Este paso produce una gran cantidad de pequeñas partículas de plástico es por esto que serecomienda la utilización de gafas de seguridad para mantenerlos protegidos.
Gire la cáscara al revés para que pueda quitar el soporte de plástico protector. Si no tienesningunas letras azules en el interior de su carcasa, entonces ya ha eliminado la capa protectorade plástico.
Comienza a pelar la carcasa usando un cuchillo. Las esquinas dobladas son un buen lugar paraempezar.
Utilice las manos para pelar el resto de la superficie.
Puede limpiar las áreas fundidas de plástico rascando suavemente con el cuchillo - elpolipropileno no se raya fácilmente si eres suave.
Si quedan restos de plástico en los agujeros de la carcasa, por el proceso de fabricación laser,meter cuidadosamente con un cuchillo o destornillador para retirar los restos
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
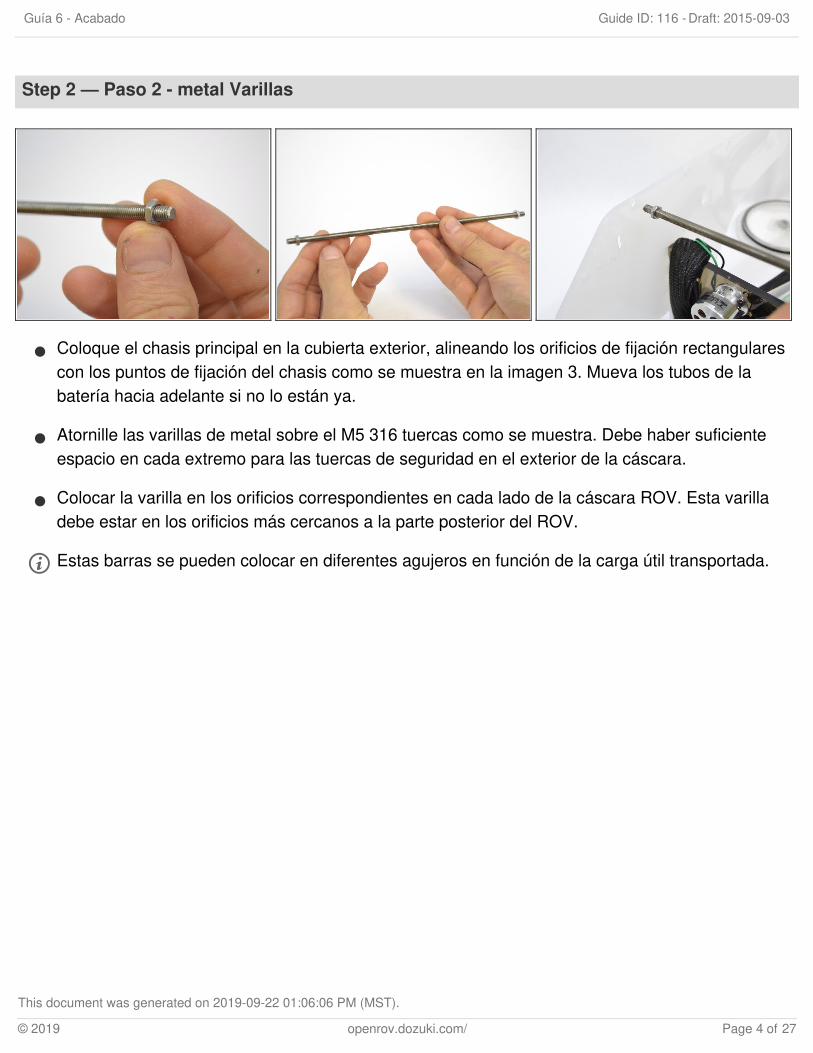
Coloque el chasis principal en la cubierta exterior, alineando los orificios de fijación rectangularescon los puntos de fijación del chasis como se muestra en la imagen 3. Mueva los tubos de labatería hacia adelante si no lo están ya.
Atornille las varillas de metal sobre el M5 316 tuercas como se muestra. Debe haber suficienteespacio en cada extremo para las tuercas de seguridad en el exterior de la cáscara.
Colocar la varilla en los orificios correspondientes en cada lado de la cáscara ROV. Esta varilladebe estar en los orificios más cercanos a la parte posterior del ROV.
Estas barras se pueden colocar en diferentes agujeros en función de la carga útil transportada.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
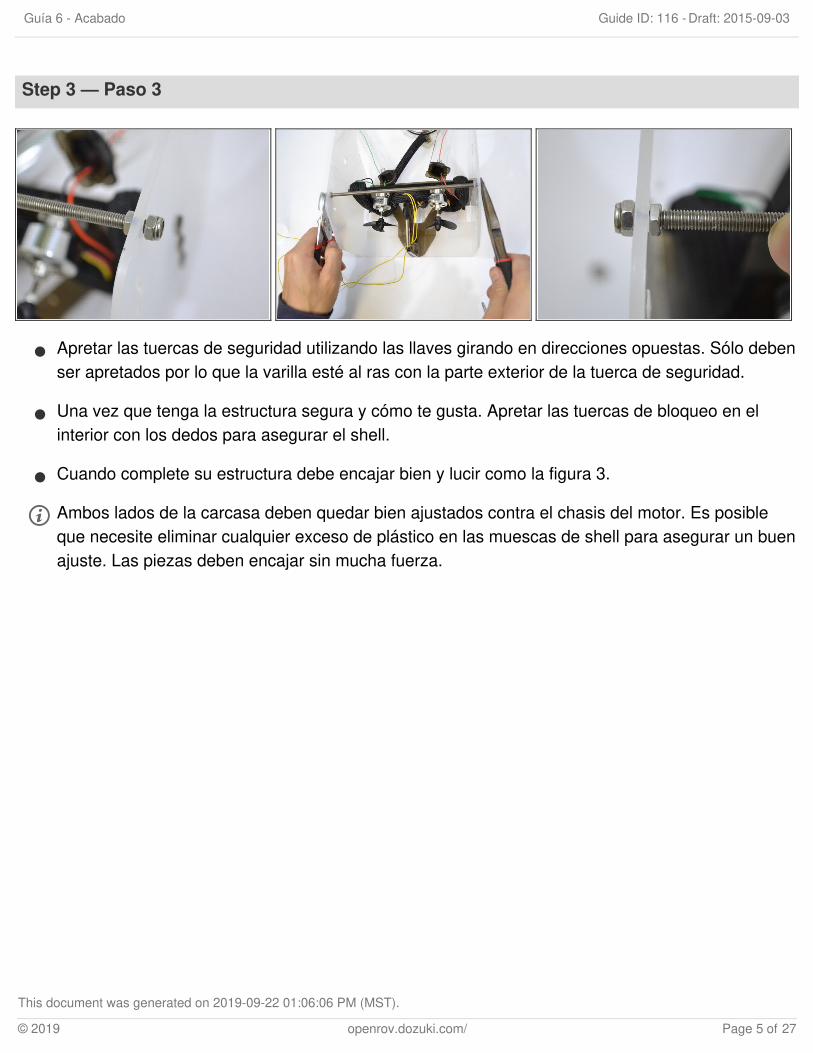
Apretar las tuercas de seguridad utilizando las llaves girando en direcciones opuestas. Sólo debenser apretados por lo que la varilla esté al ras con la parte exterior de la tuerca de seguridad.
Una vez que tenga la estructura segura y cómo te gusta. Apretar las tuercas de bloqueo en elinterior con los dedos para asegurar el shell.
Cuando complete su estructura debe encajar bien y lucir como la figura 3.
Ambos lados de la carcasa deben quedar bien ajustados contra el chasis del motor. Es posibleque necesite eliminar cualquier exceso de plástico en las muescas de shell para asegurar un buenajuste. Las piezas deben encajar sin mucha fuerza.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
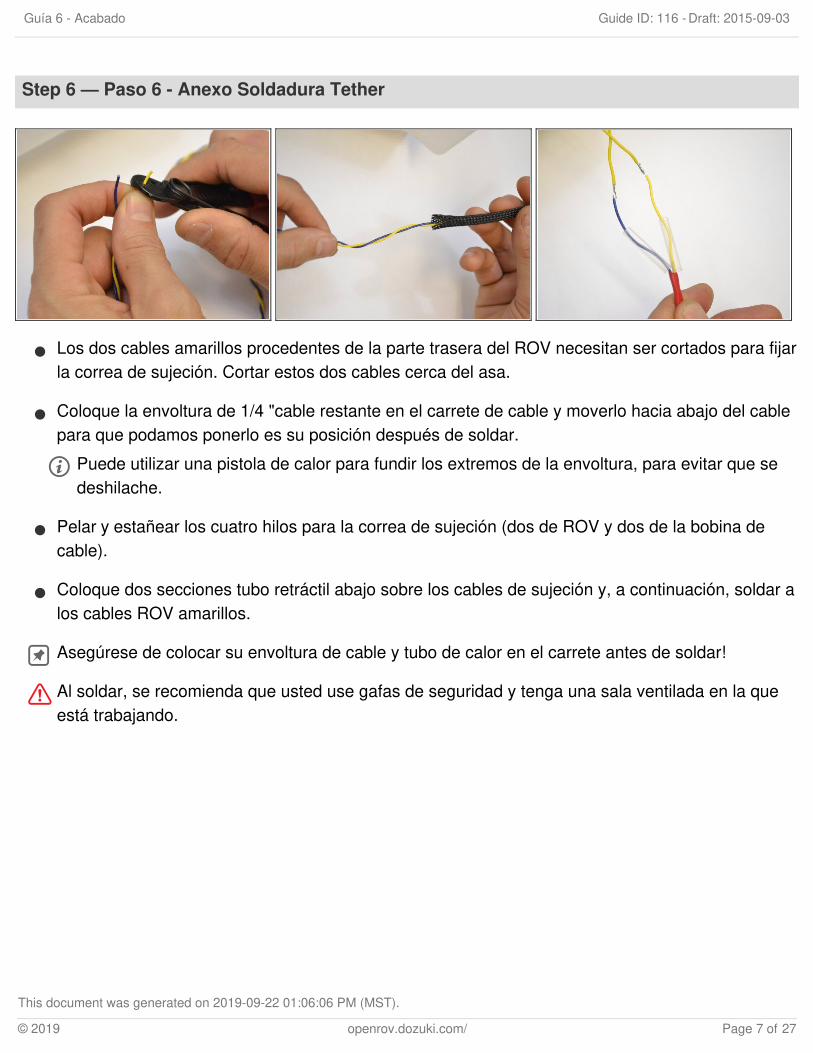
Los dos cables amarillos procedentes de la parte trasera del ROV necesitan ser cortados para fijarla correa de sujeción. Cortar estos dos cables cerca del asa.
Coloque la envoltura de 1/4 "cable restante en el carrete de cable y moverlo hacia abajo del cablepara que podamos ponerlo es su posición después de soldar.
Puede utilizar una pistola de calor para fundir los extremos de la envoltura, para evitar que sedeshilache.
Pelar y estañear los cuatro hilos para la correa de sujeción (dos de ROV y dos de la bobina decable).
Coloque dos secciones tubo retráctil abajo sobre los cables de sujeción y, a continuación, soldar alos cables ROV amarillos.
Asegúrese de colocar su envoltura de cable y tubo de calor en el carrete antes de soldar!
Al soldar, se recomienda que usted use gafas de seguridad y tenga una sala ventilada en la queestá trabajando.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
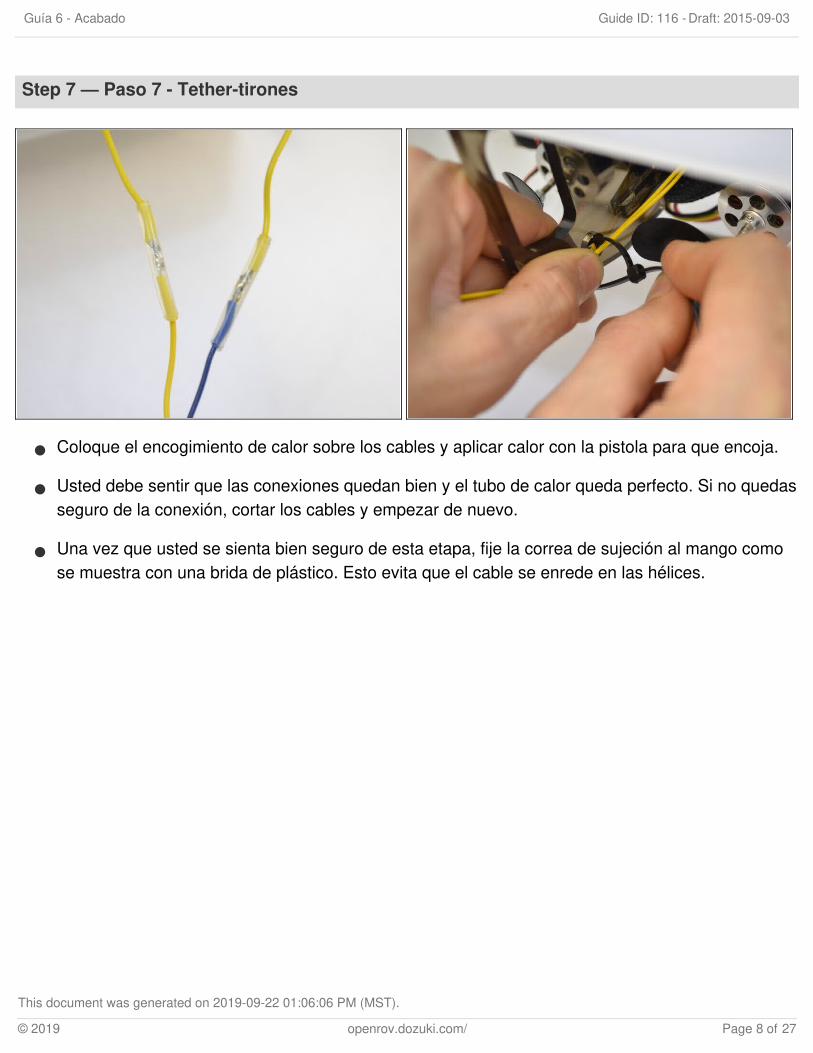
Coloque el encogimiento de calor sobre los cables y aplicar calor con la pistola para que encoja.
Usted debe sentir que las conexiones quedan bien y el tubo de calor queda perfecto. Si no quedasseguro de la conexión, cortar los cables y empezar de nuevo.
Una vez que usted se sienta bien seguro de esta etapa, fije la correa de sujeción al mango comose muestra con una brida de plástico. Esto evita que el cable se enrede en las hélices.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
Con la brida grande de plástico enel orificio del extremo del mangocomo se muestra. Asegure la bridade plástico. Esto proporcionará elalivio de tensión real entre la cuerday el ROV.
Como se mencionó en el últimopaso, dependiendo de donde secortara el cable, atar esta conexiónal mango, y envolver el cable con labrida grande de plástico.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
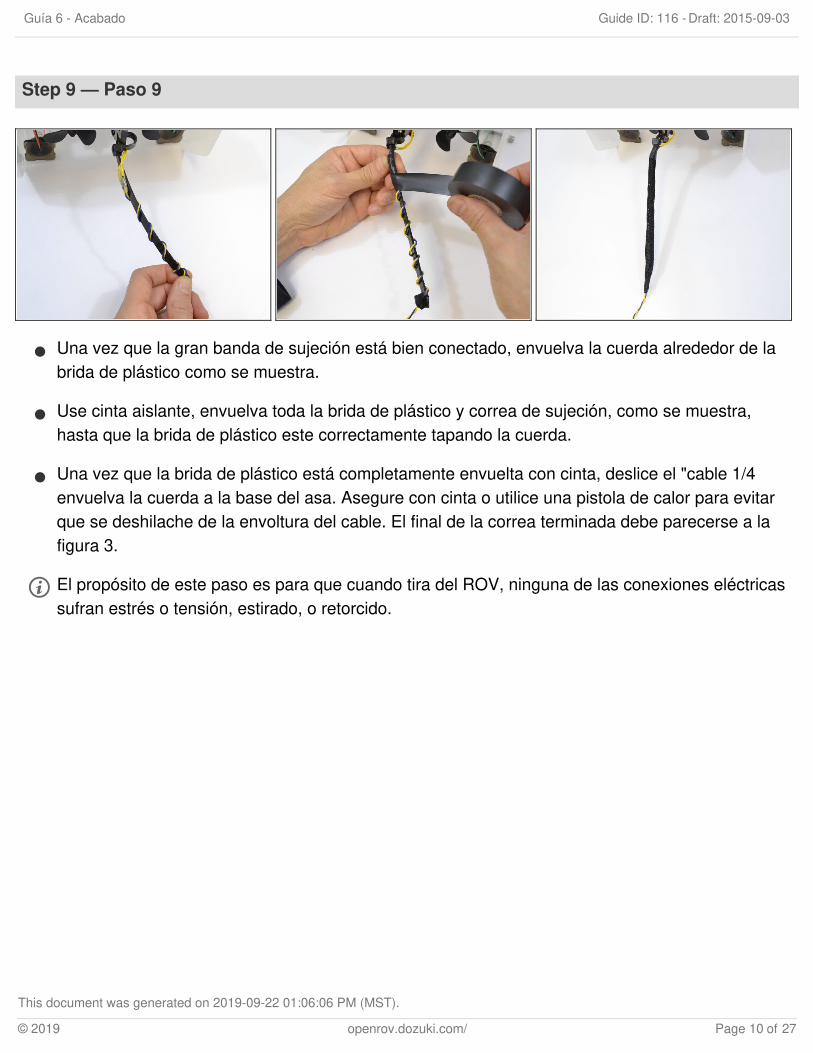
Una vez que la gran banda de sujeción está bien conectado, envuelva la cuerda alrededor de labrida de plástico como se muestra.
Use cinta aislante, envuelva toda la brida de plástico y correa de sujeción, como se muestra,hasta que la brida de plástico este correctamente tapando la cuerda.
Una vez que la brida de plástico está completamente envuelta con cinta, deslice el "cable 1/4envuelva la cuerda a la base del asa. Asegure con cinta o utilice una pistola de calor para evitarque se deshilache de la envoltura del cable. El final de la correa terminada debe parecerse a lafigura 3.
El propósito de este paso es para que cuando tira del ROV, ninguna de las conexiones eléctricassufran estrés o tensión, estirado, o retorcido.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
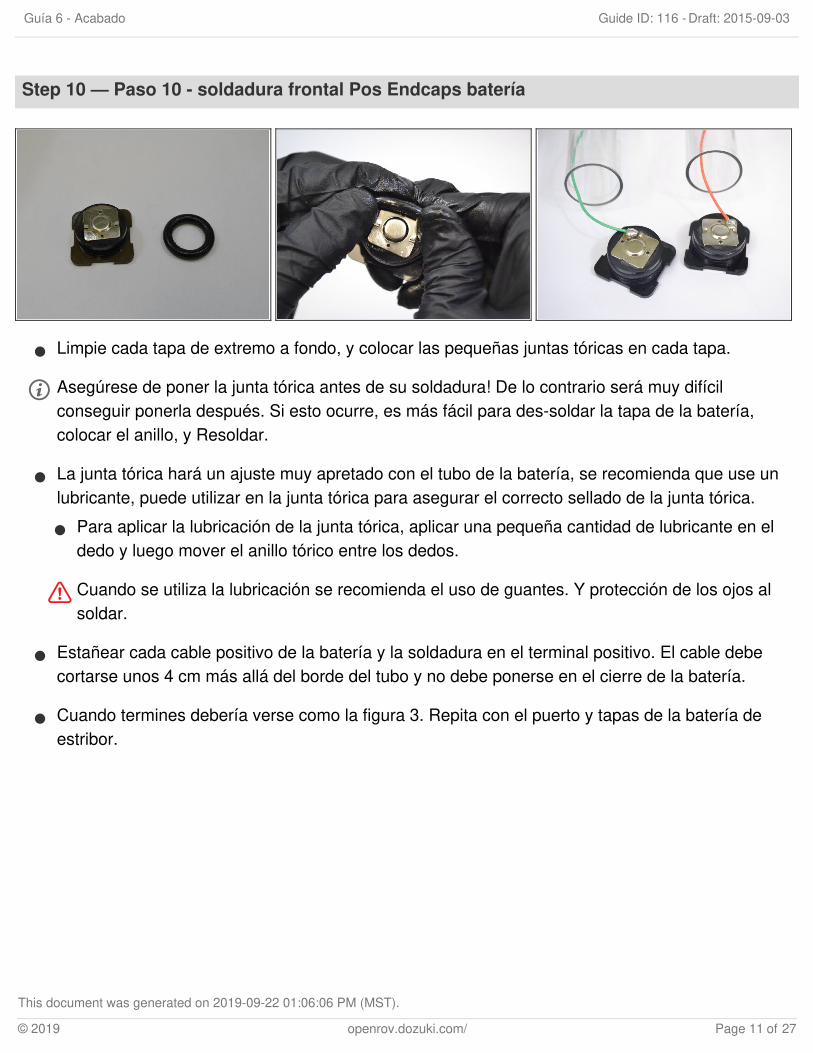
Limpie cada tapa de extremo a fondo, y colocar las pequeñas juntas tóricas en cada tapa.
Asegúrese de poner la junta tórica antes de su soldadura! De lo contrario será muy difícilconseguir ponerla después. Si esto ocurre, es más fácil para des-soldar la tapa de la batería,colocar el anillo, y Resoldar.
La junta tórica hará un ajuste muy apretado con el tubo de la batería, se recomienda que use unlubricante, puede utilizar en la junta tórica para asegurar el correcto sellado de la junta tórica.
Para aplicar la lubricación de la junta tórica, aplicar una pequeña cantidad de lubricante en eldedo y luego mover el anillo tórico entre los dedos.
Cuando se utiliza la lubricación se recomienda el uso de guantes. Y protección de los ojos alsoldar.
Estañear cada cable positivo de la batería y la soldadura en el terminal positivo. El cable debecortarse unos 4 cm más allá del borde del tubo y no debe ponerse en el cierre de la batería.
Cuando termines debería verse como la figura 3. Repita con el puerto y tapas de la batería deestribor.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
Esta aleta proporciona estabilidad de empuje durante las inmersiones.
Retire el soporte de plástico de la aleta polypro.
Coloque la aleta de la parte posterior del ROV en las dos muescas en la cáscara polypro. Puedeque tenga que quitar plástico de los agujeros en la capa para asegurar un ajuste apropiado.
Asegure la aleta con los tornillos de plástico 8MM y tuercas como se muestra. Se puedennecesitar pinzas para sostener la tuerca en su lugar. Una vez colocado el dedo pulgar puedemantenerla firme mientras se atornilla desde el otro lado.
Un buen ajuste puede es necesario en cada lado para garantizar la seguridad de toda laestructura.
Step 12 — Paso 12 - Etiqueta
Coloque la etiqueta sobre el ROV justo por encima del número de serie ... o en cualquier otrolugar que se vea bien para usted.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
Inserte la parte no hebilla de la correa por los orificios previstos en la carcasa como se muestra.Las correas están diseñados para mantener los paquetes de baterías en el ROV, así comoasegurar las tapas de la batería.
Asegúrese de que las correas pasan por debajo de los cables de la batería traseras. Las correasno deben doblar o poner tensión excesiva en el cableado.
Pase la correa a través del orificio posterior en la carcasa y tirar alrededor, entonces podemosadjuntar el sujetador, hebilla, y el bloqueo de correa.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
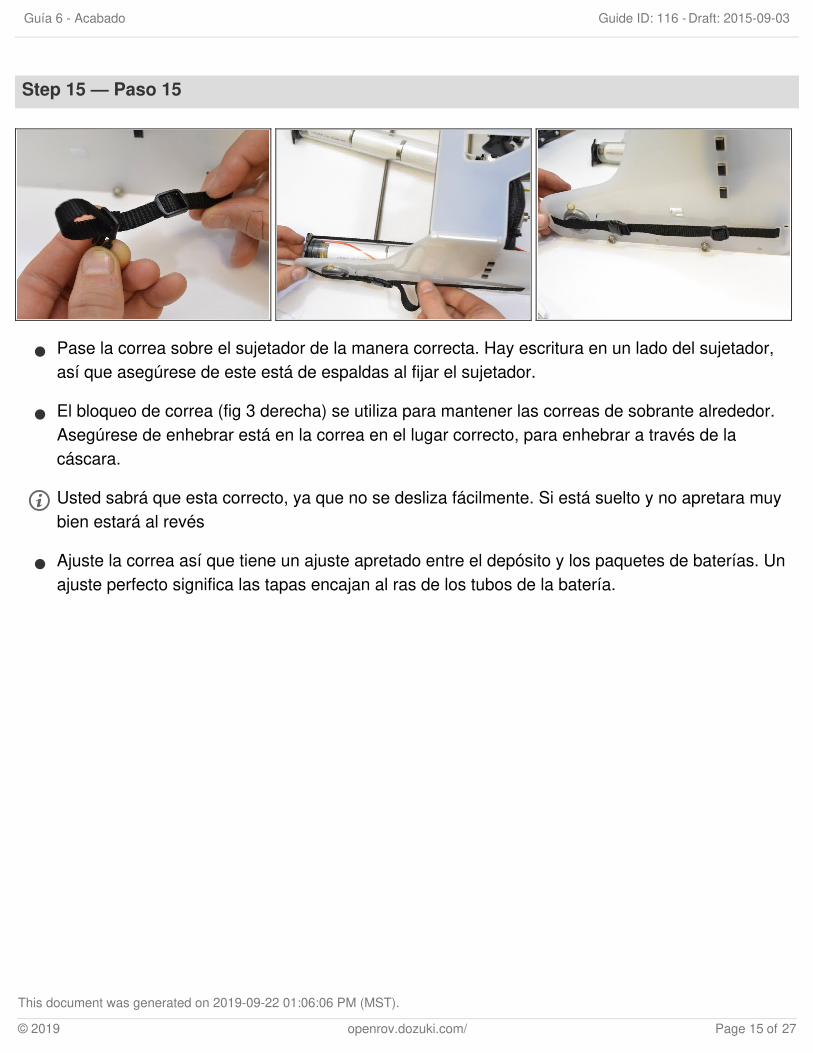
Pase la correa sobre el sujetador de la manera correcta. Hay escritura en un lado del sujetador,así que asegúrese de este está de espaldas al fijar el sujetador.
El bloqueo de correa (fig 3 derecha) se utiliza para mantener las correas de sobrante alrededor.Asegúrese de enhebrar está en la correa en el lugar correcto, para enhebrar a través de lacáscara.
Usted sabrá que esta correcto, ya que no se desliza fácilmente. Si está suelto y no apretara muybien estará al revés
Ajuste la correa así que tiene un ajuste apretado entre el depósito y los paquetes de baterías. Unajuste perfecto significa las tapas encajan al ras de los tubos de la batería.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
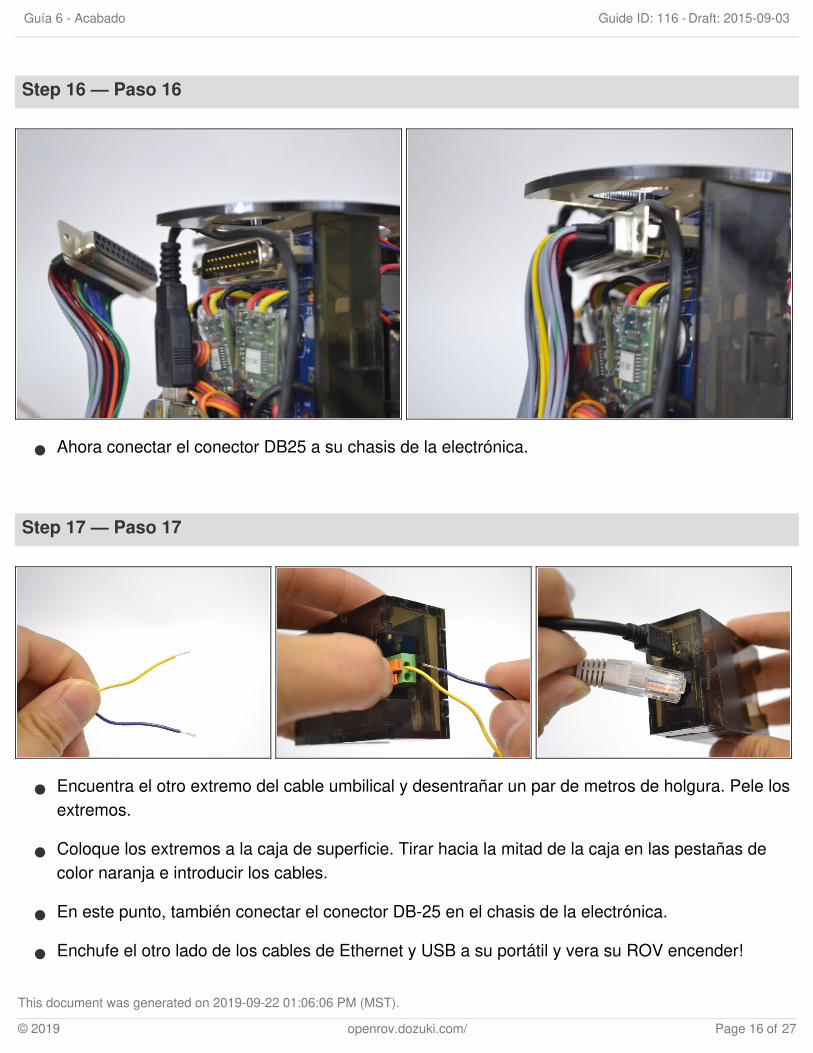
Aquí es donde las cosas empiezan a ponerse emocionantes! Vamos a conectar con el ROV, porprimera vez. Usted necesita estar seguro de que no se le olvido de conectar el conector DB25 enla tarjeta del controlador.
Para la versión 2.7 ROV, el software de a bordo ya está instalado en el equipo BEAGLEBONE. Enversiones anteriores, se habría necesitado para escribir la imagen de software más reciente enuna tarjeta SD que entraría al BEAGLEBONE, pero en este caso, el ROV debe tener todo lo queya necesita instalar en su memoria integrada "eMMC".
El ROV se ha construido en un dirección IP estática de 192.168.254.1, así que para conectar conella, la dirección IP de Ethernet de su ordenador debe estar en la misma subred, es decir,"192.168.254.2". La máscara de subred debe establecerse en 255.255.255.0.
Windows Vista: panel de control > redes y recursos compartidos > clic en "Administrarconexiones de red" en la barra de la izquierda. Clic en "red de área local" -> l-clic en Propiedades-> l-haga clic en "Protocolo de Internet versión 4" -> haga clic en "Propiedades" y seleccione laopción "Usar la siguiente dirección IP" poner 192.168.254.2
Windows 7: Panel de control> Redes e Internet> Centro de redes y uso compartido> clic en"Cambiar configuración del adaptador" en la barra de la izquierda. Entonces clic en "Conexión deárea local"> propiedades> clic en "Protocolo de Internet versión 4" haga clic en Propiedades.Seleccione "Usar la siguiente dirección IP" ponga 192.168.254.2
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
Windows 8: panel de control> Redes e Internet> Centro de redes y uso compartido> clic en"Cambiar configuración del adaptador" en la barra de la izquierda. Entonces clic en "Ethernet">propiedades> l-haga clic en "Protocolo de Internet versión 4" clic en Propiedades. Seleccione laopción "Usar la siguiente dirección IP" ponga192.168.254.2
OS X (Mac) : Abra Preferencias del sistema, clic en Red. Seleccione "Editar ubicaciones" de laubicación desplegable. Haga clic en el (+) y crear una nueva ubicación llamada"OpenROV".Seleccione su adaptador de Ethernet de la izquierda y seleccione Manualmente en el"Configurar IPv4" menú desplegable.
Configure la dirección IP de 192.168.254.2 y máscara de subred 255.255.255.0 a. PulseAplicar.
Step 19 — Paso 19 - Cockpit
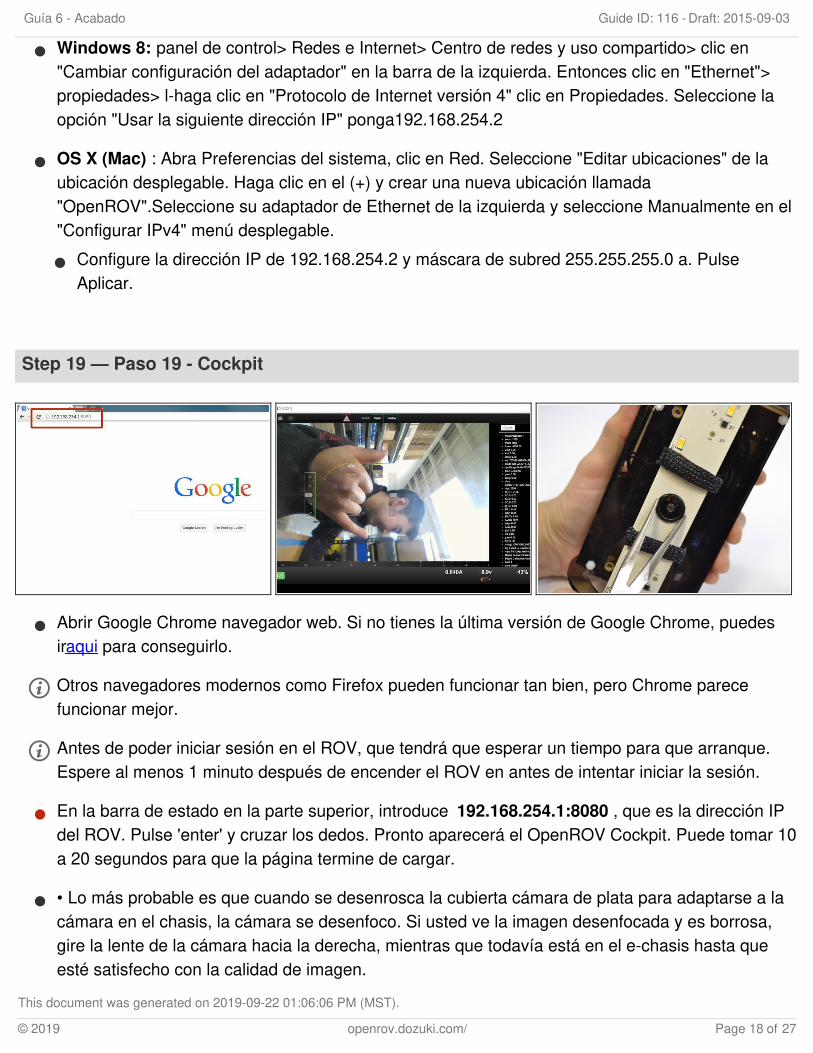
Abrir Google Chrome navegador web. Si no tienes la última versión de Google Chrome, puedesiraqui para conseguirlo.
Otros navegadores modernos como Firefox pueden funcionar tan bien, pero Chrome parecefuncionar mejor.
Antes de poder iniciar sesión en el ROV, que tendrá que esperar un tiempo para que arranque.Espere al menos 1 minuto después de encender el ROV en antes de intentar iniciar la sesión.
En la barra de estado en la parte superior, introduce 192.168.254.1:8080 , que es la dirección IPdel ROV. Pulse 'enter' y cruzar los dedos. Pronto aparecerá el OpenROV Cockpit. Puede tomar 10a 20 segundos para que la página termine de cargar.
• Lo más probable es que cuando se desenrosca la cubierta cámara de plata para adaptarse a lacámara en el chasis, la cámara se desenfoco. Si usted ve la imagen desenfocada y es borrosa,gire la lente de la cámara hacia la derecha, mientras que todavía está en el e-chasis hasta queesté satisfecho con la calidad de imagen.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
Antes de la calibración si sus láseres verse como la Figura 1, se requerirán de enfoque.
Encienda el láser pulsando la tecla "L" en su teclado.
Torcer la parte delantera del láser como se muestra en la figura 3 para enfocar el haz.
Con un poco de ensayo y error que debe ser capaz de ajustar el enfoque de láser para obtener elresultado que se muestra en la figura 3.
Los láseres pueden ser peligrosos si se refleje directamente en sus ojos. Aprenda más de lo quesiempre quiso saber acerca de la seguridad del láser aquí .
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
Crear una "Estación de calibración láser" (Pedazo de papel con dos X a 10cm de separación, enuna línea recta).
Coloque el ensamblaje de chasis electrónico en la parte superior de la tapa del extremo deestribor (el que no haya cables). Esto le dará la dirección de chasis una mancha plana y niveladapara la calibración.
Tape o asegurar el e-chasis a la tapa de extremo y mesa para que no se mueva alrededordurante la calibración. Ver figura 3.
Con el ROV funcionando presionar "L" para conectar el láser. También puede hacer clic en elicono "triángulo láser".
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
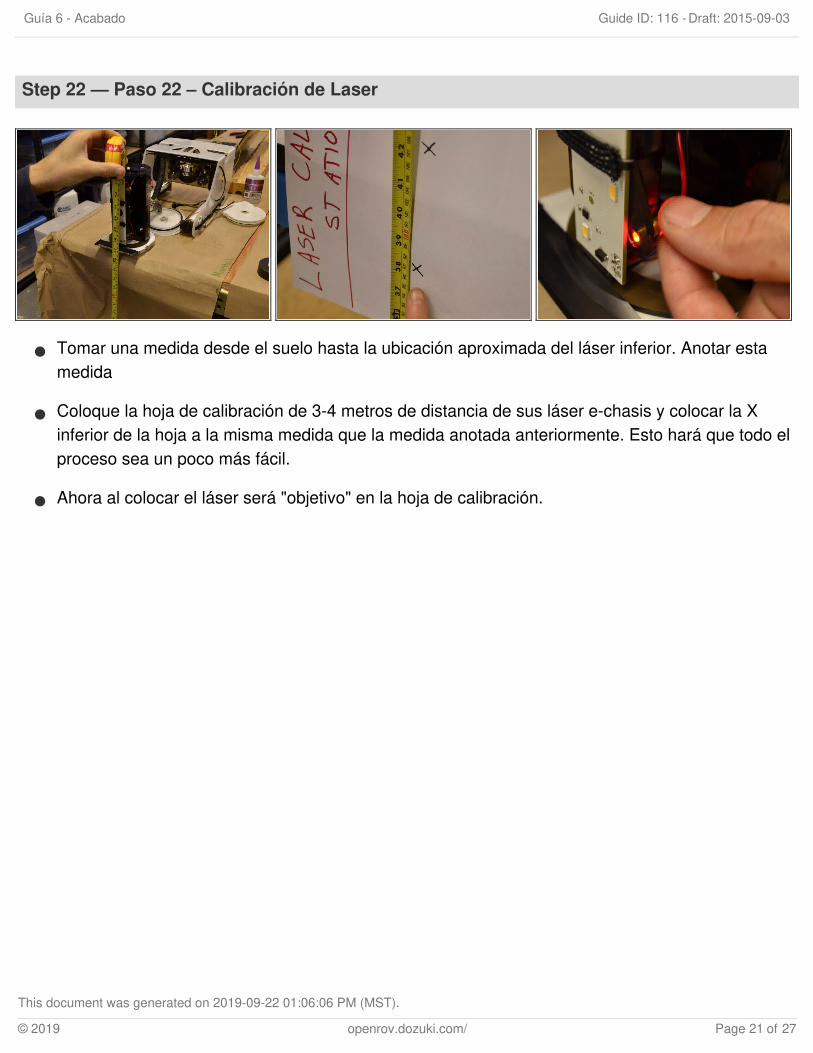
Tomar una medida desde el suelo hasta la ubicación aproximada del láser inferior. Anotar estamedida
Coloque la hoja de calibración de 3-4 metros de distancia de sus láser e-chasis y colocar la Xinferior de la hoja a la misma medida que la medida anotada anteriormente. Esto hará que todo elproceso sea un poco más fácil.
Ahora al colocar el láser será "objetivo" en la hoja de calibración.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
Una vez que el láser se coloca en el agujero, se verá que tiene algo de juego. Aplique elpegamento súper mínimo en el interior del agujero láser. Aplicar una pequeña cantidad depegamento en el lado opuesto del láser.
El truco aquí es alinear el láser con la X inferior de la hoja de calibración mientras el pegamentose seca (aproximadamente 1 minuto). Cuando se suelta el láser debe mantenerse alineado con laX. Que este seco y repita para el láser superior.
Al pegar los láseres se aseguran de que no sobresalgan más allá del acrílico o se frota en la parteinterior del tubo de la electrónica.
Cuidado de no pegar el dedo al láser. Use guantes y gafas de seguridad cuando se utilizapegamentos y disolventes.
Cuando terminaron los láseres se deben secar en el chasis de la electrónica, como se muestra enla figura 3. Cuando esté completamente secado (ver instrucciones para pegamento), los láseresestarán calibrados.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
Step 24 — Paso 24 - Prueba de la dirección del motor y la hélice alineación
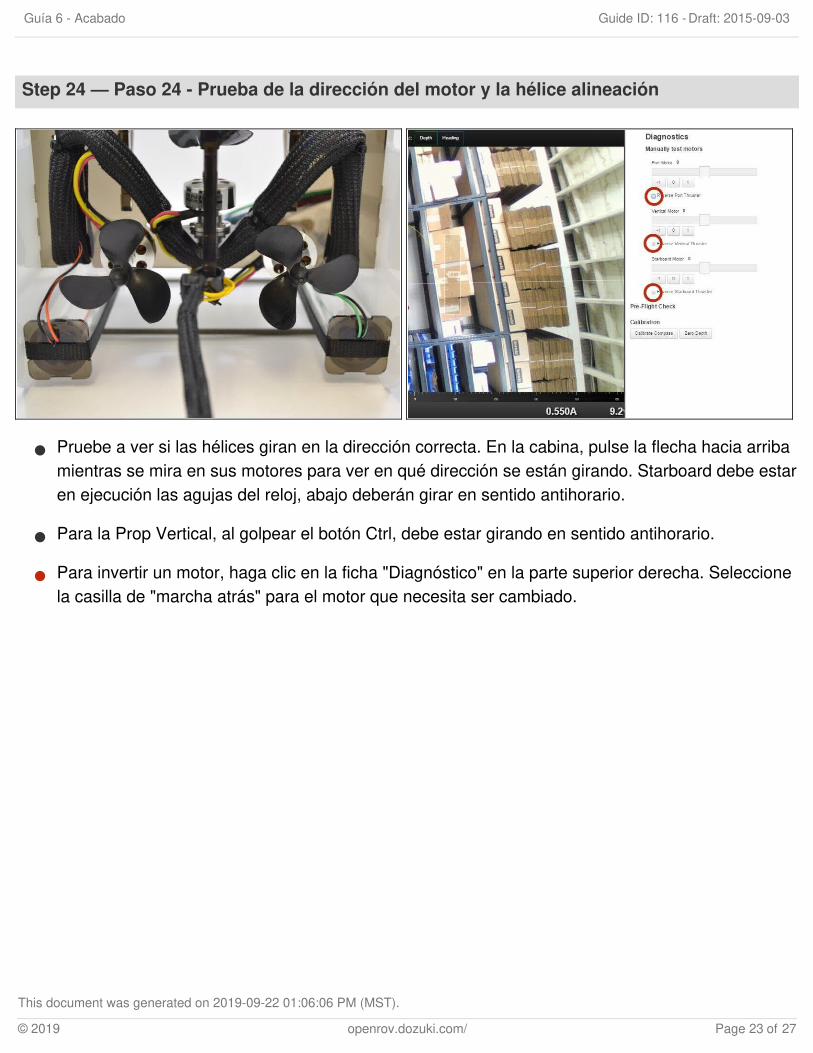
Pruebe a ver si las hélices giran en la dirección correcta. En la cabina, pulse la flecha hacia arribamientras se mira en sus motores para ver en qué dirección se están girando. Starboard debe estaren ejecución las agujas del reloj, abajo deberán girar en sentido antihorario.
Para la Prop Vertical, al golpear el botón Ctrl, debe estar girando en sentido antihorario.
Para invertir un motor, haga clic en la ficha "Diagnóstico" en la parte superior derecha. Seleccionela casilla de "marcha atrás" para el motor que necesita ser cambiado.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
A partir de los pasos anteriores, ya debería haber probado la electrónica y motores antes de cerrarel tubo.
Desconecte el conector DB-25.
Asegúrese de que el tubo principal está limpio.
Compruebe que la junta tórica estén limpias y lubricadas y colocarlos en tanto las tapas laterales.
Alinear el E-chasis como se muestra en la Figura 1. Conecte el DB-25 de nuevo en la tarjeta delcontrolador. Asegúrese de que todos los cables están bien y no oprimen o interfieren en nada.
Deslice el tubo por el chasis de la electrónica y en la tapa de extremo.
Coloque la otra tapa de extremo en el otro lado del tubo. Debe reflejar la otra tapa de extremo.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
Coloque la tapa del extremo de estribor en el otro extremo de alineación (imagen especular) conla tapa de extremo opuesto. Deben encajan muy bien en contra de cada lado del tubo, y usteddebería ser capaz de ver la junta tórica.
Step 27 — Paso 27
Los tapones necesitan los émbolos de la jeringa para facilitar equilibrado.
Coloque el émbolo hacia atrás en las tapas laterales y el asiento que se cierren con el pedazo delacento blanco como se muestra.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
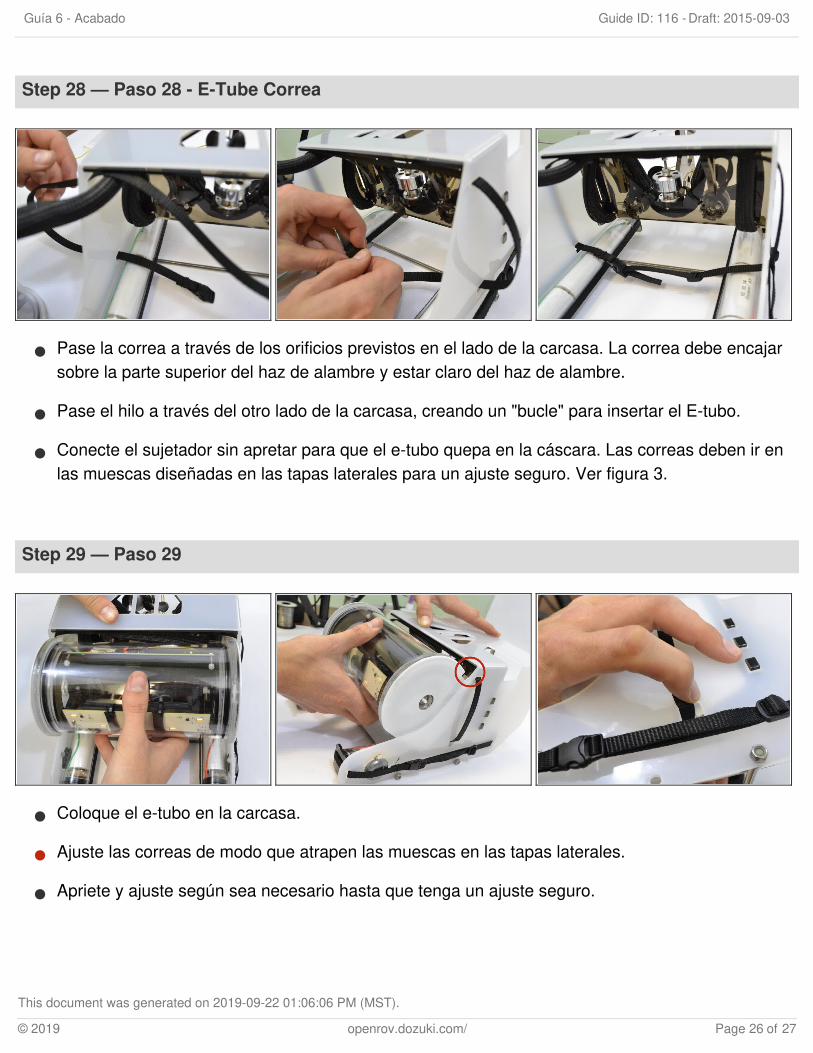
Pase la correa a través de los orificios previstos en el lado de la carcasa. La correa debe encajarsobre la parte superior del haz de alambre y estar claro del haz de alambre.
Pase el hilo a través del otro lado de la carcasa, creando un "bucle" para insertar el E-tubo.
Conecte el sujetador sin apretar para que el e-tubo quepa en la cáscara. Las correas deben ir enlas muescas diseñadas en las tapas laterales para un ajuste seguro. Ver figura 3.
Step 29 — Paso 29
Coloque el e-tubo en la carcasa.
Ajuste las correas de modo que atrapen las muescas en las tapas laterales.
Apriete y ajuste según sea necesario hasta que tenga un ajuste seguro.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).
Si usted compró un sensor IMU /Profundidad, vaya a la guía Cómoensamblar el sensor / ProfundidadIMU.
Step 31 — Paso 31
Increíble! Ahora debería tener unaversión completa OpenROV 2.7!
Pásate por el manual deloperador para obtener másinstrucciones sobre cómoconducir y mantener suOpenROV.
En nombre del equipo de OpenROVy comunidad en general, estamoscontentos de tenerlo con nosotros.Nos vemos en los foros,OpenExplorer, y donde te lleven tusaventuras.
Guía 6 - Acabado Draft: 2015-09-03Guide ID: 116 -
This document was generated on 2019-09-22 01:06:06 PM (MST).