80
i Remote Image Surveillance Instrument

i
Remote Image Surveillance Instrument

ii

iii
Keil uVision3

iv

v
Abstract
In recent year, the surveillance system is developed maturely. In addition to
offices, the surveillance system also can apply to guard against burglary and fire in
families. The community always can find remote monitors. Taiwan Area National
Freeway Bureau also sets up the surveillance system to control driving situations
immediately. House agency gives customs service that is customs can inspect houses
on-line.
This research can divide into two parts, one is how to control camera, the other is
how to make system-on-a-chip in computer.On the one hand, we use 8051 circuit and
server motor to control camera,which low-price and feed back rule make more
precision to control camera.It uses two server motors to control four directions, the
sphere of camera activities is more spacious than closed-circuit television.On the
other hand, we can make system-on-a-chip by Visual Basic6, it has graphical user
interface and make directly use of program.
When it comes to camera on the market,one has function for webcam,which
price ranges between NT3000 and NT8000. Besides, it has to set up wirelesslan.When
we want to use common camera to store data,we have to buy storage. The other
example, when we buy a common camera,we need to monitor remote monitoring by
third party software, but it also can have danger of personal data leakage. We use
8051 to make a camera platform,it not only reduce cost but also doesn’t set up
wirelesslan. Because camera platform connects to computer directly, computer’s
network bandwidth can supply to it and prevents personal data leakage.
Keywords:Remote monitoring Webcam

vi
Abstract
2
2
3
8051 RS 232 6
17
17
Keil uVision
Visual Basic
vii
22
28
41
47
TCP/IP

viii
ix
x
1
8051 8051 Visual
Basic 8051
2
(Single chip microcomputer One-chip)
-
:
1. :
2. :
3. :
4. :
(I/O port)
5. :
6. :
IC
1993
Java Java

3
8051
8051 ATMEL AT89C51
AT89C51 PIC AT89C51
ISP( ) ISP 8051
AT89S51 AT89C51 AT89S51
ATMEL
AT89C51 AT89S51 AT89S51
89SXX 89CXX 8051
89S51 89C51 :
ISP
33MHz 89C51
24MHz 89S51 UART
51
[1]
; ;

4
;
0
2.1 ( )
2.2 ( )

5
4V 6V
1ms
- 5 20ms
20ms
2.1

6
5V
90 128
0o - 90
“ / “
( )
±90°
( )
( C)
8051 RS 232
2.3 ( )

7
CPU CPU CPU
Universal Asynchronous Receiver Transmitter
UART
8 UART
8 8
8 10 UART
UART 0 1
1
1 0
8 8
1
(Buat Rate)
UART 1200 2400 4800 9600 19200
2.4 UART

8
UART
8051 UART 8051 UART
8051 P3.0
(RXD) P3.1 (TXD) (Special
Function Register SFR) (Serial Port Buffer SBUF)
SBUF
SBUF 8051 UART
8051
8051
8051
SBUF
SBUF
UART
UART
SFR UART
(Serial Port Control register SCON) (Power Control
register PCON)

9
SM0 SM1
(Serial Port Control Register SCON)
:98H
SM2 REN TB8 RB8 TI RI
SM0 SM1: SM0SM1=00 0
SM0SM1=01 1 8 UART
SM0SM1=10 2 9 UART
SM0SM1=11 3 9 UART
SM2: 0 0
1 SM2=1
RI=1 RI=0
2 3 SM2=1 9
RB8=1 RI=1 RB8=0
RI=0
REN: REN=1
REN=0
TB8: 9 2 3 9
RB8: 9 2 3 9
TI:
RI:
2.2

10
UART
SCON SCON
PCON SMOD
SCON SM0 SM1
1. 0 SM1 SM0 1
0 RXD
TXD 8051
1/12 SBUF
8051CPU SCON TI 1
SCON REN
RI
8051CPU SCON 1
(Power Control Register PCON)
:87H
SMO GF1 GF0 PD IDL
SMOD: SMOD=1
SMOD=0
GF1:
GF0:
PD: PD=1
2.3

11
0 I/O RXD TXD
(PISO) IC 8 RXD TXD
(SIPO) IC 8
2. 1 SM1 1 SM0 0
1 8051CPU 10 10
3
(1) 0
(2) 8
(3) 1
1 Timer 1

12
8051CPU SBUF
CPU SCON TI
RXD 1 0 CPU 10bit
CPU RI SM2
(1)RI 0
(2)SM2 0 1
8051CPU 8 SBUF
SCON RB8 RI 1
Timer1
SMOD C/T
0 ( 1M) 12M Hz × × × ×
2 ( 375K) 12M Hz 1 × × ×
1 3 ( 62.5K) 12M Hz 1 0 2 FFH
19200 11.0592M Hz 1 0 2 FDH
9600 11.0592M Hz 0 0 2 FDH
4800 11.0592M Hz 0 0 2 FAH
2400 11.0592M Hz 0 0 2 F4H
1200 11.0592M Hz 0 0 2 E8H
137.5 11.0592M Hz 0 0 2 1DH
110 6M Hz 0 0 2 72H
110 12M Hz 0 0 1 FEEBH
2.4

13
3. 2 SM1 0 SM0 1
2 8051CPU 11 11
4
(1) 0
(2) 8
(3) (TB8 RB8)
(4) 1
2 SMOD SMOD 0 375K Hz
SMOD 1 187.5K Hz SCON
TB8 SBUF
TB8
8051CPU SCON TI
RXD 1 0 8051CPU
11 CPU RI SM2
(1)RI 0
(2)SM2 0 1
8051CPU 8 SBUF
SCON RB8 RI 1
4. 3 SM1 1 SM0 1
3 2 3
1 Timer1

14
1 3 Timer
(1) Timer1 TH1 TL1(UART 0
2 )
(2) SMOD 0 1
(3) RI TI 0 REN 1
(4)
(5) Timer1 (UART 0 2 )
(6) MOV SBUF XX UART [2]
RS232
(serial) (parallel)
A Byte B
8 bits 8 clock
8 1 bit 1 clock 8 bits
2.5

15
RS232 1.6 1.5 RS-232 9
RS-232
RS-232
UART(Universal Asynchronous Receiver Transmitter)
2.6 RS-232
Pin1 CD (Carrier Detect)
Pin2 RXD (Receive)
Pin3 TXD (Transmit)
Pin4 DTR (Data Terminal Ready)
Pin5 GND (Ground)
Pin6 DSR (Data Set Ready)
Pin7 RTS (Request To Send)
Pin8 CTS (Clear To Send)
Pin9 RI (Ring Indicator)
2.5

16
SPI IC
3 11001010
Start(Low) Stop(High)
11001010 Byte 10 clock
Start Stop 1 1.5 2
RS-232
RS-232
8 RS-232
5~8
4.3
bits
bit “
bits” “Baud Rate ” Baud Rate=9600
9600 [3]
8
(ASCII) 7 7
RS-232 8
(Parity) 1
2.7 RS-232

17
(Odd Parity) (Even Parity)
8
(Non Parity)
RS-232 “9600, N, 8, 1”
Baud Rate 9600 8 “1”
1
89C51 TTL
RS232 RS232
RS232 IC MAX232
PC
MAX232
MAX232 IC TTL RS-232
555 DC-DC MAX232 IC
+5V
( ) CPU CPU
”0” ”1”
8051 24H(
00100100B)
”ADD A #data”

18
( C)
C
C
CPU C
8051 KEIL. IAR
2.8

19
CPU
( )
C
[4]
PC COM1
PC COM1
VP51
89S51
89S51
40PIN IO51
8051
IO51
8051
LO51 89S51
8051 KEIL C
IO51
89S51
1.9 8051
20
Keil uVision3
Visual Basic
Basic “ ” Basic Beginner’s All-purpose
Symbolic Instruction Code “
” Dartmouth John G.Kemeny Thomas E.Kurtz
BASIC
64KB
BASIC
1988 Quick BASIC 4.5( QB) QB
Windows (graphic user
interface GUI) Visual Basic( VB) Basic 1991
Windows Basic GWBASIC
QBASIC DOS VB
Visual Basic Visual
BASIC
What You See is What you Get WYSWYG
VB
(Integrated
Develop Environment,IDE)

21
VB :
1.
2.
3.
4.
5.
6.
7. Active X
8. Access Dbase SQL
9. (Dynamic HTML)
10. Windows IIS
11. (Personal Digital Assistant,PDA) Windows CE
[5]

22
8051 8051
8051
rs232 A A
8051
A
TU:
JB P2.3,TD
TUA:
CALL UP ; ( )
JNB P2.3,TUA
” ”
8051 2.3 2.3 0 1 8051
8051 8051
1 8051 UP UP
” ”
;
UP:
MOV A,4EH
CJNE A,#70,IR_D2 ;4BH 70 IR_D2

23
JMP IR_D3 ; IR_D3 1
IR_D2:
DEC 4EH ; 1
IR_D3:
MOV 4FH,4EH
MOV 3EH,#2 ;PWM =2
CALL PLOOP2 ; Y
RET
8051
1
” ”

24
RS232
RS232
40H=1
40H=2
40H=3
40H=4
40H=5
40H=6
40H=7
40H=8
A
15 40H=0
15 40H=0
15 40H=0
15 40H=0
B
3.1 ( )

25
( ) 8051 ”
” ” ” ”15 ” ”
” rs232 ”U” 8051 ”U” 8051
”SBUF” 8051
”15 ” ”u” 8051
:
Private Sub Command1_MouseDown(Button As Integer, Shift As Integer, x As
Single, y As Single) '
If Option1.Value = True Then '
Comm1.Output = "U" ' U 8051
Else
End If
If Option2.Value = True Then ' 15
Comm1.Output = "u" ' u 8051
Else
End If
End Sub
8051 ”U” ”u” 8051
”U” 1 8051 ”
” ”u” 5 8051 ”
15 ” 8051 15 :

26
;
UP:
MOV A,4EH
CJNE A,#70,IR_D2 ;4BH 70 IR_D2
JMP IR_D3 ; IR_D3 1
IR_D2:
DEC 4EH ; 1
IR_D3:
MOV 4FH,4EH
MOV 3EH,#2 ;PWM =2
CALL PLOOP2 ; Y
RET
; 15
UP2:
MOV A,4EH
CJNE A,#70,ID2 ;4BH 70 ID2
JMP ID3 ; ID3 15
ID2:
CLR C
MOV A,4EH
SUBB A,#15 ; 15
MOV 4EH,A
ID3:
MOV 4FH,4EH
MOV 3EH,#20 ;PWM =20
CALL PLOOP2 ; Y

27
RET

28
Winsock Internet Winsock
Winsock
Winsock :
TCP : Internet Intranet
UDP : Internet
Winsock
Winsock :
BytesReceived
GetData
BytesReceived
BytesReceived :
= Winsock1.BytesReceived
LocalHostName
LocalHostName
LocalHostName

29
LocalHostName :
= Winsock1.LocalHostName
LocalIP
LocalIP
LocalIP
:
= Winsock1.LocalIP
LocalPort
LocalPort
0~65535
0
LocalPort :
LocalPort
Winsock1. LocalPort =
LocalPort
= Winsock1.LocalPort
Protocol
Winsock Protocol TCP
UDP Protocol :
Protocol
Winsock1. Protocol [ =Protocol]
Protocol
= Winsock1. Protocol

30
Protocol :
TCP : sckTCPProtocol 0
UDP : sckUDPProtocol 1
RemoteHost
DNS ( :ns1.colins.idv.tw) IP ( :192.168.1.1) RemoteHost
:
RemoteHost
Winsock1. RemoteHost =
RemoteHost
= Winsock1. RemoteHost
RemoteHostIP
IP RemoteHostIP
:
RemoteHostIP
Winsock1. RemoteHostIP =
RemoteHostIP
= Winsock1.RemoteHostIP
RemotePort
RemotePort ActiveX
80
RemotePort
Winsock1. RemotePort = port

31
RemotePort
= Winsock1.RemotePort
State
State
State :
State
= Winsock1.State
State :
sckClosed 0
sckOpen 1
sckListening 2
sckConnectionPending 3
sckResolvingHost 4
sckHostResolved 5
sckConnecting 6
sckConnected 7
sckClosing 8
sckError 9
Winsock :
3.1 State

32
Accept
TCP Accept
ConnectionRequest Accept :
Winsock1.Accept requested
Bind
UDP UDP IP
Winsock1.Bind LocalPort,LocalIP
Close
Close TCP Socket
Close :
Winsock1.Close
Connect
Winsock Connect Winsock
Connect :
Winsock1.Connect()
GetData
GetData Variant
Winsock GetData
:
Winsock1.GetData data, [type,] [maxLen]

33
data type maxLen :
Data: data
Empty
Type: ”data ”
maxLen:
data :
Byte VbByte
Integer VbInteger
Long vbLong
Single vbSingle
Double vbDouble
Currency vbCurrency
Date vbDate
Boolean vbBoolean
SCODE vbSCODE
String vbString
Byte Array vbArray + vbByte
Listen
TCP Listen Socket
3.2 data

34
Listen :
Winsock1.Listen
PeekData
PeekData GetData PeekData
TCP :
Winsock1.PeekData data, [type,] [maxLen]
PeekData :
Data: data
Empty
Type: ”data ”
maxLen:
data :
Byte VbByte
Integer VbInteger
Long vbLong
Single vbSingle
Double vbDouble
Currency vbCurrency
Date vbDate
35
Boolean vbBoolean
SCODE vbSCODE
String vbString
Byte Array vbArray + vbByte
SendData
SendData SendData :
Winsock1.SendData data
data
:
: BMP JPG GIF TIF…
: EXE COM…
: DLL
Winsock :
Close
Close
TCP
Private Sub Winsock1_Close()
End Sub
Connect
Connect Connect
36
:
Private Sub Winsock1.Connect(ErrorOccurred As Boolean)
End Sub
Connect ErrorOccurred
ErrorOccurred :
True:
False:
ConnectionRequest
ConnectionRequest TCP
ConnectionRequest ConnectionRequest
RemoteHostIP RemotePort
ConnectionRequest :
Private Sub Winsock1_ConnectionRequest (ByVal requested As Long)
End Sub
requestID
:
Private Sub Winsock1_ConnectionRequest (ByVal requested As Long)
Accept
Accept
Winsock1.Accept requested
End Sub

37
DataArrival
Winsock
DataArrival DataArrival :
Private Sub Winsock1_DataArrival (ByVal bytesTotal As Long)
End Sub
DataArrival bytesTotal
–
Error
Winsock Error Error
:
Private Sub Winsock1_Error( _
ByVal Number As Integer, Description As String, _
ByVal Scode As Long, ByVal Source As String, _
ByVal HelpFile As String, ByVal HelpContext As Long, _
CancelDisplay As Boolean)
End Sub
Error :
number:
description:
Scode:SCODE
Source:

38
HelpFile:
HelpContext:Help
Winsock TCP
Winsock Protocol sckTCPProtocol
TCP TCP
TCP :
Winsock (UDP)
UDP
UDP
NetBIOS NetBIOS
(SNMP) UDP UDP
:a :a
RemotePort LocalPort
3.3 TCP

39
UDP :
UDP
UDP
UDP Checksum UDP UDP
UDP IP UDP
TCP UDP
UDP :
15 NETSTAT
53 DNS
69 TFTP
137 NetBIOS
138 NetBIOS
161 SNMP
Winsock Protocol sckUDPProtocol
UDP UDP
3.5 UDP
3.4 UDP

40
RemotePort LocalPort
UDP [6]:
:a2 :a1
B A
b2 b1
a2 a1
=RemotePort
=LocalPort
3.4 UDP

41
8051
R110K
P3.5
P0.7
C4
30PF
P3.2
+5V
P1.3
P0.6
+5V
P3.0
P1.2
P2.5
P2.1
P0.4
P1.4
P2.7
P2.0
P0.5
P2.3P3.4
P1.5
P2.2
P3.6
+C710uF/25V
C6
30PF
P1.1P3.7
P1.7
P0.2
P1.6 P3.1
P1.0
P0.1
P2.6
P3.3
U2
80C51
31
19
18
9
12131415
12345678
3938373635343332
2122232425262728
171629301110
20
40
EA/VPP
XTAL1
XTAL2
RESET
P3.2_INT0P3.3_INT1P3.4_T0P3.5_T1
P1.0P1.1P1.2P1.3P1.4P1.5P1.6P1.7
P0.0P0.1P0.2P0.3P0.4P0.5P0.6P0.7
P2.0P2.1P2.2P2.3P2.4P2.5P2.6P2.7
P3.7_RDP3.6_WR
PSENALE/PROG
P3.1_TXDP3.0_RXD
GND
VCC
Y1
12MHZ
P2.4
P0.0
P0.3
8051 8051
8051

42
J1POWER
1
2
+9V
GND C9104
+9V +5V
+C8
220uF/16V
U3
78M051
2
3VOUT
GN
D
VIN
IC 78M05 IC input:7V~20V
output:4.75V~5.25V 5V
RS232
C1
22uF
C3 22uF
P3.0
C2 22uF
+5V
C5 22uF
U1
MAX232
134526
129
1110
138
147
C1+C1-C2+C2-V+V-
R1OUTR2OUT
T1INT2IN
R1INR2IN
T1OUTT2OUT
P3.1
P1CONNECTOR DB9
5 9 4 8 3 7 2 6 1
RS232 MAX232 RS232 8051 IC
RS232
IC

43
P1.0
P1.1+5V
+5V
MG2
X
123
MG1
Y
123

44
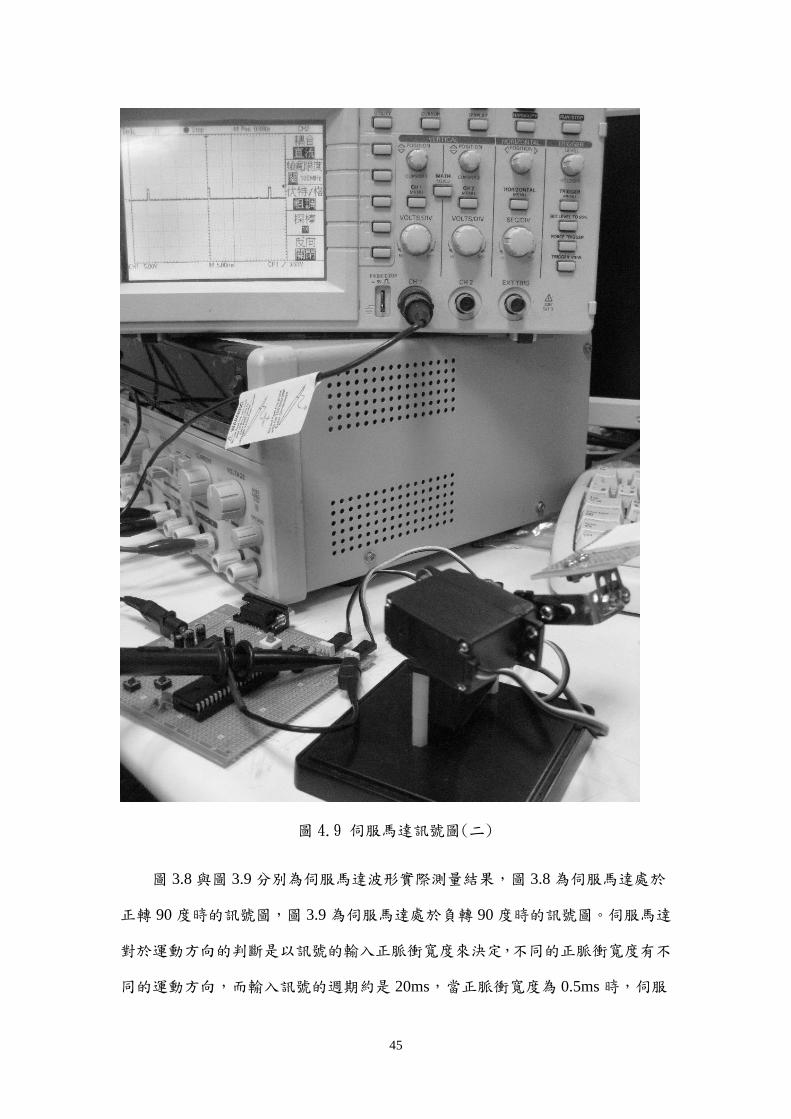
45
3.8 3.9 3.8
90 3.9 90
20ms 0.5ms

46
90
2.5ms 90
0.5ms 2.5ms
90 90 8051
0.5ms 0.15ms
15
1 4 C1,C2,C3,C5 22uF
2 2 C6,C4 30PF
3 1 C7 10uF/25V
4 1 C8 220uF/16V
5 1 C9 104
6 1 J1
7 1 MG1 Y
8 1 MG2 X
9 1 P1 rs232
10 1 R1 10K
11 1 U1 MAX232
12 1 U2 80C51
13 1 U3 78M05
14 1 Y1 12MHZ
4.1
47
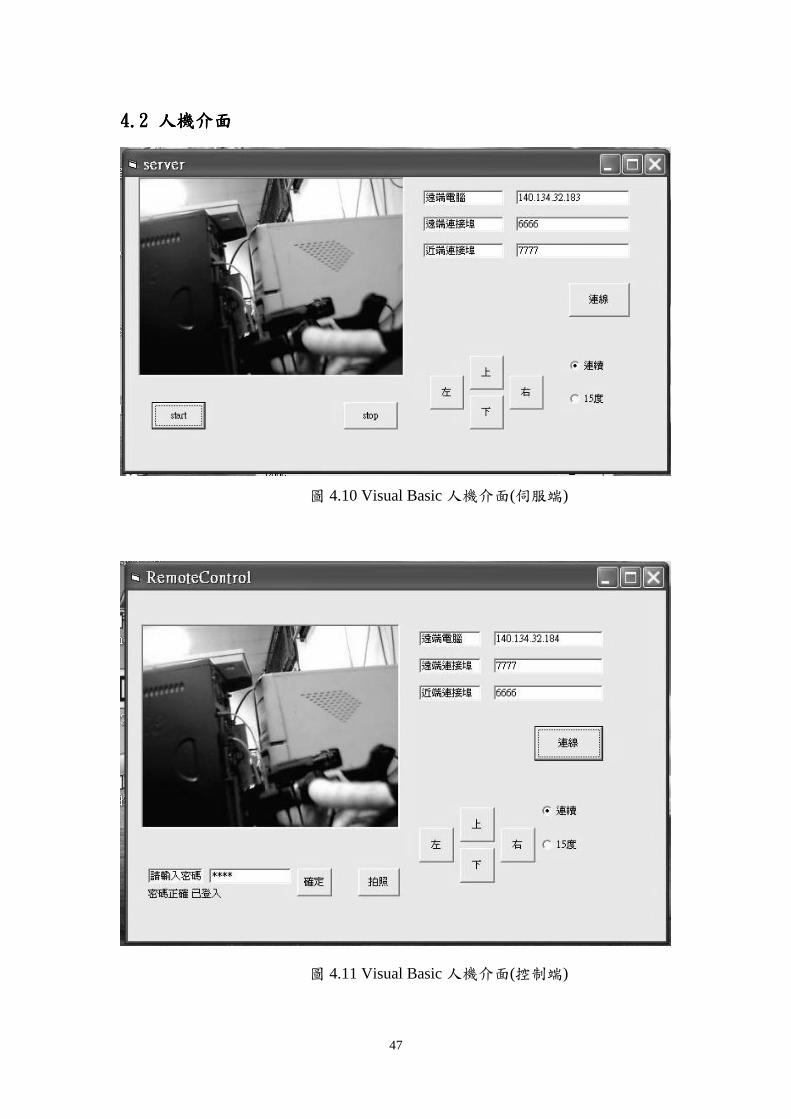
4.10 Visual Basic ( )
4.11 Visual Basic ( )

48
3.10 3.11 Visual Basic
” ” ”15 ” IP
” ”
”15 ”
15 IP IP
0 65535
” ” ”15
” IP
TCP/IP
IP IPv4 0 255
0.0.0.0 255.255.255.255 256*256*256*256 IP
IP IPv4
IP IP (debug)

49
A 10.0.0.0 – 10.255.255.255
256*256*256 IP
B 172.16.0.0 – 172.31.255.255
16*256*256 IP
C 192.168.0.0 – 192.168.255.255
256*256 IP
IP IP (
100 ) IP(1 IP + 100
IP) ( 100 IP 192.168.0.0
192.168.0.100 100 192.168.0.0
192.168.0.100 IP 1 IP + 100 IP )
IP
4.12 IP
4.2 IP

50
IP IP 3.12 IP
IP 192.168.0.113 LAN :
(1)
(2)
/
(3)
(4)
3.13 LAN WAN IP IP
4.13 IP
51
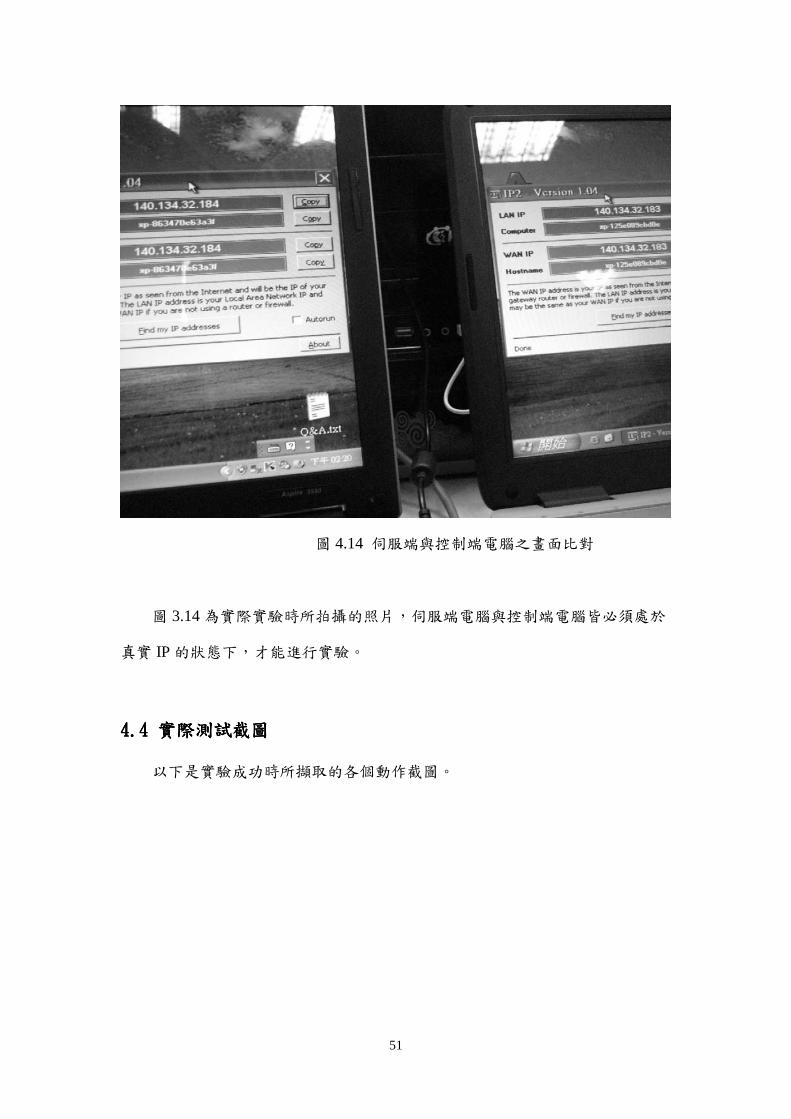
3.14
IP
4.14

52
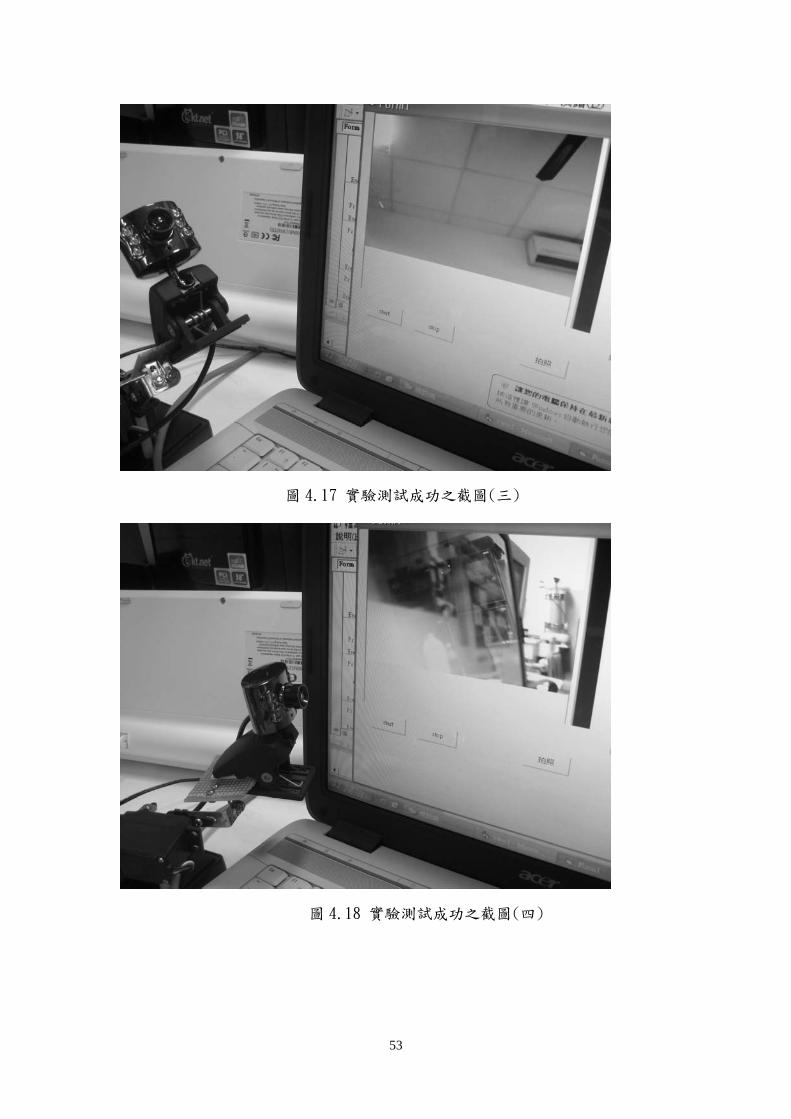
53

54

55
8051 Visual Basic
8051
Visual Basic 8051
8051
DIjpg.dll
.bmp .jpg
IP IP IP
IP IP
IP
8051
8051

56

57
8051 2007.3
8051 2006.2
VB RS232
2001.06
8051 Keil uVision3 2009.9
Visual Basic ( ) 2008.7
Visual Basic 2003.12
Visual Basic 2002.3
58
8051
ORG 00H
AJMP START
ORG 0023H ;RS232
JNB RI,NON
CLR RI
RECEV:
MOV A,SBUF ; SBUF ->A
CJNE A,#'U',R2 ; U R2
MOV 40H,#1 ;40H 1
JMP OKBACK
R2:
CJNE A,#'D',R3 ; D R3
MOV 40H,#2 ;40H 2
JMP OKBACK
R3:
CJNE A,#'L',R4 ; L R4
MOV 40H,#3 ;40H 3
JMP OKBACK
R4:
CJNE A,#'R',R5 ; R R5
MOV 40H,#4 ;40H 4
JMP OKBACK
R5:
CJNE A,#'S',R6 ; S R6

59
MOV 40H,#0 ;40H 0
JMP OKBACK
R6:
CJNE A,#'u',R7 ; u R7
MOV 40H,#5 ;40H 5
JMP OKBACK
R7:
CJNE A,#'d',R8 ; d R8
MOV 40H,#6 ;40H 6
JMP OKBACK
R8:
CJNE A,#'l',R9 ; l R9
MOV 40H,#7 ;40H 7
JMP OKBACK
R9:
CJNE A,#'r',R10 ; r R10
MOV 40H,#8 ;40H 8
JMP OKBACK
R10:
JMP OKBACK
NON:
CLR TI
OKBACK:
RETI
START:
MOV P1,#00000000B

60
MOV TMOD,#00100000B ; RS232 9600
MOV TH1,#253
MOV TL1,#253
SETB TR1
MOV SCON,#01110000B
CLR RI
CLR TI
SETB ES
SETB EA
MOV 40H,#0
CALL CENTER ;X
CALL CENTER2 ;Y
;
LOOP:
MOV A,40H
CJNE A,#1,L2 ;40H=1 L2
CALL UP ; ( )
JMP LOOP
L2:
MOV A,40H
CJNE A,#2,L3 ;40H=2 L3
CALL DOWN ; ( )
JMP LOOP
L3:
MOV A,40H
CJNE A,#3,L4 ;40H=3 L4

61
CALL LEFT ; ( )
JMP LOOP
L4:
MOV A,40H
CJNE A,#4,L5 ;40H=4 L5
CALL RIGHT ; ( )
JMP LOOP
L5:
MOV A,40H
CJNE A,#5,L6 ;40H=5 L6
MOV 40H,#0 ;40H 0
CALL UP2 ; 15 ( )
JMP LOOP
L6:
MOV A,40H
CJNE A,#6,L7 ;40H=6 L7
MOV 40H,#0 ;40H 0
CALL DOWN2 ; 15 ( )
JMP LOOP
L7:
MOV A,40H
CJNE A,#7,L8 ;40H=7 L8
MOV 40H,#0 ;40H 0
CALL LEFT2 ; 15 ( )
JMP LOOP
L8:

62
MOV A,40H
CJNE A,#8,TU ;40H=8 TU
MOV 40H,#0 ;40H 0
CALL RIGHT2 ; 15 ( )
JMP LOOP
TU:
JB P2.3,TD
TUA:
CALL UP ; ( )
JNB P2.3,TUA
TD:
JB P2.0,TL
TDA:
CALL DOWN ; ( )
JNB P2.0,TDA
TL:
JB P2.1,TR
TLA:
CALL LEFT ; ( )
JNB P2.1,TLA
TR:
JB P2.2,TJ
TRA:
CALL RIGHT ; ( )
JNB P2.2,TRA
TJ:

63
JMP LOOP
;
RIGHT:
MOV A,4BH
CJNE A,#70,IR_L2 ;4BH 70 IR_L2
JMP IR_L3 ; IR_L3 1
IR_L2:
DEC 4BH ; 1
IR_L3:
MOV 4DH,4BH
MOV 3EH,#2 ;PWM =2
CALL PLOOP ; X
RET
; 15
RIGHT2:
MOV A,4BH
CJNE A,#70,IL2 ;4BH 70 IL2
JMP IL3 ; IL3 15
IL2:
CLR C
MOV A,4BH ; 15
SUBB A,#15
MOV 4BH,A
IL3:
MOV 4DH,4BH
MOV 3EH,#20 ;PWM =20

64
CALL PLOOP ; X
RET
;
LEFT:
MOV A,4BH
CJNE A,#250,IR_R2 ;4BH 250 IR_R2
JMP IR_R3 ; IR_R3 1
IR_R2:
INC 4BH ; 1
IR_R3:
MOV 4DH,4BH
MOV 3EH,#2 ;PWM =2
CALL PLOOP ; X
RET
; 15
LEFT2:
MOV A,4BH
CJNE A,#250,IR2 ;4BH 250 IR2
JMP IR3 ; IR3 15
IR2:
CLR C
MOV A,4BH ; 15
ADD A,#15
MOV 4BH,A
IR3:
MOV 4DH,4BH

65
MOV 3EH,#20 ;PWM =20
CALL PLOOP ; X
RET
;
UP:
MOV A,4EH
CJNE A,#70,IR_D2 ;4BH 70 IR_D2
JMP IR_D3 ; IR_D3 1
IR_D2:
DEC 4EH ; 1
IR_D3:
MOV 4FH,4EH
MOV 3EH,#2 ;PWM =2
CALL PLOOP2 ; Y
RET
; 15
UP2:
MOV A,4EH
CJNE A,#70,ID2 ;4BH 70 ID2
JMP ID3 ; ID3 15
ID2:
CLR C
MOV A,4EH
SUBB A,#15 ; 15
MOV 4EH,A
ID3:

66
MOV 4FH,4EH
MOV 3EH,#20 ;PWM =20
CALL PLOOP2 ; Y
RET
;
DOWN:
MOV A,4EH
CJNE A,#250,IR_U2 ;4BH 250 IR_U2
JMP IR_U3 ; IR_U3 1
IR_U2:
INC 4EH ; 1
IR_U3:
MOV 4FH,4EH
MOV 3EH,#2 ;PWM =2
CALL PLOOP2 ; Y
RET
; 15
DOWN2:
MOV A,4EH
CJNE A,#250,IU2 ;4BH 250 IU2
JMP IU3 ; IU3 15
IU2:
CLR C
MOV A,4EH ; 15
ADD A,#15
MOV 4EH,A

67
IU3:
MOV 4FH,4EH
MOV 3EH,#20 ;PWM =20
CALL PLOOP2 ; Y
RET
;
CENTER:
MOV 4BH,#160 ; 0
MOV 4DH,#160 ; 0
MOV 3EH,#25 ;PWM =25
C1:
SETB P1.0 ; PWM
CALL PWMM ; 0.01mS
DJNZ 4BH,C1 ; 4BH 4BH 1 0 C1
MOV 4BH,4DH ;4BH
CLR P1.0 ; PWM
CALL UNITW ; 18mS
DJNZ 3EH,C1 ; 25
RET
;
CENTER2:
MOV 4EH,#160 ; 0
MOV 4FH,#160 ; 0
MOV 3EH,#25 ;PWM =25
C2:
SETB P1.1 ; PWM
68
CALL PWMM ; 0.01mS
DJNZ 4EH,C2 ; 4EH 4EH 1 0 C1
MOV 4EH,4FH ;4EH
CLR P1.1 ; PWM
CALL UNITW ; 18mS
DJNZ 3EH,C2 ; 25
RET
;X
PLOOP:
R25:
SETB P1.0 ;
CALL PWMM ; 0.01mS
DJNZ 4BH,R25 ; 4BH 4BH 1 0 R25
MOV 4BH,4DH ;4BH
CLR P1.0 ;
CALL UNITW ; 18mS
DJNZ 3EH,R25 ; ? ?=3EH
RET
;Y
PLOOP2:
R26:
SETB P1.1 ;
CALL PWMM ; 0.01mS
DJNZ 4EH,R26 ; 4EH 4EH 1 0 R26
MOV 4EH,4FH ;4EH
CLR P1.1 ;
69
CALL UNITW ; 18mS
DJNZ 3EH,R26 ; ? ?=3EH
RET
;
PWMM:
PWMM2:
NOP
NOP
RET
;
DEL:
MOV R6,#5
F1:
MOV R7,#52
F2:
DJNZ R7,F2
DJNZ R6,F1
RET
;
UNITW:
MOV R4,#32
UN1:
CALL DEL
DJNZ R4,UN1
RET
;

70
DETDY1S:
MOV R5,#10
DL0:
MOV R6,#150
DL1:
MOV R7,#200
DL2:
DJNZ R7,DL2
DJNZ R6,DL1
DJNZ R5,DL0
RET
END
![Groove Dance Competition and Convention - v Z µ o …...u ] ] } v Z µ o v Z P µ o ] } v ~ ó ï î ñ ó õ X ì ó ï ó Á Á Á X' } } À } u ] ] } v X } u > h W ^ u í ï U](https://static.documents.pub/doc/80x56/5f4330f29ba7db3c6914d49b/groove-dance-competition-and-convention-v-z-o-u-v-z-o-v-z-p-.jpg)




![ñ ï ï ð v ^ U E Á W } Z ] Z Ç U &> ï ð ò ñ î ~ ó î ó ô ð ô r ó ó ô õ · 2020. 2. 18. · *rrg 6dpdulwdq +hdowk &olqlf 5(9 3djh ri 'kk ^ d z/d e >/e/ } ( w ^ k](https://static.documents.pub/doc/80x56/60337f83fc549d45332fc995/-v-u-e-w-z-z-u-.jpg)








![Henry Jensen [Read-Only] · D o v } u u o ] P v v ð U ð ñ ñ ô ï ~ í X õ '/ î ô ~ ï ï X ó ò ~ ó X î E^ ~ ] v î U ï õ î í í ï ~ ð X ó > µ v P ï ô ~ ï ï](https://static.documents.pub/doc/80x56/5f7ff02c29bc241e81430489/henry-jensen-read-only-d-o-v-u-u-o-p-v-v-u-x-.jpg)


