı Solidworks simülasyonla kontrol edilmiştir. Sonuçlar ilgili yerlerde açıklanmıştır.
Hesaplanan kuvvetlerin değerleri Ansys Workbench programıyla karşılaştırılmıştır. Yakın
değerler bulunmuştur.
Düşük açısal ivme değerlerinde mafsallara gelen kuvvetlerin fazla değişmedi aracın tüm
kütlesine göre ihmal edilebileceği daha yüksek hız ve ivmelerde oluşan yüksek atalet kuvvet
ve torkların kuvvetleri çok fazla değiştirdiği görülmüştür.
Page 67
58
Kaynakça
Blundell,M & Harty,D.(2004).The multibody systems approach to vehicle Dynamics.London: Elsevier
Butterworth-Heinemann
Dan B. Marghitu, Mechanisms and Robots Analysis with MATLAB, ISBN 978-1-84800-390-
3,Springer,USA 2009
Kuralay, N.S.(2008a). Motorlu taşıtlar, cilt 1. İzmir: TMMOB Makine Mühendisleri Odası.
Kuralay, N.S.(2008b). Motorlu taşıtlar, cilt 2. İzmir: TMMOB Makine Mühendisleri Odası.
K. J. Waldron and G. L. Kinzel Kinematics, Dynamics, and Design of Machinery
Meriam,J.L.(2008) Dynamics.New York:John Wiley & Sons,Inc
MATLAB,Desktop Tools and Development Environment
Sabuncu,M.(2004) Mekanizma Tekniği,2.baskı İzmir:TMMOB Makine Odası.
Söylemez, E. Makina Teorisi -1: Mekanizma Tekniği (Ekim 2007) Düzeltilmiş 2.ci baskı
http://www.mathworks.com/matlabcentral/fileexchange/
http://www.mathworks.com/matlabcentral/
http://www.cadem.com.tr/
http://solidworks.com.tr/
http://www.figes.com.tr/
Page 68
59
BÖLÜM SEKİZ
Semboller
Semboller Birim Açıklama
w1, w2, w3, w5, w6 [rad/s] Açısal hız
α1 α2 α3 α4 α5 α6 [rad/s2] Açısal ivme
F1x ,F1y,F1z [N] A1 noktasına etki eden kuvvet
F2x F2y F2 [N] A2 noktasına etki eden kuvvet
F3x ,F3y,F3z [N] A3 noktasına etki eden kuvvet
F5x F5y F5 [N] A5 noktasına etki eden kuvvet
F6x ,F6y,F6z [N] A6 noktasına etki eden kuvvet
Rx RyRz [N] Amortisör kuvvet bileşenleri
a1x a1y a1z [m/s2] Atalet ivmesi
a2x a2y a2z [m/s2] Atalet ivmesi
a3x a3y a3z [m/s2] Atalet ivmesi
a4x a4y a4z [m/s2] Atalet ivmesi
a5x a5y a5z [m/s2] Atalet ivmesi
a6x a6y a6z [m/s2] Atalet ivmesi
a0 a1 a2 a3 a4 a5 a6 [mm] Mafsal noktalarının koordinatları
a7 a8 a9 a10 aa [mm] Mafsal noktalarının koordinatları
I1 I2 I3 I5 I6 [kg/m2] Atalet momenti
T1 T3 T3 T5 T6 [Nm] Atalet torku
m1 m2 m3 m5 m6 [kg] kütle
L1 L2 L3 L5 L6 [m] Çubukların uzunlukları
R1X R1Y R1Z [m] konum vektörü
M10 M9 M8 M7 [Nm] Taşınan moment değerleri
MTX MTY MTZ [Nm] Toplam moment
Page 69
60
rc [m] a5 ve a4 noktası x-y düzlemindeki konum
vektörleri uzunluğu
z56 [m] a5 ve a6 noktasının z yönündeki konum vektörü uzunluğu ra [m] a3 ve a1 noktasının x-y düzlemindeki konum
vektörü uzunluğu
z12 [m] a1 ve a2 noktasının z yönündeki konum
Vektörü uzunluğu
rb [m] a3 den a1 moment kolu
z1 [m] o1 noktasına göre a1 ve a2 noktalarının
uzunluğu