25
Nature of Roots
| Date post: | 01-Jan-2016 |
| Category: |
Documents |
| Upload: | kameko-mckenzie |
| View: | 38 times |
| Download: | 0 times |

Nature of Roots

Nature of Roots
> 0 Two unequal real roots
= 0 One double real root
(Two equal real roots)
< 0 No real roots
Note:
0 Real roots
Quadratic Equation: ax2 + bx + c = 0 ; a 0
Discriminant = = b2 – 4ac

Transformation of a graph

TranslationThe original graph is y = f(x) . Let h, k > 0 .
Graph Transformation Description
y = f(x) + k Translation along the y-axis
The graph y = f(x) + k is obtained by translating the graph of y = f(x) k units upwards.
y = f(x) k Translation along the y-axis
The graph y = f(x) k is obtained by translating the graph of y = f(x) k units downwards.
y = f(x – h) Translation along the x-axis
The graph y = f(x – h) is obtained by translating the graph of y = f(x) h units to the right.
y = f(x + h) Translation along the x-axis
The graph y = f(x + h) is obtained by translating the graph of y = f(x) h units to the left.

TranslationExamples
Graph Transformation Description
y = f(x) + 3 Translation along the y-axis
The graph y = f(x) + 3 is obtained by translating the graph of y = f(x) 3 units upwards.
y = f(x) 3 Translation along the y-axis
The graph y = f(x) 3 is obtained by translating the graph of y = f(x) 3 units downwards.
y = f(x – 2) Translation along the x-axis
The graph y = f(x – 2) is obtained by translating the graph of y = f(x) 2 units to the right.
y = f(x + 2) Translation along the x-axis
The graph y = f(x + 2) is obtained by translating the graph of y = f(x) 2 units to the left.

ReflectionThe original graph is y = f(x) .
Graph Transformation Description
y = f(x) Reflection about the y-axis
The graph y = f(x) is obtained by reflecting the graph of
y = f(x) about the y-axis.
y = f(x) Reflection about the x-axis
The graph y = f(x) is obtained by reflecting the graph of
y = f(x) about the x-axis.

ReflectionExamples
Graph Transformation Description
y = 2x Reflection about the y-axis
The graph y = 2x is obtained by reflecting the graph of
y = 2x about the y-axis.
y = 2x Reflection about the x-axis
The graph y = 2x is obtained by reflecting the graph of
y = 2x about the x-axis.

Enlargement and ReductionThe original graph is y = f(x) .
Graph Transformation Description
y = kf(x) ,
k > 1
Enlargement along the y-axis
The graph of y = kf(x) is obtained by enlarging to k times the graph of y = f(x) along the y-axis.
y = kf(x) ,
k < 1
Reduction along the y-axis
The graph of y = kf(x) is obtained by reducing to k of the graph of y = f(x) along the y-axis.
y = f(kx) ,
k > 1
Reduction along the x-axis
The graph of y = f(kx) is obtained by reducing to 1/k of the graph of y = f(x) along the x-axis.
y = f(kx) ,
k < 1
Enlargement along the x-axis
The graph of y = f(kx) is obtained by enlarging to 1/k times of the graph of y = f(x) along the x-axis.

Enlargement and ReductionExamples
Graph Transformation Description
y = 2f(x) Enlargement along the y-axis
The graph of y = 2f(x) is obtained by enlarging to 2 times the graph of y = f(x) along the y-axis.
y = f(x) Reduction along the y-axis
The graph of y = f(x) is obtained by reducing to 1/2 of the graph of y = f(x) along the y-axis.
y = f(2x) Reduction along the x-axis
The graph of y = f(2x) is obtained by reducing to 1/2 of the graph of y = f(x) along the x-axis.
y = f( x) Enlargement along the x-axis
The graph of y = f( x) is obtained by enlarging to 2 times of the graph of y = f(x) along the x-axis.
2
12
1
2
12
1

Trigonometric Functions

Trigonometric Functions of Special Angles (I)
0 30 45 60 90
sin 0 1
cos 1 0
tan 0 1 undefined
2
1
2
1
2
3
2
3
3
33
2
2
2
2
2 230
1
60
3
12
45
1
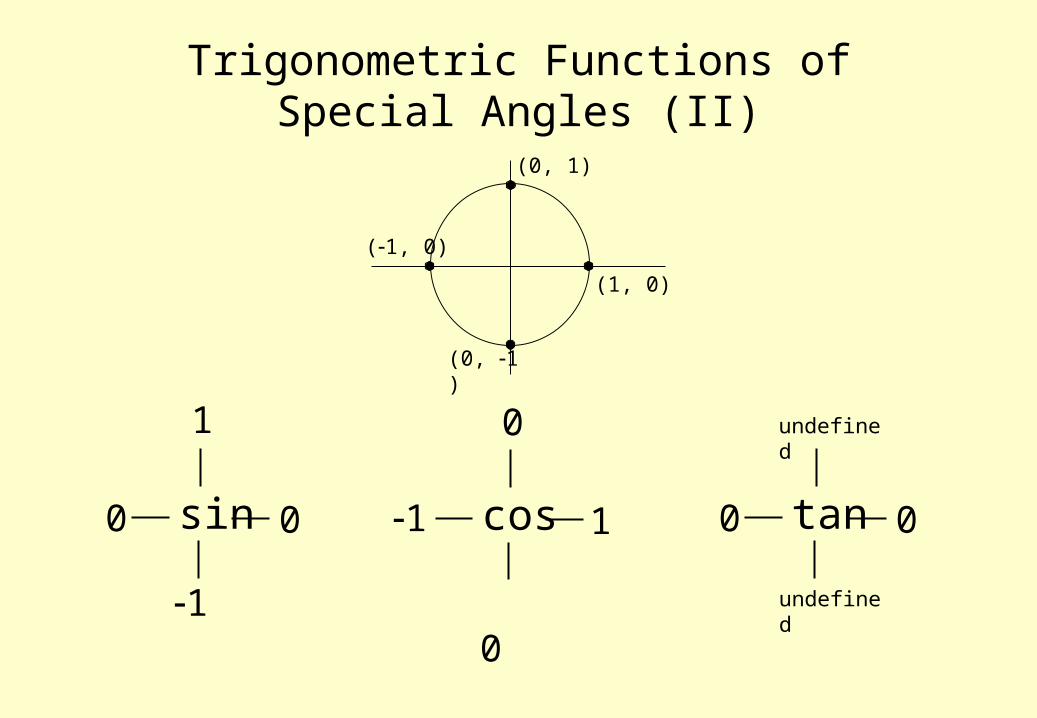
Trigonometric Functions of Special Angles (II)
(1, 0)
(0, 1)
(1, 0)
(0, 1)
sin 00
1
1
cos 11
0
0
tan 00
undefined
undefined

Trigonometric Functions of General Angles (I)
A
CT
SIVIIIIII

Trigonometric Functions of General Angles (II)
90 180 180+ 360 360+
sin cos sin sin sin sin
cos sin cos cos cos cos
tan tan tan tan tanθtan
1

Nets of a cube

Nets of a cube
Two nets are identical if one can be obtained from the other from rotation (turn it round) or/and reflection (turn it over).
An example of identical nets.

There are a total of 11 different nets of a cube as shown. Nets of a cube

Planes of Reflection

Planes of Reflection of a Cube

Planes of Reflection of a Regular Tetrahedron

Axes of Rotation

Axes of Rotation of a Cube
order of rotational symmetry = 2
order of rotational symmetry = 3
order of rotational symmetry = 4

Axes of Rotation of a Regular Tetrahedron
order of rotational symmetry = 3
order of rotational symmetry = 2

Compare Slopes of Different Lines

0 < m5 < 1
1 < m3 < 0
x
m6 = 1 ( = 45)
undefined slope
m4 = 0
m1 < 1
m2 = 1 ( = 135)
m7 > 1
m1 < m2 < m3 < m4 < m5 < m6 < m7

















