UNIVERSITY ROLE IN ASTRONAUT LIFE SUPPORT SYSTEMS: - .. GUIDANCE AND STABILIZATION IN by Lonlzie C. Von Renner Prepared by MAN-VEHICLE LABORATORY MASSACHUSETTS INSTITUTE OF TECHNOLOGY Cambridge, Mass. 02 139 for NATIONAL AERONAUTICS AND SPACE ADMINISTRATION WASHINGTON, D. C. MARCH. 1972 https://ntrs.nasa.gov/search.jsp?R=19720011518 2018-09-08T17:20:14+00:00Z
Transcript
UNIVERSITY ROLE I N ASTRONAUT LIFE SUPPORT SYSTEMS: - .. GUIDANCE AND STABILIZATION I N
by Lonlzie C. Von Renner
Prepared by MAN-VEHICLE LABORATORY
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
Cambridge, Mass. 02 139
f o r
NATIONAL AERONAUTICS AND SPACE ADMINISTRATION WASHINGTON, D. C. MARCH. 1972
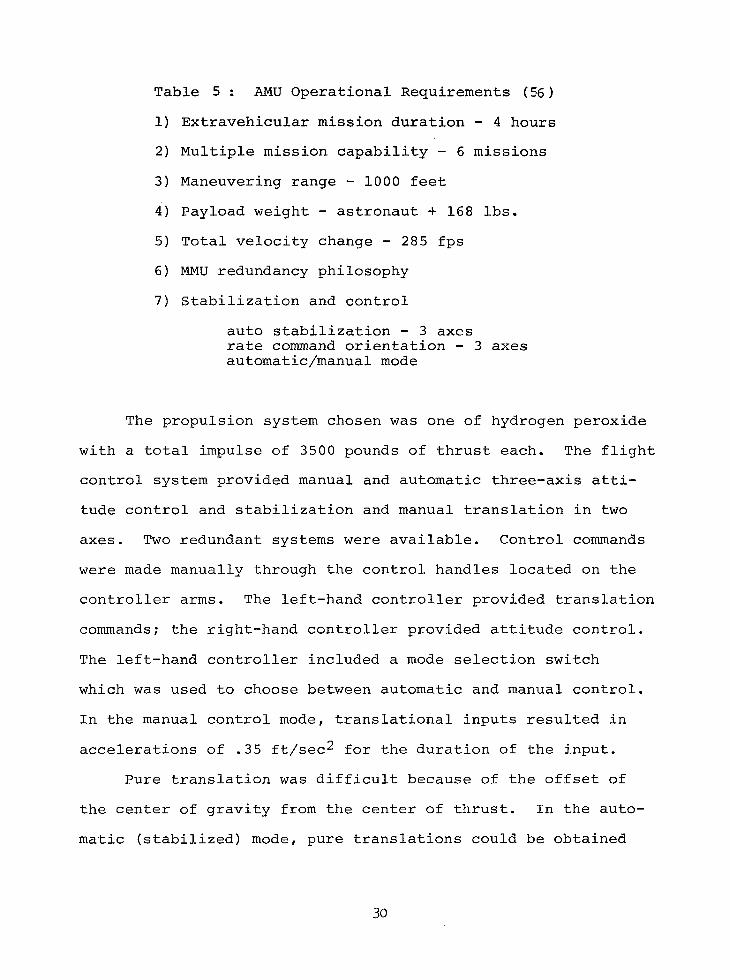
The propulsion system chosen was one of hydrogen peroxide
with a total impulse of 3500 pounds of thrust each. The flight
control system provided manual and automatic three-axis atti-
tude control and stabilization and manual translation in two
axes. Two redundant systems were available. Control commands
were made manually through the control handles located on the
controller arms. The left-hand controller provided translation
commands; the right-hand controller provided attitude control.
The left-hand controller included a mode selection switch
which was used to choose between automatic and manual control.
In the manual control mode, translational inputs resulted in
accelerations of .35 ft/sec2 for the duration of the input.
Pure translation was difficult because of the offset of
the center of gravity from the center of thrust. In the auto-
matic (stabilized) mode, pure translations could be obtained
30
Table 6: Gemini IX-A AMU Characteristics (53)
Propellant ................ 90 percent hydrogen peroxide Total thrust (fore-and-aft or up.and.down), lb ........................ 4.6
Pitch moment, in.-lb ..................... 63.5 Roll moment. in.-lb ...................... 44.2 Yaw moment. in.-lb ....................... 47.7 Specific impulse, sec .................... 169 Total impulse. lb x sec .................. 3100 Total available h V , ft/sec ............... 250 Controller characteristics: Breakout:
twist, etc. as well as rotation rates in these modes. Clearly,
subjective effort increases from zero to infinity at some
finite deflection and rotation rate.
- Conduct computer-simulated tests followed by zero-g
tests with subjects to determine feasibility of eliminating
yaw rotation as a required capability for an attitude control
sys tem.
- Study proportional versus on-off control with respect
to "naturalness" to the human reflex system and smoothness
of operation.
- Work to improve existing hand controllers. One approach
might include a single controller which can command both rota-
tion and translation.
- Study the possible effects of variable spacecraft space
suit atmospheres, background noise, and change of personnel
in operation of a voice recognition system for use in attitude
control.
-Design and evaluate a tone controller on a simple task
capable of control by incremental inputs. Measure oxygen
uptake. Determine the effect of sound initiation and the
feasibility of using portamento. Determine the nature of
any side reference that may be required, and evaluate its
effect on the pilot and the overall system. Evaluate this
45
technique in various simulated "emergency" modes.
- Survey several approaches to eye position measurement
for possible controller adaptation, given the restrictions which
such applications impose on any measuring technique.
- Design a low-volume system for control using astronaut
helmet position pick-offs in conjunction with a visual sight-
ing device for "aiming". Conduct tests.
- Perform experiments to determine subjective "effort"
as a function of head nods, turn, and tilts, their displacement
and rates of turn.
- Design and conduct experiments to determine feasibility
of electromyographic control using head movements. Determine
optimal control technique and evaluate technique in terms
of astronaut comfort, reliability, and helmet interface.
- Perform computer simulations to compare timing devices
with traditional rate sensing based on optimization of several
parameters.
- Conduct control tasks with subjects, comparing position
and rate control, considering factors such as nature of task,
shape of hand controller, and subject fatigue.
- Test acceleration command under simulated conditions
of short and long range (greater than two hundred feet)
rendezvous to determine the degree of ambiguity at greater
distances between rotation rate and target translation. Test
incorporated rate control with attitude-hold feature to optimize
time lines and fuel consumption.
46
I-
References
1.
2.
3.
4 .
5 .
6 .
7.
8.
9 .
Beasley, Gary, P . , " Inves t iga t ion o f a Simplified Maneuvering Technique," Proceedings of National Conference on Space Main- tenance and Ext ravehicu lar Ac t iv i t i e s , March 1 9 6 6 , Orlando, F lo r ida .
B e l l , Aerosystems Company, News Bureau, News Release, Sept . 17, 1968, Buffalo, New York.
Berry, C . A . , "P re l imina ry C l in i ca l Repor t of t h e Medical
Bond, Robert L . , and Goodman, J e r r y R . , " In -F l igh t EVA f o r Mainline Apollo Missions, 'I Proceedings of Second National Conference on Space Maintenance and Extravehicular Activit ies , August 1968, L a s Vegas, Nevada.
Brown, S t u a r t C . , "Predicted Performance of On-Of f Systems f o r Precise A t t i t u d e C o n t r o l , " NASA TN D - 1 0 4 0 , J u l y 1 9 6 1 .
Brownell, C h a r l e s , and S c h o f i e l d , J . N . , "EVA Assoc ia ted wi th t he Assembly and Serv ices o f Large S t ruc tures ,I1 Proceed- ings of National Conference on Space Maintenance and Extra- v e h i c u l a r A c t i v i t i e s , March 1 9 6 6 , Orlando, Flor ida.
Chang, D r . K . T . , and Yarber, G . W . , "Applicat ion of Control Moment Gyroscope t o S t a b i l i z a t i o n and At t i tude Cont ro l i n Space," Proceedings of Nat ional Conference on Space Main- t enance and Ex t r aveh icu la r Ac t iv i t i e s , March 1 9 6 6 , Orlando, F l o r i d a .
Coff in , C . L . , "Space-Suit Thermal Conditioning Techniques for Future Ext ravehicu lar Miss ions , I' Proceedings of Second National Conference on Space M-aintenance and Extravehicular A c t i v i t i e s , August 1968, Las Vegas, Nevada.
Costick, John F. 111, "The Necess i ty fo r Development and U s e of Fas ten ing Devices wi th Spec ia l Charac te r i s t ics for Space U s e ," Proceedings of National Conference on Space Maintenance and E x t r a v e h i c u l a r A c t i v i t i e s , March 1 9 6 6 , Orlando, Flor ida.
1 0 . Crawford , Bi l ly , PI. and Kama, William N., "Remote Handling Research and Poten t ia l Space Appl ica t ions , 'I Proceedings of National Conference on Space Maintenance and Extravehicular A c t i v i t i e s , March 1 9 6 6 , Orlando, Flor ida.
11. Dahl, P . R . , Aldr ich , G . T. and Herman L. K . , " L i m i t Cycles i n R e a c t i o n J e t A t t i t u d e Cont ro l Sys tems Subjec t to Externa l Torques, I' Proceedings of Guidance, Control and Navigation Conference, August 1 9 6 1 , S t a n f o r d , C a l i f o r n i a .
47
1 2 . Dav i s , J e f f e r son C . , "Advanced Aspects of Pressure S u i t Developments, I' Lectures i n Aerospace Medicine, 6th Series, AD 665 1 0 7 , February 1 9 6 7 , Brooks AFB.
.. ..
13. Drissel, W. E . , Haines, R. L . , e t a l . , "Study of an A t t i t u d e Cont ro l Sys tem for the As t ronaut Maneuver ing Uni t , " NASA CR-198, March 1965 .
1 4 . DuBois, J . , "The Determinat ion of the Moment o f I n e r t i a o f t h e Living Human Orqanism," NA-62-135, 1 9 6 2 .
15. E l k i n s , W i l l i a m , "Hard Shel l Sui t Per formance as it Relates t o Space Maintenance and Other Extravehicular Act ivi t ies , Processdings of National Conference on Space Maintenance and E x t r a v e h i c l u a r A c t i v i t i e s , March 1 9 6 6 , Orlando, Flor ida.
16 . Emerson, Jerome E . , "S imula t ion S tudies o f EVA Missions ,I1
Proceedings of National Conference on Space Maintenance and E x t r a v e h i c u l a r A c t i v i t i e s . , March 1 9 6 6 , Or lando, F lor ida .
1 7 . Erg in , E . I . , Norum, V. D . , and Windeknecht, T . G . , "Techniques for Analys is o f Nonl inear At t i tude Cont ro l Sys tems for Space V e h i c l e s , " ASD-TDR-62-208, Vol. I - I V , June 1 9 6 7 .
18 . F ra se r , D r . T. M . , "Philosophy of S t i m u l a t i o n i n a Man- Machine Space Mission System," NASA SP-102, 1 9 6 6 .
1 9 . Freeman, H. E . , and DeSonne, G . , "Appl ica t ion of Cont ro l Gyros to Astronaut Maneuvering Units ," Proceedings of Second National Conference on Space Maintenance and Extra- v e h i c u l a r A c t i v i t i e s , August 1968, Las Vegas, Nevada.
2 0 . Gal iana , H. L . , " Ioniz ing Radia t ion and Magnet ic F ie lds : A Review of Thei r Ef fec ts on t h e Nervous System," MVLS-69-1, February 1 9 6 9 , Man-Vehicle Laboratory, Massachusetts Insti tute of Technology, Cambridge, Massachussetts .
2 1 . Gaylord, R. S . , and Keller, W . N . , "Att i tude Control System Using Logical ly Control led Pulses ," Proceedings of Guidance Control and Navigation Conference, Aug. 1 9 6 1 , S t a n f o r d , C a l i f .
2 2 . Graybie l , A . , "Or i en ta t ion i n Space wi th Respec t to the Ves t ibu la r Funct ion ," Environmental Effects on Conscien- c iousness , S c h a e f f e r , Karl E . ( e a . ) , McMillan, 1 9 6 2 .
23. Haeusserman, Walter, "Recent Advances i n A t t i t u d e C o n t r o l of Space Vehicles," ARS Journal , February 1 9 6 2 , pp. 188-195.
2 4 . Hanavan, Jr. Ernes t P . , "A Mathematical Model of t h e Human Body," AP4RL-TR-64-102, O c t . 1 9 6 4 , Wright-Pat terson AFB, Ohio.
25. Hatcher , Norman M . , and Young, Richard N . , "An Automatic Balancing System for U s e on F r i c t i o n l e s s l y S u p p o r t e d At t i tude-Cont ro l led Test P la t forms ," NASA TN D - 4 4 2 6 , 1968.
26. Herrala, Thomas W . , and Sut ton, James G . , "Advanced P o r t a b l e Life Support Concepts ," Proceedings of Second National Conference on Space Maintenance and Extravehicular Ac t iv i t i e s , August 1 9 6 8 , Las Vegas, Nevada.
27 . Herscher , M. B . , e t a l . , "Voice Cont ro l le r for As t ronaut Maneuvering Unit, 'I Proceedings of Second National Conference on Space Maintenance and Extravehicular Act ivi t ies , August 1 9 6 8, L a s Vegas , Nevada.
28. H e w e s , Donald E . , "Analysis of Self-Locomotive Performance of Lunar ExFlorers Based on Experimental Reduced-Gravity S t u d k s ,I1 NASA T N D-39 34, 1 9 6 7 .
2 9 . H e w e s , Donald E . , "Studeis of Pi lot ing Problems of One-Man Flying Units Operated in Simulated Lunar Gravi ty ," Proceed- ings of Second National Conference on Space Maintenance a n d E x t r a v e h i c u l a r A c t i v i t i e s , Aug. 1968, Las Vegas, Nevada.
30. H i l l , Pau l , R . , and Kenned-y, T. L . , " F l i q h t Tests of a Man Standing on a Platform Supported by a Tee te r ing Ro to r , " NASA RM L54B12a, 1 9 5 4 .
31. Howard, Douglas C . , "Engi:neering Design Study of a Space Sui t wi th an In tegra ted Envi ronmenta l Cont ro l Sys tem," AD 680-826, October 1968.
32. H u b e r , W . C . and Finn, R . W . , "A Summary of Hand-Held Man- euvering Unit Development," Proceedings of Second National Conference on Space Maintenance and Extravehicular Activit ies, August 1968, Las TTeqas , Nevada.
33. Inter ian, Alfred, and Kugath, Donald, "Remote Manipulators i n Space ," As t ronaut ics - .. ~ ~ . . ~ ~ - ." and. Aeronaut ics , May 1 9 6 9 , pp. 4 0 - 5 1 .
34. Iribe, P. and Lieske, "Study of Extravehicular Protect ion and Operations, NASA CR-773, J u l y , 1 9 6 6 .
35. J anos , Joseph J . , and Hoffman, Sherwood, "Forces and Moments Produced by A i r and H e l i u m Jets Exhausting Para l le l t o F l a t P la te i n a Near Vacuum," NASA TN D-4408, 1968 .
36. Johnston, Richard, S . , Cor rea l e , James V . , and Radnotsky, Matthew I . , "Space S u i t Development S t a t u s , " NASA TN D-3291, 1 9 6 6 .
37. Kane, Thomas R . , "Seif-Rotat ion of Astronauts by Yeans of Limb Moverhents," Proceedings of Second National Conference on Space Main tenance and Ext ravehicu lar Act iv i t ies , Aug. 1 9 6 8 , L a s Vegas , Nevada.
49
38.
39.
40 .
4 1 .
42 .
43.
4 4 .
45.
4 6 .
47 .
4 8 .
Keller, T . , and O'Hagan, J. T . , "Vehicular Control Using t h e Human Balancing Reflex," GRD-102, 1963.
Keller, T . , and O'Hagan, J. T . , e t a l . , "An Out l ine o f Proposed Research Into the Use of t h e Human Balancing Ref lex for Cont ro l o f Vehic les , " RP-162, 1963.
Keller, Thomas L . , and Breul, Harry T . , "Hands-Free Pre- c i s i o n C o n t r o l f o r EVA," Proceedings of Second National Conference on Space Maintenance and Extravehicular A c t i v i t i e s ,I1 Aug. 1 9 6 8 , Las Vegas , Nevada.
Kephart , J. F . , and Walker, S . C . , "A Comparison of Propulsion Concepts for Astronaut Maneuvering U n i t s ,I1 Proceedings of National Conference on Space Maintenance and Extravehicular A c t i v i t i e s , March 1 9 6 6 , Or lando, F lor ida .
Lieske, J. A . , and I r i b e , P . , "Extravehicular Environment and Mobil i ty Constraints on the Conf igura t ion of an Anthropomorphic Space Suit System, I' Proceedings of National Conference on Space Maintenance and Extravehicular A c t i v i t i e s , March 1 9 6 6 , Orlando, Flor ida.
Lindemuth, Robert W . , "Performance Analysis of an Astronaut Maneuvering System, Proceedings of National Conference on Space Maintenance and Extravehicular Act ivi t ies , March 1 9 6 6 , Orlando, Flor ida.
Loats, Harry L . , J r . , e t a l . , "Cor re l a t ion S tudy o f t he Simulat ion of Gemini E x t r a v e h i c u l a r A c t i v i t y w i t h F l i g h t R e s u l t s , 'I NASA C R - 1 1 4 6 , February 1 9 6 9 .
May, C . B . , and Holmes, A . E. , "An Evalua t ion of Man's Capab i l i t y t o Pe r fo rm Suppor t Func t ions i n Space , " Proceedings of 1 7 t h I n t e r n a t i o n a l A s t r o n a u t i c a l C o n g r e s s , 1 9 6 6 , Madrid, Spain.
May, Ches te r B. , and McCarty , Harlan , "EVA Requirements i n S u p p o r t of Sc ien t i f ic and Technica l Ear th-Orbi ta l Space Act ivi t ies , Second Nat ional Conference on Space Maintenance and Ext ravehicu lar A c t i v i t i e s , Aug. 1968, Las Vegas, Nevada.
McIver, Robert G . , "Bends i n S imula ted Ext ravehicu lar A c t i v i t y , " Lectilres i n Aerospace Medicine, Sixth Series, AD 665-107, Feb. 1 9 6 7 , Brooks AFB.
- "
McMann, Harold J. J r . , Moran, Jon W . and Wh:;.tsett, Major C . E . Jr. , "Maneuvering-Unit Development Programs, 'I J o i n t National Meeting: American Astronautical Society and Operat ions Research Society, June 1 7 - 2 0 , 1 9 6 9 , Denver, Colorado, Paper No. X I 1 1 E . 2 .
50
49.
50.
51.
52.
53.
5 4 .
55.
56.
57.
58 .
59.
6 0 .
61 .
Miller, Per ry B . , "Medical Problems of Weightlessness SAM TR 66-200, 1965.
Monroe, G. M . , and McMillan, W. C . , "Descr ip t ion of t h e Astronaut Maneuvering Unit ," Proceedings of 17th Inter- nat ional Astronaut ical Congress , 1966, Madrid, Spain.
Mueller, George E. , "Beyond Apollo," Astronaut ics and Aeronautics, August 1965.
National Aeronautics and Space Administration, "Compendium of Human Responses to the Aerospace Environment ," NASA Cont rac tor Repor t CR-1205, November 1968, Albuquerque,, New Mexico.
Nat ional Aeronaut ics and Space Administration, "Gemini Summary Conference," NASA SP-138, February 1 9 6 7 .
National Aeronautics and Space Adminis t ra t ion , "Summary of Gemini Ex t raveh icu la r Ac t iv i ty ,I1 NASA SP-149, 1 9 6 7 .
O'Connor, B. J . , and Morine, L . A . , "A Desc r ip t ion o f t he CMG and i t s Appl ica t ion to Space Vehic le Cont ro l , " Proceedings of A I A A Guidance, Control and Flight Dynamics Conference , 1 9 6 7.
Parker, Frank W . , and Garnet t , Robert J . , "The Astronaut Maneuvering U n i t , " Proceedings of National Conference on Space Main tenance and Ext ravehicu lar Act iv i t ies , March 1 9 6 6 , Orlando, Flor ida.
P h i l l i p s , James P . , "Control Moment Gyro C h a r a c t e r i s t i c s and Thei r Ef fec ts on Control System Performance," A I M Paper NO. 68-875, 1968.
P r i n c e , R. Norman, and O 'Re i l ly , W i l l i a m J . , "Development of the Portable Environmental Control System, ' ' Proceedings of Second National Conference on Space Maintenance and E x t r a v e h i c u l a r A c t i v i t i e s , Aug. 1 9 6 8 , Las Vegas, Nevada.
Prodan, John, and Gaskins, Darius W., Jr . , "Ext ravehicu lar A c t i v i t y T r a i n i n g i n t h e T-27 Space F l igh t S imula tor , 'I
Proceedings of National Conference on Space Maintenance a n d E x t r a v e h i c u l a r A c t i v i t i e s , March 1 9 6 6 , Or lando, F lor ida .
P u r i , D r . N . N . , e t a l . , "Unmanned Rendezvous, Station- Keeping and Docking f o r E x t r a v e h i c u l a r S p a c e A c t i v i t i e s , " Proceedings Of Second National Conference on Space Maintenance and Ext ravehicu . la r Act iv i t ies , Aug. 1968, L a s Vegas, Nevada.
Reid, R. C . , and Richardson, D. L . , "Por tab le L i fe Suppor t Sys tems f o r E x t r a v e h i c u l a r Act iv i t ies , Proceedings of 61s t Annual Meeting on Life Support Systems, American Insti tute of Chemical Engineers, Dec. 1 9 6 8 , Los Angeles , Cal i forn ia .
6 2 .
63.
6 4 .
65.
6 6 .
6 7 .
68 .
6 9 .
7 0 .
71.
72 .
73.
7 4 .
Riddle , C. and Kane, T. R . , "Reor i en ta t ion o f t he Human Body by Means of A r m Motions," NASA CR 95362, Feb. 1968 .
Runyan, T. L . , and Dick, J. M . , " I l l u m i n a t i o n f o r Extra- vehicular Tasks, Proceedings of Nat ional Conference on Space Main tenance and Ext ravehicu lar Act iv i t ies , March 1 9 6 6 , . Or lando, F lor ida .
Samson, J. H . , EVA Suppor t o f Sc ien t i f ic and Technica l Experiments, Proceedings of Second National Conference on Space Maintenance and Extravehicular Act ivi t ies , Aug. 1196 8 , Las Vegas , Nevada.
Schuerch, H. , "Some Considerat ions of Manned Ex t raveh icu la r A c t i v i t i e s i n Assembly and Operation of Large Space S t r u c t u r e s , I1 NASA CR-871, 1 9 6 7 .
Schwinghammer, Robert J . , "Tool Experiments for Assembly, Maintenance and Repair i n Space , I 1 Proceedings of Nat ional Conference on Space Main tenance and Ext ravehicu lar Act iv i t ies , March 1 9 6 6 , Or lando, F lor ida .
S e a l e , D r . Leonard PI. , "Space Extravehicular Operat ions : A Review of the Requirements and Alternate System Approaches, 'I
Proceedings o f 17 th In te rna t iona l As t ronaut ica l Congress , 1 9 6 6 , Madrid, Spain.
S e a l e , D r . Leonard M . , "Manned Propulsion Devices and T h e i r Appl ica t ions on Ea r th and i n Space , " Lec tu res i n Aerospace Medicine, Sixth Series, AD 665-107, Feb. 1 9 6 7 , Brooks AE'B.
See ly , R . B . , "Automatical ly Stabi l ized Maneuvering Unit UASMU) ,I1 Proceedings of Second National Conference on Space Maintenance and Extravehicular Act ivi t ies , Aug. 1968, Las Vegas , Nevada.
S e w e l l , H . E . , "Pre l iminary AMU Simulation Proqram, I' LTV Ast ronaut ics Div is ion Repor t No. 00.775, Nov. 1 9 6 4 .
Spady, Amos A . , J r . , and Harris, Randal l L . , "Ef fec ts o f Pressure Su i t s and Backpack Loads on Man's Self-Locomotion &n Earth and Simulated Lunar Gravity," NASA TN D - 4 4 6 4 , 1968.
"Study of The Thermal Processes for CR-2 1 6 .
"A System Study of a Manned O r b i t a l October, 1965, Aerospace Group, The Sea t t le , Washington .
Taylor, Lawrence W . Jr. , and Smith,
Man-in-Space, " NASA
Telescope," D.2-84042-1, Boeing Company;
John W . , "An A n a l y t i c a l Aphroach t o t h e Design of an Automatic Discontinuous Control System," NASA TN-D-630, A p r i l 1 9 6 1 .
52
75.
76.
77.
78.
79.
80.
81.
82.
83.
8 4 .
85.
Thomas, David F., Jr., et al., "Jet Shoes - An Extravehicular Space Locomotion Device," NASA TN D-3809, 1967.
Trout, Otto F., Jr., and Hill, Paul R., "Human Work Per- formance in Space," Proceedings of Second National Conference on Space Maintenance and Extravehicular Activities, Aug. 1968, Las Vegas, Nevada.
Tucker, Elton M., "NASA.Programs for Advanced Space Suit Development," Proceedings of Second National Conference on Space Maintenance and Extravehicular Activities, Aug. 1968, Las Vegas, Nevada.
Van Dyke, W. J., "Performance?Design and Product Configura- tion Requirements, Extravehicular Mobility Unit for Apollo Block I1 Missions," Master End Item Specification, NASA- EMU-CSD-A-096, Manned Spacecraft Center, Houston, Texas, January 1966.
Van Schaik, Peter N., "Man's Changing Role in EVA Space," Proceedings of Second National Conference on Space Maintenance and Extravehicular Activities, Aug. 1968, Las Vegas, Nevada.
Whitsett, Charles Edward, Jr., "Some Dynamic Response Characteristics of Weightless Man," AMRL - TDR - 63-18, 1963.
Whitsett, Charles E., Jr., "Experiment "509 Astronaut Maneuvering Equipment," Proceedings of Second National Conference on Space Maintenance and Extravehicular Activities, Aug. 1968, Las Vegas, Nevada.
Willoughby, A. J. et al., "A Summary of Research as of January 1966 in Extravehicular Maneuvering Techniques for Space, "Proceedings of National Conference on Space Maintenance and Extravehicular Activities, March 1966, Orlando, Florida.
Wortz, Dr. E. C., et al., "Study of Astronaut Capabilities to Perform Extravehicular Maintenance and Assembly Functions in Weightless Conditions," NASA CR-859, Sept. 1967.
Wortz, Dr. E. C., "The Mechanics of Work in Reduced-Gravity Environment," Proceedings of Second National Conference on Space Maintenance and Extravehicular Activities, Aug. 1968, Las Vegas, Nevada.
Wrench, E. H . , and Greensite, A. L., "EVA Stabilization Shoes, 'I GDC-ERR-AN-1107, 1967.
53
1 1 1 I I
86. Wudell, A. E., and Tobey, W. H., "A Six-Degree-of-Freedom Sirnulation for Evaluation of Space Mobility Aids and Tasks," Proceedings of Second National Conference on Space Main- tenance and Extravehicular Activities, Aug. 1968, Las Vegas, Nevada.
87. Wudell, A. E., and Tobey, W. H., and Whitsett, Major C. E., "EVA Maneuvering Unit Comparison," Joint National Meeting: American Astronautical Society and Operations Research Society, June 17-20, 1969, Denver Colorado, Paper No. XV J. 2.
88. Yost, Vaughn H., "Mechanical Devices for Zero Gravity Simu- lation," Proceedings of Second National Conference on Space Maintenance and Extravehicular Activities, Aug. 1968, Las Vegas, Nevada.
89. Young, Gerould A., Major, USAF, and Torvik, Peter J., "Simulation of Unstabilized Maneuvering Units," Proceedings of Second National Conference on Space Maintenance and Extra- vehicular Activities, Aug. 1968, Las Vegas, Nevada.
90. Young, L. R., "A, Control Model of the Vestibular System," Proceedings of Symposium on Technical and Biological Problems in Cybernetics, September 1968, Yerivan, Armenia, USSR.
91. Zimmerman, C. H., Hill, P. R., and Kennedy, T. L., "Preliminary Investigation of the Flight of a Person Supported by a Jet Thrust Device Attached to his Feet," NACA Research Memorandum L52D10, January 1953.
54
I "
F i g u r e 1: Work Platform ( 3 4 )
55
Figure 2 : Rendezvous. Geometry (13)
V
Figure 3 : Vector Diagram (13)
(a) Translation only no rotationa I con t yo I
Negative control moment
(b) Rotationa I contro i
F i g u r e 5: P la t form for Balanc ing Reflex Expts . (38)
58
I
X
Figure 6: Single Rotor Single Degree of Freedom CMG
I .
c
Body At t i tud -e
I ' I f - I Momer '
Exch,
I I I I
"
I n t e g r a t o r N u l l e d When Command Siqnal Given
F igure 7 : Typica l Cont ro l Moment Gyro Type A t t i t u d e C o n t r o l a n d S t a b i l i z a t i o n Sys t em Ut i l i z ing Rate Gyro Feedback ( 6 4 )
TORQUE SHAFT
Figure 8 : Momentum Control System. ( 85
r
1 . :
a c t u a l angul .ar v e l o c i t y of a s t r o n a u t .
5 1 0 15 20
Time ( sec )
angular v e l o c i t y as p e r - ccfved b y a s t r o n a u t
-.-.””- -. I _” ”.-
appa ren t r e v e r s a l of d i r e c t i o n
E.:.., ATTITUDE
%%
JET CONTRO
F igu re 11: Pseudo Rate Control Block Diagram (13)
64
I Rate feedback
L A t t i t u d e f eedbocl: -
Figure 1 2 - Block diagram of an automatic discont inuous a t t i tude-control system with l inear ra te and posi t ion feedback. (74)