The Unilever R&D Colworth controlled traffic farming project Abstract A controlled traffic trial was set up in the Autumn of 2004 on a Hanslope clay soil at Unilever R&D Colworth, Sharnbrook in Bedfordshire. The 6.67 m primary module system used machinery with a common track width of 3 m and non-sown tramlines at 20 m centres. The permanent wheelways at 6.67 m centres were established during harvesting with a John Deere 9880 STS combine equipped with autosteer coupled to an on-board StarFire GPS guidance system. Subsequent levelling of the site and infilling of the wheelways was conducted using a fast and shallow pass of a power harrow. Two weeks later the site was sprayed with glyphosate and drilled two days later with a John Dale Zero Till drill. Winter wheat was sown as part of a five-year cereal, oilseeds and pulse rotation and comparisons were made with conventionally trafficked adjacent non-replicated blocks of land in the same rotation but managed with non-inversion tillage (min till), direct drilling and ploughing. Following the first set of controlled traffic wheelings, site conditions were recorded in terms of cone penetration resistance and moisture content to a depth of 0.5 m. Measurements were taken in the new “bed” areas, in single and repeated wheel pass positions and in the old crop tramlines. Results showed that the old tramlines were 108 mm below the surrounding bed areas and the new wheelways some 98 mm lower. Cone resistance after the first harvester pass had an effect to 300 mm depth, but where a second pass occurred, this increased the resistance more than proportionally and to a greater depth. The latter was also the case when the harvester passed over the old tramlines when little additional compaction occurred in the upper layers, but there was an increase in resistance deeper in the profile. Further measurements in January 2006, which included data from adjacent conventionally trafficked areas, suggested a contrasting and lower resistance on ploughed and controlled traffic soil in the top 30 cm of the profile compared with trafficked minimum tillage and direct drilled land. On average, penetration resistance on the non-trafficked areas suggested that crop roots would experience less resistance and to a greater depth than they would in the adjacent wheeled areas. Soil structure on the controlled traffic area was observed within 12 months of its introduction to be more favourable than on all the trafficked blocks. The order of good structure was CTF, ploughing, minimum tillage followed by direct drilling. This was supported by limited water infiltration measurements that suggested a fivefold increase in infiltration on the controlled traffic compared with the trafficked direct drilled area and a threefold increase compared with minimum tillage. Results on the ploughed soil suggested a fivefold increase in infiltration compared with controlled traffic, but there was evidence that infiltration was impeded at plough depth. None of these data have been tested for statistical significance. Wheat growth in the first year of the trial was interrupted by accidental desiccation, but oilseed rape harvested in 2006 returned a yield of 4.2 t ha -1 , which was comparable to yields from the adjacent blocks of land. However, the plants on the CTF area were larger than their counterparts and there was evidence of more branching of the root system in the topsoil suggesting perhaps less impedance to root growth. The satellite guidance system proved both convenient and essential to the ease with which the controlled traffic system could be introduced and managed. There was little evidence of significant error in matching of passes, as indicated by spacing of the drilled crops and the width of the wheelways. The trial will continue as a demonstration of the principles of controlled traffic as well as aiming to show that significant soil, crop, environmental and management benefits can be experienced alongside lower production costs and increased crop returns. Equally, the ideas for implementation on individual farms will be further developed and the essence of a robust protocol for CTF implementation will be worked upon and tested. Report compiled by Tim Chamen, November 2006 4C’easons Agriculture & Environment, Church Close Cottage, Maulden, Bedford MK445 2AU Tel 01525 405121 E-mail: [email protected]www.controlledtrafficfarming.com
Transcript
The Unilever R&D Colworth controlled traffic farming project
Abstract A controlled traffic trial was set up in the Autumn of 2004 on a Hanslope clay soil at Unilever R&D Colworth, Sharnbrook in Bedfordshire. The 6.67 m primary module system used machinery with a common track width of 3 m and non-sown tramlines at 20 m centres. The permanent wheelways at 6.67 m centres were established during harvesting with a John Deere 9880 STS combine equipped with autosteer coupled to an on-board StarFire GPS guidance system. Subsequent levelling of the site and infilling of the wheelways was conducted using a fast and shallow pass of a power harrow. Two weeks later the site was sprayed with glyphosate and drilled two days later with a John Dale Zero Till drill. Winter wheat was sown as part of a five-year cereal, oilseeds and pulse rotation and comparisons were made with conventionally trafficked adjacent non-replicated blocks of land in the same rotation but managed with non-inversion tillage (min till), direct drilling and ploughing. Following the first set of controlled traffic wheelings, site conditions were recorded in terms of cone penetration resistance and moisture content to a depth of 0.5 m. Measurements were taken in the new “bed” areas, in single and repeated wheel pass positions and in the old crop tramlines. Results showed that the old tramlines were 108 mm below the surrounding bed areas and the new wheelways some 98 mm lower. Cone resistance after the first harvester pass had an effect to 300 mm depth, but where a second pass occurred, this increased the resistance more than proportionally and to a greater depth. The latter was also the case when the harvester passed over the old tramlines when little additional compaction occurred in the upper layers, but there was an increase in resistance deeper in the profile. Further measurements in January 2006, which included data from adjacent conventionally trafficked areas, suggested a contrasting and lower resistance on ploughed and controlled traffic soil in the top 30 cm of the profile compared with trafficked minimum tillage and direct drilled land. On average, penetration resistance on the non-trafficked areas suggested that
crop roots would experience less resistance and to a greater depth than they would in the adjacent wheeled areas. Soil structure on the controlled traffic area was observed within 12 months of its introduction to be more favourable than on all the trafficked blocks. The order of good structure was CTF, ploughing, minimum tillage followed by direct drilling. This was supported by limited water infiltration measurements that suggested a fivefold increase in infiltration on the controlled traffic compared with the trafficked direct drilled area and a threefold increase compared with minimum tillage. Results on the ploughed soil suggested a fivefold increase in infiltration compared with controlled traffic, but there was evidence that infiltration was impeded at plough depth. None of these data have been tested for statistical significance. Wheat growth in the first year of the trial was interrupted by accidental desiccation, but oilseed rape harvested in 2006 returned a yield of 4.2 t ha-1, which was comparable to yields from the adjacent blocks of land. However, the plants on the CTF area were larger than their counterparts and there was evidence of more branching of the root system in the topsoil suggesting perhaps less impedance to root growth. The satellite guidance system proved both convenient and essential to the ease with which the controlled traffic system could be introduced and managed. There was little evidence of significant error in matching of passes, as indicated by spacing of the drilled crops and the width of the wheelways. The trial will continue as a demonstration of the principles of controlled traffic as well as aiming to show that significant soil, crop, environmental and management benefits can be experienced alongside lower production costs and increased crop returns. Equally, the ideas for implementation on individual farms will be further developed and the essence of a robust protocol for CTF implementation will be worked upon and tested.
Report compiled by Tim Chamen, November 2006 4C’easons Agriculture & Environment, Church Close Cottage, Maulden, Bedford MK445 2AU
Tel 01525 405121 E-mail: [email protected] www.controlledtrafficfarming.com
Project objectives The project aims to: • Trial and demonstrate all aspects of controlled traffic farming. • Show that CTF can be reliably achieved and sustained with existing equipment, on a practical scale
and in a commercial environment. • Identify unique selling points associated with the technologies that will deliver benefits to the
commercial partners. • Assess and confirm where possible, improvements in soil conditions resulting from continued use of
CTF. • Ascertain, and where possible quantify, the economic and environmental benefits of a CTF regime. • Establish present constraints to a CTF system based on existing machinery and propose means to
remove or overcome such constraints in a cost-effective and practical manner.
What we have done so far The project has been running for two complete seasons in an 8 ha level field on a Hanslope clay soil. During this time we have sown three crops and harvested two. Accidental desiccation of the first crop required that we replace the winter wheat with spring barley at the end of April 2005. This was followed by oilseed rape, which due a drill metering problem, was established using tine tillage (the drill), broadcasting and rolling rather than direct drilling. The principal machinery was: John Deere 8520 ILS tractor with 3 m track width front and rear 6.67 m wide John Dale Zero Till drill with wheels on a 3 m track width 20 m mounted spray and fertilizer applicators 7.6 m wide John Deere STS harvester with 3 m track width The tractor and harvester were fitted with a John Deere Starfire satellite receiver and both were equipped with autosteer and parallel tracking with a claimed accuracy of ± 10 cm. The harvester was also capable of “curve tracking”. We therefore had a system that allowed us to create parallel tracks at 6.6 m centres, every third one of which was used for chemical applications at 20 m centres. The intermediate wheelways were sown and the harvester worked with a cutting width of 6.6 m rather than its full width capability. The permanent tracks were set up when beans were harvested in September 2004. Because the soil was very moist, the harvester created ruts about 100 mm (4”) deep and we immediately filled these by running a borrowed 6 m power harrow shallow and fast across the field at 6.6 m centres. From then on, only the John Dale drill has disturbed the soil, but rolls have also been used to firm the seedbeds. We did not deep loosen the soil at the outset, partly because of the very moist conditions, but also because examination showed that the profile was not damaged excessively above plough depth.
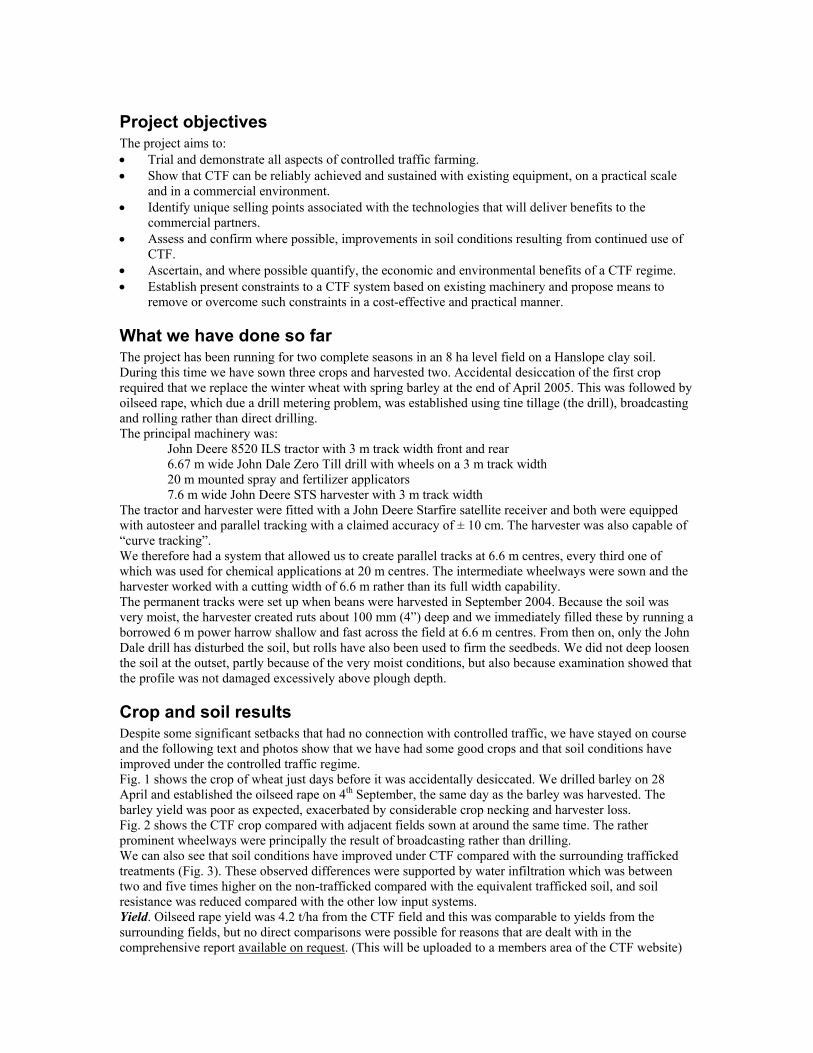
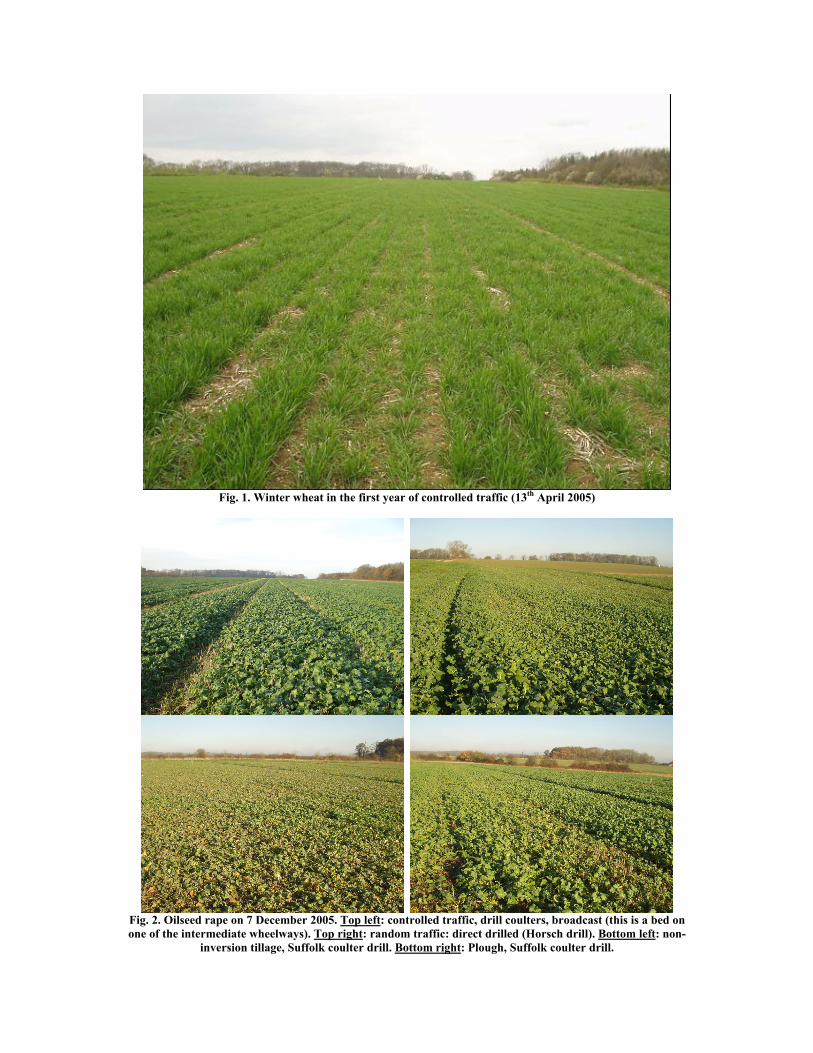
Crop and soil results Despite some significant setbacks that had no connection with controlled traffic, we have stayed on course and the following text and photos show that we have had some good crops and that soil conditions have improved under the controlled traffic regime. Fig. 1 shows the crop of wheat just days before it was accidentally desiccated. We drilled barley on 28 April and established the oilseed rape on 4th September, the same day as the barley was harvested. The barley yield was poor as expected, exacerbated by considerable crop necking and harvester loss. Fig. 2 shows the CTF crop compared with adjacent fields sown at around the same time. The rather prominent wheelways were principally the result of broadcasting rather than drilling. We can also see that soil conditions have improved under CTF compared with the surrounding trafficked treatments (Fig. 3). These observed differences were supported by water infiltration which was between two and five times higher on the non-trafficked compared with the equivalent trafficked soil, and soil resistance was reduced compared with the other low input systems. Yield. Oilseed rape yield was 4.2 t/ha from the CTF field and this was comparable to yields from the surrounding fields, but no direct comparisons were possible for reasons that are dealt with in the comprehensive report available on request. (This will be uploaded to a members area of the CTF website)
Fig. 1. Winter wheat in the first year of controlled traffic (13th April 2005)
Fig. 2. Oilseed rape on 7 December 2005. Top left: controlled traffic, drill coulters, broadcast (this is a bed on one of the intermediate wheelways). Top right: random traffic: direct drilled (Horsch drill). Bottom left: non-
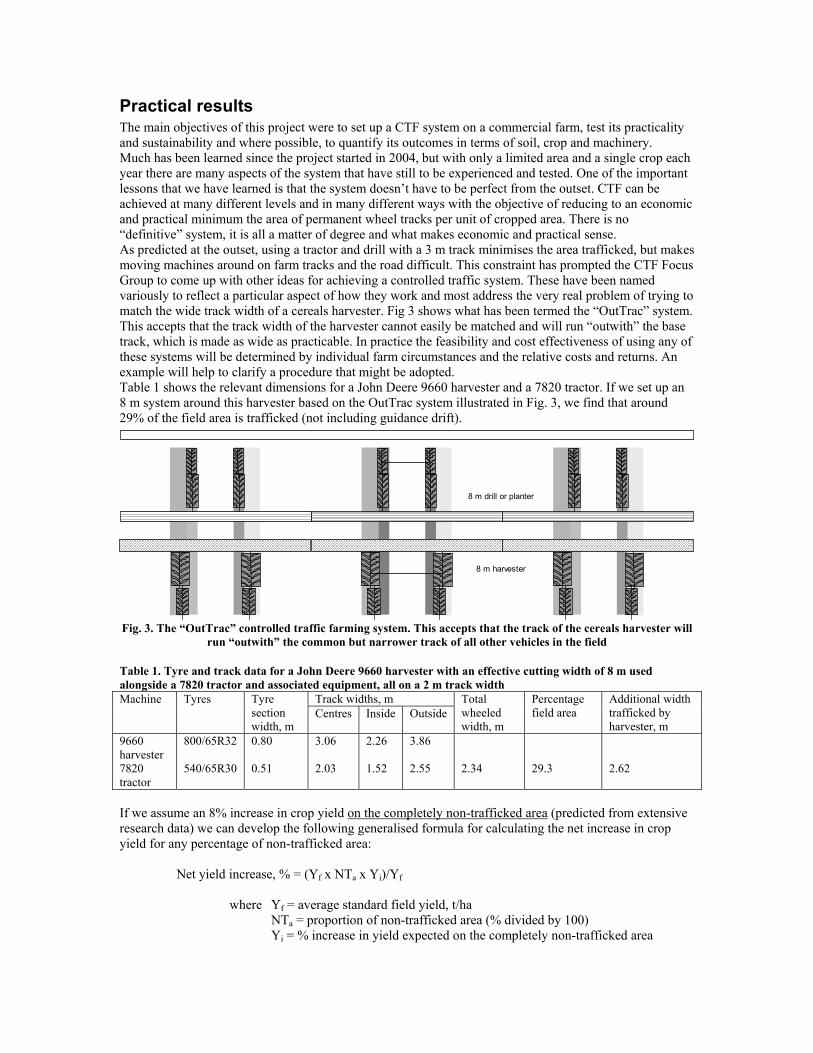
Practical results The main objectives of this project were to set up a CTF system on a commercial farm, test its practicality and sustainability and where possible, to quantify its outcomes in terms of soil, crop and machinery. Much has been learned since the project started in 2004, but with only a limited area and a single crop each year there are many aspects of the system that have still to be experienced and tested. One of the important lessons that we have learned is that the system doesn’t have to be perfect from the outset. CTF can be achieved at many different levels and in many different ways with the objective of reducing to an economic and practical minimum the area of permanent wheel tracks per unit of cropped area. There is no “definitive” system, it is all a matter of degree and what makes economic and practical sense. As predicted at the outset, using a tractor and drill with a 3 m track minimises the area trafficked, but makes moving machines around on farm tracks and the road difficult. This constraint has prompted the CTF Focus Group to come up with other ideas for achieving a controlled traffic system. These have been named variously to reflect a particular aspect of how they work and most address the very real problem of trying to match the wide track width of a cereals harvester. Fig 3 shows what has been termed the “OutTrac” system. This accepts that the track width of the harvester cannot easily be matched and will run “outwith” the base track, which is made as wide as practicable. In practice the feasibility and cost effectiveness of using any of these systems will be determined by individual farm circumstances and the relative costs and returns. An example will help to clarify a procedure that might be adopted. Table 1 shows the relevant dimensions for a John Deere 9660 harvester and a 7820 tractor. If we set up an 8 m system around this harvester based on the OutTrac system illustrated in Fig. 3, we find that around 29% of the field area is trafficked (not including guidance drift).
Fig. 3. The “OutTrac” controlled traffic farming system. This accepts that the track of the cereals harvester will run “outwith” the common but narrower track of all other vehicles in the field
Table 1. Tyre and track data for a John Deere 9660 harvester with an effective cutting width of 8 m used alongside a 7820 tractor and associated equipment, all on a 2 m track width
Track widths, m Machine Tyres Tyre section width, m
Centres Inside Outside Total wheeled width, m
Percentage field area
Additional width trafficked by harvester, m
9660 harvester 7820 tractor
800/65R32 540/65R30
0.80 0.51
3.06 2.03
2.26 1.52
3.86 2.55
2.34
29.3
2.62
24 m chemical application
8 m drill or planter
8 m harvester
If we assume an 8% increase in crop yield on the completely non-trafficked area (predicted from extensive research data) we can develop the following generalised formula for calculating the net increase in crop yield for any percentage of non-trafficked area: Net yield increase, % = (Yf x NTa x Yi)/Yf where Yf = average standard field yield, t/ha NTa = proportion of non-trafficked area (% divided by 100) Yi = % increase in yield expected on the completely non-trafficked area
If we assume an average field yield Yf of 9 t/ha, the net yield increase will be: (9 x 0.71 x 8)/9 = 5.68%, which in this case is 0.51 t/ha (9 x 0.0568).
Fig. 4. Components of marker pins used to reposition vehicles exactly in the prescribed traffic lanes. From top: blanking pin, extension tube, base pin and driving mandrel
At a world price of £63/t ($100/t) this equates to around £32/ha ($60/ha or £3200 per 100 ha per annum. The AdTrac system would increase the benefit with little added complication providing satellite guidance were used. Global positioning systems (GPS) are a key enabling technology for CTF, making the transition from random trafficking simpler, more accurate and adding other key benefits. The only difference in the way GPS is used for CTF compared with conventional practice is that there is a keen interest in ensuring that traffic returns to exactly the same position year in year out. This can be achieved easily by adopting the “real time kinematic” (RTK) system. The additional cost is around £13,000 for the base station including peripherals, less the cost of correction signal licence fees for SF2. Depending on usage this could be around £500 per annum. Without RTK, the system at Colworth is relying on marker pins. These cost around £50 for each field and consist of a tube that is knocked below tillage depth, but which has an extension piece fitted when in use, or a cap with marker line when the extension needs to be removed (Fig. 4). These have only been introduced since we extended the CTF area so we have little experience of how well they will worPositioning them so that every machine can easily access them at any time during an operation has demanded considerable thought and the success of this has yet to be tested.
k.
What we have learned so far This report deals with the first two years of an ongoing trial that still has many of its varied objectives to meet, but we have already learned a great deal, as indicated below.
1. Although we have achieved CTF with commercial equipment, the 3 m axle tractor is unlikely to be a practical option for most farmers in the UK or Europe. Viable alternatives have been identified and these are gradually being introduced on the farms of collaborating partners.
2. Machinery operators have found the system easy to operate and are now accepting that more thought and discipline are needed to avoid excessive headland wheeling.
3. Although CTF can be achieved with physical markers, satellite guidance provides a more convenient, accurate and acceptable alternative. Experience also suggests that the most effective solution incorporates an autosteer facility; this relieves driver stress and delivers a more accurate solution.
4. The question of whether RTK is needed for CTF rests on two connected but separate issues. In terms of the additional accuracy (c. ± 2 cm rather than c. ± 10 cm), this in most cases will simply mean that the width of the wheelways is minimised, as will be the associated loss in yield. What may be more important is that RTK can place vehicles exactly on track without the need for marker pins. We will only know the value of this with further experience.
5. Not all partners have identified unique selling points associated with CTF, but some have and we are working closely with them and our other partners to develop these aspects.
6. Improvements in soil conditions have been both measured and observed and are in line with research results from a wide range of sources. More observations and data will be accrued over the next few years.
7. Although a crude economics prediction based on yield data from other sources has been started, a more rigorous assessment is needed and this will be undertaken within the next six months.
8. Constraints to CTF adoption have been found to rely principally on perceptions. As a means of overcoming this constraint, a “tier” approach to CTF has been identified and four tiers will be
proposed. These will be based on ranges in the area percentage of land impacted by wheels or tracks in a given field position. It is considered that this tier approach will allow us to develop novel ideas and tactics that will permit most farmers to consider CTF as an option.
9. In preparing for the extended area of CTF on the Colworth farm we deep loosened some of the fields. Partly this was to address known soil problems but it was also undertaken to provide a comparison between loosened and non-loosened soil where two fields were being cropped similarly. In carrying out this and subsequent operations we were immediately aware that deep loosening should not be in the same direction as the proposed permanent wheelways. Primarily this was because the drill coulters would often follow the leg slot of the subsoiler and sow too deeply.
10. We need to deal with the reality that large quantities of poorly spread chopped straw left after harvesting interfere with subsequent crop establishment, particularly when soil moisture levels rise and particularly in the presence of desiccated volunteer crop. Until October 2006, this had not been a problem at Colworth, but severe difficulties became apparent when trying to establish wheat after wheat. Although there were aspects of the drill modification that might have exacerbated this problem, their remedy would not have avoided the issue altogether. We need to consider the machine and/or approach that will address this problem because with CTF we are not able, as happens with normal practice, to cultivate or drill at an angle to the preceding crop.
11. Combine harvester straw chopping and spreading techniques should be improved. This problem is not confined to controlled traffic and is being exacerbated by wider cutting tables. The present engineering of straw and chaff spreading is fundamentally flawed and consumes increasing amounts of engine power with very little positive outcome. The design should be revisited and the laws of physics carefully considered – light materials cannot be thrown far and air assistance is extremely costly in power!
12. We need a protocol for CTF adoption. This is firmly on the agenda and a draft will shortly be put forward for consideration.
Future of the trial As most of you will know, from August 2006 the controlled traffic system has been extended from the present single 8 ha field, to a total of 73 ha and 9 fields. This reflects the confidence of the farm staff in the system and a desire to exploit more fully the area potential of the equipment. The fact of 9 fields will allow us to grow all crops in the rotation simultaneously and to trial the system more quickly and extensively. We have also switched to an 8 m implement system with an associated 24 m chemical application. To help satisfy the commercial and research needs of the industrial partners involved, Unilever has headed up an application for government Arable LINK funding. If this bid is successful, Cranfield University and other partners will use the site to measure soil quality indicators. This will not have any negative impact on what we are doing, but will enhance the value of our results. It will mean reducing the area actually under CTF, but not the number of crops we are growing at any one time. In addition, having submitted a concept note to HGCA we have been invited to prepare a full proposal to be completed by the beginning of December. If successful, this will build on the value of the LINK project, but most importantly, it will provide us with resources to take detailed measurements of fuel use compared with conventional practice and to study the relative economics.
People and partners The initiation, progress and expansion of this project have been enabled principally by the enthusiasm of the growers involved. This has given our commercial partners the confidence to invest of their time and resources. The great value of this partnership is the discussions at meetings and during visits that allow new ideas and opportunities to be identified. I believe that we are close to achieving a number of robust CTF systems that will be increasingly sustainable on a range of soils and different cropping systems. Already we have seen one of our partners introduce a CTF system on his farm and a number of others have “projects in progress”. Of particular importance to the project will be our workshop on 22 Nov. 06. We have planned informal discussions centred on the key topics identified over the past two years and hope that with your help, everyone can take away clear ideas of how to make CTF work. I hope you will make every effort to be there and share your thoughts and expertise.