31
Senior Design Project Proposal Group 5 Ben Bishop Jibu Abraham Steve Mezzo Tracy Shigemura

Senior Design Project Proposal
Group 5Ben BishopJibu AbrahamSteve MezzoTracy Shigemura
Project Overview
Design an intelligent, autonomous robot that will be capable of collecting and containing hazardous material.
What hazardous material will it collect?Conduct a business study to determine what type, or types, of hazardous materials would create the largest market for the Hazbot
Background – Robot Intelligence
Limiting factors of conventional robots:
Inability to perceive or adapt to their surroundingsReliance on human inputSimply put, robots are dumb
Background – Robot Intelligence (cont’d)
“The capacity to acquire and apply knowledge, especially toward a purposeful goal”“Not controlled by others or by outside forces; independent”Therefore, an intelligent autonomous robot must:
Have the ability to acquire data (knowledge)Make decisions based on that dataDo so without human input
Background – Examples of Autonomous Robots
DARPA Grand ChallengeDevelop an Autonomous Land Vehicle to complete a 142 mile course through Mojave DesertResults: “winner” completed just 7.4 miles
Mars RoverSemi-autonomous
Background – Examples of Autonomous Robots
Unmanned Predator DroneSurveillance/attack aircraft currently used in hostile areas (Afghanistan, Iraq)
How autonomy would help:In the late 90’s, Predator spotted Osama bin Laden, yet could not attack because it took human controllers too long to identify him

Hazmat Background Data
Incidents reported in 2003: 15,21117 major injuries, 102 minor injuries14 fatalities$52,270,052 in damages
Top incidents by class:Flammable-combustible liquid (6,545)Corrosive material (5,756)Poisonous material (795)
Purpose & Application
Raise Quality of LifeReduce CostsImprove worker healthIncrease qualityIncrease productivity
Current Robot Technology for Hazardous Waste Collection
World Conference on Disaster ManagementDOE National Council: Robotics & Intelligent Machines Cooperative Council (RIMCC)

DisciplinesProject Planning: Engineering Management
Physical Design: Mechanical, Electrical Engineering
Decision Making: Comp. Science, Comp. Engineering
Perception: Mechanical, Computer Engineering
Command : Mechanical, Electrical Engineering
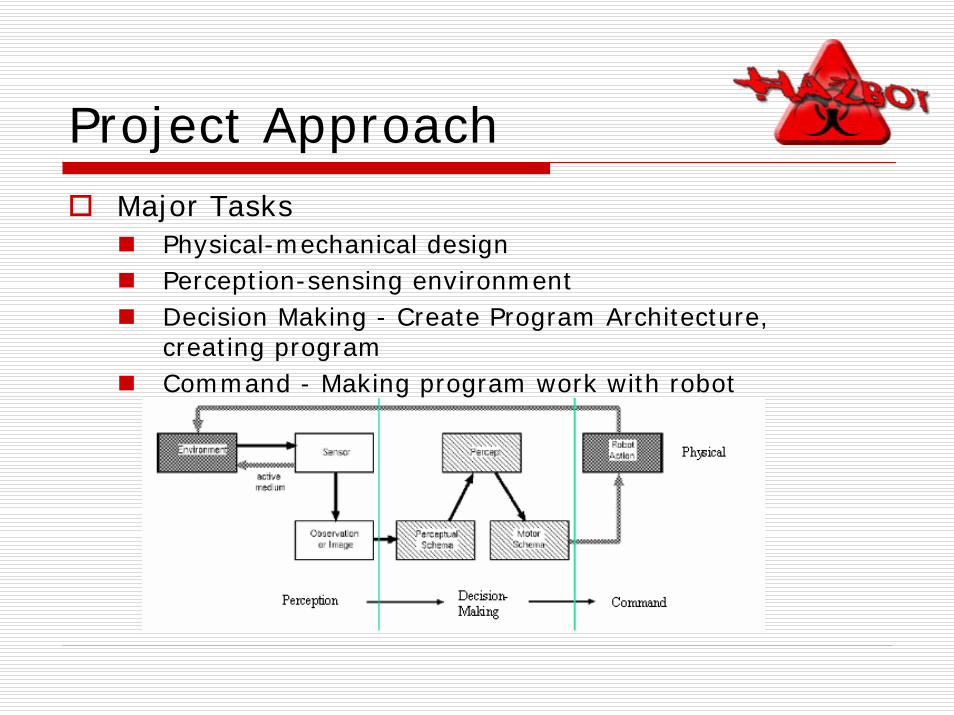
Project ApproachMajor Tasks
Physical-mechanical designPerception-sensing environmentDecision Making - Create Program Architecture, creating programCommand - Making program work with robot
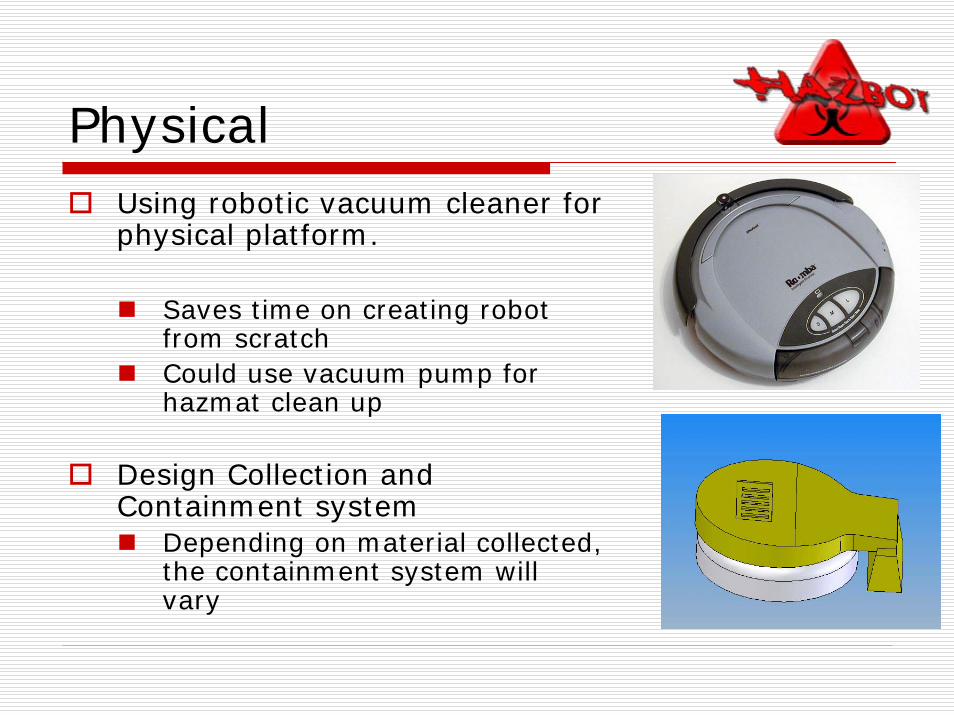
PhysicalUsing robotic vacuum cleaner for physical platform.
Saves time on creating robot from scratchCould use vacuum pump for hazmat clean up
Design Collection and Containment system
Depending on material collected, the containment system will vary
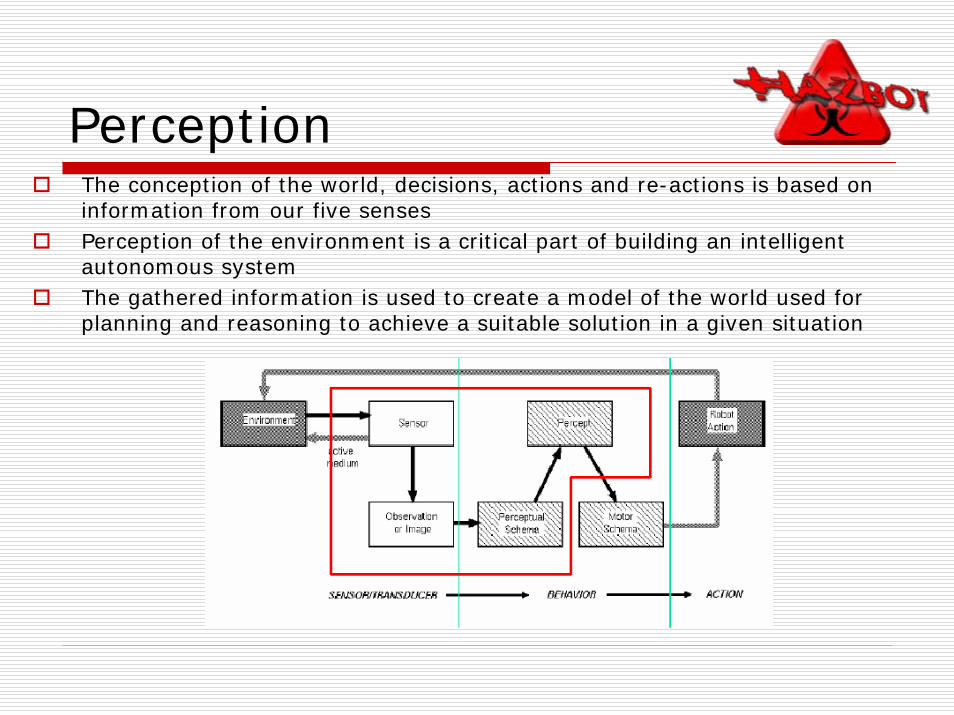
PerceptionThe conception of the world, decisions, actions and re-actions is based on information from our five senses Perception of the environment is a critical part of building an intelligent autonomous system The gathered information is used to create a model of the world used for planning and reasoning to achieve a suitable solution in a given situation
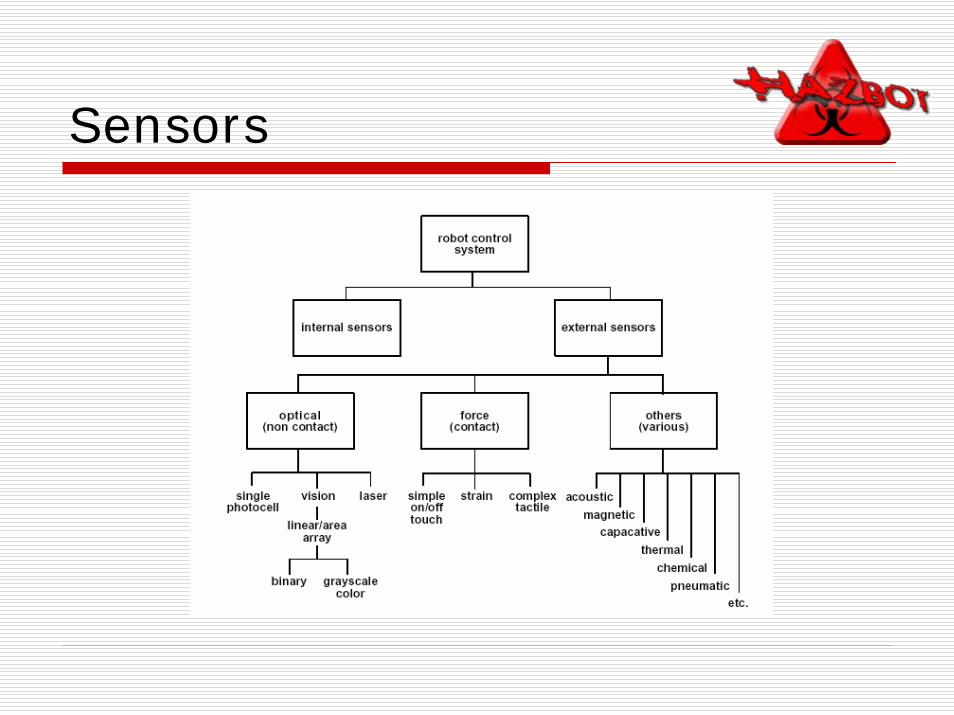
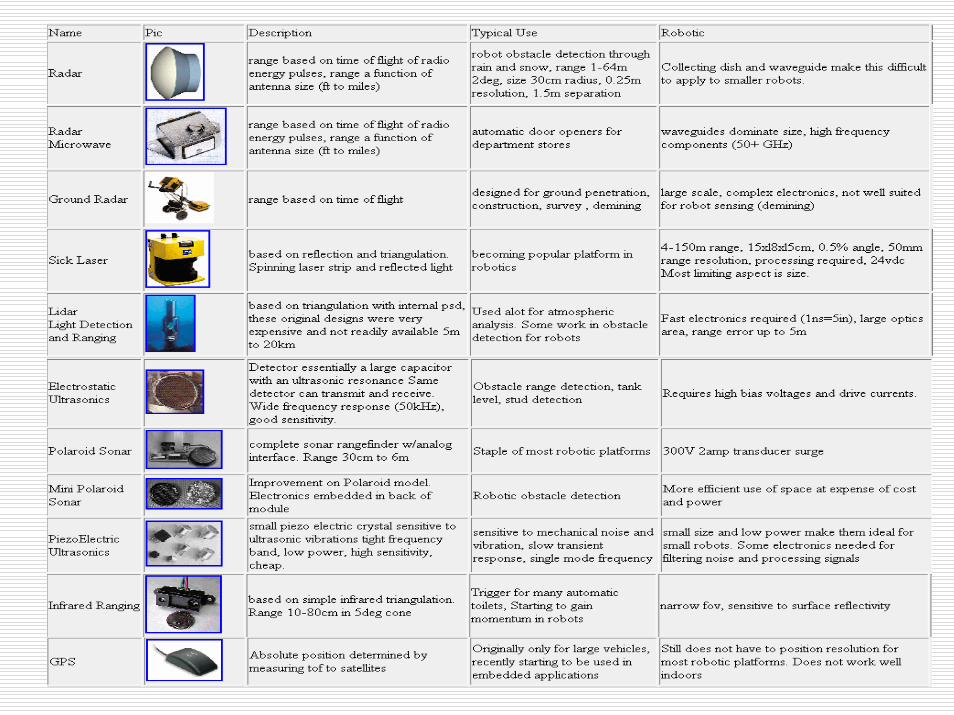
Sensors

Sensors (cont’d)Passive sensor:
Rely on the environment to provide the information
Ex. Camera
Active sensor:
Put energy into the environment which is then sensed
Ex. SONAR

Sensor AttributesField of view and range
Accuracy, repeatability and resolution
Responsiveness in the target domain
Power consumption
Hardware reliability
Size
Sensors (cont’d)Ultrasonics
Advantages:InexpensiveFastLarge operating rangeDisadvantages: High powerForeshortening
Infrared (IR): An active sensor, emits near-IR energy and measures how much comes back.
Advantages:Inexpensive Fast Disadvantages: Easily be confused by bright lighting or dark surfaces.
Sensors (cont’d)
Laser range finders: Very narrow and very long. The beam can scan to cover a wide area and produce an image with depth information
Advantages:Highly accurateDisadvantages:scanning part makes lasar radar very expensivecheaper if have planar laser range finder, giving a very narrow, horizontal view
Computer visionAdvantages:May be used in multiple environmentsMay be used in in multiple tasks
Disadvantages:Time consumingProgramming intensiveexpensive
“Where am I?”
To be intelligent the system must know where it is
With this the system can determine where it will go
“Where am I?” (cont’d)
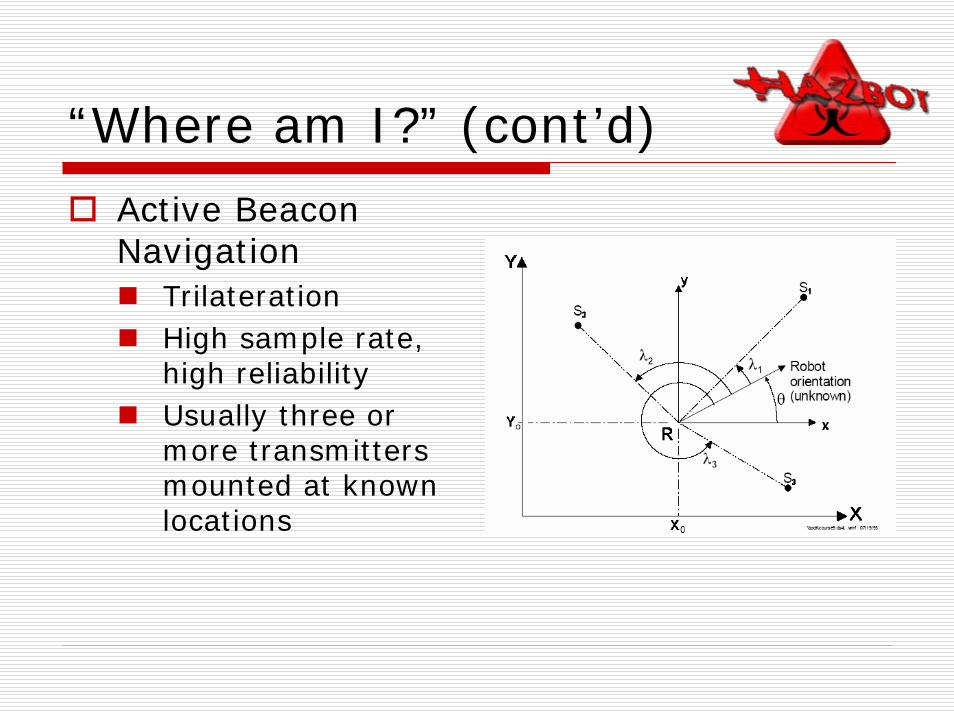
Active Beacon Navigation
TrilaterationHigh sample rate, high reliabilityUsually three or more transmitters mounted at known locations
“Where am I?” (cont’d)
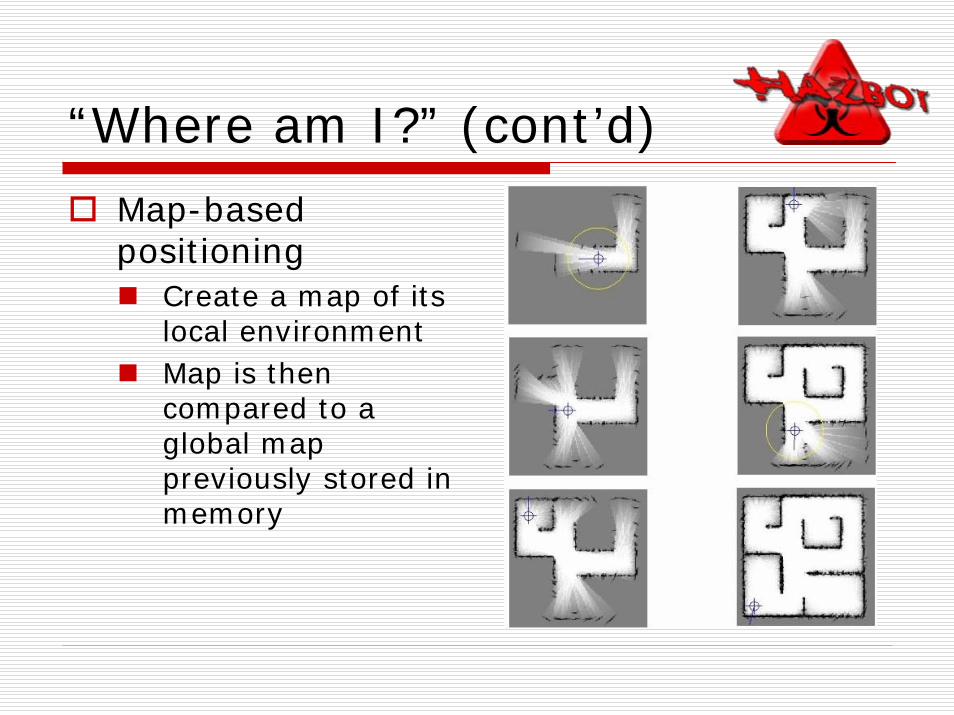
Map-based positioning
Create a map of its local environment Map is then compared to a global map previously stored in memory
Decision MakingPick Program Architecture
Reactive Architecture-same as the RoombaBehavior based stimulus/response“Intelligence” of robot dependent on number of behaviors and complexity of the responseHazbot intelligence will be based on the sensors picked, and how Hazbot will respond to the perception

Major Problems Safe Containment of Hazmat
Will not drive through the spillWill not re-introduce material into environment
System LogicKeep it simple, but still intelligent
Roomba HackingMake sure autonomous program can be displayedDon’t fry the board
Roomba perceptionTranslate sensation into usable dataConverting data into Hazbot action
Hazmat Detection Concept
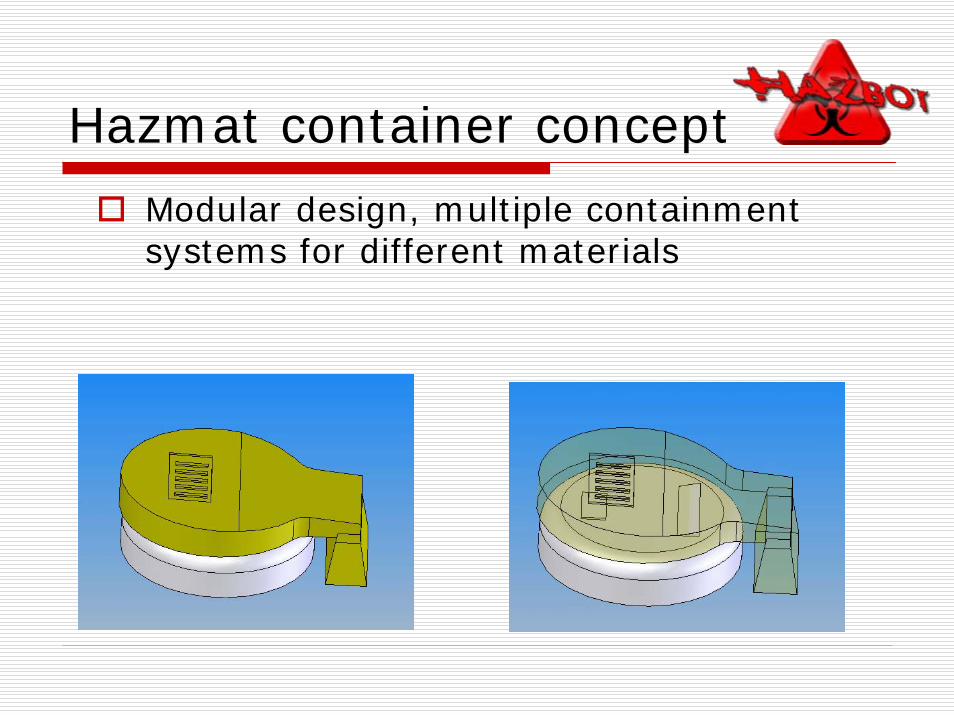
Hazmat container concept
Modular design, multiple containment systems for different materials

Command How the program interfaces with the mechanical system Hijack RoombaHacked Roomba with integration of additional sensors will be base
for command platform

Project Deliverables
Detailed robot design will include:CAD drawings of containment systemFEM analysis of containment systemHacked Roomba to serve as mechanical platformIntegrated sensor systemIntegrated computer hardware
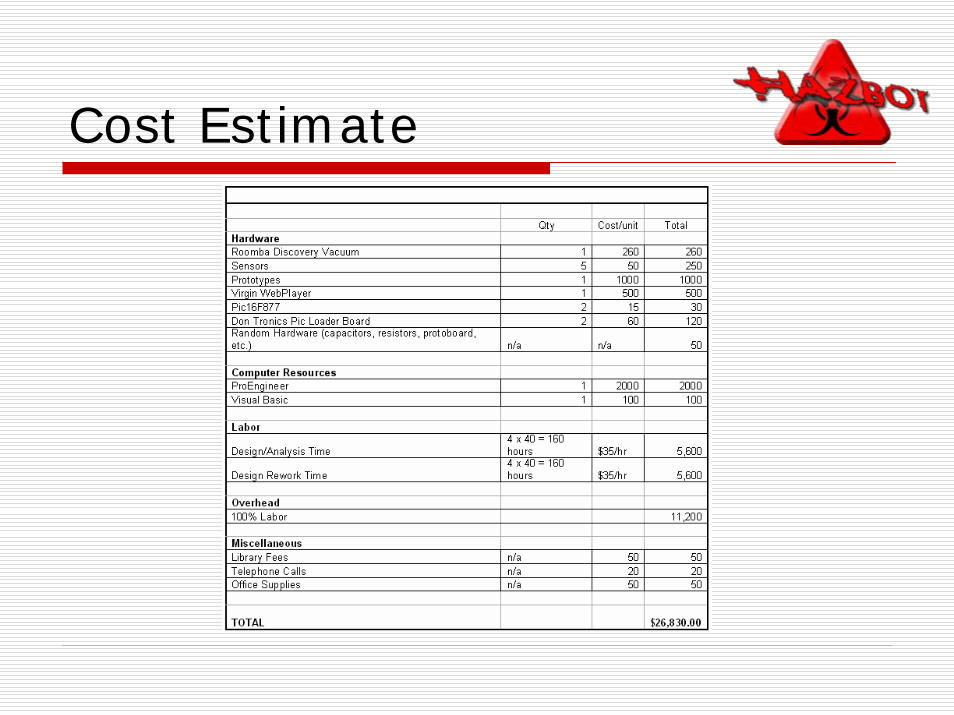
Cost Estimate
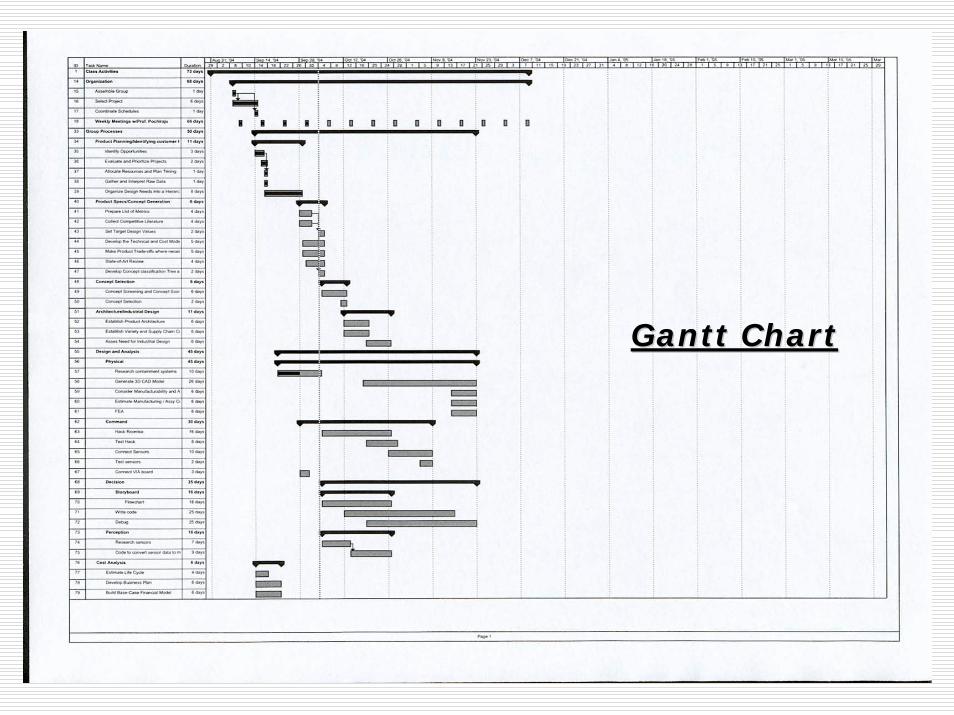
Gantt ChartGantt Chart
Conclusion
We plan to build an intelligent, autonomous robot to clean up and contain hazardous material spillsPrimary focus of project will be the intelligence systemKeys to intelligence system:
Ability to perceive surroundingsAbility to make intelligent decisions based on these perceptions

Questions
Questions
Questions
Questions

















