19
Cooperative Traffic ICT TIVIT Results and Strategy Seminar 14.4.2009 Dipoli Hannu Hakala Technology Centre Hermia
| Date post: | 15-Jul-2015 |
| Category: |
Technology |
| Upload: | digile |
| View: | 509 times |
| Download: | 0 times |
Cooperative Traffic ICT
TIVIT Results and Strategy Seminar 14.4.2009 Dipoli
Hannu Hakala
Technology Centre Hermia

Cooperative Traffic ICT
• Vision: Traffic 2.0: Future traffic can be seen as a cooperative system, where devices, vehicles and infrastructures are context aware and capable of providing the needed information seamlessly and on time.
14.4.2009 2
Traffic 2.0 is all about location and context. Behind the scenes, the change is driven by information fusion and aggregation.

CoopTraffic, 7/2008 – 6/2012
Vehicle level System level
Sensor level User level
14.4.2009
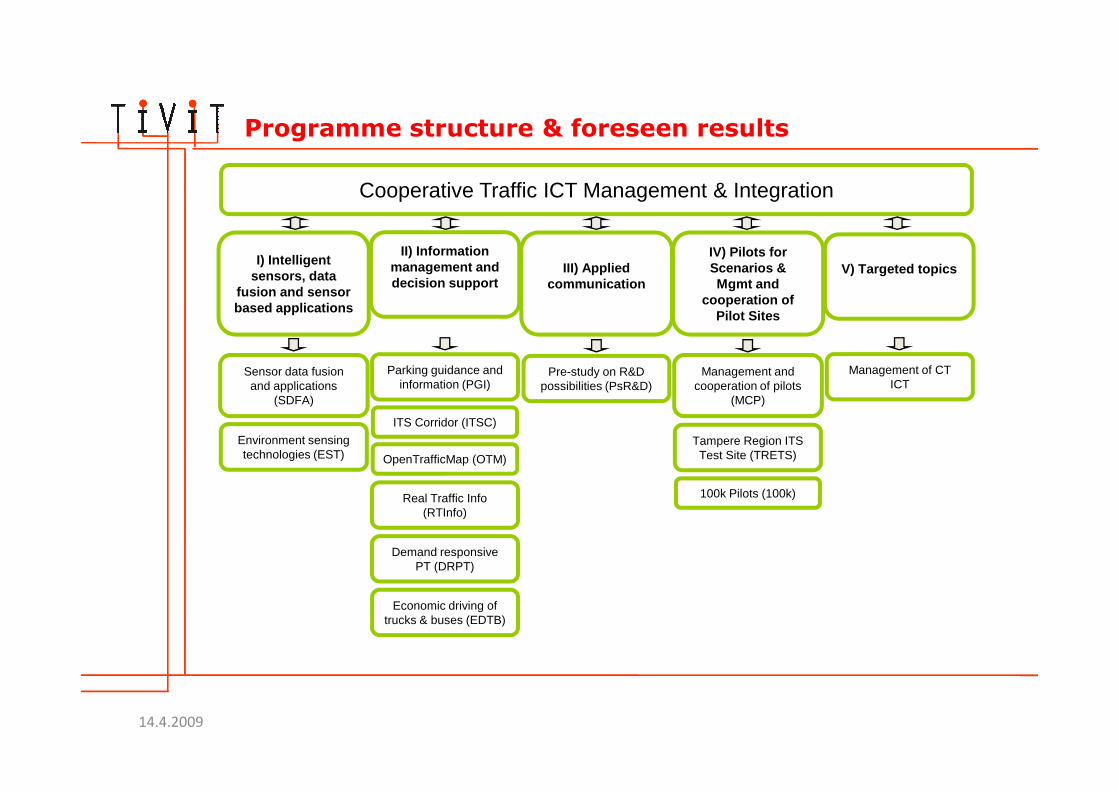
Programme structure & foreseen results
Cooperative Traffic ICT Management & Integration
I) Intelligent sensors, data
fusion and sensor based applications
II) Information management and decision support
III) Applied communication
IV) Pilots for Scenarios &Mgmt and
cooperation of Pilot Sites
V) Targeted topics
Sensor data fusion and applications
(SDFA)
Parking guidance andinformation (PGI)
Pre-study on R&D possibilities (PsR&D)
Management and cooperation of pilots
(MCP)
Management of CT ICT
(SDFA)
Environment sensing technologies (EST)
ITS Corridor (ITSC)
OpenTrafficMap (OTM)
Real Traffic Info (RTInfo)
Demand responsive PT (DRPT)
Economic driving of trucks & buses (EDTB)
(MCP)
Tampere Region ITS Test Site (TRETS)
100k Pilots (100k)
14.4.2009

Sensor Data Fusion and Applications – SDFA 1/3
Targets: Sensor data collection, data fusion methods and tools, a
toolbox of solutions, the model specification and architecture of the in-vehicle data fusion module, prototypes and demonstrators
Approaches: Two sensor data sources Nokia N95 & Instrumented
vehicle (VTT)
5
14.4.2009

Sensor Data Fusion and Applications – SDFA 2/3
Pilots & tests: Demo system: Client-server system for developing
and demonstrating data processing, fusion and presentation.
1st Case: N95 bump / pothole detector, 2nd case: Using sensors in the instrumented vehicle
Results: SoA review, scenarios, high level reqs, collected data sets,
data pre-processing, synchronisation and fusion solutions
6
14.4.2009

Sensor Data Fusion and Applications – SDFA 3/3
Pothole: 50m
2. Store sensor data
1a. Sensors:-Acceleration
-GPS
4. Visualization of recognized objects
Response:GPX format
7
1b. Sensors:-Radar-Inertial
-Acceleration-GPS
File I/O
GPX format
14.4.2009
Environment Sensing Technology – EST 1/3
Targets: to develop systems and solutions for high-accuracy radio
sensing and object recognition
Approaches: Millimeter wave frequency range, RFID-type tags to
communicate with objects (millimeter wave identification, MMID), Secondary radar principle (transponder), Vehicle-mounted or handheld device implementation
8
14.4.2009

Environment Sensing Technology – EST 2/3MMID example: Traffic assistance
Setting: Driver has a screen with visual image of road ahead + scanning MMID tag reader
Clickable items on the display:
� Destination information, driving time, road
condition, navigate (y/n)� Remaining green/red light
9
� Remaining green/red light time
� Car information (driver ID, speed)
� Passenger indicates a stop to a bus driver
Radar functionality adds distance information to
objects
14.4.2009

Environment Sensing Technology – EST 3/3
Pilots & tests: Passive imaging feasibility study, remote RFID
concept (MMID)
Results: Passive millimeter wave imaging feasibility study, System
architecture definition for MMID platform, System architecture definition for mm-wave radar platform, Simple MMID demo illustrating physical aspects of system (pointing capability/angular resolution, reading range)
10
Visual image vs. passive mm-wave image of a meeting room (94 GHz)
14.4.2009

WiSafeCar –Wireless traffic Safety network between Cars 1/2
Targets: The aim is to establish a reliable & efficient data management system for a wireless traffic service platform consisting of different wireless access technologies, by applying secure content-centric networking technique.
Approaches: Media-independent data management/forwarding scheme optimizing data flow, handling data based on its content and thus avoiding multiple transmissions of the same content over limited wireless links
VSN architecture to extract feedbacks from individual sensed data
11
VSN architecture to extract feedbacks from individual sensed dataLight-weight &real-time security countermeasure at architecture level
which enables content-centric networking and assures that the contents of all incoming packets are trustworthy and are what the node is willing to have.
14.4.2009

WiSafeCar – 2/2
EUREKA/CELTIC Project (CELTIC-ref. CP6-015)Starting in July09Participants:Finland: Mobisoft (Co-ordinator), Finnish Meteorological Institute, VTT,
Infotripla, Taipale Telematics, Sunit; France: France Telecom / Orange Labs, LASMEA (Blaise Pascal
University), TRIALOG, Paul Verlaine university of Metz, VALEO; Luxembourg: University of Luxembourg, Synergiums, CRP Henri Tudor,
Ubistream; Spain: Gradiant, ETRA I+D, MOVIQUITY, Quobis Networks, CTAG;
12
Spain: Gradiant, ETRA I+D, MOVIQUITY, Quobis Networks, CTAG;Turkey: Ford Otasan, University of Galatasaray
14.4.2009

Next steps

Programme structure
Applications, services
Content, data formats, access, infra
Devices, sensor & data fusion
Applications, services& service provision
Appliedcommunication
Technology Applications Pilots Business
14.4.2009

Current CT projects
Cooperative Traffic ICT Management & Integration
I) Intelligent sensors, data fusion and sensor based
applications
II) Information management and decision support
III) Applied communication
IV) Pilots for Scenarios &Mgmt and cooperation of
Pilot Sites
Sensor data fusion andapplications (SDFA)
Parking guidance andinformation (PGI)
Environment sensing technologies (EST)
ITS Corridor (ITSC)
Pre-study on R&D possibilities (PsR&D)
Management and cooperation of pilots (MCP)
Tampere Region ITS Test Site (TRETS)technologies (EST)
OpenTrafficMap (OTM)
Real Traffic Info (RTInfo)
Demand responsive PT (DRPT)
Economic driving of trucks & buses (EDTB)
Site (TRETS)
100k Pilots (100k)
Continuing project
Under replanning
Cancelled project
WiSafeCar New project
14.4.2009

Planning for the second year
Cooperative Traffic ICT Management & Integration
I) Intelligent sensors, data
fusion and sensor based applications
II) Information management and decision support
III) Telematics platform and
applied communication
IV) Pilots for Scenarios
V) / Technology enablers
Sensor data fusion and applications
(SDFA)
Parking guidance and information (PGI)
Pre-study on R&D possibilities (PsR&D)
Tampere Region ITS Test Site (TRETS)
Enabling pay as you drive
VI) Control room
New project
(SDFA)
Environment sensing technologies (EST)
OpenTrafficMap (OTM)
Real Traffic Info (RTInfo)
Demand responsive PT (DRPT)
Economic driving of trucks & buses
(EDTB)
100k Pilots (100k)
Continuing project Under replanning
New project
WiSafeCar
New project
New project
New project
New project
User interaction tools in a car environment
Parking system
Acceptance of the traffic ecosystem services
Field testing of 3G LTE against traffic needs
Existing ideas
14.4.2009

Timing for the second year proposal
• First get together: 23.4.09 VTT, Tampere• Preparation in theme groups during April-May
• Proposal in Tivit board 27.5.09• Delivery to Tekes 15.6.09• CT second year: 1.10.09 – 31.12.10
17
14.4.2009

Instrumented vehicle (VTT) by the front door
14.4.2009 18


















