Control Engineering Practice 15 (2007) 487–500 Multivariable robust control of a rotary dryer: Analysis and design M.G. Ortega , F. Castan˜o, M. Vargas, F.R. Rubio Depto. Ingenierı´a de Sistemas y Automa ´tica, Universidad de Sevilla, Escuela Superior de Ingenieros, Camino de los Descubrimientos sn, 41092 Sevilla, Spain Received 27 April 2005; accepted 7 September 2006 Available online 13 November 2006 Abstract This paper describes the analysis and control of an industrial process usually controlled in manual mode: a continuous rotary dryer. Two process variables are controlled simultaneously: the outlet moisture of the dried material and the output temperature of the exhaust air. To do this, the flow of wet material and the flow of fuel are used as control variables. Thus, this constitutes a MIMO system, with two inputs and two outputs. The system is identified at several operating points, and a controllability analysis is performed in order to find any constraints in its performance. A multivariable robust control based on the H 1 mixed sensitivity problem is proposed. Simulation and experimental results are included, using different adjustments of the weighting matrices based on the performed experiments. Results attained agree with the controllability analysis conclusions. r 2006 Elsevier Ltd. All rights reserved. Keywords: Process control; Industrial processes; Rotary dryer; Controllability analysis; Robust control; H 1 Mixed sensitivity problem 1. Introduction Despite the importance of drying processes for the industry, the automatic control of this kind of system is still in a precarious state, since many installations are usually operated in manual mode. This paper offers an analysis and study of a continuous rotary dryer, showing a number of problems connected to these kinds of processes. Basically, the drying process in a rotary installation consists in the reduction of the outlet moisture content of a product to a desired value. This process uses a continuous rotary drum in which the wet material is tumbled, or mechanically turned over, usually in the same direction, while extremely hot air is continuously flowing. The main control objective is to regulate the outlet moisture level, but it is also interesting to control the output temperature of the exhaust air, since it may be employed as supply for other processes. These require- ments impose a strict and permanent control of the plant, which is not easy to achieve in manual mode. The difficulty in controlling this type of plants lies in the physical properties of the product to be dried, as well as in the change of these properties with the different moisture percentages. The movement of the material throughout the drum, the adhesion of the particles to one another or to the drum blades, the evaporation speed, etc., are examples of factors strongly influenced by the moisture level. This implies a quite different system behavior depending on the operating conditions. In fact, there is not a complete knowledge of the drying process, since too many phenomena all connected to each other, such as heat and mass exchange, movement of solids, evaporation, capillarity, superficial tension, diffu- sion, and so on, are involved in it. This implies a highly complex behavior that is quite difficult to model. The scientific community has been interested in the modelling problem of these kinds of processes, and so far, some mathematical models have been developed (see, for instance, Brasil and Seckler, 1988; Deich and Stalskii, 1975; Douglas et al., 1993; Duchesne et al., 1997; Reay, 1979). Most agree that it is very difficult to carry out a fine tuning of the model parameters. Furthermore, the tuning proce- dure is different for each specific material, and it is valid only for very limited operating conditions. ARTICLE IN PRESS www.elsevier.com/locate/conengprac 0967-0661/$ - see front matter r 2006 Elsevier Ltd. All rights reserved. doi:10.1016/j.conengprac.2006.09.005 Corresponding author. Tel.: +34 9 54486037; fax: +34 9 54487540. E-mail addresses: [email protected] (M.G. Ortega), [email protected] (F. Castan˜o), [email protected] (M. Vargas), [email protected] (F.R. Rubio).
Multivariable robust control of a rotary dryer: Analysis and design
M.G. Ortega�, F. Castano, M. Vargas, F.R. Rubio
Depto. Ingenierıa de Sistemas y Automatica, Universidad de Sevilla, Escuela Superior de Ingenieros, Camino de los Descubrimientos sn, 41092 Sevilla, Spain
Received 27 April 2005; accepted 7 September 2006
Available online 13 November 2006
Abstract
This paper describes the analysis and control of an industrial process usually controlled in manual mode: a continuous rotary dryer.
Two process variables are controlled simultaneously: the outlet moisture of the dried material and the output temperature of the exhaust
air. To do this, the flow of wet material and the flow of fuel are used as control variables. Thus, this constitutes a MIMO system, with two
inputs and two outputs. The system is identified at several operating points, and a controllability analysis is performed in order to find
any constraints in its performance. A multivariable robust control based on the H1 mixed sensitivity problem is proposed. Simulation
and experimental results are included, using different adjustments of the weighting matrices based on the performed experiments. Results
attained agree with the controllability analysis conclusions.
r 2006 Elsevier Ltd. All rights reserved.
Keywords: Process control; Industrial processes; Rotary dryer; Controllability analysis; Robust control; H1 Mixed sensitivity problem
1. Introduction
Despite the importance of drying processes for theindustry, the automatic control of this kind of system is stillin a precarious state, since many installations are usuallyoperated in manual mode. This paper offers an analysisand study of a continuous rotary dryer, showing a numberof problems connected to these kinds of processes.
Basically, the drying process in a rotary installationconsists in the reduction of the outlet moisture content of aproduct to a desired value. This process uses a continuousrotary drum in which the wet material is tumbled, ormechanically turned over, usually in the same direction,while extremely hot air is continuously flowing.
The main control objective is to regulate the outletmoisture level, but it is also interesting to control theoutput temperature of the exhaust air, since it may beemployed as supply for other processes. These require-ments impose a strict and permanent control of the plant,which is not easy to achieve in manual mode.
e front matter r 2006 Elsevier Ltd. All rights reserved.
nengprac.2006.09.005
ing author. Tel.: +349 54486037; fax: +34 9 54487540.
The difficulty in controlling this type of plants lies in thephysical properties of the product to be dried, as well as inthe change of these properties with the different moisturepercentages. The movement of the material throughout thedrum, the adhesion of the particles to one another or to thedrum blades, the evaporation speed, etc., are examples offactors strongly influenced by the moisture level. Thisimplies a quite different system behavior depending on theoperating conditions.In fact, there is not a complete knowledge of the drying
process, since too many phenomena all connected to eachother, such as heat and mass exchange, movement ofsolids, evaporation, capillarity, superficial tension, diffu-sion, and so on, are involved in it. This implies a highlycomplex behavior that is quite difficult to model.The scientific community has been interested in the
modelling problem of these kinds of processes, and so far,some mathematical models have been developed (see, forinstance, Brasil and Seckler, 1988; Deich and Stalskii, 1975;Douglas et al., 1993; Duchesne et al., 1997; Reay, 1979).Most agree that it is very difficult to carry out a fine tuningof the model parameters. Furthermore, the tuning proce-dure is different for each specific material, and it is validonly for very limited operating conditions.
ARTICLE IN PRESSM.G. Ortega et al. / Control Engineering Practice 15 (2007) 487–500488
This paper describes the control of a rotary dryer thatuses sand as a working material. The output temperature ofthe exhaust air and the outlet moisture of the sand areregulated simultaneously, making a multivariable controlapproach suitable.
From the point of view of control, the application ofseveral control techniques can be found in the literaturefor these types of systems, ranging from elementaryPID control (Arjona et al., 2005) to predictive control(Didriksen, 2002), fuzzy control (Yliniemi, 1999) or others(Courtois, 1997; Savaresi et al., 2001), though they allimplement monovariable control loops.
Being aware of the complexity of the drying process, itcould be appropriate to implement a controller which cancope with the coupling and strong uncertainties thatmay exist when modelling these systems. Accordingto this, the development of a robust controller seemssuitable. This paper describes one in particular: a multi-
variable H1 controller, based on the mixed sensitivityproblem.
The remainder of this article is organized as follows: inSection 2, a description of the process is presented, andits model is obtained in Section 3. This model is validatedwith real data obtained from the process, and employedfor deriving some transfer matrices at different workingpoints. A controllability analysis of the linearized systemis carried out in Section 4, in order to show the behaviorlimitations of the plant. The synthesis of the H1 robustcontroller is described in Section 5. Simulation andexperimental results attained by means of this robustcontroller are presented in Sections 6 and 7, and,finally, the main conclusions to be drawn are given inSection 8.
Fig. 1. Co-current
2. Plant description
The system considered corresponds to a co-current rotary
dryer (see Fig. 1), which is located on the terrace roof of thelaboratories of the Dept. Ingenierıa de Sistemas y Auto-
matica of the University of Seville. The plant makes use of adistributed control system that allows the control andintegral monitoring of the drying process.A simplified diagram of the rotary dryer is depicted in
Fig. 2, basically showing three different areas:
�
ro
The feeding area, which consists of a burner and twohoppers. The burner uses gas as fuel to heat theincoming flow of air. This current of hot air is employedto dry the wet matter. The hoppers contain the wetmaterial, which is carried into the drum by means of aworm gear and a conveyor belt. This configurationallows us to control both the flow of fuel and the inletflow of wet matter.
� The rotary drum area. The wet material from the feeding
area is continuously hauled by the rotation of the drum,and dropped into the hot air stream circulatingthroughout the drum. The cylinder (4m in length and0.8m in width) has inside a number of continuousblades, so while it is turning, these blades take thematerial and propels it into the gaseous current. Thedrum usually turns at a speed between 3 and 10 rpm,moved by a 3 kW electrical motor coupled to a gearreduction unit. The air speed ranges between 1.5 and4m/s, depending on the size of the particles to be driedand on the quantity of fine powder produced during theprocess. The speed of rotation, pitch angle and airvelocity determine the material delay time.
tary dryer.
ARTICLE IN PRESS
FEEDING AREA ROTARY DRUM AREA OUTPUT AREA
Fuel
Air
Hot Air
Wet material Exhaust air
Dried materialwater
water
water
motor
Air filter
Fig. 2. Diagram of the co-current rotary dryer.
Wi
Fgi-1+Fsti-1
Fsi-1+Fwi-1
Fsi+Fwi
Fgi+Fsti
M.G. Ortega et al. / Control Engineering Practice 15 (2007) 487–500 489
For the sake of efficiency, it is essential to set up the flowof solid materials helped by the air stream (see Fig. 2),since a significant amount of moisture must be evapo-rated in the first stages of the drying process. This makesit possible for high temperatures to be reached in theincoming air without reaching dangerously high tem-peratures in the material to be dried. Since thetemperatures of the air and of the solid materials tendto converge when both flows reach the drum outlet, thetemperature of the solids that leave the cylinder can becontrolled to reach their maximum value, while main-taining the advantage of having a wide range oftemperatures in the first stages.
�
Fig. 3. ith element of the dryer drum.
The output area. In this area, the dried product and theexhaust air are extracted from the drum and takenoutside the process. On one end, the solid material dropsinto a small hopper, and from this one to anotherconveyor belt. On the other end, the exhaust air is guidedthrough a dust filter, which is located before the suctionfan used to create the air stream.
From this output area, the exhaust air could be used forfeeding another process, provided that the air currentmeets the adequate conditions. Therefore, it may beimportant to control not only the moisture of the driedproduct, but also the temperature of the exhaust air.
3. Process model
3.1. Thermodynamic model
In rotary dryers, water is removed from a material bymeans of a hot air stream. This transfers heat to the solidand reduces its humidity content. Heat transmission takesplace mainly by conduction and convection in adiabaticconditions.
Thus, the system can be modelled by a set of nonlinearequations describing energy and mass balances (Rubio
et al., 2000; Rubio et al., 2001). Due to the drum’sgeometry, strong gradients of concentration and tempera-ture appear. Therefore, the application of mass andenergy balances gives rise to partial derivatives anddifferential equations, which can be avoided dividing thedryer drum into a finite number, n, of elements in series(Savaresi et al., 2001). Fig. 3 shows a generic element, towhich balance equations are applied. In this figure, Fg isthe mass flow of dry gas, F st is the mass flow of steamin the gas, F s is the mass flow of dry solid, F w is themass flow of water in the solid, and W is the flow ofevaporated water.Balance equations come from the analysis of the flows
that go across the ith section. Assuming that the conditionsat the dryer input are known, the outputs of each sectionare computed and used as the input values for the nextsection. Many variables appear in each element, such asspecific heat of water and solid, specific heat at constantpressure of the dry gas and water steam, latent heatof vaporization, volumetric heat transfer coefficient,among others.
ARTICLE IN PRESS
Rotary dryer
To
Mo
Fc
Fp
Fig. 5. MIMO system.
M.G. Ortega et al. / Control Engineering Practice 15 (2007) 487–500490
In the same way, it was necessary to develop a model ofthe combustion process in the feeding area, which is alsogoverned by differential equations. A complete model of aburner should include a combustion performance study, aheat transmission analysis, along with other information.The variables involved in the combustion process are quitesimilar to those mentioned in the previous paragraph.
For the sake of completeness, a more detailed butconcise description of the equations and physical variablesinvolved in both parts of the nonlinear model is given inAppendix A.
3.2. Nonlinear model validation
This model has been validated using data obtained fromthe real plant. These data were used to estimate many of theparameters that appear in the model which are not perfectlyknown, since they depend on the operating conditions.
Fig. 4 shows a comparison between real and simulatedoutputs obtained from real input data. It can be seen thatthe nonlinear model is able to reproduce the fundamentaldynamics, with a relatively small steady-state error undersignificant changes on either output: the output tempera-ture of the exhaust air (To), and the outlet moisture contentof the dried product (Mo).
The data used as input for these model validationexperiments come from independent PRBS-type (pseudor-andom binary sequence) variations in the inputs around theconstant DC values of the corresponding operating points.
3.3. Linear models
Linear models have been developed in order tosynthesize the robust controller. Thus, the plant has beenmodelled as a multivariable system (see Fig. 5) whosecontrol variables are the mass flow of fuel (F c) and the
0 50 100 150 200 250 30040
45
50
55
60
time (minutes)
To:
Exh
aust
air
tem
pera
ture
(°C
)
0 50 100 150 200 250 3000
0.2
0.4
0.6
0.8
1
time (minutes)
Mo
: Out
let
moi
stur
e (
%)
real
simulated
real
simulated
Fig. 4. Measured and simulated outputs. Left: significant chan
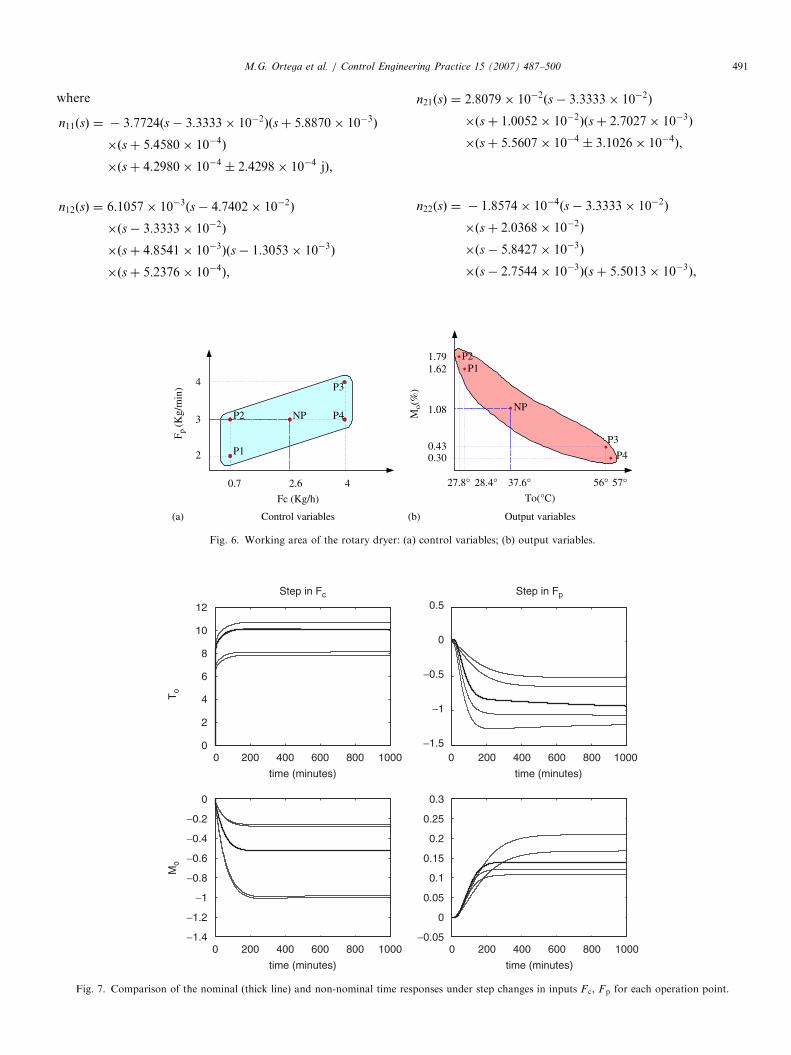
mass flow of wet material (Fp). The controlled variables arethe outlet moisture content of the dried product (Mo) andthe output temperature of the exhaust air (To).Several models were obtained at different operating
points. Fig. 6a shows the working space in terms of controlvariables, whilst Fig. 6b shows it in terms of outputvariables. The nominal operating point, denoted as NP, aswell as other extreme points are marked. These values wereobtained from the real plant, where the variation of the fuelmass flow is around 70% and the variation of the mass flowof wet material is approximately 33%, both with respect tonominal conditions.It should be noticed that the plant does not work
properly if the flow of fuel is low and the solid flow is highor vice versa. In the first case, a small amount of heat isprovided for too much wet material, which causes tosignificant bonding of the material. In the second extremecondition, too much heat is supplied for a small amount ofwet material and, therefore, there may be risk of a fire.In order to describe the fundamental dynamic behavior of
the system, some linear models have been identified atdifferent operating points by means of classical identifica-tion techniques (Camacho and Bordons, 1995; Ljung, 1986).In particular, multivariable ARX models were computed
applying pseudorandom binary sequences at the non-linearmodel inputs. As a result, the identified nominal model was
GðsÞ ¼1
dðsÞ
n11ðsÞ n12ðsÞ
n21ðsÞ n22ðsÞ
!, (1)
0 50 100 150 200 250 30040
45
50
55
60
65
time (minutes)
To:
Exh
aust
air
tem
pera
ture
(°C
)
0 50 100 150 200 250 3000
0.2
0.4
0.6
0.8
1
time (minutes)
Mo:
Out
let
moi
stur
e (
%)
real
simulated
real
simulated
ges in output To. Right: significant changes in output Mo
�ðs� 2:7544� 10 Þðsþ 5:5013� 10 Þ,
ARTICLE IN PRESSM.G. Ortega et al. / Control Engineering Practice 15 (2007) 487–500 491
Fig. 7. Comparison of the nominal (thick line) and non-nominal time res
n21ðsÞ ¼ 2:8079� 10�2ðs� 3:3333� 10�2Þ
�ðsþ 1:0052� 10�2Þðsþ 2:7027� 10�3Þ
�ðsþ 5:5607� 10�4 � 3:1026� 10�4Þ,
n22ðsÞ ¼ � 1:8574� 10�4ðs� 3:3333� 10�2Þ
�ðsþ 2:0368� 10�2Þ
�ðs� 5:8427� 10�3Þ
�3 �3
To(°C)
Mo(
%)
1.08
1.79
37.6°27.8°
NP
P1P2
P3
P4
57°28.4°
0.43
1.62
56°
0.30
Output variablesb)
) control variables; (b) output variables.
0 200 400 600 800 1000−1.5
−1
−0.5
0
0.5
time (minutes)
Step in Fp
0 200 400 600 800 1000−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
time (minutes)
ponses under step changes in inputs F c, Fp for each operation point.
ARTICLE IN PRESSM.G. Ortega et al. / Control Engineering Practice 15 (2007) 487–500492
dðsÞ ¼ ðsþ 3:3049� 10�2Þðsþ 5:1752� 10�3Þ
�ðsþ 5:5221� 10�4Þ
�ðsþ 3:9957� 10�4 � 2:2141� 10�4 jÞ.
These continuous-time transfer matrices have been ob-tained for each operation point after conversion fromdiscrete-time domain using a bilinear inverse transforma-tion (sampling time equal to 60 s). In the next section, acontrollability analysis is made based on the continuousnominal model, though keeping in mind that the results areno longer valid for frequencies near the sampling rate.
In order to help the reader perceive the differences of thefive transfer functions, Fig. 7 shows the corresponding stepresponses under changes in either input.
4. Controllability analysis
In this section, a basic input–output controllability
analysis (Skogestad and Postlethwaite, 1996) on thenominal linear model is made in order to check limitationsof the closed-loop performance. This analysis was alsocarried out on the other operating points, and the attainedresults were similar to those presented next.
First, the system has to be adjusted in scale, in agreementwith the maximum allowed deviation of each input andoutput. In this application, the following values have beenchosen as maximum variations:
DF c max ¼ 1:4 kg=h; DTo max ¼ 5 �C,
DFp max ¼ 0:5 kg=min; DMo max ¼ 0:3.
Taking these values into account, the system can be scaledby means of the following expression:
GðsÞ ¼ D�1e GðsÞDu,
where GðsÞ is the original linear model obtained in thepreceding section and GðsÞ is the scaled system. The twoscaling matrices De and Du are built as follows:
De ¼DTo max 0
0 DMo max
" #¼
5:0 0
0 0:3
� �,
Du ¼DF c max 0
0 DFp max
" #¼
1:4 0
0 0:5
� �.
The first step of the analysis consists in studying the poles
and zeros of the system (see Skogestad and Postlethwaite,1996, for instance). Table 1 shows these values in thecontinuous time domain.
Table 1
Poles and zeros of the nominal model
Poles: �3:305� 10�2, �5:175� 10�3, �3
Zeros: �7:065� 10�3, 2:287� 10�3 � 2:04
It can be seen that the system is stable, which does notimply any strong constraint in the closed-loop behavior.However, the system has some zeros in the right half plane(RHP), which impose some limitations on the systemperformance (Astrom, 2000). The most restrictive RHP-zeros are those with the smallest magnitudes. In ourcase, such zeros are located at zRHP ¼ 2:287� 10�3�2:041� 10�3j. This yields an approximate upper boundfor the control bandwidth oc equal to (Skogestad andPostlethwaite, 1996):
ocojzRHPj
2:8’ 1:09� 10�3 rad=s
which gives the following approximate lower bound for therise time, at least for one output:
tr �p
2oc41434 s ’ 24 min .
However, since the system is a multivariable one, it is alsoimportant to consider the direction of the RHP-zeros, atleast their output directions. In our case, zRHP has thefollowing output direction:
To
Mo
!¼
�0:145þ 0:250 j
�0:156� 0:94457 j
!.
It can be seen that the first component (its absolute value,equals to 0:289) is much smaller than the second one(whose absolute value is equal to 0:957). Therefore,although the degrading effect of a RHP-zero can be movedto a given output (Holt and Morari, 1985), its natural effectis focused on the second output variable. This way, thecontrol of the outlet moisture of the dried product is morelimited than the control of the output temperature of theexhaust air. Therefore, if a tight control on the outletmoisture is imposed, the behavior of the exhaust airtemperature would be strongly degraded.Another important item is the analysis of the singular
values of the system as a function of the frequency. Inparticular, the minimum singular value is useful as acontrollability index. Singular values of the nominal modelare depicted in Fig. 8 and Table 2 shows their directions(see Skogestad and Postlethwaite, 1996) at low frequencies.It can be observed that the minimum singular value issmaller than one for all frequencies. This implies thatindependent output changes cannot be made. In particular,as the output direction of the minimum singular value ismainly in the direction of Mo, some troubles may beexpected if tight control of the outlet moisture is requiredusing the allowed variations of the control variables.
:995� 10�4 � 2:214� 10�4j, �5:522� 10�4
1� 10�3j , 3:333� 10�2, 3:333� 10�2
ARTICLE IN PRESS
10−5 10−4 10−3 10−2 10−1
10−4
10−2
100
mag
nitu
de
frequency (rad/s)
Minimum singular values
Maximum singular values
Fig. 8. Singular values of the nominal model.
Table 2
Directions of the singular values at low frequencies
Singular value Input direction ½F c;Fp�T Output direction ½To;Mo�
T
Maximum ½0:495� 0869�T ½0:997� 0:080�T
Minimum ½�0:869� 0:495�T ½�0:080� 0:997�T
K(s)
z
vu
P(s)ω
Fig. 9. General formulation of the control problem.
M.G. Ortega et al. / Control Engineering Practice 15 (2007) 487–500 493
From Fig. 8 it can be inferred that the condition number
corresponding to the scaled nominal plant is slightly highat low frequencies, and it experiences a significant increasestarting from frequencies around 5� 10�4 rad=s, mainlydue to the drop-off in the minimum singular value at thesefrequencies. Therefore, the system can be considered ill-conditioned from these frequencies on, making it stronglysensitive to uncertainties.
This fact gives an additional approximate lower boundfor the rise time. In this case, this bound is the following:
tr �p
2� 5� 10�443141 s ’ 52 min .
Other factors have been analyzed, like the relative gain
array (RGA) along the frequency, but no other noticeablerestrictions have been found.
5. Controller synthesis
As stated in the Introduction, the main control objectiveof this process is to regulate the moisture percentage ofthe dried product, as well as to control the outputtemperature of the exhaust air. To do this, the wet solidflow and the fuel flow of fuel are used as controlvariables. Therefore, as already mentioned, this constitutesa multivariable control problem, with two inputs and twooutputs.
A centralized multivariable robust controller is pro-posed, taking into account that the system must workproperly at different operating points. It is difficult to findout the way variations in each model parameter affect thesystem outputs. Therefore, it is not reasonable tosynthesize a controller based on parametric uncertainty,
as is usual in very complex systems. Thus, an H1controller, based on unstructured uncertainty, is designedin this section, using the mixed-sensitivity problem ap-proach.The feedback H1 controller design can be formulated as
an optimization problem, which can be posed under thegeneral configuration shown in Fig. 9. In this figure, PðsÞ isthe generalized plant, KðsÞ is the controller, u represents thecontrol signals, v the measured variables, o the exogenoussignals and z stands for the so-called error variables.The optimal H1 control problem with this configuration
consists in computing a controller in such a way that theratio g between the energy of the error vector z and theenergy of the exogenous signals o is minimized.This optimal problem is still open, but a solution exists
for the suboptimal case (see Doyle et al., 1989 for adescription in the continuous time domain and Iglesiasand Glover, 1991 for discrete time). Therefore, the value ofthe energy ratio g is decreased as much as possible bymeans of an iteration procedure. This is the synthesismethod which has been implemented in well-knownsoftware packages such as Balas et al. (1995) or Chiangand Safonov (1998).The configuration used for building up the generalized
plant is given by the S=KS=T mixed sensitivity problem(for example, see Zhou et al., 1996), which is shown inFig. 10. In this case, the expression of the resulting closed-loop transfer function, TzoðsÞ, is as follows:
Fig. 11. W T ðsÞ matrix as an upper bound of the maximum singular values
of the multiplicative output uncertainty.
M.G. Ortega et al. / Control Engineering Practice 15 (2007) 487–500494
where SoðsÞ is the output sensitivity transfer matrix, ToðsÞ isthe output complementary sensitivity transfer matrix, andKðsÞSoðsÞ is the so-called control sensitivity transfer matrix:
SoðsÞ ¼ ðI þ GðsÞKðsÞÞ�1,
KðsÞSoðsÞ ¼ KðsÞðI þ GðsÞKðsÞÞ�1,
ToðsÞ ¼ GðsÞKðsÞðI þ GðsÞKðsÞÞ�1.
The factors W SðsÞ, W KSðsÞ and W T ðsÞ constitute theirrespective weighting matrices, which allow to specify therange of frequencies of relevance for the correspondingclosed-loop transfer matrix.
As it is known, proper shaping of ToðsÞ is desirable fortracking problems, for noise attenuation, and for robuststability with respect to multiplicative output uncertainties.On the other hand, a convenient shaping of SoðsÞ will allowto improve the performance of the system. In addition,matrix W KSðsÞ helps us avoid some numerical problems inthe synthesis algorithms.
Therefore, since the controller is obtained from thegeneralized plant, the synthesis problem with this config-uration is reduced to the design of some appropriateweighting matrices which will impose the control specifica-tions. Based on this, the generalized plant can be built up,and consequently the controller can be calculated on acomputer by using a synthesis algorithm.
The selection of the weighting matrices W SðsÞ and W T ðsÞ
has been accomplished following the design rules fromOrtega and Rubio (2004). Thus, once the scaled nominalmodel is available (see Eq. (1)), the multiplicative outputuncertainty can be estimated as follows:
EoPiðsÞ ¼ ðGPiðsÞ � GðsÞÞGðsÞ�1,
where GðsÞ is the nominal model and GPiðsÞ stands for eachnon-nominal identified model at the extreme operatingpoints. Maximum singular values of these estimateduncertainties are shown in Fig. 11.
Next, matrix W T ðsÞ is designed as a square diagonalmatrix with all its diagonal elements with the same transferfunction, that is
W T ðsÞ ¼W TdiagðsÞI2�2,
where the transfer function W TdiagðsÞ must be stable,
minimum phase, with a high gain at high frequencies,and with magnitude greater than the maximum singularvalue of the uncertainty previously computed, for eachnon-nominal model and frequency, that is,
jW TdiagðjoÞjXsmaxðEoPi
ðjoÞÞ 8o; 8Pi.
In this application, W TdiagðsÞ has been chosen as follows:
W TdiagðsÞ ¼
100sþ 0:01
sþ 0:0125.
The magnitude of this transfer function is plotted inFig. 11. It can be seen that it satisfies all the requirementsimposed on it.Matrix W SðsÞ is taken as a square diagonal matrix of
transfer functions:
W SðsÞ ¼W STo
ðsÞ 0
0 W SMoðsÞ
" #,
where each diagonal element W SiðsÞ is designed with thefollowing expression:
W SiðsÞ ¼aisþ 10ðki�1ÞoT
sþ bi10ðki�1ÞoT
; i ¼ To;Mo,
where oT is the crossover frequency of W TdiagðsÞ (see Fig. 11),
and whose value is about 7:75� 10�5 rad=s. Parameters ai
and bi are the transfer function gains at high and lowfrequencies, respectively. According to the design rulesstated in Ortega and Rubio (2004), the following valueshave been chosen: aTo
¼ aMo¼ 0:5 and bTo
¼ bMo¼ 10�4.
ARTICLE IN PRESSM.G. Ortega et al. / Control Engineering Practice 15 (2007) 487–500 495
Finally, dimensionless parameters kToand kMo
determine thecorresponding transfer function bandwidth, and their valuesmust be higher as the desired response speed of thecorresponding output increases. An initial value equal tozero is recommended, which yields slow and rarely oscillatoryresponses. The final adjustment of these parameters must becarried out on the real plant.
Then, the weighting design is completed after makingweight W KSðsÞ equal to the identity matrix (i.e.W KSðsÞ ¼ I2�2) in order to avoid numerical problems inthe synthesis algorithm.
Once the weighting matrices have been designed, thegeneralized plant (see Fig. 10) can be built up, andtherefore, the controller can be computed. At this point,it is important to remember that the controller has beensynthesized from a scaled model. To figure out thecontroller to be implemented in the real application it isnecessary to carry out a reverse scaling procedure, that is
KðsÞ ¼ DuKðsÞD�1e ,
where matrices De and Du were introduced in Section 4 forthe scaling of the plant.
6. Simulation results
Several tests were carried out on the nonlinear model ofthe plant in order to adjust controller parameters kTo
andkMo
. Fig. 12 shows the responses obtained for a set ofvalues of kTo
and kMo.
0 50 100 150 20035
36
37
38
39
40
41
42
time
To
(o C )
0 50 100 150 2000.95
1
1.05
1.1
1.15
1.2
1.25
time
Mo
( %
)
Controller 2: κTo=3.5 κMo=2.5
Controller 1: κTo=3 κMo=2.5
Cont
Controller 3: κTo=3 κMo
Controller 1: κTo=3 κMo=2.5
Controller 2: κTo=3.5 κMo=
Fig. 12. Simula
A nominal controller (labelled as Controller 1 in Fig. 12)was synthesized using values for kTo
and kMoequal to 3
and 2.5, respectively. It can be observed that these valuesyield an appropriate response for both outputs, with atrade-off between the time responses of To and Mo, andwith no substantial overshoot in any response.Two other controllers were synthesized from slight
variations in the nominal values of these parameters. Oneof them, marked as Controller 2 in Fig. 12, aims to obtain abetter response speed of To by increasing the value of kTo
from 3 to 3.5. It can be observed that, as expected from thecontrollability analysis (see Section 4), an improvement inthe behavior of To does not significantly affect theperformance of Mo. The other one, noted as Controller 3
in Fig. 12, attempts to improve the response speed of Mo
by increasing the value of kMofrom 2.5 to 3. This
implies that the natural degrading effect of the mostrestrictive RHP-zero is moved to the output Mo. In thiscase, as expected from the controllability analysis, thereis a significant worsening of the transient response ofvariable To.Finally, Fig. 13 shows a comparison between the
performance achieved with the previous nominal controllerand that attained by means of a finely tuned multivariablePID controller. A similar performance can be observedin the response of Mo, while the evolution of To is faster(and almost without any overshoots) in the case of theH1 controller. However, implementing a multivariablePID had, in our case, led to an annoying 12-parametertuning procedure, while using the proposed methodology,
250 300 350 400 450 500
(minutes)
250 300 350 400 450 500
(minutes)
roller 3: κTo=3 κMo=3
=3
2.5
tion results.
ARTICLE IN PRESS
0 50 100 150 200 250 300 350 400 450 50035
36
37
38
39
40
41
42
time (minutes)
To
(°C
)
0 50 100 150 200 250 300 350 400 450 5000.95
1
1.05
1.1
1.15
1.2
1.25
time (minutes)
Mo
( %
)Controller 1: κTo=3 κMo=2.5
Controller 1: κTo=3 κMo=2.5
Multivariable PID controller
Multivariable PID controller
Fig. 13. Simulation results.
0 20 40 60 80 100 120 140 160 18030
35
40
45
50
55
time (minutes)
To
(°C
)
0 20 40 60 80 100 120 140 160 1800.3
0.35
0.4
time (minutes)
Mo
(%)
0 20 40 60 80 100 120 140 160 18040
45
50
55
time (minutes)
To
(°C
)
0 20 40 60 80 100 120 140 160 1800.2
0.25
0.3
0.35
0.4
0.45
time (minutes)
Mo
(%)
Fig. 14. Experimental results with Controller 1. Step change in Mo reference (left). Step change in To reference (right).
M.G. Ortega et al. / Control Engineering Practice 15 (2007) 487–500496
only two parameters had to be tuned (once oTdiagis chosen
from Fig. 11) following a few intuitive rules in a systematic way.
7. Experimental results
In this section, step responses of the output variables onthe real plant have been obtained to evaluate theperformance provided by the controllers.
Unlike the previous experiments performed on thesystem model, the experiments reported in this sectionhave been made at non-nominal operating points.The step responses of the real system obtained using the
nominal controller (Controller 1 with kTo¼ 3 and
kMo¼ 2:5) are presented in Fig. 14. From these responses,
two main issues can be pointed out. First, the achieved risetimes are similar to those attained by simulations using thenonlinear model. These times are approximately equal to70 and 100min for To and Mo, respectively. In addition,
ARTICLE IN PRESSM.G. Ortega et al. / Control Engineering Practice 15 (2007) 487–500 497
with this controller, changes at the reference of each outputvariable have no noticeable effect on the other output. Thecorresponding control inputs are plotted in Fig. 15.
Fig. 16 shows the experimental responses obtained bymeans of Controller 3 (with kTo
¼ 3 and kMo¼ 3) under
step change in the reference of Mo. It can be observed thatthe response of Mo is faster (with a rise time about 50min)than the one of Fig. 14, as expected from the increment ofthe value of kMo
. This faster response is achieved by meansof an excessive control effort, which makes the system to
0 20 40 60 80 100 120 140 160 1802
2.22.42.62.8
33.23.43.63.8
4
time (minutes)
Fp
(Kg/
min
)
0 20 40 60 80 100 120 140 160 1802.5
3
3.5
4
time (minutes)
Fc
(Kg/
h)
Fig. 15. Experimental control variables with Controller 1. Step cha
0 10 20 330
35
40
45
50
55
60
65
time
To
(°C
)
0 10 20 30.35
0.4
0.45
0.5
time
Mo
(%)
Fig. 16. Experimental results with Contr
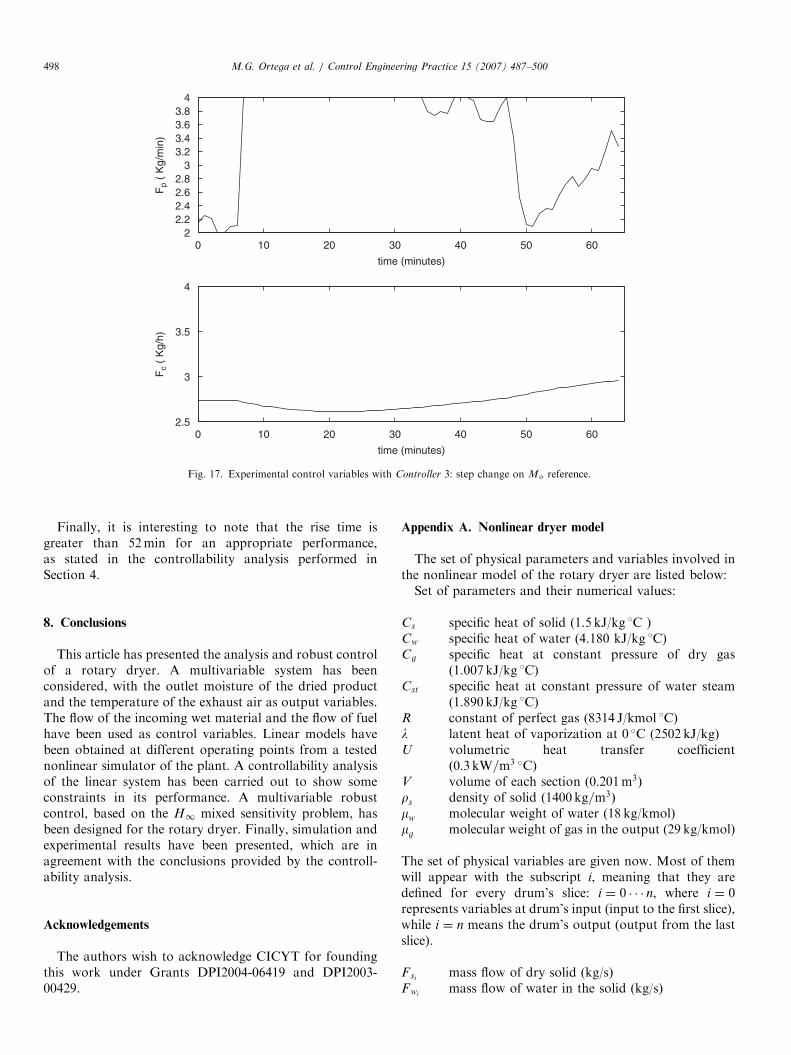
reach its upper saturation level for the Fp control variable(see Fig. 17). Furthermore, it must be pointed out thedegradation of the response of To (more evident than theone corresponding to the simulation experiments) due tothe natural deteriorating effect of the most restrictive RHP-zero (see Section 4).It should also be noticed that in this experiment no
steady-state data have been recorded as the transientperiod of the experiment is long enough to show the maineffects of Controller 3.
0 20 40 60 80 100 120 140 160 1802
2.22.42.62.8
33.23.43.63.8
4
time (minutes)F
p (K
g/m
in)
0 20 40 60 80 100 120 140 160 1802.5
3
3.5
4
time (minutes)
Fc
(Kg/
h)
nge on Mo reference (left). Step change in To reference (right).
0 40 50 60
(minutes)
0 40 50 60
(minutes)
oller 3. Step changeon Mo reference.
ARTICLE IN PRESS
0 10 20 30 40 50 602
2.22.42.62.8
33.23.43.63.8
4
time (minutes)
Fp
( K
g/m
in)
0 10 20 30 40 50 602.5
3
3.5
4
time (minutes)
Fc
( K
g/h)
Fig. 17. Experimental control variables with Controller 3: step change on Mo reference.
M.G. Ortega et al. / Control Engineering Practice 15 (2007) 487–500498
Finally, it is interesting to note that the rise time isgreater than 52min for an appropriate performance,as stated in the controllability analysis performed inSection 4.
8. Conclusions
This article has presented the analysis and robust controlof a rotary dryer. A multivariable system has beenconsidered, with the outlet moisture of the dried productand the temperature of the exhaust air as output variables.The flow of the incoming wet material and the flow of fuelhave been used as control variables. Linear models havebeen obtained at different operating points from a testednonlinear simulator of the plant. A controllability analysisof the linear system has been carried out to show someconstraints in its performance. A multivariable robustcontrol, based on the H1 mixed sensitivity problem, hasbeen designed for the rotary dryer. Finally, simulation andexperimental results have been presented, which are inagreement with the conclusions provided by the controll-ability analysis.
Acknowledgements
The authors wish to acknowledge CICYT for foundingthis work under Grants DPI2004-06419 and DPI2003-00429.
Appendix A. Nonlinear dryer model
The set of physical parameters and variables involved inthe nonlinear model of the rotary dryer are listed below:Set of parameters and their numerical values:
Cs specific heat of solid (1.5 kJ/kg 1C )Cw specific heat of water (4.180 kJ/kg 1C)Cg specific heat at constant pressure of dry gas
(1.007 kJ/kg 1C)Cst specific heat at constant pressure of water steam
(1.890 kJ/kg 1C)R constant of perfect gas (8314 J/kmol 1C)l latent heat of vaporization at 0 �C (2502 kJ/kg)U volumetric heat transfer coefficient
ð0:3 kW=m3 �CÞV volume of each section ð0:201m3Þ
rs density of solid ð1400 kg=m3Þ
mw molecular weight of water (18 kg/kmol)mg molecular weight of gas in the output (29 kg/kmol)
The set of physical variables are given now. Most of themwill appear with the subscript i, meaning that they aredefined for every drum’s slice: i ¼ 0 n, where i ¼ 0represents variables at drum’s input (input to the first slice),while i ¼ n means the drum’s output (output from the lastslice).
Fsimass flow of dry solid (kg/s)
Fwimass flow of water in the solid (kg/s)
ARTICLE IN PRESSM.G. Ortega et al. / Control Engineering Practice 15 (2007) 487–500 499
Fgimass flow of dry gas (kg/s)
Fstimass flow of steam in the gas (kg/s)
msimass of dry solid (kg)
mwimass of water in the solid (kg)
mgimass of dry gas (kg)
mstimass of steam in the gas (kg)
Tsitemperature of solid (1C)
Tgitemperature of gas (1C)
X i moisture of solid in dry basis (kg water/kg drysolid)
Y i humidity of gas in dry basis (kg water/kg dry gas)Mi moisture of solid in wet basis (kg water/kg wet
solid)W i mass flow of evaporated water (kg/s)hsti
steam enthalpy (kJ)vvapi
vaporization speed (1/s)P gas pressure (Pa)
In order to determine typical operation points for thesevariables, the relations of the system inputs (F c and Fp)and outputs (To and Mo) with some of them have to beconsidered:
Fp ¼ F s0 þ Fw0� 0:05 kg=s,
To ¼ Tgn� 37 �C,
Mo ¼Mn � 0:01.
The set of equations relating these variables and para-meters are given next:
�
Dry solid balance (msiand F si
are unknowns):
qmsi
qt¼ Fsi�1
� F si.
�
Water balance in solid and gas (where mwi, Fwi
, msti, F sti
and W i are unknowns):
qmwi
qt¼ F wi�1
� Fwi�W i,
qmsti
qt¼ Fsti�1
� F stiþW i.
�
Dry gas balance:
qmgi
qt¼ Fgi�1
� F gi.
�
Energy balance in solid (the overall heat transfercoefficient is known):
q½ðCsmsiþ Cwmwi
ÞTsi�1�
qt¼ UV ðTgi
� TsiÞ
þ ðF si�1Cs þ Fwi�1
CwÞTsi�1
� ðF siCs þ Fwi
CwÞTsi�W ihsti
.
Considering that the enthalpy of the vaporized water is
hsti¼ CwTsi
þ lTsi¼ CstTsi
þ l
and using the previous mass balance equations in thesolid:
ðCsmsiþ Cwmwi
ÞqTsi
qt¼ UV ðTgi
� TsiÞ
þ ðF si�1Cs þ F wi�1
CwÞðTsi�1� Tsi
Þ
�W i½ðCst � CwÞTsiþ l�.
�
The mass balance equation of the gas:
ðCstmstiþ Cgmgi
ÞqTgi
qt¼ �UV ðTgi
� TsiÞ
þ ðFgi�1Cg þ Fsti�1
CstÞðTgi�1� Tgi
Þ �W iCstðTgi� Tsi
Þ.
�
There are also other static equations as the unknownfactors relate to one another. It is clear that:
X i ¼Fwi
F si
; X i ¼mwi
msi
,
Y i ¼Fsti
F gi
; Y i ¼msti
mgi
,
Mi ¼X i
1þ X i
.
�
The other static equations are given by the relationbetween the mass of dry gas and the mass of dry solid,which can be expressed as
mgi¼ V �
msi
rs
� �mgmw
mgY i þ mw
P
RðTgiþ 273Þ
.
�
The relation involving the vaporization speed of thesolid:
W i ¼ vvapmsi.
�
Finally, the equation that links mass and flow ofdry solid, using the concept of residence time, thatis, the mean time employed by the solid to cross thedrum:
msi¼ tresFsi
.
This time has been estimated through a correlationproposed in Saeman and Mitchell (1954), as a value ofapproximately 25min.
Therefore, it can be observed that there are 13 equationsand 13 unknowns.On the other hand, the dynamics of the combustion
system is quite fast compared to the drum’s dynamics.
ARTICLE IN PRESSM.G. Ortega et al. / Control Engineering Practice 15 (2007) 487–500500
A number of new parameters and variables appear. The listof parameters is:
Hcomb combustible heating power (39083 kJ/kg comb.)Zcomb combustion performance (0.95)Cgenv specific heat of inlet air (1.006 kJ/kg 1C)
The variables involved in the combustion model are:
Tenv input temperature (1C)Y env input humidity (kg water/kg dry air)Fgenv mass flow of inlet dry air (kg dry air/s)Tg0 output temperature from the combustion stage
(input to the first drum’s slice, i ¼ 0) (1C)Y 0 humidity of combustion gas (kg steam/kg dry gas)Fg0 mass flow of dry air from the combustion section
(input to the first drum’s slice) (kg dry gas/s)Qg0
flow of dry gas from the combustion sectionðm3=sÞ
F comb mass flow of combustible (equal to controlvariable Fc, but time units are seconds) (kg/s)
Pat atmospheric pressure (Pa)
Again some of these variables of the input and outputsignals are related. In particular, in this case it can bewritten as
F c ¼ F comb � 0:00072 kg=s.
The new set of equations, governing the combustionprocess is:
�
Gas balance:
Fg0 ¼ Fgenv þ F comb.
�
Energy balance:
FgenvCgenvT env þ F combHcombZcomb ¼ CgTg0F g0 .
�
Equation of perfect gas:
Fg0 ¼Qg0
mgPat
RðTg0 þ 273Þ.
�
Humidity of gas:
Y 0 ¼ Y env.
References
Arjona, R., Ollero, P., & Vidal, F. (2005). Automation of an olive waste
industrial rotary dryer. Journal of Food Engineering, 68, 239–247.
Astrom, K. J. (2000). Limitations on control system performance.
European Journal of Control, 6, 2–20.
Balas, G., Doyle, J., Glover, K., Packard, A., & Smith, R. (1995).
m-Analysis and synthesis toolbox user’s guide (2nd ed.). Natick, MA:
The MathWorks Inc.
Brasil, G. C. & Seckler, M. M. (1988). A model for the rotary drying of
granular fertilizers. Proceeding sixth international drying symposium,
pp. 247–256.
Camacho, E. F., & Bordons, C. (1995). Model predictive control in the
process industry. London: Springer.
Chiang, R., & Safonov, M. (1998). Robust control toolbox user’s guide
(2nd ed.). Natick: The MathWorks Inc.
Courtois, F. (1997). Automatic control of drying processes. Computerized
Control of Systems in the Food Industry, 295–316.
Deich, V. G., & Stalskii, V. V. (1975). Optimum control of drying
processes in a rotary drum dryer. Theoretical Foundations of Chemical
Engineering, 9(1), 85–90.
Didriksen, H. (2002). Model based predictive control of a rotary dryer.
Chemical Engineering Journal, 86, 53–60.
Douglas, P. L., Kwade, A., Lee, P. L., & Mallick, S. K. (1993). Simulation
of a rotary dryer for sugar crystalline. Drying Technology, 11(1),
129–155.
Doyle, J. C., Glover, K., Khargonekar, P., & Francis, B. (1989). State-
space solutions to standard H2 and H1 control problems. IEEE
Transactions on Automatic Control, 34(8), 831–847.
Duchesne, C., Thibault, L., & Bazin, C. (1997). Modelling and dynamic
simulation of an industrial rotary dryer. Developments in Chemical
Engineering & Mineral Processing, 5(3/4), 155–182.
Holt, B. R., & Morari, M. (1985). Design of resilient processing plants
VI—the effect of right-half-plane zeros on dynamic resilience.
Chemical Engineering Science, 40, 59–74.
Iglesias, P., & Glover, K. (1991). State-space approach to discrete-time
H1 control. International Journal of Control, 54(5), 1031–1073.
Ljung, L. (1986). System identification toolbox. The Math Works, Inc.
Ortega, M. G., & Rubio, F. R. (2004). Systematic design of weighting
matrices for H1 mixed sensitivity problem. Journal of Process Control,
14(1), 89–98.
Reay, D. (1979). Theory in the design of dryers. Chemical Engineering,
501–506.
Rubio, F. R., Bordons, C., Holgado, J., & Arjona, R. (2000). Modelling
and PID control of a rotary dryer. Proceedings of PID’2000.
Rubio, F. R., Bordons, C., Holgado, J., Rivas, I. S. (2001). Modelling and
H1 control of a rotary dryer. Proceedings of European control
conference, Oporto, Portugal.
Saeman, W. C., & Mitchell, J. R. (1954). Analysis of rotary dryer and
cooler performance. Chemical Engineering Progress, 59(9), 467–475.
Savaresi, S. M., Bitmead, R. R., & Peirce, R. (2001). On modelling and
control of a rotary sugar dryer. Control Engineering Practice, 9,
249–266.
Skogestad, S., & Postlethwaite, I. (1996). Multivariable feedback control.
analysis and design. New York: Wiley.
Yliniemi, L. (1999). Advanced control of a rotary dryer. Ph.D. thesis,
University of Oulu.
Zhou, K., Doyle, J. C., & Glover, K. (1996). Robust and optimal control.