1604 Bulletin of the Seismological Society of America, Vol. 95, No. 5, pp. 1604–1622, October 2005, doi: 10.1785/0120050058 The Dynamics of Strike-Slip Step-Overs with Linking Dip-Slip Faults by David D. Oglesby Abstract Fault step-overs with linking dip-slip faults are common features on long strike-slip fault systems worldwide. It has been noted by various researchers that under some circumstances, earthquakes can jump across fault step-overs to cas- cade into large events, while under other circumstances rupture is arrested at step- overs. There is also evidence that fault step-overs may be preferential locations for earthquake nucleation. The present work uses the 3D finite element method to model the dynamics of strike-slip fault systems with step-overs and linking dip-slip faults. I find that the presence of a linking normal or thrust fault greatly increases the ability of earthquake rupture to propagate across the step-over, leading to a larger event. Additionally, dilational step-overs with linking normal faults are more prone to through-going rupture than compressional step-overs with linking thrust faults. This difference is due to the sign of the normal stress increment on the dip-slip fault caused by slip on the strike-slip segments: Slip on the strike-slip segments causes a negative (unclamping) normal stress increment on the linking normal fault in a di- lational step-over, whereas the opposite effect occurs on the linking thrust fault in a compressional step-over. Even in cases for which both dilational and compressional step-overs can experience through-going rupture, dilational step-overs typically ex- perience higher slip, particularly on the linking normal fault. In the compressional case, rupture nucleation on the linking thrust fault may increase the likelihood of through-going rupture compared to nucleation on one of the strike-slip segments. Near the intersections between the fault segments, the stress interaction between the fault segments also causes a significant rotation of rake away from that which would be inferred from the regional stress field. The results help to emphasize the impor- tance of two-way interactions between nearby fault segments during the earthquake rupture process. The results also may have implications for the probability of large earthquakes along geometrically complex strike-slip fault systems, and may help explain why step-overs sometimes act as barriers and other times as nucleation lo- cations for large earthquakes. Introduction Geologists have long known that faults are not simple planar features, but typically have complex three-dimensional geometry. In particular, faults often consist of multiple offset segments. These offsets can range in scale from meters to tens of kilometers (e.g., Wesnousky, 1988; Courboulex et al., 1999; Geist and Zoback, 1999; Zoback et al., 1999; Yule and Sieh 2003; Zampier et al., 2003; Brankman and Aydin, 2004; Lin et al., 2004). In such fault systems, the fault ge- ometry may play a key role in many aspects of the earth- quake process. Segment offsets may serve both as preferred hypocenter locations and as barriers against rupture propa- gation. For example, The M 7.9 1906 San Francisco, Cali- fornia earthquake is believed to have nucleated in a step- over region and propagated bilaterally (Zoback et al., 1999), while the M 5.0 1996 Epagny-Annecy, France earthquake most likely terminated at a restraining step-over (Courboulex et al., 1999). An important practical issue that arises in the study of offset fault segments is whether rupture may prop- agate across step-overs, leading to a larger earthquake. Wes- nousky (1988) cited many earthquakes on major strike-slip faults that both were bounded by and ruptured through com- pressional and dilational step-overs. In analyzing the seismic hazard of the San Francisco Bay region, Parsons et al. (2003) studied the potential interaction of the Hayward and Rodgers Creek faults at the extensional step-over that separates the two faults underneath San Pablo Bay. One of the important issues that they addressed is whether normal faults exist in the step-over region, under the assumption that such linking normal faults could increase the probability of rupture prop- agating across the step-over. In this work I model the dy-
Transcript
1604
Bulletin of the Seismological Society of America, Vol. 95, No. 5, pp. 1604–1622, October 2005, doi: 10.1785/0120050058
The Dynamics of Strike-Slip Step-Overs with Linking Dip-Slip Faults
by David D. Oglesby
Abstract Fault step-overs with linking dip-slip faults are common features onlong strike-slip fault systems worldwide. It has been noted by various researchersthat under some circumstances, earthquakes can jump across fault step-overs to cas-cade into large events, while under other circumstances rupture is arrested at step-overs. There is also evidence that fault step-overs may be preferential locations forearthquake nucleation. The present work uses the 3D finite element method to modelthe dynamics of strike-slip fault systems with step-overs and linking dip-slip faults.I find that the presence of a linking normal or thrust fault greatly increases the abilityof earthquake rupture to propagate across the step-over, leading to a larger event.Additionally, dilational step-overs with linking normal faults are more prone tothrough-going rupture than compressional step-overs with linking thrust faults. Thisdifference is due to the sign of the normal stress increment on the dip-slip faultcaused by slip on the strike-slip segments: Slip on the strike-slip segments causes anegative (unclamping) normal stress increment on the linking normal fault in a di-lational step-over, whereas the opposite effect occurs on the linking thrust fault in acompressional step-over. Even in cases for which both dilational and compressionalstep-overs can experience through-going rupture, dilational step-overs typically ex-perience higher slip, particularly on the linking normal fault. In the compressionalcase, rupture nucleation on the linking thrust fault may increase the likelihood ofthrough-going rupture compared to nucleation on one of the strike-slip segments.Near the intersections between the fault segments, the stress interaction between thefault segments also causes a significant rotation of rake away from that which wouldbe inferred from the regional stress field. The results help to emphasize the impor-tance of two-way interactions between nearby fault segments during the earthquakerupture process. The results also may have implications for the probability of largeearthquakes along geometrically complex strike-slip fault systems, and may helpexplain why step-overs sometimes act as barriers and other times as nucleation lo-cations for large earthquakes.
Introduction
Geologists have long known that faults are not simpleplanar features, but typically have complex three-dimensionalgeometry. In particular, faults often consist of multiple offsetsegments. These offsets can range in scale from meters totens of kilometers (e.g., Wesnousky, 1988; Courboulex etal., 1999; Geist and Zoback, 1999; Zoback et al., 1999; Yuleand Sieh 2003; Zampier et al., 2003; Brankman and Aydin,2004; Lin et al., 2004). In such fault systems, the fault ge-ometry may play a key role in many aspects of the earth-quake process. Segment offsets may serve both as preferredhypocenter locations and as barriers against rupture propa-gation. For example, The M 7.9 1906 San Francisco, Cali-fornia earthquake is believed to have nucleated in a step-over region and propagated bilaterally (Zoback et al., 1999),while the M 5.0 1996 Epagny-Annecy, France earthquake
most likely terminated at a restraining step-over (Courboulexet al., 1999). An important practical issue that arises in thestudy of offset fault segments is whether rupture may prop-agate across step-overs, leading to a larger earthquake. Wes-nousky (1988) cited many earthquakes on major strike-slipfaults that both were bounded by and ruptured through com-pressional and dilational step-overs. In analyzing the seismichazard of the San Francisco Bay region, Parsons et al. (2003)studied the potential interaction of the Hayward and RodgersCreek faults at the extensional step-over that separates thetwo faults underneath San Pablo Bay. One of the importantissues that they addressed is whether normal faults exist inthe step-over region, under the assumption that such linkingnormal faults could increase the probability of rupture prop-agating across the step-over. In this work I model the dy-
The Dynamics of Strike-Slip Step-Overs with Linking Dip-Slip Faults 1605
Figure 1. (a) Schematic diagram of fault geometryconsisting of two vertical strike-slip segments (la-beled 1 and 3) linked by a 45�-dipping dip-slip faultin the step-over region (labeled 2). Nucleation is typ-ically on strike-slip segment 1, but in certain modelsnucleation is on dip-slip segment 2 or strike-slip seg-ment 3 (stars). (b) Cross-sectional view of the faultgeometry in Figure 1a. The reader is looking directlytoward the fault system along a line perpendicular tothe strike of the strike-slip segments and parallel tothe strike of the dip-slip segment. Thus, strike-slipsegment 3 is closer to the reader than strike-slip seg-ment 1.
namics of fault systems consisting of strike-slip fault step-overs linked by dip-slip faults in hopes of delineating someof the general features of such systems, with an eye towardboth theoretical and practical (seismic hazard) applications.
Many researchers (e.g., Harris et al., 1991; Harris andDay, 1993; Yamashita and Umeda, 1994; Kase and Kuge,1998; Harris and Day, 1999; Kase and Kuge, 2001) havemodeled the dynamics of strike-slip faults with step-oversin the absence of linking faults. In general, these studiesshow that the ability of rupture to jump across a step-overdepends strongly on the width of the step-over and the de-gree of overlap between the segments, with closer segmentsand positive (i.e, with no along-strike gap) overlaps allowingrupture to jump more easily. Another important factor is thedirection of the step-over with respect to the sense of slipon the strike-slip faults: right-lateral faults with right step-overs and left-lateral faults with left step-overs produce ex-tension/dilation in the step-over region, whereas left-lateralfaults with right step-overs and right-lateral faults with leftstep-overs produce compression in the step-over region. Thestudies cited above, as well as the quasi-static analysis ofSegall and Pollard (1980), indicate that it is much easier forrupture to jump across dilational step-overs than compres-sional step-overs. This effect is due to the dependence offriction on the normal stress: A compressive normal stressincrement such as that produced in a compressive step-overincreases the frictional strength (failure stress) on nearbyfault segments, inhibiting rupture propagation, while a di-lational normal stress increment such as that produced in anextensional step-over brings nearby faults closer to failure.In many cases, the normal stress increment can be even moreimportant than the shear stress increment in aiding or inhib-iting nucleation on the secondary fault segment (Harris etal., 1991; Harris and Day, 1993). In contrast, Sibson (1985,1986) has argued that the above dilational normal stress in-crement in dilational step-overs should lead to a suddenopening of fluid-filled tension cracks, creating suction forcesthat inhibit rupture propagation across the step-over. Ananalogous effect is also seen in some of the models of Harrisand Day (1993), where models with a nonzero Skemptoncoefficient decrease the ability of rupture to propagate acrossa dilational step-over compared with the fluid-free case.
There is reason to believe that the presence of linkingfaults can have a significant effect on the ability of ruptureto propagate across segment step-overs. Magistrale and Day(1999) investigated the dynamics of a system of thrust faultslinked by strike-slip tear faults. In their models, they as-sumed that the linking faults were essentially passive fea-tures, with their prestress levels set to the sliding frictionalstrength. They found that in spite of the fact that the linkingfaults had a net energy release of zero, the presence of alinking fault allowed rupture to jump across larger step-oversbetween the thrust faults than was possible with no linkingfault. The physical mechanism for this effect is that a linkingfault allows a continuous rupture evolution across the entirefault system. In such a fault system, the rupture front, rather
than rapidly decaying seismic waves, can carry the “failure”signal across the step-over, increasing the distance overwhich rupture can propagate.
While the Magistrale and Day (1999) study helps toexplain some of the results seen in the current work (suchas the observation that linking faults aid in propagation ofrupture across the step-over), one must bear in mind that thecurrent faulting configuration is quite different from that oflinked thrust segments. In the present work, slip on thestrike-slip segments changes the normal stress on the linkingfault, unlike in the case of the linked thrust segments. Figure1 shows a schematic picture of two strike-slip segments thathave a right step-over occupied by a linking dip-slip fault.Simple kinematic analysis argues that if such a fault systemslips in the right-lateral (dilational) sense, clamping normalstress will be decreased on the linking fault. In such a case,we would predict that the linking normal fault would becomemore favorable for rupture as slip accumulates on the strike-slip segment(s). Conversely, left-lateral slip will tend to in-crease the clamping normal stress on the linking thrust fault,
1606 D. D. Oglesby
Table 1Geometrical, Material, Frictional, and Numerical Parameters
Static Frictional Coefficient 0.7Sliding Frictional Coefficient 0.5Slip Weakening Parameter 0.3 mNucleation Radius 6000 mApproximate Element Size 500 m � 500 m
leading to this fault becoming less favorable for rupture asslip accumulates on the strike-slip segment(s). As will beshown, this normal stress increment is responsible for manyof the effects seen in the current study.
Other works that investigate the dynamics of linkedfault step-overs are few. Aochi and Fukuyama (2002) mod-eled the dynamics of the 1992 Landers, California, earth-quake, in which rupture propagated across many dilationalstep-overs that were linked by strike-slip faults. However,their work focused on fitting the known slip data and usedthe mapped fault geometry; it did not directly deal with thespecific effect of the linking fault on rupture propagation.There does exist some modeling research on fault systemsthat share some aspects of the current fault geometry. Studiesthat investigate how rupture transfers from strike-slip faultsto dip-slip faults and vice versa include static and dynamicmodels of fault rupture in the Los Angeles, California, area(Anderson et al., 2003), dynamic models of the 2002 Denalifault, Alaska, earthquake (Aagaard et al., 2004; Dreger etal., 2004; Oglesby et al., 2004), and static models of inter-secting fault segments (Muller and Aydin, 2004). Theseworks in general show that the ability of rupture to jumpbetween dip-slip faults and strike-slip faults dependsstrongly (and in a complex manner) on the applied prestressfield, as well as the dynamic stress field radiated from thepropagating rupture. This general result is consistent withdynamic models of bent and branched fault systems as well(Bouchon and Streiff, 1997; Aochi et al., 2000a,b; Aochi etal., 2002; Harris et al., 2002; Kame et al., 2003; Oglesby etal., 2003; Duan and Oglesby, 2005). Depending on the rela-tive orientations of the fault segments, it can be very difficultto obtain through-going ruptures with complex fault geom-etry. This point is made even more strongly by H. Aochi etal. (unpublished manuscript, 2005), who performed moregeneral models of rupture propagating from a strike-slipfault to a thrust or normal fault. They found that only undercertain rather extreme triaxial prestress fields could rupturepropagate across both fault segments. Both Muller and Ay-din (2004) and H. Aochi et al. (unpublished manuscript,2005) also note that the intersection of noncoplanar faultsegments with different focal mechanisms can induce sig-nificant spatial rotation of rake on both segments.
The present work analyzes the ability of rupture to prop-agate across linked dilational and compressional step-overs,as well as the slip patterns resulting from earthquakes onsuch systems. Key variables include the stress pattern on thefault segments, the hypocenter location, the dip and strikeof the linking dip-slip fault, and the degree of overlap of thestrike-slip faults. The fault geometry and stress patterns as-sumed are quite simplified compared with those seen in nat-ural settings (as cited previously), and only begin to coverthe range of parameters available. However, they illustratemany potentially significant behaviors that may be presentin real fault systems. It is hoped that the results may help toqualitatively constrain the behavior of such fault systems forseismic hazard evaluation, as well as illustrate some impor-
tant general features of fault segment interactions duringseismic rupture.
Method and Model Setup
The basic fault geometry is shown in Figure 1. Twovertical strike-slip faults (labeled 1 and 3) are connected bya linking dip-slip fault (labeled 2). This work focuses pri-marily on linking dip-slip faults with dips of 45� so that onemay directly compare results for compressional and dila-tional step-overs. However, the models also include step-overs with more realistic dips of 60� for normal faults and30� for thrust faults in the compressional and dilational step-overs, respectively. For simplicity, the models focus pri-marily on linking faults whose strikes are 90� from thestrikes of the strike-slip segments, but the models also in-clude more realistic cases in which the linking faults havestrikes 45� from those of the strike-slip segments. The finalgeometrical variable is the degree of overlap between thestrike-slip faults. Figure 1 illustrates the case with zero over-lap, but the present work also investigates cases in whichthe strike-slip faults overlap by as much as 14 km along theirmutual strike. In all cases, the linking dip-slip fault termi-nates 500 m (1 element) away from the planes of the strike-slip faults. Thus, the strike-slip faults are not offset by slipon the linking dip-slip fault. This configuration is motivatedby computational necessities, but given that the details offault intersections at depth (especially to 500-m resolution)are not well constrained, it is not inconsistent with naturalfault systems. The details of the fault geometry, materialproperties, and numerical mesh are summarized in Table 1.Note that the step-over width of 10 km is constant amongall the models. This width ensures that the results are notcomplicated too much by direct interactions between thestrike-slip segments (i.e., not mediated by the linking faults).Potential effects of varying the step-over width are brieflyaddressed in the Discussion section.
Much of this work is focused on comparing dilationaland compressional step-overs with identical fault geometrybut with different initial tectonic stress fields. Figure 2 shows
The Dynamics of Strike-Slip Step-Overs with Linking Dip-Slip Faults 1607
Figure 2. Map view cartoon of dilational andcompressional step-overs showing the principlestresses that lead to slip on the fault system. Thedashed lines indicate the surface projection of the bur-ied down-dip extent of the linking faults. Note thatwhile the amplitudes of horizontal stresses can be thesame in the two cases, the amplitude of the verticalstress cannot.
the two cases in cartoon form, with the dilational step-overshown on top and the compressional step-over on the bot-tom. For simplicity, most of the current models assumedepth-independent stresses. The strike-slip faults are as-sumed to be inclined 35� from the maximum compressivestress. Thus, for the strike-slip segments, the difference inthe prestress field between the dilational and compressionalcases lies only in the sign of the initial applied shear stress.
Constructing comparable initial stress fields for the link-ing faults in these two cases is more complicated, however,due to the linking faults’ nonzero dip. Therefore, differentassumptions are used for two different classes of models:(1) To facilitate comparisons between dilational and com-pressional cases, I assume the same initial shear and normalstress magnitudes on the linking faults as on the strike-slipfaults. This assumption implies that only dynamically in-duced effects (i.e., stress perturbations due to slip) introducedifferences between the dilational and compressional cases.This assumption is somewhat difficult to justify physically,
but could correspond to a situation in which the linkingfaults are essentially passive features whose stress fields aredetermined more by slip on the strike-slip segments than bythe overall tectonic loading. (2) To determine how the com-pressional and dilational cases might differ in nature, I as-sume a regional stress field that is resolved onto all faultsegments, including the linking dip-slip faults. Unfortu-nately, this assumption requires very different verticalstresses in the dilational and compressional cases, and con-sequently different shear and normal stresses on the linkingfaults in the two cases.
To minimize the differences between the dilational andcompressional cases (and thus to facilitate evaluation of thedynamic differences between them), the vertical stress inmodel class (2) above is scaled such that the linking faulthas the same relative fault strength S � 1.0 as the strike-
slip segments, where (Andrews,r � ryield initialS �
r � rinitial sliding
1976b). Thus, the linking faults in the dilational and com-pressional cases have the same relative potential for failure.This assumption results in different stress drops between thedifferent cases, however. Another possibility for equalizingstress between the dilational and compressional cases is toscale the vertical stress so that the linking fault has the samestatic stress drop (i.e., in the absence of dynamic effects) asthe rest of the fault segments. This method then produceslinking faults with different values of S in the two cases, andit was used in a few models as a check of the robustness ofthe results using equivalent S. The initial stress values aresummarized in Table 2. It is important to note that thestresses in these models are defined to facilitate comparisonsbetween the different faulting cases; they are not designednecessarily to approximate the real regional stress field ofany particular location on the Earth. Another important pointis that during the rupture process both the shear and normalstresses vary significantly; thus, the true stress drops on eachsegment may be very different from what would be calcu-lated from the initial static stress field alone.
To model spontaneous rupture propagation and slip onthe fault systems, I use the 3D explicit finite-element method(Whirley and Engelmann, 1993; Oglesby, 1999). For sim-plicity, the material model is a homogenous half-space sothat one may isolate the dynamic effects of the fault geom-etry from material heterogeneity. The fault boundary con-dition is of the “traction at split nodes” type (Andrews,1976a; Day, 1982; Andrews, 1999), with a Coulomb frictionlaw
|s| � lr , (1)n
where s is the shear stress on the fault, rn is the normal stress(positive in compression), and l is the coefficient of friction.As the fault slips, l decreases from lstatic to lsliding via a slip-weakening law (Ida, 1972; Palmer and Rice, 1973; Andrews,1976a):
1608 D. D. Oglesby
Table 2Stress Parameters
Regional Stress Field (All Cases) r1 (larger horizontal stress) 5.57 � 107 Par3 (smaller horizontal stress) 1.74 � 107 Pa
Stress on Strike-Slip Faults (All Cases) Normal Stress 3 � 107 PaShear Stress 1.8 � 107 Pa
Stress on Linking Normal Fault, Case SM Normal Stress 3 � 107 Pa(DILAdp45sk90stSM) Shear Stress 1.8 � 107 Pa
Stress on Linking Thrust Fault, Case SM Normal Stress 3 � 107 Pa(COMPdp45sk90stSM) Shear Stress 1.8 � 107 Pa
Stress on Linking Normal Fault, Case TC,45� Dip, 90� Strike
sl � l � (l � l ) (s � d )static static sliding 0� �d0 (2)l � l (s � d )sliding 0
where s is the slip at a point, and d0 is the slip-weakeningparameter. The values of the frictional parameters are sum-marized in Table 1. This frictional boundary condition al-lows slip in any shear direction on all fault segments, sospatial and temporal rake rotation is accommodated. Sinceequation (1) explicitly includes the dependence of the fric-tional stress on (time-dependent) normal stress, variations innormal stress affect both the prerupture strength of the ma-terial and the sliding frictional level.
Ruptures are nucleated by artificially forcing failure ina circular region on one of the faults at a rupture velocity of3 km/sec, until spontaneous rupture propagation is achieved.Prior experiments indicate that the results are relatively in-sensitive to the details of the nucleation process. Most rup-tures are nucleated on the left strike-slip segment (segment1), at a depth of 10 km and a distance of 5 km along strikefrom the left edge of the segment. This location is depictedby the left star in Figure 1. In some cases, rupture is nucle-ated on the linking fault (segment 2), at a depth of 10 kmand halfway along strike, or on the right strike-slip segment
(segment 3), at a depth of 10 km and a distance 5 km alongstrike from the right edge of the segment. These locationsare marked by the central and right star, respectively, in Fig-ure 1. It should be noted that with a nucleation radius of6 km, the zone of imposed rupture propagation persists tothe edge of the 10-km-wide dip-slip fault segment for mod-els that nucleate on that segment. However, experimentswith models with dip-slip fault widths of 15 km display re-sults essentially identical to those shown here, indicating thatthe size of the nucleation zone is not an important factor inthe current results.
The order in which the results will be presented is thefollowing: The initial fault geometry to be modeled is thatof 45� dipping normal and thrust faults (with strikes 90� fromthe strikes of the strike-slip segments) in the dilational andcompressional step-overs, respectively. The first results arefor models in which the same shear and normal stress am-plitudes are used on all fault segments. Next, using the samegeometry, I explore the effect of using a regional stress fieldresolved onto the various fault segments. I then investigatethe effect of changing the dip of the linking fault, the overlapof the strike-slip segments, and the strike of linking fault. Iwill use the following naming convention for the models:WWWWdpXXskYYstZZ. WWWW represents the sense ofslip on the offset fault system and takes the values DILA for
The Dynamics of Strike-Slip Step-Overs with Linking Dip-Slip Faults 1609
a dilational system or COMP for a compressional system(corresponding to right-lateral and left-lateral slip on thefault system, respectively). XX denotes linking fault dip, andcan take the values 45�, 30�, or 60�. YY denotes linking faultstrike, and can take the values 45� or 90�. ZZ denotes theassumption on stress, which is either SM (same shear andnormal stresses on all segments) or TC (tectonic stress re-solved on all segments). Other attributes of the models, suchas the nucleation location and the degree of overlap of thestrike-slip fault segments, will be noted separately.
Results
Presence versus Absence of Linking Fault
In all cases, in the absence of a linking fault, rupturedoes not propagate across the dilational or compressionalstep-over, and thus slip is confined to the initially nucleatingstrike-slip segment. This result is consistent with 2D and 3Ddynamic models of parallel strike-slip fault segments with-out linking faults (Harris et al., 1991; Harris and Day, 1993;Kase and Kuge, 1998; Harris and Day, 1999; Kase andKuge, 2001). As will be noted later, rupture can propagateacross the step-over under certain circumstances in which alinking fault is present. Thus, a primary result of this studyis that the presence of a linking thrust or normal fault cansignificantly increase the probability of through-going rup-ture at a fault step-over, and can increase the maximumevent size.
Same Shear and Normal Stress on All Segments
The simplest case analyzed is that of DILAdp45-sk90stSM and COMPdp45sk90stSM. As noted above, thissimple case is chosen because there is no difference in thestatic stress amplitudes between the dilational and compres-sive cases. Thus, differences between these two cases canbe attributed to the effects of stress interactions between thefault segments during the rupture and slip process. Figure 3ashows that when rupture nucleates on segment 1 of modelDILAdp45sk90stSM, it propagates across the step-over re-gion and causes slip on all segments. Note that even thoughthe initial static stresses are the same amplitude on all seg-ments, the linking normal fault has significantly more slipthan the strike-slip faults. This effect is due to the change innormal stress caused by slip on the strike-slip segments, aspredicted earlier: Slip on the strike-slip segments tends toreduce the clamping normal stress on the linking fault. Thecomplex stress interaction between the strike-slip and dip-slip fault segments is illustrated in Figure 4. At 6.5 sec intothe simulation, the rupture front is propagating on segment1 toward the linking normal segment. It reaches the edge ofsegment 1 at 9.4 sec, at which point one can see that stresswaves radiated by slip on segment 1 have increased the shearstress and decreased the normal stress near the surface onthe linking normal segment, bringing the segment closer tofailure. By 11.9 sec, the rupture front is propagating over
the linking normal segment, and by 14.1 sec, the rupturefront has propagated to strike-slip segment 3. At 34.9 sec,the entire fault system has slipped, leaving greatly reducednormal stress over most of the linking normal fault. Thus,we see that stress waves radiated by the strike-slip segmentsweaken the linking normal fault, aiding the propagation ofrupture across the step-over, and amplifying slip. Figure 4also shows the competing effects of the strike-slip fault seg-ments and the normal fault’s own nonvertical geometry onits stress field. Between 9.4 sec and 11.9 sec, the decreasednormal stress near the surface on the linking fault (due toslip on segment 1) is replaced by a zone of increased normalstress. This small zone of increased normal stress near thesurface is consistent with analog and numerical models ofdip-slip faults (Brune, 1996; Nielsen, 1998; Oglesby et al.,1998; Shi et al., 1998; Bonafede and Neri, 2000; Oglesbyet al., 2000a,b), which predict that near the surface, slip ona normal fault will result in a compressional normal stressincrement on the fault owing to a stress interaction with theEarth’s traction-free surface. However, this effect is confinedonly to the top few kilometers; over the rest of the normalfault, the normal stress is significantly decreased by slip onthe strike-slip segments. It should be noted that the down-dip directed “stripes” of slightly higher and slightly lowerslip on the linking fault in Figure 3a and other figures arenumerical noise, which appears when this segment ceasesslipping, near the end of the simulations. As can be seenfrom the slip snapshots above, this noise does not affect theprocess of rupture propagation, so it has little effect on theresults of this study.
The effect of changing the sign of the shear prestresson this fault system is dramatic. As shown in Figure 3b, inthe compressional (left-lateral slipping) case COMPdp-45sk90stSM, slip is confined to the nucleating strike-slipsegment 1; it does not propagate to the linking thrust faultor the second strike-slip segment. The reason for rupturedying out at this point is seen in Figure 5, which showssnapshots of stress on the compressional step-over. At6.5 sec, the compressional case is essentially identical to thedilational case because the nonplanar nature of this fault sys-tem has not yet manifested itself. However, at 9.4 sec, thestress waves radiated by segment 1 have caused a significantincrease in the normal stress near the surface on the linkingthrust fault. As the rupture covers all of segment 1 (14.1 secto 34.9 sec), this zone of increased normal stress on the link-ing thrust fault grows, clamping it down and preventing itfrom slipping. Without slip on the linking thrust fault, rup-ture cannot propagate to the other strike-slip segment. Thus,a change in the sign of the shear stress is enough to com-pletely change the qualitative character of the rupture andslip process, resulting in a much larger earthquake in thedilational case.
Another effect of the fault geometry of this fault systemis a significant rotation of rake away from the direction thatone would infer from the prestress direction alone. Figure 6shows the increment in rake away from the prestress direc-
1610 D. D. Oglesby
Figure 3. (a) Final slip distribution on dilational fault system for case DILAdp-45sk90stSM. In this case, the rupture propagates over the entire fault system. (b) Final slipdistribution on compressional fault system for case COMPdp45sk90stSM. In this case, therupture is confined to the nucleating fault segment (strike-slip segment 1).
tion in the dilational case DILAdp45sk90stSM. In thismodel, the prestress direction corresponds to a rake of 180�on strike-slip segments 1 and 2, and 270� degrees on thelinking normal fault segment 3. We see a rake rotation of upto 23� and 29� in the dip-slip direction on strike-slip seg-ments 1 and 2, respectively, near where they intersect thelinking normal fault. In contrast, models of equivalent strike-slip faults in isolation (i.e., with no linking fault or secondarystrike-slip fault) show that the strike-slip segments exhibitpeak rake rotation of less than �10�.
To determine the effect of hypocenter location on thedynamics of this simple system, I experimented with hypo-centers located on strike-slip segment 3 and linking fault 2.For brevity I do not present the results for the case withnucleation on fault 3; they are quite similar (but not identi-cal) to those with nucleation on segment 1, with through-going rupture in the dilational case and rupture restricted tothe nucleating segment (3) in the compressional case. How-ever, the case of earthquake nucleation on the linking fault(2) produced significantly different results. Figure 7 showsthe slip on the fault system in both the dilational and com-pressional cases. The slip in the dilational case is qualita-tively similar to the model with nucleation on segment 1.The slip in the compressional case, however, is completelydifferent from the model with nucleation on segment 1: withnucleation on the linking thrust fault, rupture is able to prop-agate to both strike-slip segments, leading to slip on the en-tire fault system. In this case, rupture is able to propagateover the entire fault system because rupture proceeds ini-tially on the linking thrust fault without any stress incrementfrom the strike-slip segments. In the first seconds of theearthquake, there is no clamping effect on the thrust fault,so it is able to slip over its whole area. After rupture prop-agates to the strike-slip faults, however, there is a strong
increase in normal stress over most of the linking thrust fault,as shown in Figure 8. The thrust fault experiences a positiveincrement of normal and shear stress owing to slip on thestrike-slip segments, as well as a negative normal stress in-crement near the surface owing to its own nonvertical ori-entation with respect to the free surface. It is important tonote that even though both the dilational and compressionalfault systems slipped over their entire areas in the case ofnucleation on the linking dip-slip fault, the slip patterns inthese two cases are not equivalent: the dilational case hassignificantly more slip, particularly on the linking fault, thanthe compressional case (Table 3).
Tectonic Regional Stress Resolved on All Segments
While the preceding results provide insight into howdynamic changes in normal and shear stress can affect thepropagation of rupture and slip on a simple step-over system,the assigned prestress field in those results may not reflectreal stress fields seen in natural faults. It has become com-mon in studies of nonplanar fault systems to assign staticprestresses by assuming that they arise from a uniform tri-axial compressive stress field. It is this assumption that isused in models DILAdp45sk90stTC and COMPdp45-sk90stTC. As noted by H. Aochi et al. (unpublished manu-script, 2005), rupture propagation between faults with verydifferent orientation and slip direction often requires ratherextreme assumptions on the stress field. In the current tec-tonic stress models, the vertical stress must be quite large toproduce normal linking faults with the same S value as thestrike-slip faults in the dilational case, while the verticalstress must be correspondingly quite small in the compres-sional case (Table 2). The present work does not address thequestion of how such stresses may arise in nature; I merely
The Dynamics of Strike-Slip Step-Overs with Linking Dip-Slip Faults 1611
Figure 4. Snapshots of stress increments from the initial stress field for dilationalfault system case DILAdp45sk90stSM. Right-lateral slip on the strike-slip segmentsgreatly reduces the clamping normal stress on the linking normal fault, allowing rupturepropagation over the entire fault system. (a) t � 6.5 sec. (b) t � 9.4 sec. (c) t � 11.9sec. (d) t � 14.1 sec. (e) t � 34.9 sec. (continued)
1612 D. D. Oglesby
Figure 4. Continued.
note that the relative effects seen in the current results mayadd to other systematic differences between dilational andcompressional step-overs that exist in the real world; onlyby assuming relatively similar stress and fault geometry be-tween the two cases may one isolate the effects of slip di-rection on the system.
Because DILAdp45sk90stTC and COMPdp45sk90stTChave very different vertical stresses, they also have quitedifferent static stress drops on their linking faults, and alsodiffer from cases DILAdp45sk90stSM and COMPdp45-sk90stSM described above (see Table 2). Figure 9 shows theslip distribution for the dilational case DILAdp45sk90stTC;note the very high slip on the linking normal fault due to itsmuch higher static stress drop. As in the cases with the sameshear and normal stresses over all segments, rupture in thedilational case DILAdp45sk90stTC propagates across thestep-over to cause slip on all fault segments. Similarly, rup-ture in the compressive case COMPdp45sk90stSM (notshown) does not propagate beyond the nucleating segment1, leaving a slip pattern identical to that of the caseCOMPdp45sk90stSM (Fig. 3b). The cause of rupture dyingout on COMPdp45sk90stTC is the same as noted before:slip on segment 1 causes a strongly positive normal stressincrement on the linking fault (segment 2), preventing itfrom failing. The final stress in the dilational case DILA-
dp45sk90stTC (Fig. 10) shows that in this case, as in DILA-dp45sk90stSM, slip on the strike-slip fault decreases normalstress on the linking normal fault, facilitating rupture andslip. Figure 10 also displays an effect that is not present inDILAdp45sk90stSM or COMPdp45sk90stSM: the effectthat slip on the linking normal fault has on the stress on thestrike-slip segments. In the tectonic regional stress field, theapplied tectonic (static) shear stress on the linking fault inboth the dilational and compressional cases is not purely dip-slip directed; the normal fault in DILAdp45sk90stTC isloaded in the left-lateral sense, and the thrust fault inCOMPdp45sk90stTC is loaded in the right-lateral sense. Asseen in Figure 10, left-lateral slip on normal fault segment2 causes a decrease in the normal stress on both strike-slipfaults. This effect further amplifies slip on the strike-slipsegments. This effect, coupled with an increase in shearstress caused by the slip on the normal fault, leads to a largecontrast in the amount of slip on strike-slip segment 1 be-tween the dilational and compressional cases.
The effect of the strike-slip component of prestress onthe linking fault is also seen in models where nucleation ison the linking fault. Figure 11a displays the slip on modelDILAdp45sk90stTC with nucleation on the normal fault; itsslip pattern is very similar to the case in which nucleation ison strike-slip segment 1 (Fig. 9). However, as shown in Fig-ure 11b, the compressional case COMPdp45sk90stTC (withnucleation on the thrust fault) does not result in rupture prop-agation to the strike-slip segments at all. The reason for thiscontrasting behavior with COMPdp45sk90stSM (with nu-cleation on segment 2) is shown in Figure 12. Right-lateralslip on the linking thrust fault causes a large increase innormal stress on the neighboring strike-slip segments. Thesestress buildups serve as barriers to further rupture. Thus, wesee that the tectonic stress field introduces a two-way inter-action between the linking faults and the strike-slip faults:there is a positive feedback in the normal stress for the di-lational case, leading to amplified slip on all segments, anda negative feedback in the compressional case, which tendsto hinder fault rupture and slip on all segments in the system.
Effect of Strike-Slip Fault Overlap
To investigate how the degree of overlap betweenstrike-slip fault segments affects the ability of rupture topropagate across the step-over, we use the same stress fieldas in cases DILAdp45sk90stTC and COMPdp45sk90stTC,and extend the strike-slip segments along strike beyond theintersection with the linking dip-slip fault. For brevity, I donot include figures showing these results, as they qualita-tively look very similar to the results for DILAdp-45sk90stTC and COMPdp45sk90stTC with nucleation onsegment 1. For all fault overlaps, in the compressional casesthe rupture dies out on the nucleating segment, whether it issegment 1, 2, or 3. I find that in the dilational case withnucleation on segment 1, rupture can propagate across thestep-over for overlaps of up to 6 km (i.e., each strike-slip
The Dynamics of Strike-Slip Step-Overs with Linking Dip-Slip Faults 1613
Figure 5. Snapshots of stress increments from the initial stress field for dilational faultsystem case COMPdp45sk90stSM. Left-lateral slip on the strike-slip segments greatly in-creases the clamping normal stress on the linking normal fault, prohibiting rupture propagationto segments 2 and 3. (a) t � 6.5 sec. (b) t � 9.4 sec. (c) t � 14.1 sec. (d) t � 34.9 sec.
1614 D. D. Oglesby
Figure 6. Change in rake with respect to the initialrake of the static prestress field on the dilational faultsystem DILAdp45sk90stSM (180� for the strike-slipfault segments, 270� for the linking normal fault).Note that slip on the linking normal fault induces astrong dip-slip component of motion on the nearbyedges of the strike-slip segments.
segment extends 3 km beyond the linking normal fault).However, for overlaps greater than this value, rupture doesnot propagate to the linking fault or to the neighboringstrike-slip segment. This result indicates that for the smalloverlaps, the stress waves radiated as the rupture terminateson segment 1 (stopping phases) are strong enough to nucle-
ate rupture on the linking normal segment, which has alreadyhad its normal stress decreased by slip on the nucleatingsegment. However, for longer overlaps, these stoppingphases decay too much as they propagate, and do not causerenucleation on the linking fault. In the dilational case, nu-cleation on the linking fault (segment 2) results in rupturepropagating over the entire fault system for all the strike-slip fault overlaps.
More Realistic Linking Fault Dip
Normal and thrust faults typically have different rangesof dip angles: normal faults usually have dips steeper than45�, while thrust faults usually have dips shallower than 45�.In our step-over models, we would expect more steeply dip-ping normal faults and more shallowly dipping thrust faultsboth to increase each fault’s tendency to rupture. In the for-mer case, a steeper dip should result in a greater decrease innormal stress owing to slip on the strike-slip faults, and inthe latter case, a shallower dip should minimize the corre-sponding increase in normal stress. The slip patterns forcases DILAdp60sk90stTC and COMPdp30sk90stTC areshown in Figure 13. The slip for case DILAdp60sk90stTCis qualitatively similar to that of case DILAdp45sk90stTC.The reason there is less slip on the linking normal fault inDILAdp60sk90stTC is that linking fault is required to havean S value of 1.0; with the new fault geometry, such a stressfield results in a smaller static stress drop on this segment.The slip pattern for case COMPdp30sk90stTC is signifi-cantly different from that of COMPdp45sk90stTC. In par-ticular, slip in COMPdp30sk90stTC propagates from the nu-
Figure 7. (a) Final slip distribution on dilational fault system for case DILA-dp45sk90stSM with nucleation on the linking normal fault (segment 2). As in the caseof nucleation on strike-slip segment 1, the rupture propagates over the entire faultsystem. (b) Final slip distribution on compressional fault system for caseCOMPdp45sk90stSM with nucleation on the linking thrust fault (segment 2). Unlikethe case with nucleation on strike-slip segment 1, rupture propagates over the entirefault system.
The Dynamics of Strike-Slip Step-Overs with Linking Dip-Slip Faults 1615
cleating strike-slip segment (segment 1) to the linking thrustfault (segment 2). However, the strike-slip motion of thelinking thrust fault causes enough of a positive increment innormal stress on strike-slip segment 3 to lock that segmentup and extinguish rupture. Thus, changing the dip angle tomore realistic values increases the ability of rupture to prop-agate in the compressive case, but does not eliminate thedifference between the dilational and compressional cases.
45�-Striking Linking Faults
Unlike the previous simplified models, linking faults innature typically have strikes significantly less than 90� fromtheir nearby strike-slip faults (e.g., Courboulex et al., 1999;Zampier et al., 2003; Brankman and Aydin, 2004; Waka-bayashi et al., 2004). To investigate this potentially morerealistic fault geometry, I modeled dilational and compres-sional step-overs where the linking faults have dips of 45�
and strikes of 45� (rather than 90�), greater than their cor-responding strike-slip faults. The slip patterns associatedwith these models (DILAdp45sk45stTC and COMPdp45-45sk45stTC) are shown in Figure 14. In both cases, ruptureis able to propagate across the step-over. The differencesbetween the dilational and compressive cases are the small-est of any of the faulting scenarios. One reason for this sim-ilarity is that for 45�-striking linking faults, the static stressfield favors left-lateral slip on the linking fault in both thedilational and compressional cases. Thus, slip on the strike-slip faults would tend to reduce the strike-slip component ofshear stress on the linking normal fault in a dilational step-over, while such slip on the strike-slip segments increasesthe shear stress on the linking thrust fault in a compressionalstep-over. However, even in this more favorable geometryand stress scenario, the dilational step-over still has some-what higher slip than the compressional step-over becauseof the normal stress increment discussed earlier (Table 3).The static stress drop (as predicted by the prestress field inthe absence of dynamic effects) on the linking fault is largerfor the dilational case than for the compressional case, andone might argue that this difference in static stress dropmight be responsible for some of the difference in the ab-solute amount of slip on the two fault systems. To explorethis issue, I produced models of this fault geometry forwhich the predicted static stress drop (prior to dynamic ef-fects) on the linking faults was equal to 30 bars for bothsystems (matching the stress drop on the strike-slip seg-ments). This assumption leads to an S value of 1.8 on thedilational system and 1.3 on the compressional system.Thus, in isolation, the thrust fault and normal fault shouldhave equal slips, but the thrust fault should be more likelyto fail. However, the results for this model indicate that rup-ture propagates across the entire dilational system, but isunable to propagate to the linking thrust fault in the com-pressional case. Taken together with the earlier results forthis fault geometry, these results indicate that regardless ofthe strike and dip angle, the effects of the normal stress in-crement caused by the strike-slip faults are still significant.
Discussion
The results of current models are summarized in Table3, with the exception of the models with nonzero strike-slipfault overlap, which are described in the Results section.There are two important general results of the present work.First, it is much easier for rupture to propagate across step-overs between strike-slip faults if there is a linking dip-slipfault in the step-over region. This result is consistent withthe work of Magistrale and Day (1999) on linked thrustfaults, even though the static and dynamic stress fields in thepresent work are quite distinct from this earlier work. Thesecond general result is that it is much easier for rupture topropagate across a dilational step-over with a linking normalfault than across a compressional step-over with a linkingthrust fault. This result is consistent with the work of a num-
Figure 8. Final stress increment from initial stressfield for compressional fault system case COMP-dp45sk90stSM with nucleation on the linking thrustfault (segment 2). Slip on the linking thrust fault ini-tially takes place without any stress increment fromthe strike-slip faults, allowing rupture to propagateover the entire fault system. After rupture propagatesto the strike-slip segments, a strong normal stress in-crease is induced on the thrust fault, inhibiting slip.
1616 D. D. Oglesby
ber of researchers on fault step-overs with no linking faults(Harries et al., 1991; Harris and Day, 1993; Kase and Kuge,1998; Kase and Kuge, 2001). These results appear to berobust with respect to linking fault strike and dip, as well asto assumptions about the stress field on the fault segments.However, it is important to note that the models in this articleare for a narrow range of fault geometry and stress pattern.The models are not designed to represent exactly what faultstep-overs look like in nature, where they commonly havemultiple linking faults, variations in strike and dip, and manyother complicated geometrical features (e.g., Courboulex etal., 1999; Geist and Zoback, 1999; Zoback et al., 1999; Yuleand Sieh 2003; Zampier et al., 2003; Brankman and Aydin,2004; Lin et al., 2004). Rather, the current study is designed
to isolate some physical processes that may be important inthe dynamics of fault step-overs.
One issue that is not explored in detail in the currentwork is the effect of the step-over width. As noted by manyresearchers (e.g., Harris et al., 1991; Harris and Day, 1993;Yamashita and Umeda, 1994; Kase and Kuge, 1998; Harrisand Day, 1999; Kase and Kuge, 2001), large step-overwidths make it much more difficult for rupture to propagateacross a step-over with no linking fault. The same is true forstep-overs that are connected by a linking fault with zerostatic stress drop (Magistrale and Day, 1999). In the currentwork, however, experiments with wider (15-km) step-oversshow results essentially identical to the 10-km stepovers. Iexpect that in general the results will be relatively insensitive
Table 3Summary of Results
ModelNature ofStep-Over
Linking FaultDip, Strike Stress Assumption
NucleationSegment
RupturePropagation
Avg. Slip(m)
Total SeismicMoment (N m)and Magnitude
DILAdp45sk90stSM dilational 45�, 90� same shear/normalstress on all segments
strike-slipsegment 1
through-going Seg. 1: 2.2Seg. 2: 3.0Seg. 3: 2.3
1.3 � 1020
7.4
COMPdp45sk90stSM compressional 45�, 90� same shear/normalstress on all segments
strike-slipsegment 1
confined tosegment 1
Seg. 1: 1.8Seg. 2: 0Seg. 3: 0
4.3 � 1019
7.1
DILAdp45sk90stSM dilational 45�, 90� same shear/normalstress on all segments
normalsegment 2
through-going Seg. 1: 2.4Seg. 2: 3.0Seg. 3: 2.2
1.3 � 1020
7.4
COMPdp45sk90stSM compressional 45�, 90� same shear/normalstress on all segments
thrustsegment 2
through-going Seg. 1: 2.0Seg. 2: 1.4Seg. 3: 2.0
1.1 � 1020
7.4
DILAdp45sk90stTC dilational 45�, 90� tectonic stress resolvedon all segments
strike-slipsegment 1
through-going Seg. 1: 2.8Seg. 2: 6.4Seg. 3: 3.1
1.9 � 1020
7.5
COMPdp45sk90stTC compressional 45�, 90� tectonic stress resolvedon all segments
strike-slipsegment 1
confined tosegment 1
Seg. 1: 1.8Seg. 2: 0Seg. 3: 0
4.3 � 1019
7.1
DILAdp45sk90stTC dilational 45�, 90� tectonic stress resolvedon all segments
normalsegment 2
through-going Seg. 1: 3.1Seg. 2: 6.5Seg. 3: 3.0
2.0 � 1020
7.5
COMPdp45sk90stTC compressional 45�, 90� tectonic stress resolvedon all segments
thrustsegment 2
confined tosegment 2
Seg. 1: 0Seg. 2: 0.9Seg. 3: 0
6.9 � 1018
6.6
DILAdp60sk90stTC dilational 60�, 90� tectonic stress resolvedon all segments
strike-slipsegment 1
through-going Seg. 1: 2.3Seg. 2: 3.8Seg. 3: 2.4
1.4 � 1020
7.4
COMPdp30sk90stTC compressional 30�, 90� tectonic stress resolvedon all segments
strike-slipsegment 1
confined tosegments1 and 2
Seg. 1: 1.5Seg. 2: 0.8Seg. 3: 0
4.6 � 1019
7.1
DILAdp45sk45stTC dilational 45�, 45� tectonic stress resolvedon all segments
strike-slipsegment 1
through-going Seg. 1: 1.9Seg. 2: 2.2Seg. 3: 2.1
1.3 � 1020
7.4
COMPdp45sk45stTC compressional 45�, 45� tectonic stress resolvedon all segments
strike-slipsegment 1
through-going Seg. 1: 1.7Seg. 2: 1.6Seg. 3: 1.8
1.1 � 1020
7.4
The Dynamics of Strike-Slip Step-Overs with Linking Dip-Slip Faults 1617
to the step-over width, because the linking fault has a non-zero static stress drop and can support propagating ruptureover large distances. A wider linking fault will experienceless of a normal and shear stress increment from slip on thenearby strike-slip fault; however, the effect on the stress fieldat the edges of the linking fault should be relatively unaf-fected by its width. Since it is the stress field at the edges ofthe linking fault that determine the ability of rupture to prop-agate across the step-over, I expect that the ability of ruptureto propagate across wider or narrower step-overs will besimilar to those presented here, as long as the step-over isnot narrow enough to allow a direct jump between the strike-slip segments without a linking fault. However, for rupturesthat propagate across the step-overs, the differences in link-ing-fault slip between the dilational and compressional cases(e.g., Fig. 7) should decrease with increasing linking-faultwidth. The reason is that as the width of the step-over grows,a larger proportion of the linking fault will be relatively un-affected by the normal stress increment from the strike-slipsegments, and will experience slip that is determined pre-dominantly by the static stress field.
Perhaps importantly, the present results do not includethe effects of pore-fluid migration. Sibson (1985, 1986) hasargued that many strike-slip earthquakes are observed to ter-minate at dilational step-overs as well as at compressionalstep-overs. Upon initial reading, this result would appear tocontradict the results of the current work’s elastodynamicanalysis. Sibson (1985, 1986) explains this observation byarguing that when rupture hits a dilational step-over, the sud-den decrease in normal stress causes small mode-I cracks toopen up in the step-over region. This increase in crack vol-
ume would lead to a suction force that would inhibit thefurther propagation of rupture across the step-over, andcould even reduce the ability of rupture to nucleate on sec-ondary faults in the step-over region. Harris and Day (1993)used a nonzero Skempton coefficient as a proxy for such aneffect in their dynamic models of fault step-overs with nolinking faults. Their analysis confirmed that the coseismicdecrease in pore-fluid pressure in the dilational step-overregion could greatly reduce the probability of through-goingrupture. Modeling this sort of effect is beyond the scope ofthe current work. However, reasonable assumptions aboutthe Skempton coefficient (i.e., being less than unity) wouldimply that a dilational step-over should still produce a netreduction in the normal stress in the step-over region, whichshould still relatively favor rupture propagation across a di-lational step-over compared to the case of a compressionalstep-over, or to cases with no linking dip-slip fault.
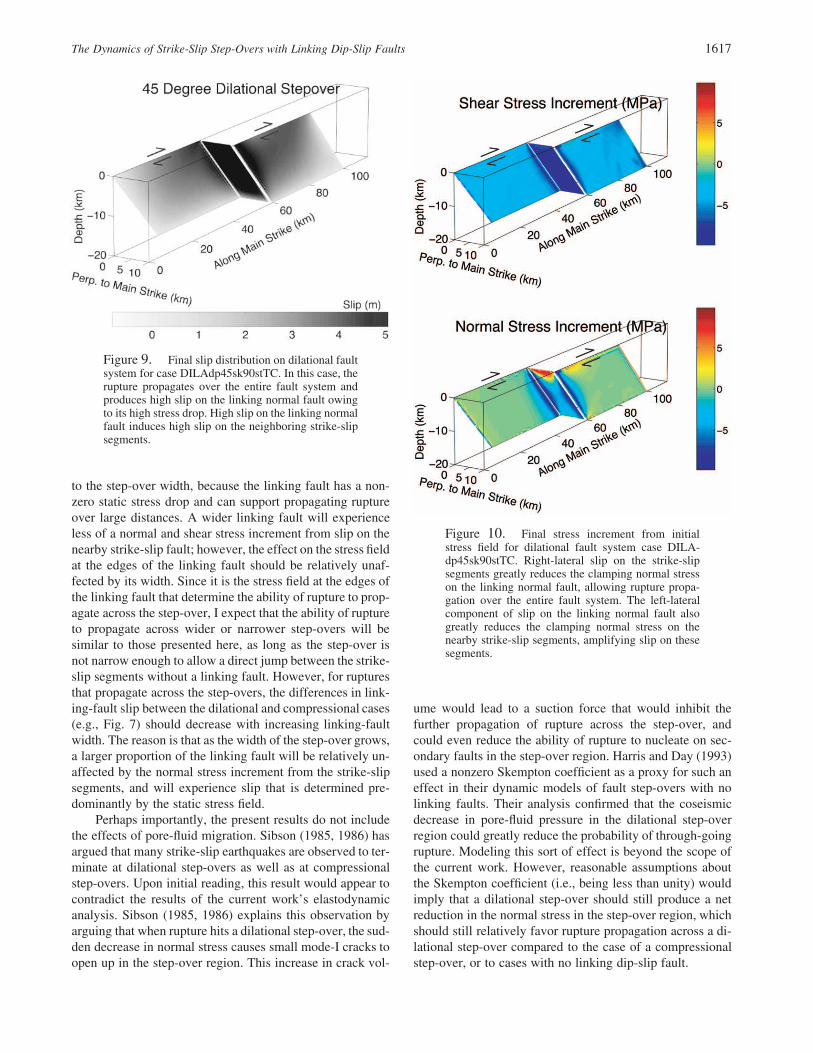
Figure 9. Final slip distribution on dilational faultsystem for case DILAdp45sk90stTC. In this case, therupture propagates over the entire fault system andproduces high slip on the linking normal fault owingto its high stress drop. High slip on the linking normalfault induces high slip on the neighboring strike-slipsegments.
Figure 10. Final stress increment from initialstress field for dilational fault system case DILA-dp45sk90stTC. Right-lateral slip on the strike-slipsegments greatly reduces the clamping normal stresson the linking normal fault, allowing rupture propa-gation over the entire fault system. The left-lateralcomponent of slip on the linking normal fault alsogreatly reduces the clamping normal stress on thenearby strike-slip segments, amplifying slip on thesesegments.
1618 D. D. Oglesby
There are, however, many reasons why rupture mightterminate at dilational step-overs even though they are rela-tively more favorable for rupture than compressional step-overs. First, step-overs in nature often have a significantoverlap between the strike-slip fault segments (e.g., Brank-man and Aydin, 2004; Wakabayashi et al., 2004). As thecurrent results show, such an overlap greatly inhibits thepropagation of rupture across the step-over. Also, the currentresults assume that the linking dip-slip faults come veryclose (within 500 m) to the strike-slip segments. Experi-ments with larger separation (along the strike of the linkingfault) between the strike-slip and linking faults indicate thatthe ability of rupture to propagate through the step-over de-creases significantly if there is a large gap between the link-ing and strike-slip segments. In addition, a normal fault in adilational step-over may have a very low average stresslevel, which could lead to a very low stress drop on thissegment. Such a low stress drop may not release enoughenergy to nucleate slip on the secondary strike-slip segment.Finally, I note that while there may be many examples ofrupture terminating at dilational stepovers, there are alsomany examples (e.g., Wesnousky, 1988) of rupture propa-gating through dilational step-overs.
In addition to arguing that dilational step-overs may beeasier for rupture to propagate through than compressionalstepovers, the current results also indicate that there are faultgeometries for which rupture can propagate to a linkingthrust fault and across a compressional step-over. A shallowfault dip or a smaller change in strike between the strike-slip and thrust fault segments both bring the linking thrustfault closer to an optimal orientation for failure and slip; inboth cases, the compressive normal stress increment is min-
imized while the shear stress increment is maximized. How-ever, it must be pointed out that even though rupture canpropagate across the compressional step-over in some cases,the slip on the fault system (especially on the linking fault)is less than on an equivalent dilational step-over owing tothe stress interaction between the fault segments. The factthat through-propagating rupture is so strongly suppressedin the models with orthogonal thrust and strike-slip faultsmay help to explain why such a fault geometry is rare innature: rather rapidly such an orthogonal fault will lock up,leading to either the creation of a new, more favorably ori-ented fault, or simply the production of more anelastic be-havior (such as folding) in the step-over region.
Another faulting configuration that aids in the propa-gation of rupture across compressional stepovers is the caseof nucleation on the linking thrust fault. In such a case, thelinking thrust fault slips before it experiences the compres-sional stress increment from the strike-slip fault segments.As long as the strike-slip component of slip on the linkingthrust fault does not clamp the adjacent strike-slip segments,a centrally nucleating rupture can propagate across a step-over that is impossible to cross for a rupture that nucleateson one of the strike-slip segments. This observation mayhelp to explain why compressional step-overs may be bothbarriers to rupture and nucleation points for large events, asargued by Segall and Pollard (1980). The importance of thehypocenter location and rupture order is a dynamic effectthat is not captured in many static faulting models, such asthat by Muller and Aydin (2004); this effect could be quiteimportant in evaluating the probability of large events in astep-over region.
In the current work, stress interaction between the link-
Figure 11. (a) Final slip distribution on dilational fault system for case DILA-dp45sk90stTC with nucleation on the linking normal fault (segment 2). As in the caseof nucleation on strike-slip segment 1, the rupture propagates over the entire faultsystem. (b) Final slip distribution on compressional fault system for caseCOMPdp45sk90stTC with nucleation on the linking normal fault (segment 2). Ruptureonly propagates on the linking thrust fault.
The Dynamics of Strike-Slip Step-Overs with Linking Dip-Slip Faults 1619
ing dip-slip faults and the nearby strike-slip faults lead tonormal faults having significantly higher slip than equivalentthrust faults. This result is in marked contrast to the behaviorof dip-slip faults in isolation (Brune, 1996; Oglesby et al.,1998; Shi et al., 1998; Oglesby et al., 2000a,b), for whichthe stress interaction with the free surface can produce sig-nificantly higher slip on the thrust fault than on an otherwiseequivalent normal fault. The current results serve to empha-size the crucial importance that fault–fault interactions mayhave on the dynamics of the rupture process. In this case,the stress interaction with neighboring faults dominates theeffect of the free surface. The positive feedback between thestrike-slip faults and the linking normal fault in the dilationalstep-over leads to amplified slip on all the fault segments,while the opposite is true for the compressional step-over.A second effect that emphasizes the two-way interaction be-tween the fault segments is the rotation in rake seen whenrupture propagates across the entire fault system. Analogous
rake rotation has also been seen in the quasi-static modelsof Muller and Aydin (2004) and the dynamic models ofGuatteri and Spudich (1998), Oglesby and Day (2001) andH. Aochi et al. (unpublished manuscript, 2005). The resultsargue that constraining slip to take place only in the directionof the static prestress field may be inappropriate for faultsystems with complex geometry and substantial fault–faultstress interactions.
A final point concerning the current results is the natureof the assumed stress field. The current stress assumptionslead to faults with an S value of 1.0 over most of the system.Experiments with lower S values (not shown) indicate thata lower S facilitates through-going rupture propagation inboth the compressional and dilational cases. A more com-plicated issue is heterogeneity in the stress field. While aregional stress field (which is used in the majority of thecurrent models) is a common assumption for dynamic mod-els, it may not be the most appropriate assumption for faultsystems with complex geometry. Multicycle dynamic mod-els of a strike-slip fault with a change in strike (Duan andOglesby, 2005) indicate that over multiple earthquakes,stress buildups near geometrical discontinuities take on acrucial role in rupture and slip evolution. The posteventstress distribution in the current models (e.g., Fig. 10) issignificantly more heterogeneous than the initial regionalstress field. Unless this incremental stress field is largelyrelaxed before the next earthquake, the behavior of the faultsystem may be qualitatively different in the long term fromthe current models. In particular, the lowered normal stressin the dilational step-over could lead to the normal fault be-ing a preferred location for nucleation of future large events.Such long-term models of geometrically complex fault sys-tems are the subject of future work.
Conclusions
Dynamic models of strike-slip faults with step-oversand linking dip-slip faults indicate that the presence of alinking fault can greatly increase the ability of earthquakerupture to propagate across the step-over and lead to a largerevent. This effect is even stronger for dilational step-oversthan compressional step-overs owing to the sign of the nor-mal stress increment on the linking fault: slip on the strike-slip segments tends to unlock a linking normal fault in adilational step-over, while it tends to lock up a linking thrustfault in a compressional step-over. The current results helpto explain why fault step-overs may serve as both barriersto rupture propagation and preferred locations for large eventnucleation. Although the current models are quite simplified,the fundamental results above are robust with respect to as-sumptions about stress field and fault geometry. The resultsmay have important implications for evaluating the proba-bility of large earthquake events near step-overs in strike-slip faults, such as numerous locations along the San An-dreas fault system in California.
Figure 12. Final stress increment from the initialstress field for compressional fault system caseCOMPdp45sk90stTC with nucleation on the linkingthrust fault (segment 2). The right-lateral strike-slipcomponent of slip on the linking thrust fault raises theclamping normal stress on the adjacent strike-slip seg-ments, preventing rupture propagation beyond thelinking thrust fault.
1620 D. D. Oglesby
Figure 13. (a) Final slip distribution on dilational fault system for case DILA-dp60sk90stTC. With an even more favorable orientation for the linking fault than inthe 45�-dipping case, rupture propagates across the entire fault system. (b) Final slipdistribution on compressional fault system for case COMPdp30sk90stTC. With a morefavorable orientation for the linking fault than in the 45�-dipping case, rupture propa-gates to the linking thrust fault. However, the strike-slip component of slip on thelinking fault causes a clamping normal stress increase on strike-slip segment 3, pre-venting rupture from continuing beyond the linking thrust fault.
Figure 14. (a) Final slip distribution on a dilational fault system for case DILA-dp45sk45stTC. As in all cases with dilational step-overs, rupture propagates across theentire fault system. (b) Slip distribution on a compressional fault system for caseCOMPdp60sk90stTC. Because of the linking thrust fault’s more favorable orientationwith respect to both the regional stress field and the dynamic stress field from the strike-slip faults, rupture is able to propagate across the entire fault system. However, slip inthis system is still less than in the equivalent dilational fault system, owing to the effectof the clamping normal stress on sliding frictional stress.
The Dynamics of Strike-Slip Step-Overs with Linking Dip-Slip Faults 1621
Acknowledgments
The author would like to thank David Bowman, James Dieterich,Benchun Duan, Martin Kennedy, Peter Sadler, and Michael Vredevoogdfor many helpful conversations concerning this project. The manuscript wasgreatly improved through reviews by Ruth Harris and an anonymous re-viewer. This work was inspired by conversations with Tom Parsons. Thisresearch was supported in part by the Southern California Earthquake Cen-ter. SCEC is funded by NSF Cooperative Agreement EAR-0106924 andUSGS Cooperative Agreement 02HQAG0008. The SCEC contribution num-ber for this paper is 923.
References
Aagaard, B. T., G. Anderson, and K. W. Hudnut (2004). Dynamic rupturemodeling of the transition from thrust to strike-slip motion in the 2002Denali fault, Alaska, earthquake, Bull. Seism. Soc. Am. 94, no. 6B,S190–S201.
Anderson, G., B. Aagaard, and K. Hudnut (2003). Fault interactions andlarge complex earthquakes in the Los Angeles Area, Science 302,1946–1949.
Andrews, D. J. (1976a). Rupture propagation with finite stress in antiplanestrain, J. Geophys. Res. 81, 3575–3582.
Andrews, D. J. (1976b). Rupture velocity of plane strain shear cracks, J.Geophys. Res. 81, 5679–5687.
Andrews, D. J. (1999). Test of two methods for faulting in finite-differencecalculations, Bull. Seism. Soc. Am. 89, 931–937.
Aochi, H., and E. Fukuyama (2002). Three-dimensional nonplanar simu-lation of the 1992 Landers earthquake, J. Geophys. Res. 107, doi10.1029/2000JB000061.
Aochi, H., E. Fukuyama, and R. Madariaga (2002). Effect of normal stressduring rupture propagation along nonplanar faults, J. Geophys. Res.107, doi 10.1029/2001JB000500.
Aochi, H., E. Fukuyama, and M. Matsu�ura (2000a). Selectivity of spon-taneous rupture propagation on a branched fault, Geophys. Res. Lett.27, 3635–3638.
Aochi, H., E. Fukuyama, and M. Matsu�ura (2000b). Spontaneous rupturepropagation on a nonplanar fault in 3-D elastic medium, Pageoph 157,2003–2027.
Bonafede, M., and A. Neri (2000). Effects induced by an earthquake on itsfault plane: a boundary element study, Geophys. J. Int. 141, 43–56.
Bouchon, M., and D. Streiff (1997). Propagation of a shear crack on anonplanar fault: a method of calculation, Bull. Seism. Soc. Am. 87,61–66.
Brankman, C. M., and A. Aydin (2004). Uplift and contractional defor-mation along a segmented strike-slip fault system: the Gargano Prom-ontory, southern Italy, J. Struct. Geol. 26, 807–824.
Brune, J. N. (1996). Particle motions in a physical model of shallow anglethrust faulting, Proc. Indian Acad. Sci. (Earth Planet. Sci.) 105,L197–L206.
Courboulex, F., N. Deichmann, and J.-C. Gariel (1999). Rupture complex-ity of a moderate intraplate earthquake in the Alps: the 1996 M5Epagny-Annecy earthquake, Geophys. J. Int. 139, 152–160.
Day, S. M. (1982). Three-dimensional simulation of spontaneous rupture:the effect of nonuniform prestress, Bull. Seism. Soc. Am. 72, 1881–1902.
Dreger, D., D. D. Oglesby, R. A. Harris, N. Ratchkovsky, and R. Hansen(2004). Kinematic and dynamic rupture models of the November 3,2002 Mw 7.9 Denali, Alaska, earthquake, Geophys. Res. Lett. 31,L04605, doi 10.1029/2003GL018333.
Duan, B., and D. D. Oglesby (2005). Multicycle dynamics of nonplanarstrike-slip faults, J. Geophys. Res. 110, doi:10.1029/2004JB003298.
Geist, E. L., and M. Zoback (1999). Analysis of the tsunami generated bythe MW 7.8 San Francisco earthquake, Geology 27, 15–18.
Guatteri, M., and P. Spudich (1998). Coseismic temporal changes of slipdirection: the effect of absolute stress on dyamic rupture, Bull. Seism.Soc. Am. 88, 777–789.
Harris, R. A., and S. M. Day (1993). Dynamics of fault interaction—parallelstrike-slip faults, J. Geophys. Res. 18, 4461–4472.
Harris, R. A., and S. M. Day (1999). Dynamic 3D simulations of earth-quakes on en echelon faults, Geophys. Res. Lett. 98, 2089–2092.
Harris, R. A., R. J. Archuleta, and S. M. Day (1991). Fault steps and thedynamic rupture process—2-D numerical simulations of a spontane-ously propagating shear fracture, Geophys. Res. Lett. 26, 893–896.
Harris, R. A., J. F. Dolan, R. Hartleb, and S. M. Day (2002). The 1999Izmit, Turkey, earthquake: a 3D dynamic stress transfer model ofintraearthquake triggering, Bull. Seism. Soc. Am. 92, 245–255.
Ida, Y. (1972). Cohesive force across the tip of a longitudinal shear crackand Griffith’s specific surface energy, J. Geophys. Res. 77, 3796–3805.
Kame, N., J. R. Rice, and R. Dmowska (2003). Effects of pre-stress stateand rupture velocity on dynamic fault branching, J. Geophys. Res.108, 2265, doi 10.1029/2002JB002189.
Kase, Y., and K. Kuge (1998). Numerical simulation of spontaneous rup-ture processes on two non-coplanar faults: the effect of geometry onfault interaction, Geophys. J. Int. 135, 911–922.
Kase, Y., and K. Kuge (2001). Rupture propagation beyond fault discon-tinuities: significance of fault strike and location, Geophys. J. Int. 147,330–342.
Lin, A., J. Guo, and B. Fu (2004). Co-siesmic mole track structures pro-duced by the 2001 Ms 8.1 Centrul Kunlun earthquake, China, J.Struct. Geol. 26, 1511–1519.
Magistrale, H., and S. M. Day (1999). 3D simulations of multi-segmentthrust fault rupture, Geophys. Res. Lett. 26, 2093–2096.
Muller, J. R., and A. Aydin (2004). Rupture progression along discontin-uous oblique fault sets: implications for the Karadere rupture segmentof the 1999 Izmit earthquake, and future rupture in the Sea of Mar-mara, Tectonophysics 391, 283–302.
Nielsen, S. B. (1998). Free surface effects on the propagation of dynamicrupture, Geophys. Res. Lett. 25, 125–128.
Oglesby, D. D. (1999). Earthquake dynamics on dip-slip faults, Ph.D. The-sis, University of California, Santa Barbara.
Oglesby, D. D., and S. M. Day (2001). Fault geometry and the dynamicsof the 1999 Chi-Chi (Taiwan) earthquake, Bull. Seism. Soc. Am. 91,1099–1111.
Oglesby, D. D., R. J. Archuleta, and S. B. Nielsen (1998). Earthquakes ondipping faults: the effects of broken symmetry, Science 280, 1055–1059.
Oglesby, D. D., R. J. Archuleta, and S. B. Nielsen (2000a). The dynamicsof dip-slip faults: explorations in two dimensions, J. Geophys. Res.105, 13,643–13,653.
Oglesby, D. D., R. J. Archuleta, and S. B. Nielsen (2000b). The three-dimensional dynamics of dipping faults, Bull. Seism. Soc. Am. 90,616–628.
Oglesby, D. D., S. M. Day, Y.-G. Li, and J. E. Vidale (2003). The 1999Hector Mine earthquake: the dynamics of a branched fault system,Bull. Seism. Soc. Am. 93, 2459–2476.
Oglesby, D. D., D. Dreger, R. A. Harris, N. A. Ratchkovski, and R. Hansen(2004). Inverse kinematic and forward dynamic models of the 2002Denali fault earthquake, Alaska, Bull. Seism. Soc. Am. 94, S214–S233.
Palmer, A. C., and J. R. Rice (1973). The growth of slip surfaces in theprogressive failure of overconsolidated clay, Proc. R. Soc. London A332, 527–548.
Parsons, T., R. W. Sliter, E. L. Geist, R. C. Jachens, B. E. Jaffe, A. Fox-grover, P. E. Hart, and J. McCarthy (2003). Structure and mechanicsof the Hayward–Rodgers Creek fault step-over, San Francisco Bay,California, Bull. Seism. Soc. Am. 93, 2187–2200.
Segall, P., and D. D. Pollard (1980). Mechanics of discontinuous faults,J. Geophys. Res. 85, 4337–4350.
1622 D. D. Oglesby
Shi, B., A. Anooshehpoor, and Y. Zeng (1998). Dynamics of thrust faulting:2D lattice model, Bull. Seism. Soc. Am. 88, 1484–1494.
Sibson, R. H. (1985). Stopping of earthquake ruptures at dilational faultjogs, Nature 316, 248–251.
Sibson, R. H. (1986). Rupture interaction with fault jogs, in EarthquakeSource Mechanics, S. Das, J. Boatwright, and C. H. Scholz (Editors),American Geophysical Monograph 37, 157–167.
Wakabayashi, J., J. V. Hengesh, and T. L. Sawyer (2004). Four-dimen-sional transform fault processes: progressive evolution of step-oversand bends, Tectonophysics 392, 279–301.
Wesnousky, S. G. (1988). Seismological and structural evolution of strike-slip faults, Nature 335, 340–343.
Whirley, R. G., and B. E. Engelmann (1993). DYNA3D: A Nonlinear, Ex-plicit, Three-Dimensional Finite Element Code for Solid and Struc-tural Mechanics. User Manual, University of California, LawrenceLivermore National Laboratory, UCRL-MA-1107254 Rev. 1.
Yamashita, T., and Y. Umeda (1994). Earthquake rupture complexity dueto dynamic nucleation and interaction of subsidiary faults, Pageoph143, 89–115.
Yule, D., and K. E. Sieh (2003). Complexities of the San Andreas faultnear San Gorgonio Pass: Implications for large earthquakes, J. Geo-phys. Res. 108, doi 10.1029/2001JB000451.
Zampier, D., M. Massironi, R. Sedea, and V. Sparacino (2003). Strike-slipcontractional stepovers in the Southern Alps, Eclogae Geol. Helv. 96,115–123.
Zoback, M., R. C. Jachens, and J. A. Olson (1999). Abrupt along-strikechange in tectonic style: San Andreas fault zone, San Francisco Pen-insula, J. Geophys. Res. 104, 10,719–10,742.
Department of Earth SciencesUniversity of California, RiversideRiverside, California 92521