29
The Cricket Indoor Location System Nissanka Bodhi Priyantha and Michel Goraczko MIT Computer Science and Artificial Intelligence Lab http://nms.lcs.mit.edu/cricket

The Cricket Indoor Location System
Nissanka Bodhi Priyantha
and
Michel Goraczko
MIT Computer Science and Artificial Intelligence Lab
http://nms.lcs.mit.edu/cricket

Cricket
• Location for mobile applications– Resource discovery
– Human/Robot navigation/tracking
– Games
• Location-aware sensing– Routing
– Data dissemination
– Annotating data with location information

Resource Discovery
“Print map on a color printer,”and system sends data to thenearest available color printer

Virtual/Physical Games

Location-Aware Sensing• Ubiquitously deployed
networked sensors can enable new forms of monitoring and control– Tracking assets (RF-ID
tags)– Monitoring conditions– Traffic, facilities, physical
plant, leaks, smoke, fire…• Sensor streams usually need
to be annotated with location and time for them to be useful
• Goal: Cricket-enabled sensors
Temperature, light, sound sensors, buzzer
Temperature, light, sound sensors, buzzer

Functionality: Space, Position, Orientation
Room 7(N)
Room 7(S)
Co
rrid
or (x y z)
● Space: Rooms, parts of rooms● Position: Coordinates● Orientation: Direction vector
Cricket provides all three

Design Goals for Cricket
• Must operate well indoors• Must scale to large numbers of devices• Should not violate user location privacy• Must be easy to deploy and administer• Should have low energy consumption

Cricket Architecture
Beacon
Listener
Passive listeners + active beacons scales well, helps preserve user privacyDecentralized network of autonomous beacons
info = “a1”
info = “a2”
Estimate distancesto infer location

Obtain linear distance estimatesPick nearest to infer “space”Solve for device’s (x, y, z)Determine w.r.t. each beacon and deduce orientation vector
SPACE = NE43-510COORD = (146 272 0)

• A beacon transmits an RF and an ultrasonic signal simultaneously– RF carries location data, ultrasound is a narrow
pulse
• The listener measures the time gap between the receipt of RF and ultrasonic signals– Velocity of ultrasound << velocity of RF
Determining Distance
RF data(space name)
Beacon
Listener
Ultrasound(pulse)

Multiple Beacons Cause Complications
• Beacon transmissions are uncoordinated
• Ultrasonic pulses reflect off walls
These make the correlation problem hard and can lead to incorrect distance estimates
Solution: Distributed scheduling algorithms
Beacon A Beacon B
tRF B RF A US B US A
Incorrect distance
Listener
Solution
• Distributed beacon scheduling– Carrier-sense + randomized transmission (reduces
chances of concurrent beaconing)– Idle time between beacon chirps to allow ultrasound
to “die down”– Another possibility is distributed TDMA
• Listener inference algorithm– Processing distance samples to estimate location– Key problem is outlier rejection

Example Estimation Algorithm:Windowed MinMode
Distance(feet)
Frequency
A B
5 10
5
109Majority
6.47.2Mean (feet)
86Mode (feet)
86Actual distance (feet)
BA

Kalman Filter: For Mobile Listeners
● Min-mode based estimation is “slow”– Needs multiple samples from a beacon
– Poor performance with mobile listeners● Solution: Use a Kalman filter based estimator
– Kalman filter uses a “predict and correct” approach to filter outliers

Beacon Autoconfiguration
● For listeners to compute their position,beacons need to transmit their locations
● Problem: How do beacons determine their locations?– Manual configuration (e.g., counting ceiling tiles) is
possible but tedious● Goal: Scalable autoconfiguration

Beacon Autoconfiguration: For a Small Number of Beacons
● Place the listener under each beacon and collect distances to each beacons
● Calculate inter-beacon distances● Calculate beacon coordinates
– Selecet three initial beacons and assign coordiantes– Trangulate the others using these three
dA dB
dABA
B
dA dB
dABA
B

Beacon Autoconfiguration:Anchor Free Localization (AFL)
● For large number of beacons● AFL is a two phase distributed algorithm for
node localization– Phase 1: Fold-free initialization'– Phase 2: Optimization
● AFL needs local inter-beacon distances– Cricket beacons cannot measure interbeacon
distances● Listener-assisted AFL
– Use a mobile listener to patch-together disconncted beacons

Cricket Hardware Platforms
• Two platforms– CF interface
– Rs232 interface
• Both platforms can be software configured as a Beacon or a Listener– Unused submodules can be powered down to save
energy
• Can be programmed using a standard Mica programming board (MIB-510CA)

Cricket Hardware

Cricket Block Diagram
u-controllerAtmega 128L
RF interfaceCC1000
Ultrasonic Tx
Ultrasonic Rx
Temperature Sensor
51-pin mote interface
• Ultrasonic transmitter
– 40kHz piezo transmitter
– Driven by a 12V square wave
• Ultrasonic receiver
– 40kHz piezo sensor
– Two amplifier stages followed by an envelope detector
– Second amp stage has software adjustable gain
Serial IDSerial IDHost InterfaceCF or RS 232

Cricket Block Diagram
• RF interface– CC1000 based – similar to Mica2– Additionally, there is a carrier threshold detector
• Mote connector – Can interface with a Mica sensor board or a Mica– Communication with Mica through RS232 or I2C
interface
• Temperature sensor– On-board temperature sensor– Used to offset ultrasonic velocity change with
temperature

Ultrasonic Ranging Characteristics
• Radiation pattern– Easy to block the signal at the transmitter, but
not at the receiver

Cricket Precision
● Distance estimation performance● Area coverage
– Error vs distance● Beacon density

Distance Estimation Performance

Coverage Area
● Ultrasound range is 10.5 meters● Radio range must be larger then ultrasound
0 50 100 150 200 250 300 350 400 4500
50
100
150
200
250
300
350
400
450
500
True Distance vs mesured distance
True distance
Mes
ured
dis
tanc
e

TinyOS architecture and implementation
● Application (CricketBeacon and CricketListener)
● Modification to the radio stack● Ultrasound activation● Compensation● Scheduling
Receive(30ms + 1-3ms)
Idle state(800-1200ms)
Send
If failed*
* The receive while is reset each time a beacon is heard
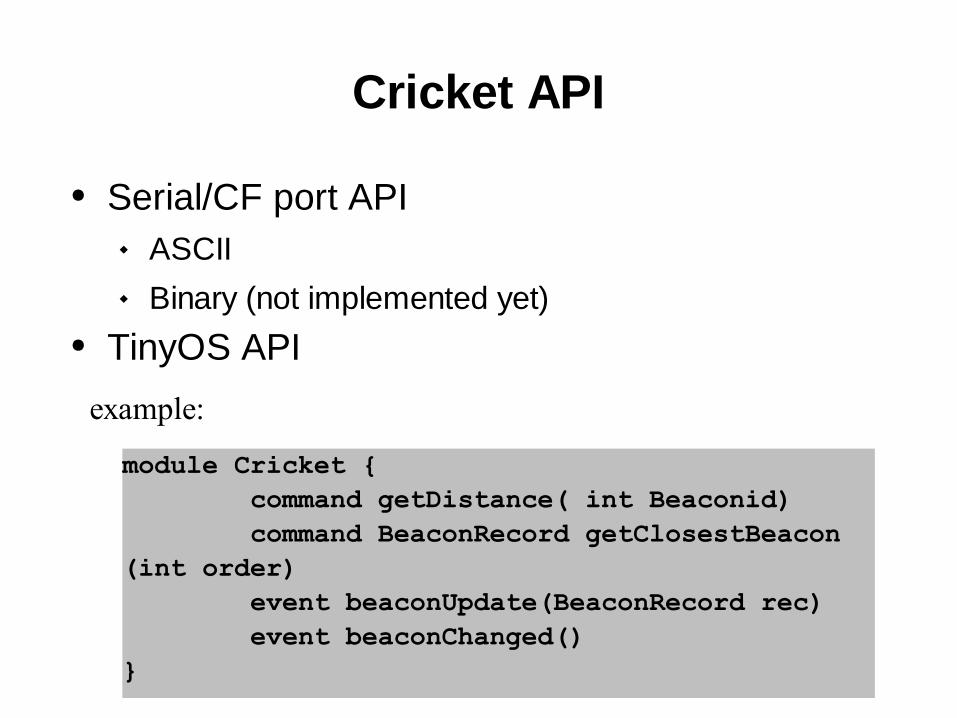
Cricket API
● Serial/CF port API ASCII Binary (not implemented yet)
● TinyOS API
module Cricket { command getDistance( int Beaconid) command BeaconRecord getClosestBeacon(int order) event beaconUpdate(BeaconRecord rec) event beaconChanged()}
example:

Cricket Serial APISerial
Beacon Listener Command Direction Parameters TypeParameter Description Read Write Read Write ASCII BIN Get Output Put Input ASCII BIN
ASCII/BIN Mode • • • • MD 0x01 <mode> <mode> String[1] Char
Node ID Unique node id • • ID 0x02 <id> N/A String[16] Long
Space Name User specified space id • • • • SN 0x03 <name> <name> String[12] String[12]
Distance • • DB 0x04 <distance units> <distance units> string[5],string[2] ushort,char
Duration • DR 0x05 <duration units> <duration units> string[5],string[2] ushort,char
Coordinates • • • • PC 0x06 <tag x y z units> <tag x y z units> String[1],3*string[6],string[2] Char,3*short,char
Sleep • • SL 0x07 <low high units> <low high units> 2*string[5],string[2] 2*ushort,char
Ultrasound lifetime • • • • UL 0x08 <lifetime units> <lifetime units> string[5],string[2] ushort,char
Temperature Temperature on the node • • TP 0x09 <temp units> <temp units> string[5],string[2] ushort,char
Battery Level • • BL 0x0A <level> <level> String[5] Short
Uptime Time since powered up • • UP 0x0B <units> <time units> string[5],string[2] ushort,char
Version Software version • • VR 0x0C None <version> String[5] String[5]
Filter Event filter • • FL 0x0D <filter expression> <filter expression> String[128] String[128]
User defined User defined • • DG 0xFF <user string> <variable> String[128] Variable
Communication protocol to use
Distance between the lis-tener and the beacon
Ultrasound time of flight (uncorrected)
Coordinates of the node (x y z)
Sleep range between beacon chirp
The ultrasound life be-fore the wave attenuate
Reading of the voltage level from the battery

Cricket Demo
● Ranging● 2D localisation demo● ASCII serial API demo






![Indoor Sports Halls with Cricket Provision [TS3]...ECB Facility Briefs and Guidance Notes for Indoor Sports Halls with Cricket Provision Page 04 *Design note: ECB’s recommended optimum](https://static.documents.pub/doc/80x56/5f106e6f7e708231d4491393/indoor-sports-halls-with-cricket-provision-ts3-ecb-facility-briefs-and-guidance.jpg)



![Indoor Sports Halls with Cricket Provision [TS3]pulse-static-files.s3.amazonaws.com/ecb/document/2016/08/29/6cdd2… · ECB Facility Briefs and Guidance Notes for Indoor Sports Halls](https://static.documents.pub/doc/80x56/5adc55357f8b9aeb668b6018/indoor-sports-halls-with-cricket-provision-ts3pulse-static-filess3-ecb-facility.jpg)






