


Fig. 6. Experimental configurat
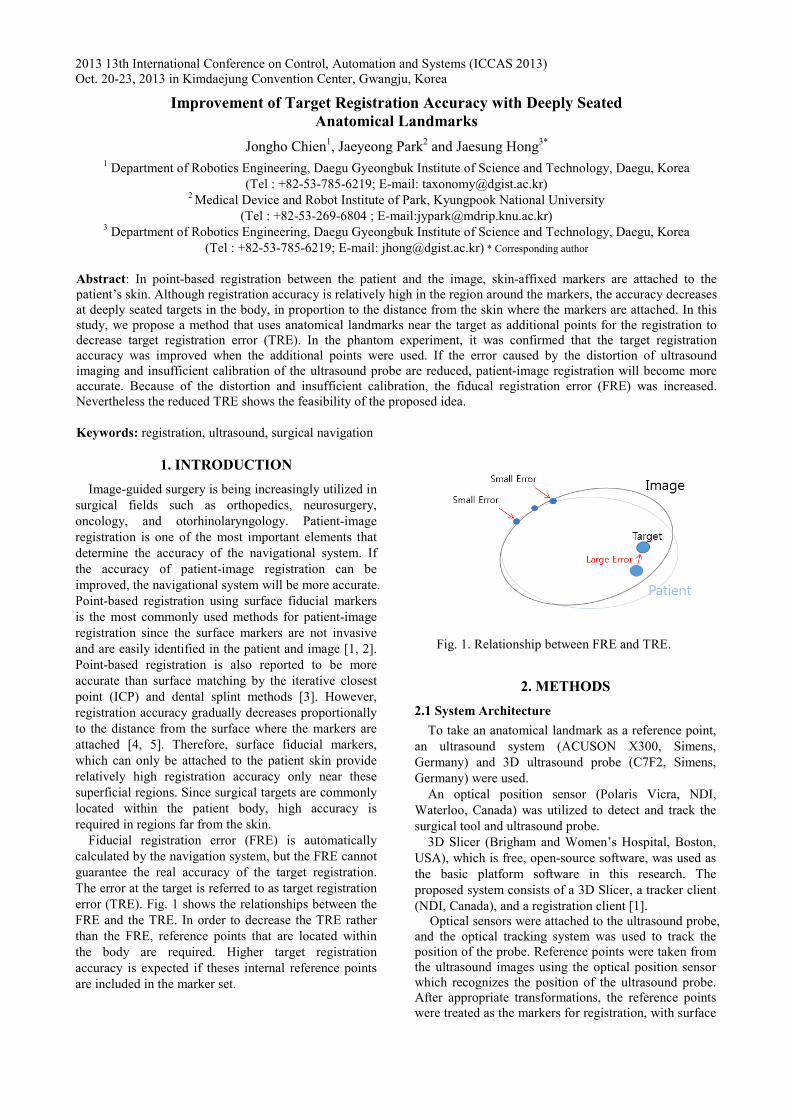
An acrylic box filled with pure watethe ultrasound system. The tracking systhe phantom and the ultrasound probultrasound probe detected landmarks (Fphantom. After appropriate transformaticalculated during calibration, landmarkfiducial markers. The paired point regwas performed between a reconstructecomputed tomography (CT) volumephantom.
Two experiments were performed. depth mark, seven fiducial makers surface of the phantom were used Second, with one depth marker, seven attached to the surface of the phantomregistration. We measured the FRE anexperiment. TREs were measured usinthe inner landmarks, except the point tthe depth fiducial marker.
3. RESULTS
The registration accuracy withou
anatomical landmark was examined. Umarkers and additional one anatomicanumber of trials was 10 for each target.
tion.
er was used with stem tracked both be (Fig. 6). The Fig. 5) inside the ions, which were
ks were used like gistration method ed image of the e data and the
First, without a attached to the for registration. fiducial markers
m were used for nd TRE in every ng three points of that was used for
ut and with an Use seven surface al landmark. The
Fig. 7. Registration erroanatomical landmark
Fig. 7 shows the TREs and
with an anatomical landmark 2.13 ± 0.37 mm. Likewiseanatomical landmark, TRE1s 1.27 ± 0.39 mm, TRE2s were± 0.73 mm, TRE3s were 1.20.47 mm, TRE4s were 1.65 ±mm. Except TRE2, the use ocaused an increase in FRE, TRE.
4. CONCL
In this study, a point-baseincludes an anatomical landmusing an ultrasound systeregistration accuracy with anlandmark was examined. In twas confirmed that the targetimproved when the referenceerror caused by the distortioninsufficient calibration of thereduced, patient-image regaccurate.
ACKNOWLED
This work was supported development program (MOtorhinolaryngology, and invasive multi-DOF surgicaMinistry of Trade, Industry(10040097). It was also suppand Convergence Science DGIST.
REFERE [1] J. Hong, M. Hashizume,
registration tool for suEndosc, Vol. 24, pp. 944-9
[2] J. Hong, N. Matsumoto, RHashizume, “Medical navsurgery based on hybridintraoperative computed tBiomed Eng, Vol. 56, No.
[3] M. C. Metzger, A. Rafii, Pahm, B. Strong, “Comstrategies for computer-aidOtolaryngol Head Neck S2007.
[4] J. M. Fitzpatrick, J. B“Predicting error in registration”, IEEE Trans pp. 694-702, 1998.
[5] W. Zhang, G. Shen, C. Fiducial Configuration onin Image-Guided SurgerBiomed Eng Inform, Vol. 4
or with and without an
d FREs. FREs without and were 0.76 ± 0.12 mm and
e, with and without the were 1.46 ± 0.31 mm and
e 1.69 ± 0.41 mm and 1.89 24 ± 0.47 mm and 0.95 ± ± 0.74 mm and 1.04 ± 0.53 of the anatomical landmark
and a slight decrease in
USIONS d registration method that mark as a reference mark em was proposed. The nd without an anatomical the phantom experiment, it t registration accuracy was e points were used. If the n of ultrasound image and e ultrasound probe can be gistration will be more
DGEMENTS
in part by a research and Medical Image- guided
neurosurgical minimally al robot systems) of the y and Energy of Korea ported by the MIREBrain Center (12-BD-0402) of
ENCES
“An effective point-based urgical navigation”, Surg 948, 2010. R. Ouchida, S. Komune, M. vigation system for otologic d registration and virtual tomography”, IEEE Trans 2, pp. 426-432, 2009. B. Holhaeg-Majert, A. M.
mparison of 4 registration ded maxillofacial surgery”, Surg, Vol. 137, pp. 93-99,
B. West, C. R. Maurer, rigid-body point-based
Med Imag, Vol. 17, No. 5,
Wang, Y. Liu, “Effect of n Target Registration Error ry-A Experiment Study”, 4, pp. 1477-1481, 2010.
283

[6] K. S. Arun, S. D. Blostein, “Least-square fitting of two 3-D point sets”, IEEE Trans Pattern Anal, Vol. 9, pp. 698–700, 1987.
[7] I. M. Germano, “Advanced techniques in image-guided brain and spine surgery”, New York: Thieme, 2001.
[8] E. W. Nottmeier, T. L. Crosby, “Timing of paired points and surface matching registration in three-dimensional (3-D) image-guided spinal surgery”, J Spinal Disord Tech, Vol. 20, No. 4, pp. 268-270, 2007.
[9] J. B. West, J. M. Fitzpatrick, S. A. Toms, C. R. Maurer, Jr., R. J. Maciunas, “Fiducial point placement and the accuracy of point-based, rigid body registration”, Neurosurgery, Vol. 48, No. 4, pp. 810-816; discussion 816-817, 2001.
284







