Revised 2012 1 C21 THE UNIVERSITY OF HONG KONG DEPARTMENT OF ELECTRICAL & ELECTRONIC ENGINEERING Experiment C21: Servo Position Control System Objectives: To study the characteristics and measure the parameters of a servo position control system, and to investigate the effect of proportional and velocity feedback. Apparatus: Feedback servo trainer with a mechanical unit & an analogue unit; Digital storage oscilloscope; Digital voltmeter. Introduction Fig. 1 shows a servo position control system in which a load is driven by a motor through a reduction belt mechanism. The angular position θ o of the load shaft is measured using an output potentiometer. The aim of servo position control is to make θ o track a command signal θ i set by an input potentiometer. In this experiment, we will study the mechanism of a servo position control system and the effects of position and velocity feedback. To begin with, we consider the system without velocity feedback, so that the system is simply a proportional feedback system. In this case, the output position θ o is the only feedback signal. θ o is compared with the reference input θ i to give an error signal e i o = − θ θ . The purpose of the position feedback is to make θ o track θ i (i.e. to make e small). In the proportional feedback scheme, the control signal u is directly proportional to the error signal e (hence termed proportional feedback). The proportional control
Transcript
Revised 2012
1
C21
THE UNIVERSITY OF HONG KONG DEPARTMENT OF ELECTRICAL & ELECTRONIC ENGINEERING
Experiment C21: Servo Position Control System Objectives: To study the characteristics and measure the parameters of a servo position
control system, and to investigate the effect of proportional and velocity feedback.
Apparatus: Feedback servo trainer with a mechanical unit & an analogue unit; Digital storage oscilloscope; Digital voltmeter. Introduction Fig. 1 shows a servo position control system in which a load is driven by a motor through a reduction belt mechanism. The angular position θo of the load shaft is measured using an output potentiometer. The aim of servo position control is to make θo track a command signal θi set by an input potentiometer. In this experiment, we will study the mechanism of a servo position control system and the effects of position and velocity feedback.
To begin with, we consider the system without velocity feedback, so that the system is simply a proportional feedback system. In this case, the output position θo is the only feedback signal. θo is compared with the reference input θi to give an error signal e i o= −θ θ . The purpose of the position feedback is to make θo track θi (i.e. to make e small). In the proportional feedback scheme, the control signal u is directly proportional to the error signal e (hence termed proportional feedback). The proportional control
2
C21
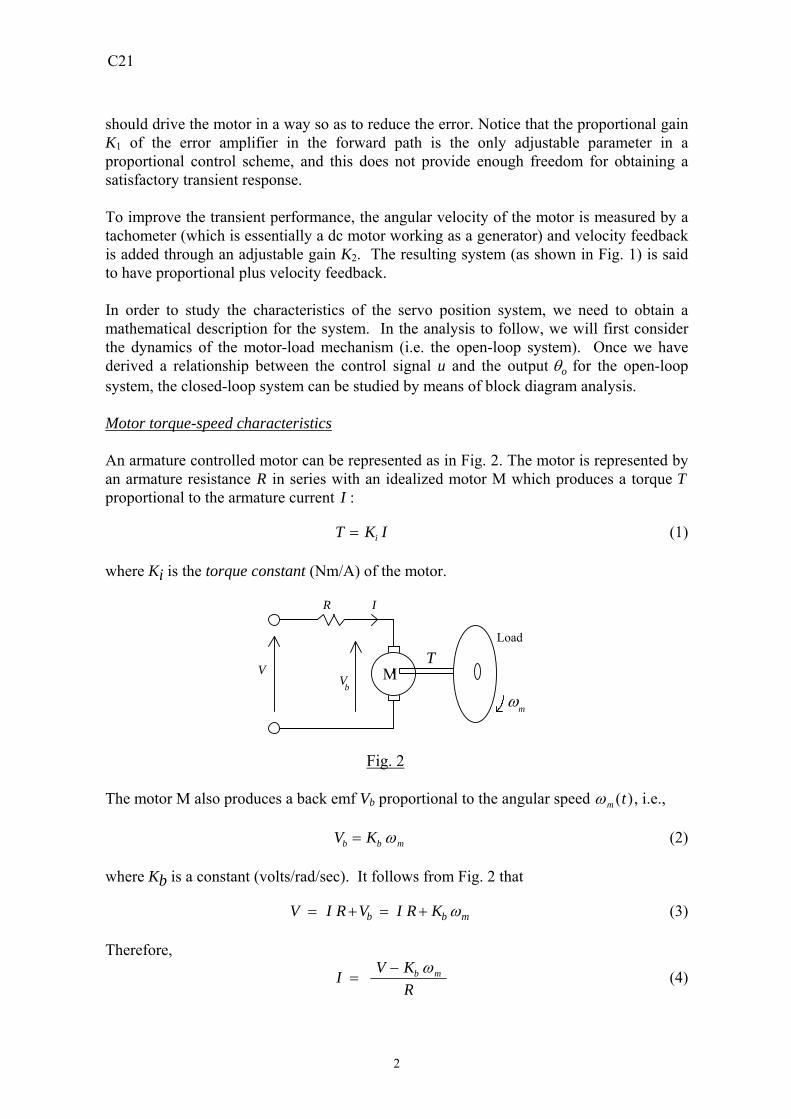
should drive the motor in a way so as to reduce the error. Notice that the proportional gain K1 of the error amplifier in the forward path is the only adjustable parameter in a proportional control scheme, and this does not provide enough freedom for obtaining a satisfactory transient response. To improve the transient performance, the angular velocity of the motor is measured by a tachometer (which is essentially a dc motor working as a generator) and velocity feedback is added through an adjustable gain K2. The resulting system (as shown in Fig. 1) is said to have proportional plus velocity feedback. In order to study the characteristics of the servo position system, we need to obtain a mathematical description for the system. In the analysis to follow, we will first consider the dynamics of the motor-load mechanism (i.e. the open-loop system). Once we have derived a relationship between the control signal u and the output θo for the open-loop system, the closed-loop system can be studied by means of block diagram analysis. Motor torque-speed characteristics An armature controlled motor can be represented as in Fig. 2. The motor is represented by an armature resistance R in series with an idealized motor M which produces a torque T proportional to the armature current I :
T K Ii= (1)
where Ki is the torque constant (Nm/A) of the motor.
ωm
M
Load
R
VVb
I
T
Fig. 2 The motor M also produces a back emf Vb proportional to the angular speed ωm t( ), i.e.,
V Kb b m= ω (2) where Kb is a constant (volts/rad/sec). It follows from Fig. 2 that
V I R V I R Kb b m= + = + ω (3) Therefore,
I V KR
b m=− ω (4)
Revised 2010
3
C21
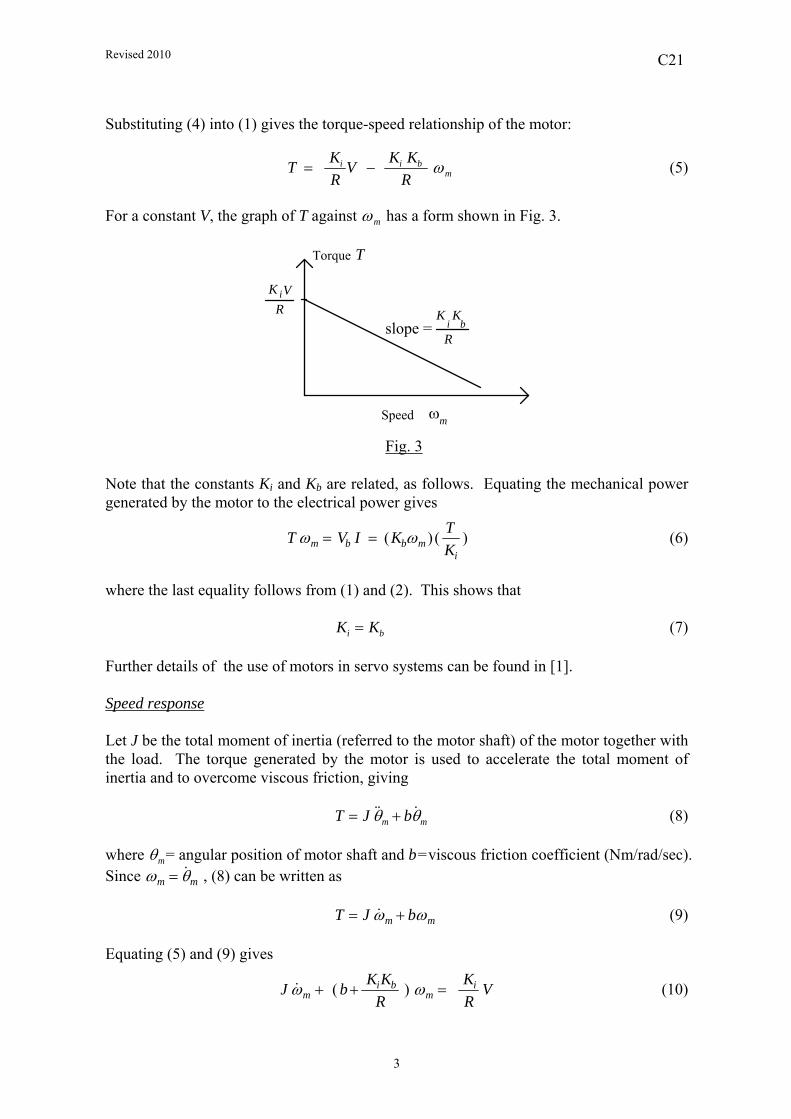
Substituting (4) into (1) gives the torque-speed relationship of the motor:
T KR
V K KR
i i bm= − ω (5)
For a constant V, the graph of T against ωm has a form shown in Fig. 3.
Torque T
Speed ωm
KiK
bR
K iR
V
Fig. 3
slope =
Note that the constants Ki and Kb are related, as follows. Equating the mechanical power generated by the motor to the electrical power gives
T V I K TKm b b m
iω ω= = ( ) ( ) (6)
where the last equality follows from (1) and (2). This shows that
K Ki b= (7) Further details of the use of motors in servo systems can be found in [1]. Speed response
Let J be the total moment of inertia (referred to the motor shaft) of the motor together with the load. The torque generated by the motor is used to accelerate the total moment of inertia and to overcome viscous friction, giving
T J bm m= +&& &θ θ (8)
where θm= angular position of motor shaft and b=viscous friction coefficient (Nm/rad/sec). Since ω θm m= & , (8) can be written as
T J bm m= +&ω ω (9)
Equating (5) and (9) gives
J b K KR
KR
Vmi b
mi& ( )ω ω+ + = (10)
4
C21
which can be written as
τ ω ω& m m mK V+ = (11) where
bi KKRbRJ
+=τ and
bi
im KKRb
KK
+= (12)
The speed response of the system is therefore governed by the differential equation (11). The differential equation can be turned into a transfer function by taking Laplace transform with zero initial conditions, giving
1+=
τω
sK
)s(V)s( mm
Let u be the control signal applied at the input of power amplifier and ωt be the velocity signal measured at the output of the tachometer (see Fig. 1). For the analysis to follow, it would be more convenient to express the speed response in terms of u and ωt . Since ω ωt m∝ and V u∝ , if we absorb the constants of proportionalities into Km (and with an abuse of notation, using the same symbol Km for the new constant), the transfer function from u to ωt is given by
ωτ
t msu s
Ks
( )( )
=+1
(13)
(13) is the speed response relating the power amplifier input to the tachometer output. Position response Note that the output position signal θo is related to the velocity signal ωt by an integral relationship:
dt)t(K)t(t
too ∫=0ωθ (14)
where Ko is a constant. The corresponding transform relationship is
sK
)s()s( o
t
o =ωθ
(15)
From (13) and (15), the position response transfer function from the power amplifier input u s( ) to the position output θo s( ) is given by
)s(sKK
)s(u)s( moo
1+=
τθ
(16)
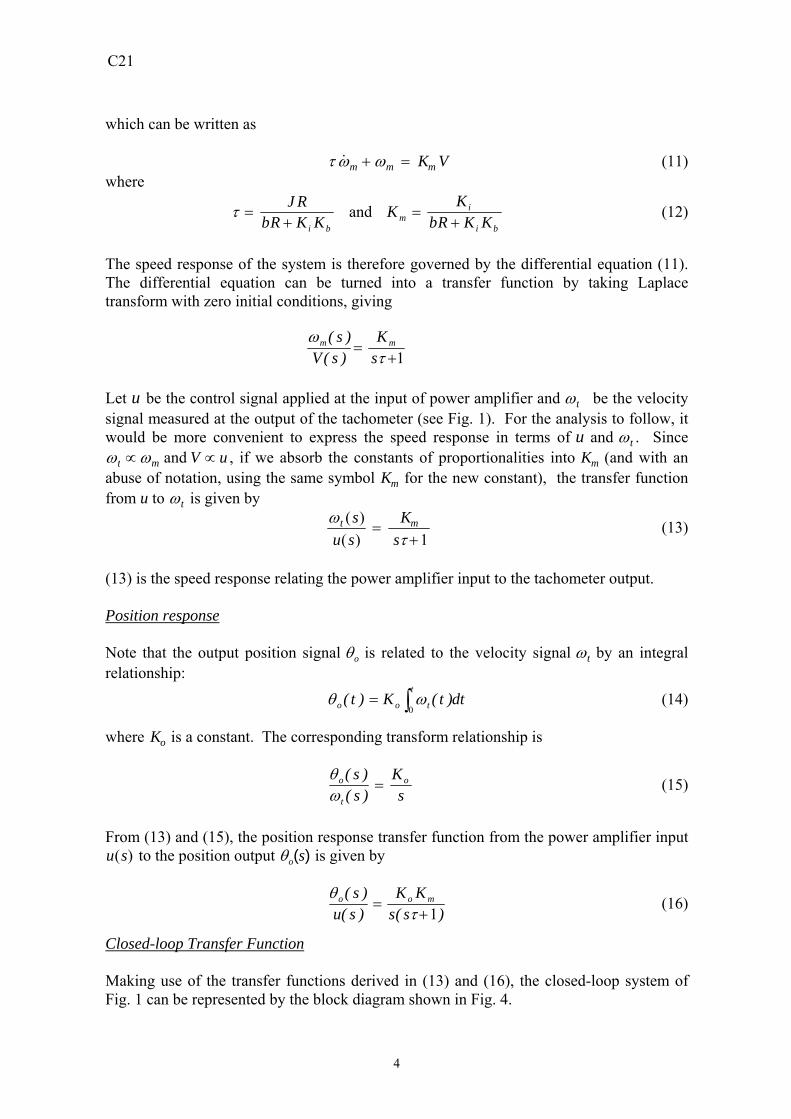
Closed-loop Transfer Function Making use of the transfer functions derived in (13) and (16), the closed-loop system of Fig. 1 can be represented by the block diagram shown in Fig. 4.
Revised 2010
5
C21
Ks +Σθ i θoK τ1
K2
s1e u
position signal
velocity signal
Fig. 4
m Ko+-
-
ω t
tachometer
From Fig. 4, the closed-loop transfer function relating θo s( ) to θi s( ) is given by
θθ
τ
τ τ
o
i
m o
m m o
ss
K K K
s K K K s K K K( )( )
=+
++
1
2 1 2 11 (17)
This is a second order system with a transfer function of the standard form
G ss
n
n n( ) =
+ +ωζω ω
2
2 22 (18)
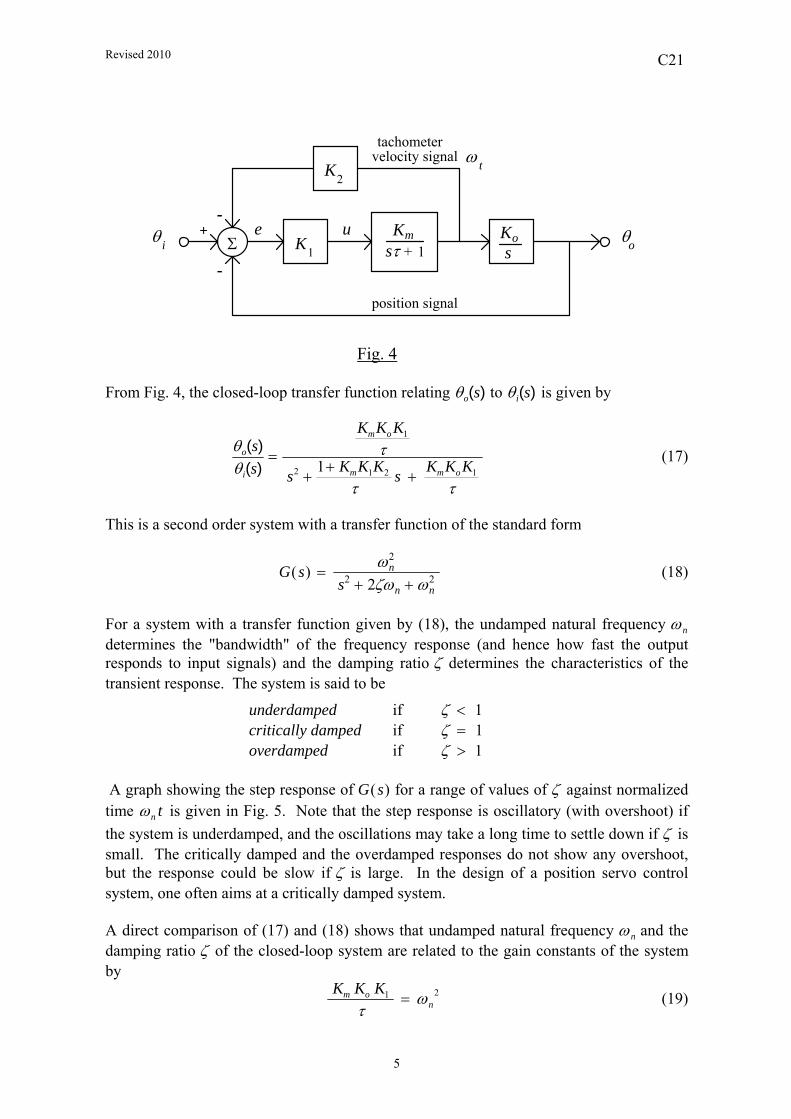
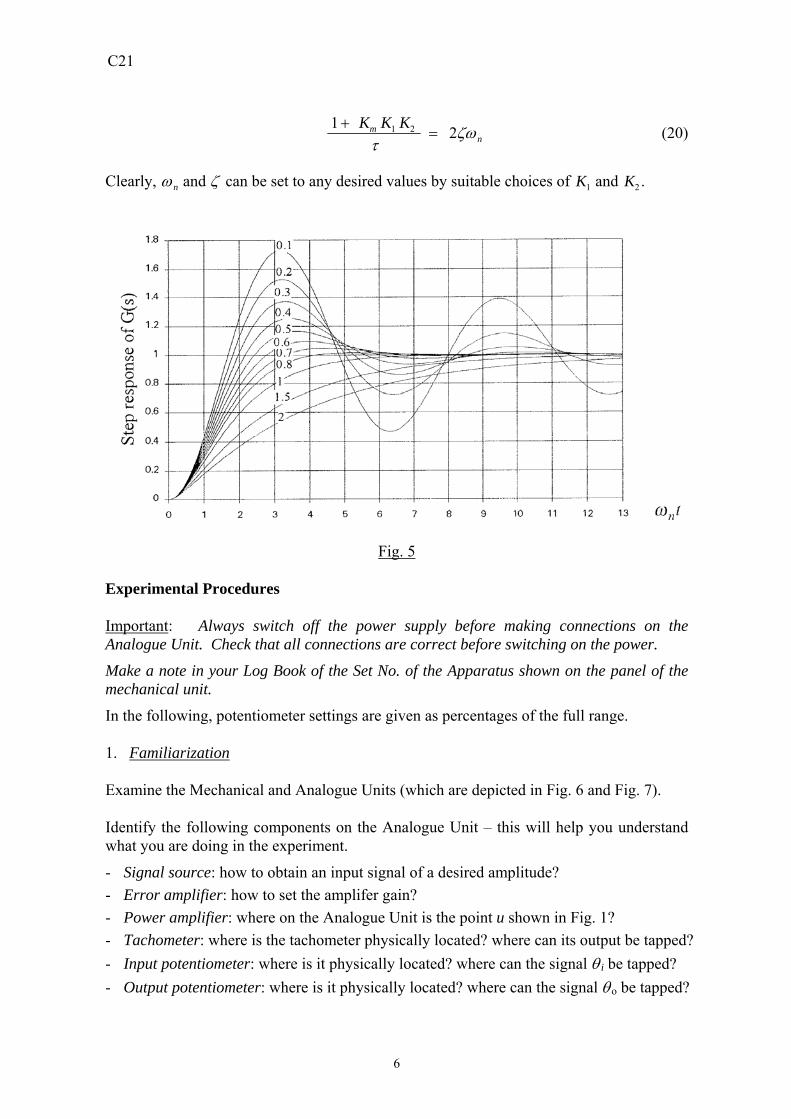
For a system with a transfer function given by (18), the undamped natural frequency ω n determines the "bandwidth" of the frequency response (and hence how fast the output responds to input signals) and the damping ratio ζ determines the characteristics of the transient response. The system is said to be
underdamped if ζ < 1 critically damped if ζ = 1 overdamped if ζ > 1 A graph showing the step response of G s( ) for a range of values of ζ against normalized time tnω is given in Fig. 5. Note that the step response is oscillatory (with overshoot) if the system is underdamped, and the oscillations may take a long time to settle down if ζ is small. The critically damped and the overdamped responses do not show any overshoot, but the response could be slow if ζ is large. In the design of a position servo control system, one often aims at a critically damped system. A direct comparison of (17) and (18) shows that undamped natural frequency ω n and the damping ratio ζ of the closed-loop system are related to the gain constants of the system by
K K Km on
1 2
τω= (19)
6
C21
1 21 2+=
K K Kmnτ
ζω (20)
Clearly, ω n and ζ can be set to any desired values by suitable choices of K1 and K2 .
Fig. 5 Experimental Procedures Important: Always switch off the power supply before making connections on the Analogue Unit. Check that all connections are correct before switching on the power.
Make a note in your Log Book of the Set No. of the Apparatus shown on the panel of the mechanical unit.
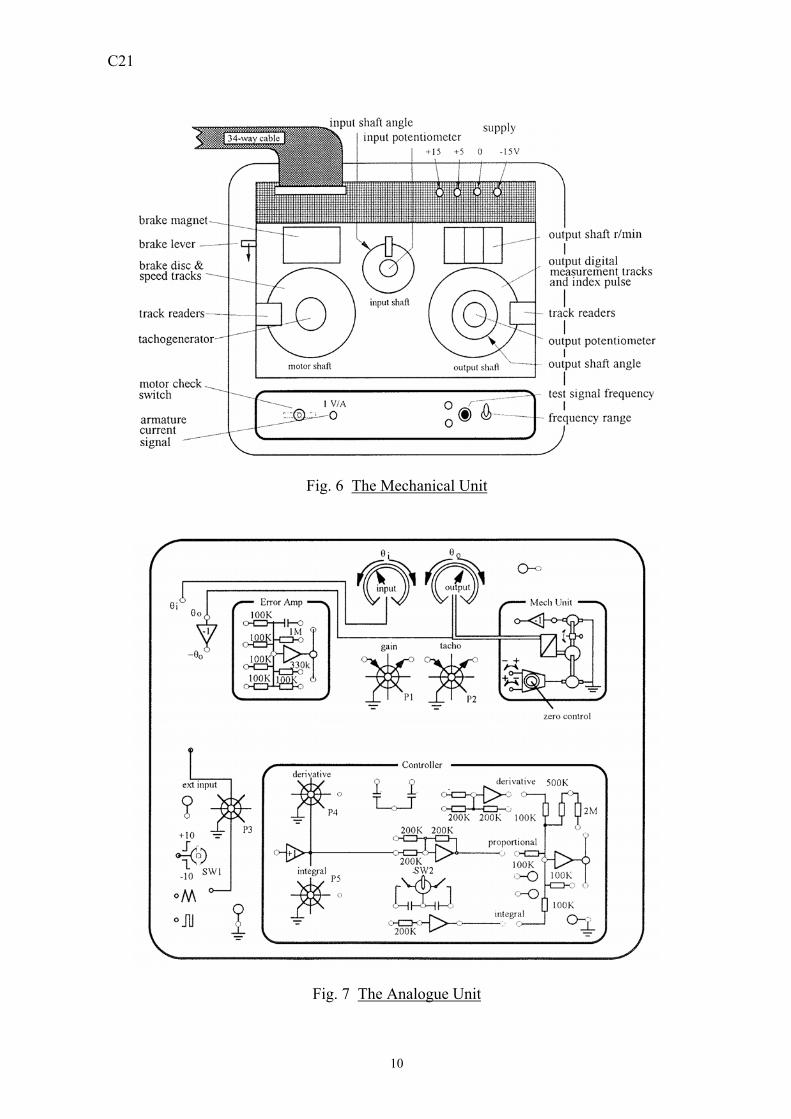
In the following, potentiometer settings are given as percentages of the full range. 1. Familiarization Examine the Mechanical and Analogue Units (which are depicted in Fig. 6 and Fig. 7). Identify the following components on the Analogue Unit – this will help you understand what you are doing in the experiment.
- Signal source: how to obtain an input signal of a desired amplitude? - Error amplifier: how to set the amplifer gain? - Power amplifier: where on the Analogue Unit is the point u shown in Fig. 1? - Tachometer: where is the tachometer physically located? where can its output be tapped? - Input potentiometer: where is it physically located? where can the signal θ i be tapped? - Output potentiometer: where is it physically located? where can the signal θo be tapped?
Revised 2010
7
C21
Ensure that no connections are made on the Analogue Unit, switch the power supply ON. The motor may revolve. Turn the power amplifier zero control knob (clockwise and anticlockwise) on the Analog Unit and see that this control can be adjusted to drive the motor in both directions. Adjust the zero knob to its central position so that the motor is stopped. Hold the motor-check switch (on the Mechanical Unit) to one side (+V) and then to the other side (-V) and check that the motor runs clockwise and then anti-clockwise. Note that the output shaft speed (in rpm) can be read on the digital display on the Mechanical Unit. (There is a reduction ratio of 32:1 between the motor shaft speed and the output shaft speed. Hence a motor speed of 1000 rpm will show up as 31 rpm on the digital display.) Find out what kind of instrumentation is used for angular position and speed measurements on the Analogue Unit, and include your findings in the report. 2. Motor torque-speed characteristics Connect up the Analogue Unit as shown in Fig. 8 with P3 initially set to zero. Switch on the power. Note that P3 enables a voltage in the range 10V to be applied to the power amplifier. Gradually increase the setting of P3 to run the motor speed up to 2000 rpm (62 rpm at the output shaft) with the magnetic brake fully upwards. Measure the voltage at the input of the power amplifier. Connect the voltmeter to measure the armature current as shown in Fig. 8. Set the brake successively to
62
61 , , ... , 1 along the scale by the side of the Mechanical Unit. For each
brake setting read the angular speed of the output shaft on the digital display and record the armature current which has been converted to a voltage measurable at the terminal labelled 1V/A (i.e., 1 volt per amplere) on the Mechanical Unit (see Fig. 6). Plot the armature current versus the motor speed. For the plotting, scale your speed readings to refer to the motor shaft and express the result in rad/sec. Compare your results with the general form given in Fig. 3. Assuming that the power amplifier has a gain of 3.0, determine the parameters R and Kb from your graph. You should do the plotting and the calculations during the laboratory session. Note: For the rest of the experiment, leave the magnetic brake at its uppermost position. 3. Steady-state speed response With the same connections as in Experiment 2, set P3 to a fixed value and use a DVM to measure the voltage u at the input of the power amplifier and the speed signal ω t (in the form of a voltage) at the output of the tachometer. Repeat this for a few settings of P3. The ratio ω t u should be approximately constant, being equal to the dc gain Km of the transfer function given by (13).
8
C21
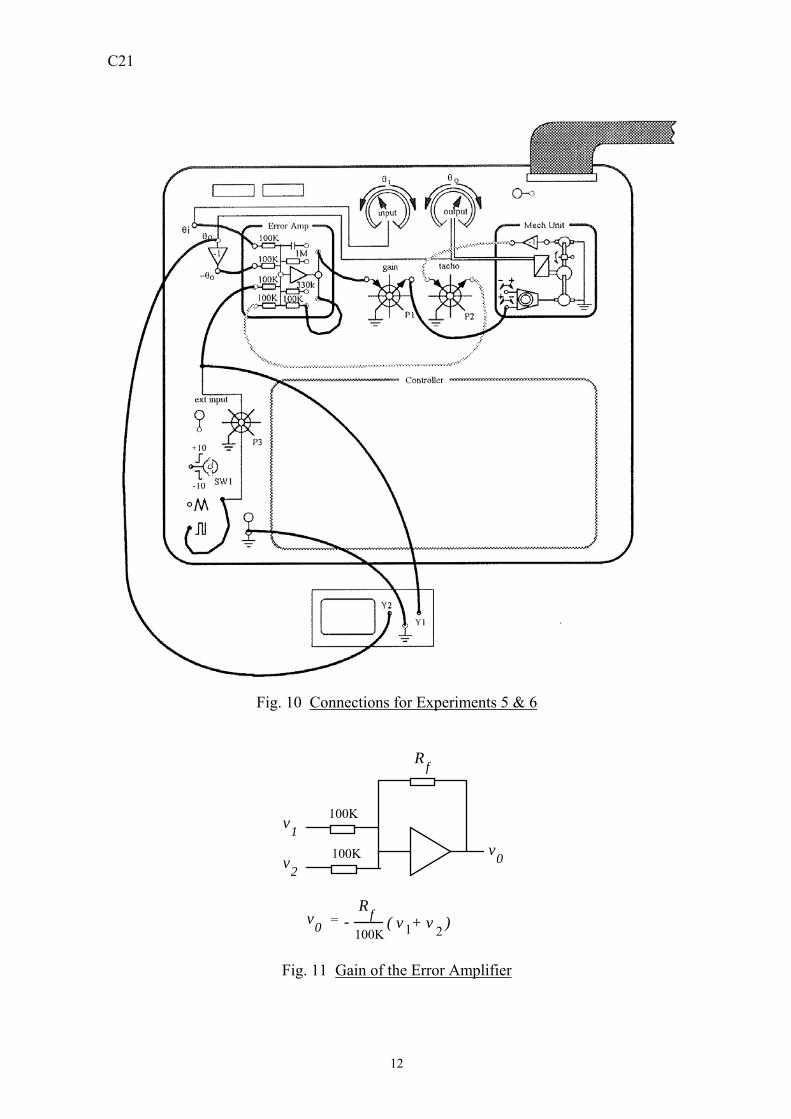
4. Transient speed response Connect the Analogue Unit as in Fig. 9 with P1 set to zero, P3 set to 25 and the input shaft angle θi (on the Mechanical Unit) set to 0. Note that the input potentiometer is simply used to generate a dc offset voltage in this experiment. Set the test signal frequency (using knobs on the Mechanical Unit) to 0.1 Hz. Switch on the power. Adjust the input potentiometer and P3 so that a square wave with lower and upper levels equal to 0 V and +5 V is obtained at the output of the error amplifier. Then, increase P1 to 100. Record the speed response at the output of the tachometer. The speed response should have a form shown in Fig. 9. From the speed response obtained, determine the time constant τ and the gain Km. As a check, compare the value of Km with that obtained in Experiment 3. 5. Position control with proportional feedback The step response of the position control system with proportional feedback will now be investigated to show the effect of variation of forward path gain. Note that the error amplifier can be configured as shown in Fig. 11. The error amplifier serves as a summing node where two or more signals are summed and then amplified by a gain factor K1 determined by the feedback resistor Rf . Connect up the Analog Unit as shown in Fig. 10. Do not make the gray connections yet. Set the error amplifier feedback resistor to 100 kΩ, giving an amplifier gain = 1. Initially set both P1 and P3 to zero. Turn the input potentiometer to zero position (θ i = 0). Set the signal frequency to 0.1 Hz. Switch on the power. Set P1 to 50. (What is the corresponding value of K1?) Adjust P3 to 50 (to provide a +5V square wave). Record the step response. Observe whether the response is overdamped. Repeat with P1 increased to 100 and note the effect of increasing the forward path gain. Reduce P3 to zero and see if you can use the input potentiometer to control the output potentiometer to any desired position (say 90o). Is the tracking satisfactory? Switch off the power. Set the feedback resistor to 330 kΩ and keep P1 at 100. (What is the value of K1 now?) To avoid overloading the error amplifier, set P3 to 15. Switch on the power and record the step response. This should now show some overshoot as increasing the proportional gain has the effect of reducing the damping ratio. Switch off the power. Set the feedback resistor to 1 M and keep P1 at 100. (What is the value of K1 now?) Switch on the power and record the step response. Observe that the response should become even more oscillatory.
Revised 2010
9
C21
6. Proportional and Velocity Feedback Use the same connection diagram (Fig. 10) as in the last experiment, but now set the error amplifier feedback resistor to 330 KΩ to give a gain = 3.3. Make the gray connections to incorporate velocity feedback. Initially set both P1 and P2 to zero. Set P3 to 50 and the signal frequency to 0.1 Hz. Switch on the power. Increase the setting of P1 to 100. A slightly oscillatory response should be obtained. Increase the setting of P2 to add a velocity component to the feedback signal. Adjust P2 to give a critically damped response and measure the setting of P2 for later analysis in your report. Observe that increasing P2 further will cause the response to become more overdamped, in which case the output moves relatively slowly into alignment with the input potentiometer. Reduce P2 to zero and reverse the polarity of the velocity feedback (which can be achieved by tapping the velocity signal at the output of the potentiometer before the invertor). Gradually increase the setting of P2. Observe that the response will become more and more oscillatory as P2 is increased, and finally the system will maintain self-oscillation without any input (i.e. with P3 set to zero). Explain why this is so in your report. Report Each student is required to submit a brief report for this experiment. Formal reports are not required. State the Apparatus Set No. on the Front Page of your report. There is no need to reproduce the theory section of this document in your report. The theory section of your report should be very brief (no more than two pages( to include):
(i) a derivation of the closed-loop transfer function (17) for the system shown in Fig. 4;
(ii) the relationship between K1 and K2 for the closed-loop system to be critically damped. Submit the time responses and simulation results you obtained in the experiment with brief comments and discussions as appropriate, and include any calculations you are required to perform as indicated in the experimental procedures. References [1] B.C. Kuo and F. Golnaraghi, "Automatic Control Systems", 8th edition, Wiley, 2003. [2] G.F. Franklin, J.D. Powell & A. Emami-Naeini, "Feedback control of Dynamic