

1
Índice:
CAPÍTULO 1.-INTRODUCCION. ...................................................... 1-1
1.1. Titulo del Proyecto. .................................................................... 1-1
1.2. Introducción. ............................................................................ 1-1
1.3. Objetivos. ................................................................................ 1-1
1.4. Metodología del trabajo. ............................................................. 1-2
1.5. Resumen del proyecto. .............................................................. 1-3
1.6. Contenido del CD-ROM............................................................... 1-3
CAPITULO 2.-ESTUDIO PRELIMINAR ............................................ 2-1
2.1. Introducción. ............................................................................ 2-1
2.2. Que es un Neutrino. .................................................................. 2-1
2.3. Fuentes de neutrinos. ................................................................ 2-2
2.4. ¿Cómo se pueden detectar los neutrinos? ..................................... 2-3
2.5. Telescopios de Neutrinos. ........................................................... 2-5
2.5.1 Telescopio de neutrinos Antares........................................... 2-6
2.5.2 Otros Telescopios de neutrinos. .......................................... 2-11
2.6. El Telescopio KM3NeT. .............................................................. 2-12
2.6.1. Estructura del Telescopio KM3NeT. .......................................... 2-13
2.6.2. Sistema de Calibración del Telescopio KM3NeT. ................... 2-15
2.6.3 Sistema de Posicionamiento. .............................................. 2-16
2.6.4. Módulo Óptico o DOM “Digital Optical Module”. .................... 2-18
2.6.5. Fotomultiplicadores PMT. .................................................. 2-20
CAPITULO 3.-REQUERIMIENTOS ................................................... 3-1
3.1. Introducción. ............................................................................ 3-1
3.2. Requerimientos de las Comunicaciones. ....................................... 3-1
3.2.1. Comunicación RS232. ........................................................ 3-1
3.2.2. Comunicación I2C. ............................................................ 3-3
3.3. Elección de Diodos LEDS para la Tarjeta “Pulser”. .......................... 3-5
3.4. Requerimientos Eléctricos. ......................................................... 3-5
3.5. Que es una batería? .................................................................. 3-6
3.5.1. Estructura de batería secundaria. ........................................ 3-8
3.5.2. Terminología utilizada en el uso de baterías. ........................ 3-9
3.5.3. El efecto Memoria. ........................................................... 3-11
3.5.4. Efecto de pasivación. ........................................................ 3-12
2
3.5.5. Equilibrado de baterías. .................................................... 3-14
3.5.6. Comparativa de tecnologías de fabricación de baterías. ....... 3-14
3.6. Conclusiones. .......................................................................... 3-23
CAPITULO 4.-DESARROLLO DEL HARDWARE ................................. 4-1
4.1. Tarjeta de potencia del Láser Beacon. .......................................... 4-1
4.1.1. Elementos de la tarjeta de potencia del láser Beacon............. 4-1
4.1.2. El Láser Beacon. ............................................................... 4-1
4.1.3. El Atenuador Óptico (Polarizaor). ........................................ 4-3
4.2. Tarjeta de potencia del láser Beacon. .......................................... 4-4
4.2.1. Requerimientos del Diseño de la tarjeta de potencia. ............. 4-5
4.2.2. Diseño de la tarjeta de potencia del Láser Beacon. ................ 4-6
4.2.2.1. Circuito de Alimentación de la Tarjeta de Potencia. ............. 4-6
4.2.2.2. Circuito de atenuación óptica. ......................................... 4-11
4.2.2.3. Circuito de control de señales lógicas. .............................. 4-15
4.3. Tarjeta de Control del Láser Beacon. .......................................... 4-18
4.3.1. Diseño de la tarjeta de Control del Láser Beacon. ................ 4-19
4.4. Tarjeta del Nanobeacon. ........................................................... 4-22
4.4.1. Tarjeta de Contro de Potencia. .......................................... 4-22
4.4.1.1. Circuito de Control. ....................................................... 4-23
4.4.1.2. Circuito de Potencia. ...................................................... 4-26
4.4.1.3. Circuito de Adquisición de señales. .................................. 4-28
4.4.1.4. Tarjeta de Emisión “Pulser”. ........................................... 4-29
4.5. PCBs....................................................................................... 4-30
CAPITULO 5.-DESARROLLO DEL SOFTWARE .................................. 5-1
5.1 Lenguaje de Programación. ......................................................... 5-1
5.2. Compilación de los PIC mediante PCWH de CCS, ........................... 5-1
5.3. Diseño del Programa en C del Láser Beacon. ................................ 5-2
5.3.1 Descripción de los diferentes bloques del programa del Láser
Beacon. .................................................................................... 5-6
5.4. Diseño del Programa en C del Nanobeacon. ................................. 5-10
5.4.1 Descripción de los diferentes bloques del programa del
Nanobeacon. ............................................................................ 5-12
5.5. Simulación del software programado. ......................................... 5-15
5.6. Programación del PIC mediante PICKIT 2. ................................... 5-18

3
CAPÍTULO 6.-RECIPIENTE DEL LÁSER BEACON. ............................ 6-1
6.1. Características del Recipiente. .................................................... 6-1
6.2. Chasis de aluminio. ................................................................... 6-2
6.3. El cilindro de cuarzo “Rod”. ........................................................ 6-2
6.4. Conector del recipiente. ............................................................. 6-3
6.5. Planos y medidas del Contenedor. ............................................... 6-4
CAPITULO 7.-PRUEBAS REALIZADAS ............................................ 7-1
7.1. Pruebas sobre el Láser Beacon. ................................................... 7-1
7.2. Pruebas Realizadas al Láser Beacon con el ROD instalado. .............. 7-3
7.2. Pruebas Realizadas al Atenuador Óptico ....................................... 7-6
7.3. Diodos Led instalados en el Nanobeacon. ..................................... 7-6
7.4. Pruebas Realizadas al contenedor. ............................................... 7-8
CAPITULO 8.-DISEÑO DEL INTERFACE GRÁFICO........................... 8-1
8.1. Introducción. ............................................................................ 8-1
8.2. Funciones a realizar en el control del laser Beacon. ....................... 8-1
8.3. Imágenes del programa ............................................................. 8-3
CAPITULO 9.-ESTUDIO ECONÓMICO ............................................. 9-1
9.1. Tarjeta de potencia del Láser Beacon. .......................................... 9-1
9.2. Tarjeta de control del Láser Beacon. ............................................ 9-2
9.3. Tarjeta de control del Nanobeacon. ............................................. 9-2
9.4. Tarjeta Pulser del Nanobeacon. ................................................... 9-3
9.5. Presupuesto Total. .................................................................... 9-3
CAPITULO 10.-CONCLUSIONES ................................................... 10-1
10.1. Conclusiones. ......................................................................... 10-1
10.2. Aprendizaje. .......................................................................... 10-2
10.3. Futuras Mejoras. .................................................................... 10-2
CAPITULO 11.-GLOSARIO DE TERMINOS .................................... 11-1
CAPITULO 12.-BIBLIOGRAFÍA .................................................... 12-1
4
Índice de figuras.
1 Fuentes de Neutrinos. ........................................................... 2-2 2 Producción de partículas debida a los rayos cósmicos ................ 2-3
3 Radiación Cherenkov. ............................................................ 2-4 4 Cono de luz producido por el efecto Cherenkov ......................... 2-4
5 Representación del Array de Antares ....................................... 2-6 6 Distribución de líneas Antares ................................................ 2-7
7 Vista esquemática de una línea. .............................................. 2-8 8 Imagen de esfera de Benthos instalada en Antares. .................. 2-8
9 Imagen del Módulo Óptico de Antares. .................................... 2-9 10 Longitud de atenuación de onda del Fotomultiplicador ............. 2-9
11 Estructura con sus tres esferas de Benthos. ......................... 2-10 12. Toma de datos del Telescopio de Neutrinos Antares. ............ 2-10
13. Distribución de líneas KM3NeT. .......................................... 2-13 14. Medidas de un piso del Telescopio KM3NeT. ........................ 2-14
15. Ancla del telescopio KM3NeT. ............................................ 2-14
16. Despliegue de medios. ...................................................... 2-15 17. Ubicación de Nanobeacons en un piso. ................................ 2-16
18. Ubicación del Láser Beacon. .............................................. 2-16 19. DOM “Digital Optical Module”. ............................................ 2-18
20. Estructura del DOM “Digital Optical Module”. ....................... 2-19 21. Tarjeta de potencia y tarjeta Octopus. ................................ 2-20
22. Estructura de un Fotomultiplicador. .................................... 2-21 23. Pasarela electrónica del Módulo Óptico. .............................. 2-21
24. Estructura protocolo RS232. ................................................ 3-2 25. Esquema de conexión del bus I2C. ....................................... 3-3
26. Trama de comunicación I2C. ............................................... 3-4 27. Elementos básicos de una celda recargable. .......................... 3-9
28. Carga y descarga sobre a una batería Ni-Cd ........................ 3-12 29. Efecto exagerado de pasivacion excesiva. ........................... 3-13
30. Imagen de Batería de Litio. ............................................... 3-16
31. Imagen de Pila Recargable de Niquel Cadmio. ..................... 3-18 32. Imagen de una Pila de Ni-MH. ........................................... 3-19
33. Imagen de Batería LiPo de 9.6v ......................................... 3-20 34. Súper Condensadores electrolíticos carbono de doble capa .... 3-22
35. Tabla comparativa de baterías ........................................... 3-23 36. Curva de carga de una celda de Níquel Metal Hidruro. .......... 3-25
37. Grafico V/h para descarga normal. ..................................... 3-26 38. Imagen del Láser Beacon. ................................................... 4-2
39. Imagen de la tarjeta MLC-03A-MP0 ...................................... 4-2 40. Elementos que formaran el Atenuador Óptico. ....................... 4-3
41. Diagrama de bloques de la tarjeta de potencia del Láser ......... 4-5 42. Imagen de configuracion de baterias .................................... 4-6
43. Esquemático de la Alimentación del Láser Beacon. ................. 4-7 44. Distribución de contactos de un relé doble modelo G6S-2 . ..... 4-8
45. LM317T configurado para Imax ............................................ 4-9
46. Esquemático del circuito de Atenuación Óptica. .................... 4-11
5
47. Salida circuito 555 en configuración astable. ....................... 4-12
48. Salida Mosfet de 2 KHz (Frecuencia 555). ........................... 4-13 49. Salida del amplificador en modo Diferencial. ........................ 4-14
50. Salida del amplificador inversor ......................................... 4-14
51. Circuito de control de señales lógicas.................................. 4-15 52. Salida Trigger interno, tarjeta de Potencia del Láser ............. 4-16
53. Pulso utilizado para encender/ Apagar el Láser ................... 4-18 54. Configuración de pines del PIC 16F886 de 28 pines. ............. 4-19
55. Esquemático de la tarjeta de control del Láser ..................... 4-20 56. Circuito de Control del Nanobeacon. ................................... 4-23
57. Salida trigger del PIC 16F886. ........................................... 4-24 58. Salida trigger del PIC tras puertas lógicas. .......................... 4-25
59. Duty del 10% emitido por el PIC16f886. ............................. 4-25 60. Duty máxima emitido por el PIC 16886. .............................. 4-25
61. Circuito de adquisición señales del Nanobeacon. .................. 4-28 61. Circuito de Potencia del Nanobeacon. ................................. 4-26
61. Filtro Paso Bajo de 1 orden. .............................................. 4-27 62. Comparación de señales con o sin MAX961. ........................ 4-29
63. Circuito de la tarjeta de emisión o “Pulser”. ......................... 4-30
64. Placa de potencia del Láser Beacon. ................................... 4-31 65. Placa de Control del Láser Beacon. ..................................... 4-31
66. Placa del Nanobeacon vista TOP. ........................................ 4-32 67. Placa del Nanobeacon vista Bot. ......................................... 4-32
68. Placa Pulser del Nanobeacon. ............................................ 4-33 69. Imagen de PCWH de CCS. ................................................... 5-2
71. Diagrama de flujo del programa del Laser ............................. 5-3 72. Diagrama de flujo de la función Analiza comando ................... 5-6
73. Ejemplo de trama de comunicación I2C. ............................... 5-9 74. Diagrama de flujo del programa del Nanobeacon. ................ 5-10
75. Diagrama de flujo de la función Analiza Trama..................... 5-12 76. Ejemplo de trama recibida. ............................................... 5-14
77. Ejemplo de Simulación de Comunicación I2C. ...................... 5-16 78. Trama I2C enviada. .......................................................... 5-16
79. Estructura Protocolo I2C ................................................... 5-17
80. Ventana de informacion de utilizados. ................................. 5-17 81. Software de programación PICKit 2. Versión 2.5. ................. 5-18
82. Imagen del Contenedor del Láser Beacon. ............................. 6-1 83. Tapas superior e inferior del cilindro del recipiente ................. 6-2
84. Imagen del chasis de aluminio. ............................................ 6-2 85. Imagen del Rod. ................................................................ 6-3
86. Conector del recipiente del Láser ......................................... 6-3 87. Planos del chasis del Láser. ................................................. 6-4
88. Planos del recipiente del Láser ............................................. 6-5 89. Planos de Tapa superior y Cilindro de Cuarzo . ....................... 6-6
90. Planos de la tapa Inferior del recipiente de Titanio. ................ 6-7 91. Medición de energía mediante medidor Laser Star. ................. 7-1
92. Histograma delLáser durante 20 horas. ................................. 7-2 93. Pruebas de energía del Láser ............................................... 7-2

6
94. Distribución de elementos para la realización de la prueba. ..... 7-3
95. Energía emitida por el Láser en funcion del angulo. ................ 7-4 96. Medida del Jitter del Láser. .................................................. 7-5
97. Potencia emitida frente a Tensión Aplicada al At.Optico ........... 7-6
98. Comparativa del rise-time de los diodos analizados ................ 7-7 99. Tabla de características de los diodos Led analizados .............. 7-7
100. Prueba de presión del contendor del Láser ........................... 7-8 101. Diagrama de flujo del programada en Labview. .................... 8-2
102. Panel de control del instrumento virtual. ............................. 8-3 103. Costes componentes de la placa de potencia del Láser .......... 9-1
104. Costes componentes de la placa de control del Láser ............ 9-2 105. Costes componentes de la placa del Nanobeacon. ................ 9-2
106. Costes componentes de la placa Pulser del Nanobeacon. ....... 9-3
Capitulo 1-1
En el primer capítulo voy a describir los objetivos marcados al inicio
del presente proyecto así como la metodología a seguir para la realización del mismo.
1.1. Titulo del Proyecto.
Modelo de Preproducción del Control del Láser Beacon y Mejoras en el
Diseño de la Tarjeta Nanobeacon del Telescopio submarino KM3NeT.
1.2. Introducción.
El proyecto del Telescopio submarino de neutrinos KM3NeT se enmarca dentro de una nueva disciplina denominada "Física de
Astropartículas" que se sitúa en la frontera entre la "Física de Partículas", la "Astrofísica" y la "Cosmología". La idea de un
telescopio de neutrinos es similar a la de los telescopios
convencionales pero en vez de observar luz o fotones, lo que observamos son neutrinos procedentes del espacio exterior.
El telescopio de neutrinos KM3NeT consistirá en una gigantesca red tridimensional de detectores ópticos, fotomultiplicadores (PMT)
sensibles a la luz Cherenkov, y protegidos por esferas de vidrio diseñadas para resistir las altas presiones del fondo marino.
Como todo sistema electrónico de medición, necesita ser calibrado antes de su utilización, para así poder dar fiabilidad a las futuras
medidas realizadas. El telescopio de neutrinos KM3NeT contará con dos sistemas de calibración, formado bien por una serie de diodos de
tipo Led, o por el Láser Beacon. En el presente proyecto se centrará en el diseño, montaje y test del hardware que controlara el Láser
Beacon y en la mejora, montaje y test del hardware que controlara el Nanobeacon.
1.3. Objetivos.
Desarrollar y diseñar los prototipos de control del Láser Beacon y mejorar el del Nanobeacon que formaran parte fundamental en el
sistema de calibración del telescopio submarino de neutrinos KM3NeT.
PPM del Láser Beacon Capitulo 1: y Nanobeacon. Introducción
Capitulo1-2
El prototipo de control del Láser Beacon tendrá que cumplir las siguientes características:
Proporcionar alimentación y señales de control al Láser Beacon.
Proporcionar una señal trigger de niveles TTL con un rango de frecuencias comprendido entre 150 y 2000 Hz.
Seleccionar entre una señal de trigger interna (generada por el mismo), o externa que se nos proporcionara del exterior.
Control sobre el Láser Beacon mediante comunicación RS232.
Suministrar una alimentación y las señales de control sobre el atenuador óptico(Polarizador).
Implementar mediante software Labview un panel de control Virtual capaz de controlar y testear el hardware del láser
Beacon.
El prototipo para el sistema de Nanobeacon tendrá que cumplir:
Seleccionar entre una señal de trigger interna (generada por el
mismo), o externa que se nos proporcionara del exterior. Control sobre el Nanobeacon mediante comunicación I2C.
Seleccionar entre una señal de trigger interna (generada por el mismo), o externa que se nos proporcionara del exterior.
Proporcionar alimentación y señales de control al Led Beacon. Proporcionar una señal trigger de niveles TTL con un rango de
frecuencias comprendido entre 500 y 2000 Hz.
1.4. Metodología del trabajo.
La realización del presente proyecto se ha dividido en las siguientes fases:
1. Búsqueda y análisis de la información sobre composición de
neutrinos, telescopios de neutrinos, KM3NeT. 2. Estudio y análisis de soluciones posibles para la alimentación
del Láser Beacon así como análisis de los principales elementos de la tarjeta de potencia del Láser Beacon.
3. Selección de la alternativa óptima a la alimentación del láser. 4. Diseño del hardware de control del Láser Beacon.
5. Test y pruebas realizadas sobre el Hardware diseñado. 6. Mejora en el diseño del hardware del Nanobeacon.
7. Diseño del software y verificación del hardware del Láser Beacon y Nanobeacon.
8. Futuras mejoras.

PPM del Láser Beacon Capitulo 1: y Nanobeacon. Introducción
Capitulo1-3
1.5. Resumen del proyecto.
En la primera parte del proyecto se hará una breve introducción sobre que son los neutrinos y el porqué de su estudio, además se explicará
como detectar los neutrinos, que es un telescopio de Neutrinos, se hará una breve descripción del Telescopio de Neutrinos Antares que
es el precursor del proyecto KM3NeT, así como el funcionamiento y los principales elementos del telescopio KM3NeT, también se
mencionaran otros telescopios de neutrinos de similares características.
Acto seguido se describirá el sistema de comunicación RS232 y I2C
que serán necesarios para el control del hardware, además se hará un estudio teórico sobre las posibles soluciones para la alimentación
de la tarjeta de potencia del Láser Beacon.
Después se detallarán los elementos del hardware y las características principales de éstos, además de la programación del
sistema y el diseño de la interface grafica para el testeo y verificación del mismo, así como las herramientas empleadas. Justificando en
cada uno de los casos su elección, además se detallarán aquellos comandos RS232 y I2C utilizados para la configuración del sistema.
Después se detallarán las pruebas realizadas sobre los elementos
principales del diseño del Laser Beacon así como del Nanobeacon.
Finalmente se hará una mención de la documentación consultada, además de mostrar los planos, esquemas, planificacion y el coste
económico total.
1.6. Contenido del CD-ROM.
En la presente memoria se adjuntara un CD-ROM que contiene:
Copia de la memoria en formato PDF. Codigo fuente que se ha programado en los
microcontroladores.
Archivos del programa en Labview utilizado en el test del hardware.
Hojas de características de los componentes empleados. Notas de aplicación utilizadas.
Los planos de Orcad de las placas utilizadas.

Capitulo 2-1
2.1. Introducción.
En este capítulo se explicarán los conceptos necesarios para entender
la relevancia del estudio de neutrinos, que son y cómo es posible detectarlos, así como una descripción de los telescopios de neutrinos.
2.2. Que es un Neutrino.
Los neutrinos son un tipo de partículas con una masa
extraordinariamente pequeña y sin carga eléctrica, están clasificadas dentro del Modelo Estándar de las partículas elementales como
leptones(1). El leptón más conocido es el electrón, existen tres tipos de leptones cada una con un doblete formado por un leptón cargado
pudiendo ser electrón, muon o tau, y su correspondiente neutrino:
Neutrino Electrónico (Ve). Neutrino Muónico (Vµ).
Neutrino Tauónico ( ).
Los leptones no sienten la interacción "fuerte", que es la fuerza que une a los quarks(2) para formar protones y neutrones y a estos para
formar núcleos atómicos.
Casi todo lo que se conoce acerca de los objetos celestes que pueblan
el Universo procede del estudio de la luz que emiten o reflejan dichos objetos. El estudio del universo mediante los fotones tiene muchas
ventajas puesto que son estables, no tienen carga eléctrica y se producen copiosamente. Son fáciles de detectar en un amplio rango
de energías y los espectros observados aportan una detallada información sobre las características físicas y químicas de los objetos
que los emiten. Sin embargo, los fotones pueden ser absorbidos por
la materia y son incapaces de atravesar las regiones densas y calientes que constituyen el núcleo central de las estrellas, las
galaxias, los quasars(3) y otras fuentes astrofísicas de alta energía, por lo que no podemos investigar las propiedades de dichas regiones a
partir de su observación directa.
Esto se traduce en la imposibilidad de observar el Universo a
distancias mayores de cien megapársec(4) con rayos gamma de alta energía debido a que el Universo se vuelve opaco a esta radiación por
lo que las más altas energías producidas por los fenómenos violentos

PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-2
del Universo no serían accesibles a nuestra observación a través de la
radiación electromagnética.
Para poder observar el interior de los objetos astrofísicos y obtener
una descripción del Universo en un amplio rango de energías, se necesita un mensajero sin carga eléctrica de manera que su
trayectoria no se vea afectada por los campos magnético estelares, que sea estable de manera que pueda llegar a la Tierra después de
recorrer enormes distancias y que interaccione débilmente de manera que sea capaz de penetrar en el interior de regiones que son opacas
a los fotones. El único candidato conocido actualmente es el neutrino.
De manera que se puede concluir que pese a la dificultad que ofrecen
para ser detectados los neutrinos son buenas partículas “mensajeras” en cuanto a la información que nos ofrecen.
2.3. Fuentes de neutrinos.
Existen diversas fuentes de neutrinos, algunas fuentes son de origen
natural como los procesos de desintegración en el núcleo solar, rayos cósmicos, supernovas, restos del Big-Bang... y otros de origen
artificial como los neutrinos generados en los reactores de las centrales nucleares. Se estima que el sol emite 2 x neutrinos por
segundo, de los cuáles la Tierra recibe 4 x por segundo y por
cm . La fuente de neutrinos “artificial” más importante es el reactor
de una central nuclear. En la figura 1 podemos ver algunas de las fuentes de neutrinos más importantes.
[1]Fig. 1 Fuentes de Neutrinos.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-3
Los más energéticos son producidos por los rayos cósmicos en
nuestra atmosfera (neutrinos atmosféricos) o fuera de ella. El término rayo cósmico es utilizado para referirse a la radiación de alta energía
que llega a la tierra desde el espacio. Los rayos cósmicos están compuestos en un 90% por protones (núcleos de hidrogeno) y en un
9% de partículas α (se denomina partícula alfa al núcleo de Helio, está constituido por dos protones y dos neutrones).
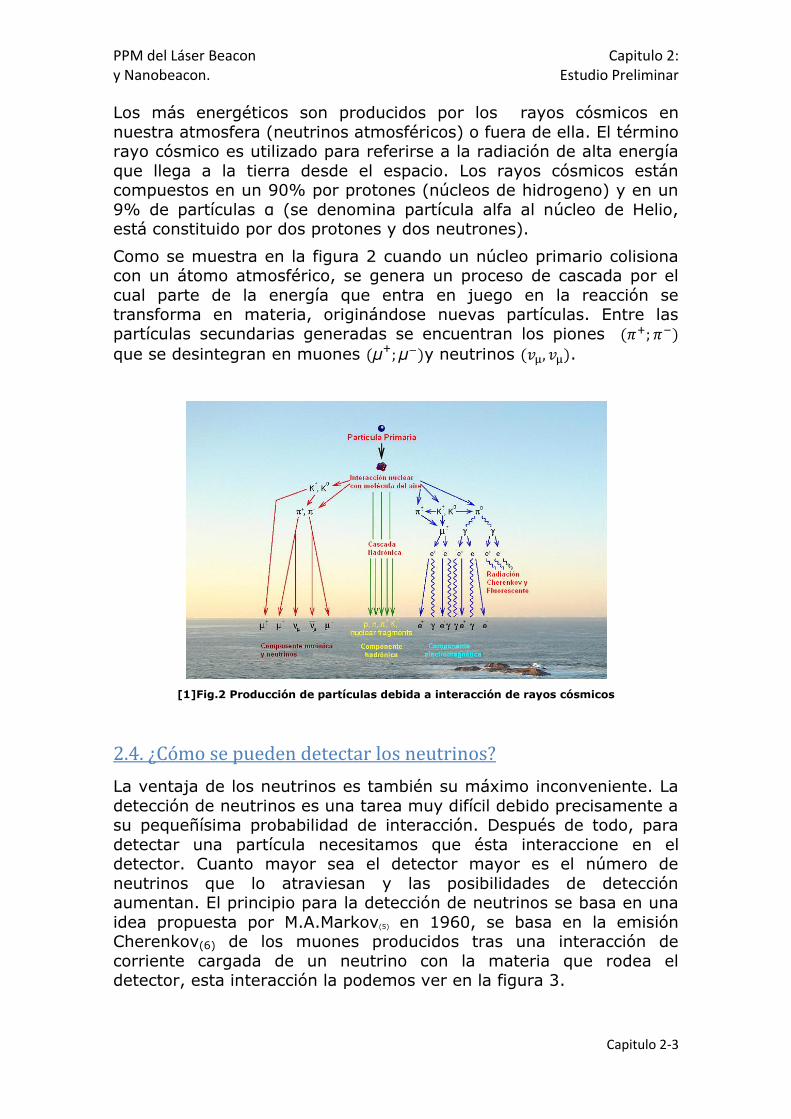
Como se muestra en la figura 2 cuando un núcleo primario colisiona con un átomo atmosférico, se genera un proceso de cascada por el
cual parte de la energía que entra en juego en la reacción se transforma en materia, originándose nuevas partículas. Entre las partículas secundarias generadas se encuentran los piones
que se desintegran en muones y neutrinos .
[1]Fig.2 Producción de partículas debida a interacción de rayos cósmicos
2.4. ¿Cómo se pueden detectar los neutrinos?
La ventaja de los neutrinos es también su máximo inconveniente. La
detección de neutrinos es una tarea muy difícil debido precisamente a su pequeñísima probabilidad de interacción. Después de todo, para
detectar una partícula necesitamos que ésta interaccione en el detector. Cuanto mayor sea el detector mayor es el número de
neutrinos que lo atraviesan y las posibilidades de detección aumentan. El principio para la detección de neutrinos se basa en una
idea propuesta por M.A.Markov(5) en 1960, se basa en la emisión Cherenkov(6) de los muones producidos tras una interacción de
corriente cargada de un neutrino con la materia que rodea el detector, esta interacción la podemos ver en la figura 3.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-4
[1]Fig. 3 .Radiación Cherenkov producida de la interacción de los muones con los neutrinos.
En la figura 3 se observa que la radiación Cherenkov es producida por los muones resultantes de la interacción de un neutrino con la
atmosfera en un primer contacto y con la tierra.
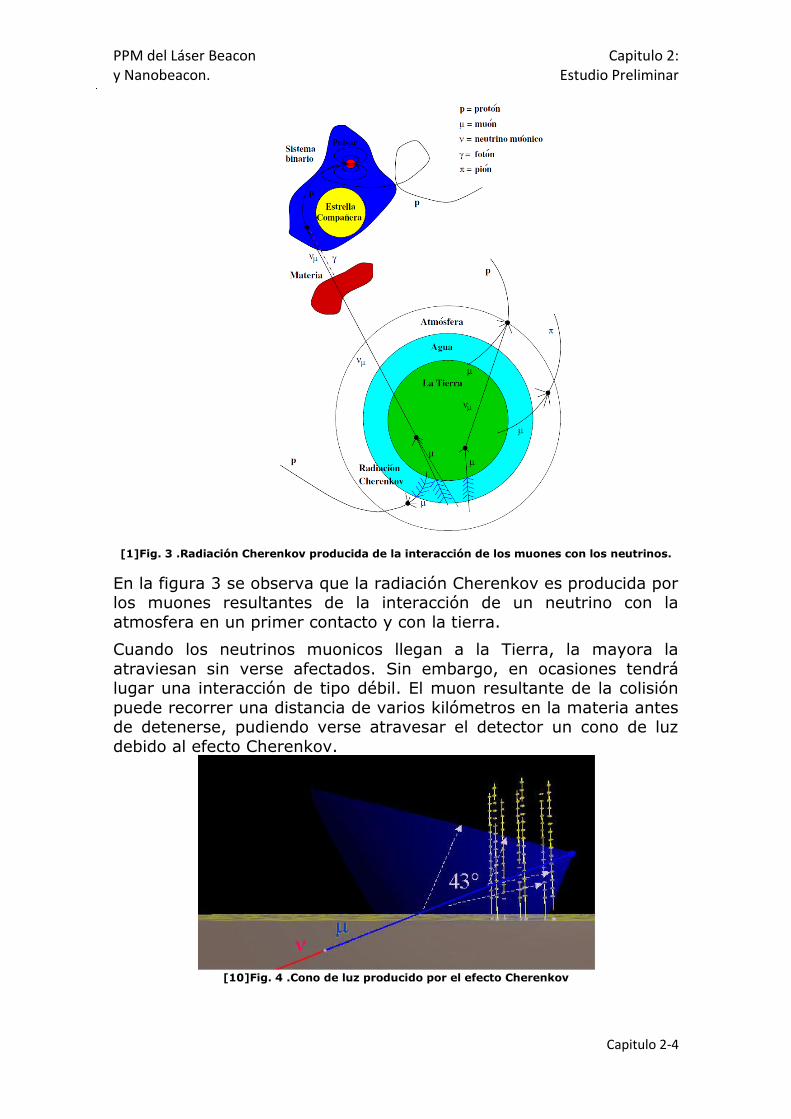
Cuando los neutrinos muonicos llegan a la Tierra, la mayora la
atraviesan sin verse afectados. Sin embargo, en ocasiones tendrá lugar una interacción de tipo débil. El muon resultante de la colisión
puede recorrer una distancia de varios kilómetros en la materia antes de detenerse, pudiendo verse atravesar el detector un cono de luz
debido al efecto Cherenkov.
[10]Fig. 4 .Cono de luz producido por el efecto Cherenkov
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-5
2.5. Telescopios de Neutrinos.
En primer lugar hay que tener en cuenta que aunque se llama telescopio de neutrinos no existe ninguna similitud física con los
telescopios ópticos habituales. La palabra telescopio se utiliza en este caso para subrayar la capacidad genérica de estos detectores para
determinar la dirección de la que proceden los neutrinos y por tanto, la de revelar la posición de las fuentes.
De este modo se puede definir a un telescopio de neutrinos como un
dispositivo diseñado para llevar a cabo la detección de aquellas partículas generadas por la interacción de los neutrinos con la
materia.
La mayoría de telescopios de neutrinos que actualmente están construidos o se encuentran en su etapa de diseño poseen algunas
características comunes. Debido a que el neutrino posee una pequeña probabilidad de interacción con la materia, se necesitan detectores
con un gran volumen de detección efectivo así como un sistema de detección óptica muy sensible, que permita la detección y posterior
amplificación de la señal óptica generada por la partícula que interacciona con la materia debido a que es muy débil. A causa de la
poca señal que deja a su paso una partícula que emite luz de Cherenkov se debe de cuidar la relación señal ruido en el detector.
Las fuentes de ruido usuales en este tipo de dispositivos son las cascadas de partículas elementales producidas por los rayos
cósmicos, que colisionan con la atmósfera, las partículas que se producen por decaimiento radiactivo y los posibles isótopos(7)
radiactivos presentes en las cercanías del detector como por ejemplo
el potasio 40 (K40). Es por esto que la mayoría de telescopios de neutrinos deben poseer un cierto “blindaje” ante estas fuentes de
ruido.
A causa del gran volumen que se necesita para realizar la detección y
teniendo en cuenta la atenuación de la luz en agua o hielo se hace necesario que exista un gran número de fotomultiplicadores(8).
La mayor parte de telescopios de neutrinos están construidos bajo el agua o el hielo, a causa de la escasísima masa que tienen los
neutrinos (menos de una milmillonésima de la masa de un átomo de hidrógeno) rara vez colisionan con algún átomo, y por eso resultan
prácticamente indetectables. Debido a esto se construyen instalaciones gigantescas en lugares apartados de las interferencias,
además de que en ambos medios las partículas generadas por los neutrinos viajan a mayor velocidad que la de la luz generándose la
emisión de luz.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-6
2.5.1 Telescopio de neutrinos Antares (Astronomy a Neutrino
Telescope y Abyss ambientales RES).
Antares que es el primer telescopio de neutrinos submarinos en el
hemisferio norte, es el precursor del telescopio KM3NeT. Por este motivo gran parte de la tecnología que se instalara en KM3NeT, ya ha
sido probada en Antares. Este es un detector de neutrinos que tiene dos objetivos principales, la astronomía de alta energía y la búsqueda
de materia oscura.
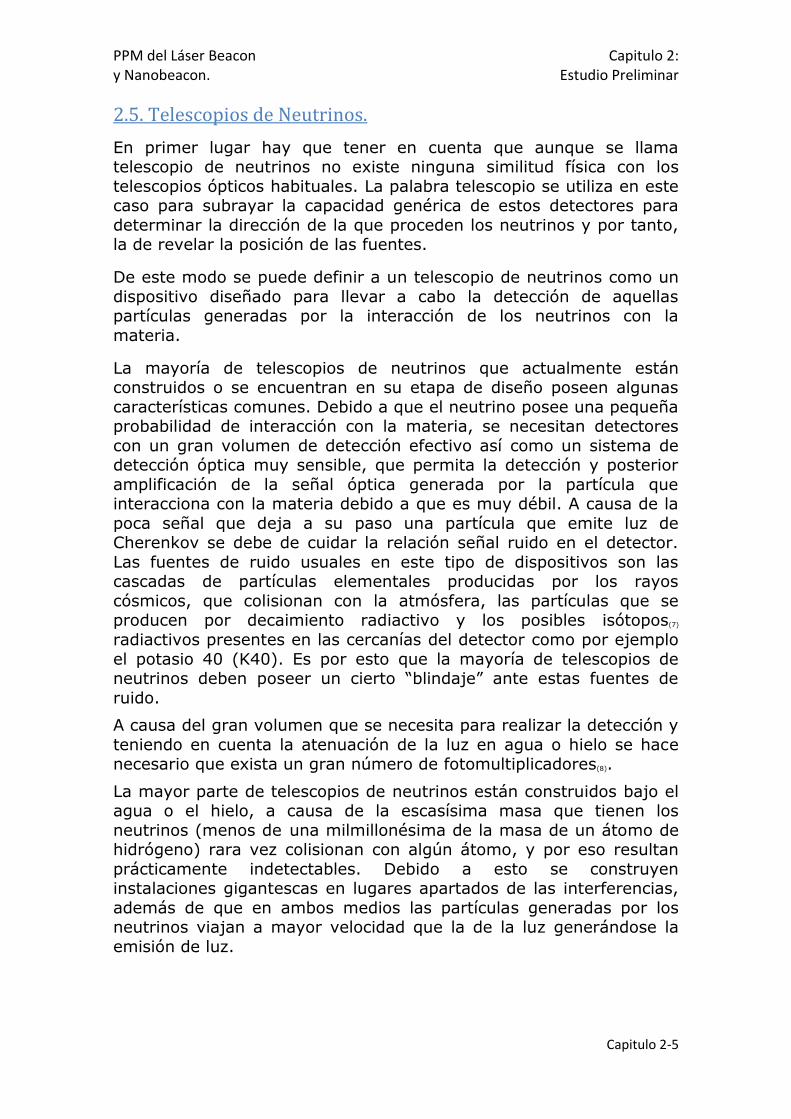
Está compuesto por 12 líneas, en cada línea tiene 25 pisos de altura y
se han instalado setenta y cinco fotomultiplicadores (PMT) con un gran fotocátodo(9) que optimiza la recogida de luz. Las líneas se
mantienen en posición vertical por un peso (dead weight) en su extremo inferior y por boyas en el extremo superior. Su longitud será
de unos 420 metros. La parte activa de la línea comienza a unos 100 por encima del fondo del mar para evitar el fango y la suciedad del
fondo que pueden ser removidos por las corrientes, y dejar recorrido
suficiente para la emisión de los primeros fotones Cherenkov.
Debido a las corriente marinas(10), las líneas sufrirán deformaciones y
oscilaran ligeramente, por eso el material del que está construida la línea no es rígido, sino ligeramente flexible para así poder evitar
rupturas debido a las tensiones y sobresfuerzos mecánicos durante la inmersión. En la figura 5 se puede observar una representación
gráfica del detector y la disposición de las doce líneas que contienen los sensores ópticos del telescopio de Neutrinos Antares.
[11]Fig. 5 Representación del Array de Antares.
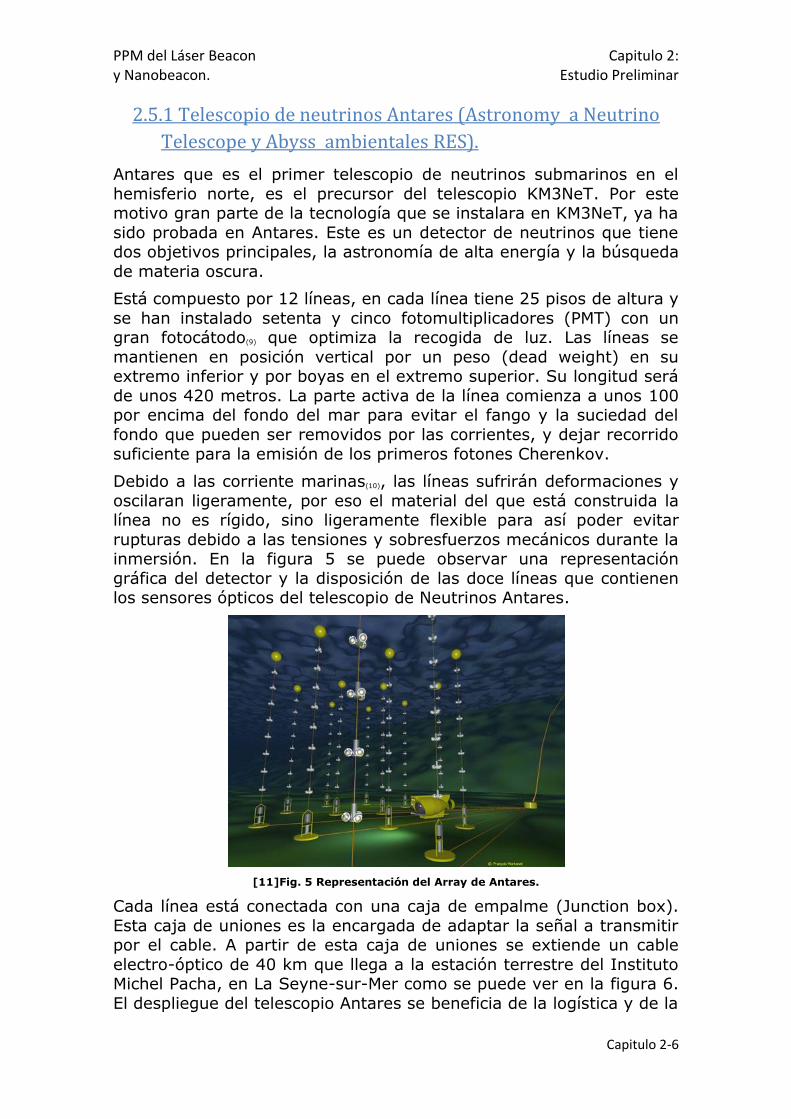
Cada línea está conectada con una caja de empalme (Junction box).
Esta caja de uniones es la encargada de adaptar la señal a transmitir por el cable. A partir de esta caja de uniones se extiende un cable
electro-óptico de 40 km que llega a la estación terrestre del Instituto Michel Pacha, en La Seyne-sur-Mer como se puede ver en la figura 6.
El despliegue del telescopio Antares se beneficia de la logística y de la
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-7
capacidad del IFREMER, Instituto Francés de Investigación para la
Explotación del Mar.
[10] Fig. 6. Distribución de líneas Antares
Dado que es necesario conocer la posición de los módulos ópticos con una precisión de unos pocos centímetros, se utiliza un sistema de
posicionamiento acústico. Además de inclinómetros, en las líneas se
colocaran hidrófonos cuya posición relativa se medirá con respecto a cuatro balizas acústicas que rodean el detector. Con todo ello se
consigue conocer la posición de un módulo óptico con una precisión mayor a 20 cm. Además en el detector se encuentran instaladas
varias fuentes de luz pulsadas (Nanobeacon) que permiten iluminar los módulos ópticos para su calibración temporal y en amplitud.
Además, Antares cuenta con otro sistema de calibración, formado por un Láser alojado en un contenedor junto al ancla, de características
eléctricas diferentes y de menor potencia que el que va a ser instalado en KM3NeT.
En la base de cada línea se coloca un Módulo de Control (SCM). Cada Módulo de Control (SCM) se conecta a la caja de uniones (Junction
box), y de la caja uniones se transmitirán los datos hacia la estación en tierra.
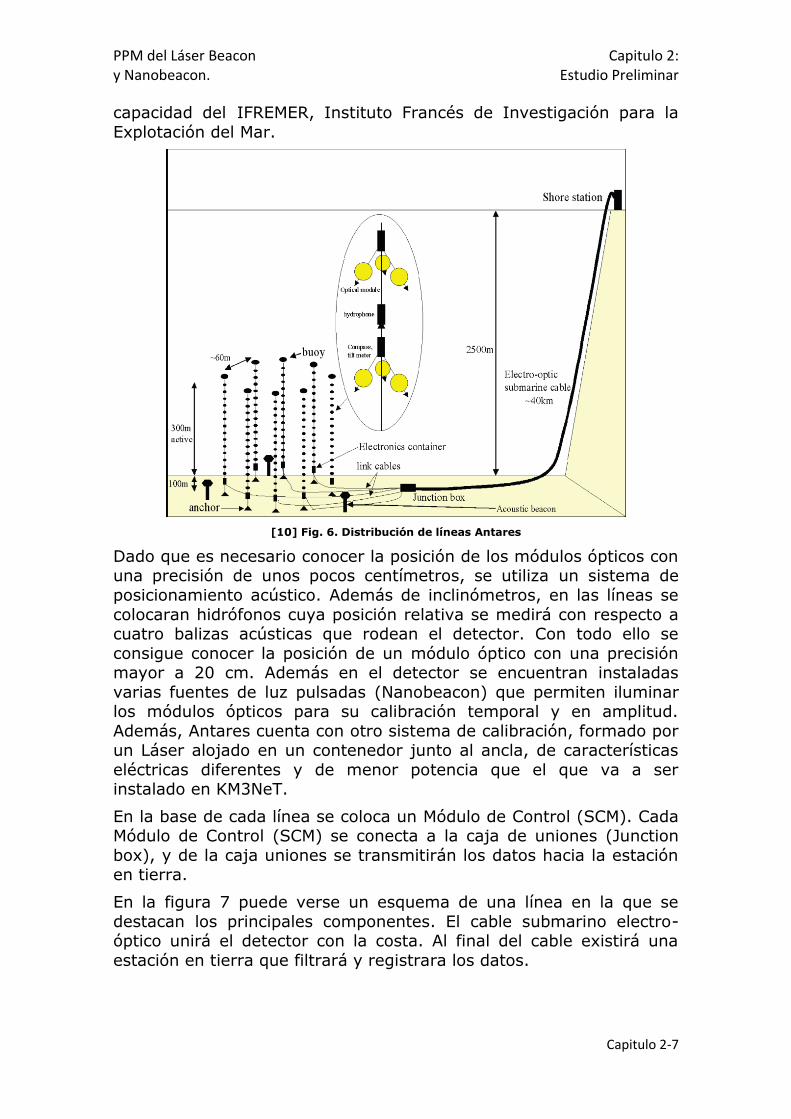
En la figura 7 puede verse un esquema de una línea en la que se
destacan los principales componentes. El cable submarino electro-óptico unirá el detector con la costa. Al final del cable existirá una
estación en tierra que filtrará y registrara los datos.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-8
[4] Fig. 7. Vista esquemática de una línea.
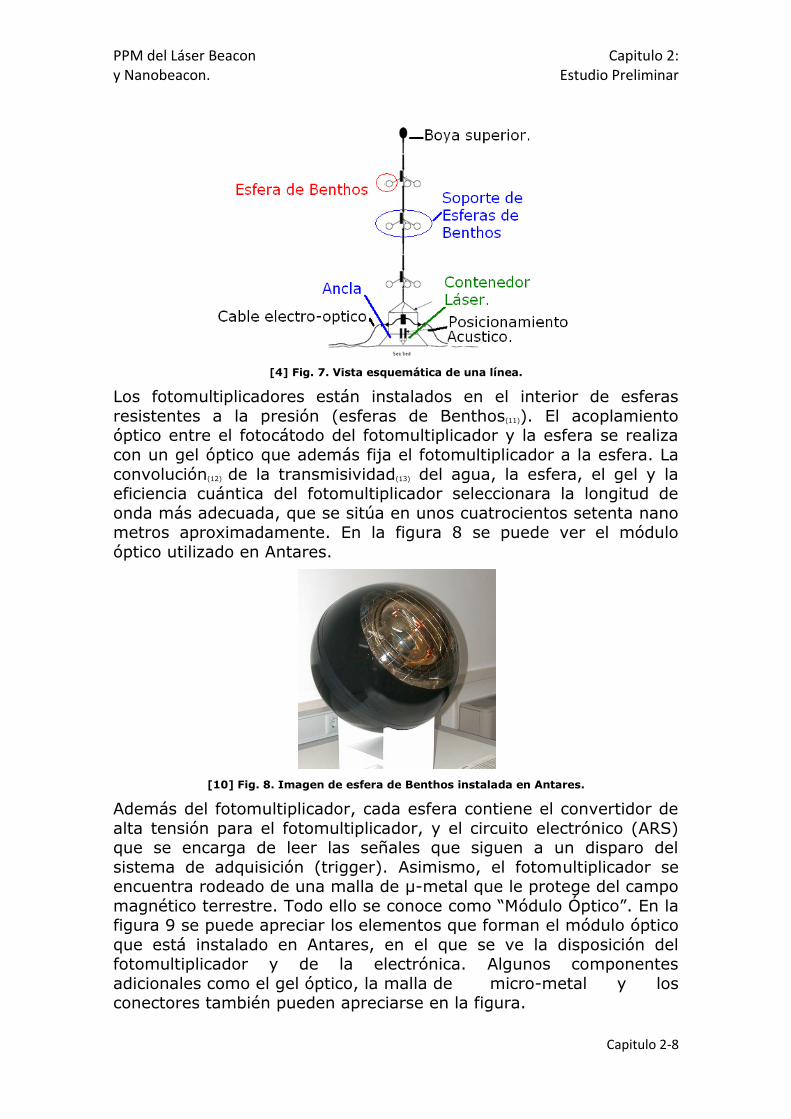
Los fotomultiplicadores están instalados en el interior de esferas
resistentes a la presión (esferas de Benthos(11)). El acoplamiento óptico entre el fotocátodo del fotomultiplicador y la esfera se realiza
con un gel óptico que además fija el fotomultiplicador a la esfera. La
convolución(12) de la transmisividad(13) del agua, la esfera, el gel y la eficiencia cuántica del fotomultiplicador seleccionara la longitud de
onda más adecuada, que se sitúa en unos cuatrocientos setenta nano metros aproximadamente. En la figura 8 se puede ver el módulo
óptico utilizado en Antares.
[10] Fig. 8. Imagen de esfera de Benthos instalada en Antares.
Además del fotomultiplicador, cada esfera contiene el convertidor de
alta tensión para el fotomultiplicador, y el circuito electrónico (ARS) que se encarga de leer las señales que siguen a un disparo del
sistema de adquisición (trigger). Asimismo, el fotomultiplicador se encuentra rodeado de una malla de µ-metal que le protege del campo
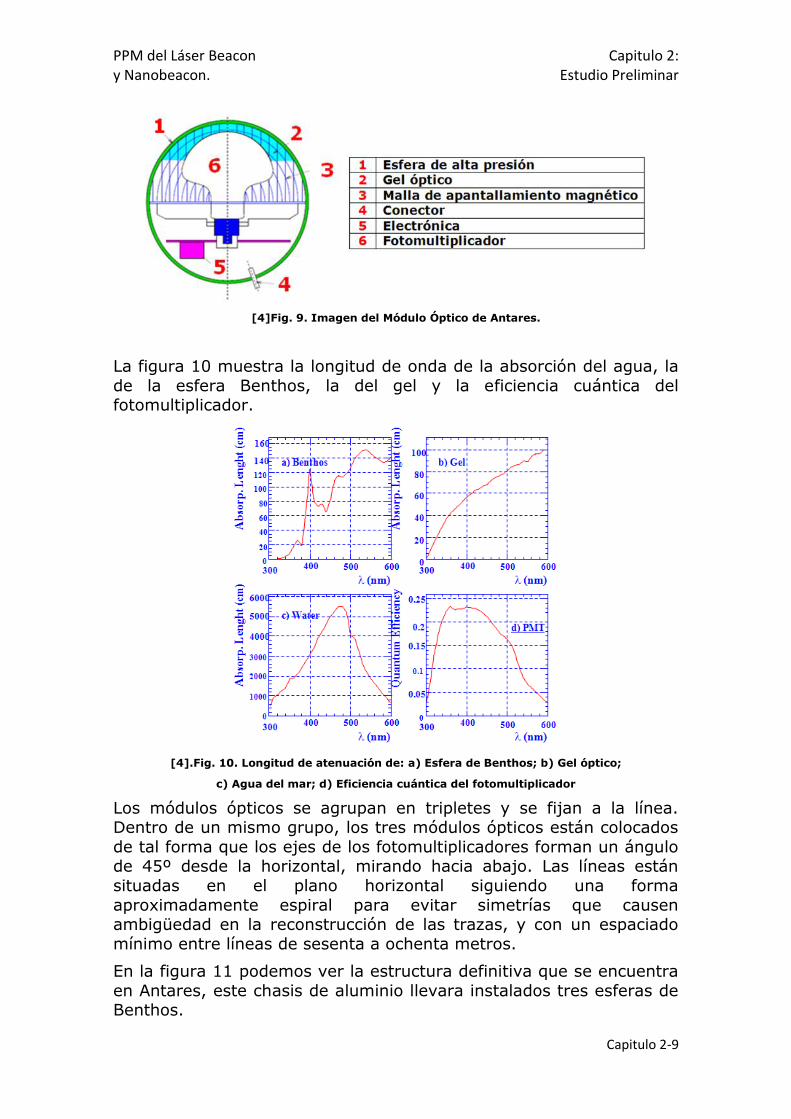
magnético terrestre. Todo ello se conoce como “Módulo Óptico”. En la figura 9 se puede apreciar los elementos que forman el módulo óptico
que está instalado en Antares, en el que se ve la disposición del fotomultiplicador y de la electrónica. Algunos componentes
adicionales como el gel óptico, la malla de micro-metal y los conectores también pueden apreciarse en la figura.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-9
[4]Fig. 9. Imagen del Módulo Óptico de Antares.
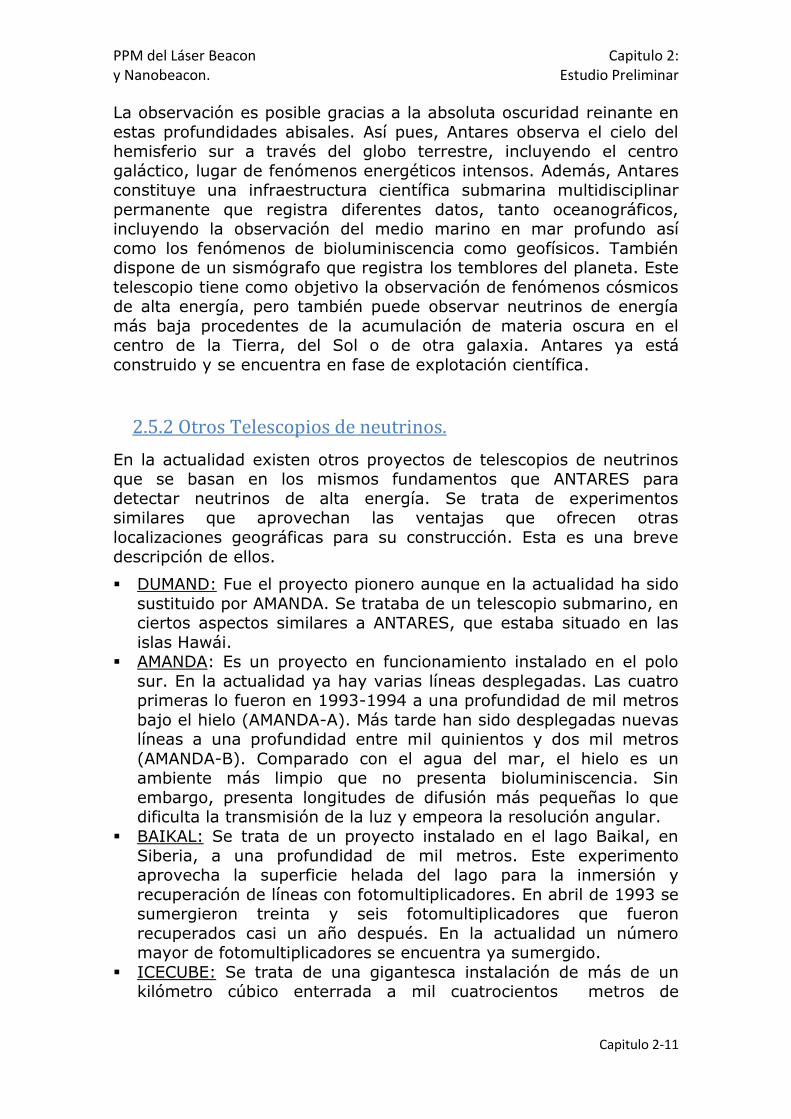
La figura 10 muestra la longitud de onda de la absorción del agua, la
de la esfera Benthos, la del gel y la eficiencia cuántica del fotomultiplicador.
[4].Fig. 10. Longitud de atenuación de: a) Esfera de Benthos; b) Gel óptico;
c) Agua del mar; d) Eficiencia cuántica del fotomultiplicador
Los módulos ópticos se agrupan en tripletes y se fijan a la línea. Dentro de un mismo grupo, los tres módulos ópticos están colocados
de tal forma que los ejes de los fotomultiplicadores forman un ángulo de 45º desde la horizontal, mirando hacia abajo. Las líneas están
situadas en el plano horizontal siguiendo una forma
aproximadamente espiral para evitar simetrías que causen ambigüedad en la reconstrucción de las trazas, y con un espaciado
mínimo entre líneas de sesenta a ochenta metros.
En la figura 11 podemos ver la estructura definitiva que se encuentra
en Antares, este chasis de aluminio llevara instalados tres esferas de Benthos.

PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-10
[12]Fig.11 Estructura con sus tres esferas de Benthos.
Estos fotomultiplicadores, son los ojos de Antares, utilizan un gran volumen de agua de mar para observar la estela de luces
extremadamente débil producida por los muones “ascendentes” debido al efecto Cherenkov. Estos muones son el resultado de la
interacción con la corteza terrestre de los neutrinos que han atravesado la Tierra. En la figura 12 se puede ver una imagen de la
pantalla de control remoto de Antares, en el que se observan las 12 líneas de detección así como la reconstrucción de la trayectoria de los
neutrinos, la distancia recorrida y la intensidad.
[12]Fig 12. Reconstrucción de la toma de datos del Telescopio de Neutrinos Antares.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-11
La observación es posible gracias a la absoluta oscuridad reinante en
estas profundidades abisales. Así pues, Antares observa el cielo del hemisferio sur a través del globo terrestre, incluyendo el centro
galáctico, lugar de fenómenos energéticos intensos. Además, Antares constituye una infraestructura científica submarina multidisciplinar
permanente que registra diferentes datos, tanto oceanográficos, incluyendo la observación del medio marino en mar profundo así
como los fenómenos de bioluminiscencia como geofísicos. También dispone de un sismógrafo que registra los temblores del planeta. Este
telescopio tiene como objetivo la observación de fenómenos cósmicos de alta energía, pero también puede observar neutrinos de energía
más baja procedentes de la acumulación de materia oscura en el centro de la Tierra, del Sol o de otra galaxia. Antares ya está
construido y se encuentra en fase de explotación científica.
2.5.2 Otros Telescopios de neutrinos.
En la actualidad existen otros proyectos de telescopios de neutrinos que se basan en los mismos fundamentos que ANTARES para
detectar neutrinos de alta energía. Se trata de experimentos similares que aprovechan las ventajas que ofrecen otras
localizaciones geográficas para su construcción. Esta es una breve
descripción de ellos.
DUMAND: Fue el proyecto pionero aunque en la actualidad ha sido
sustituido por AMANDA. Se trataba de un telescopio submarino, en ciertos aspectos similares a ANTARES, que estaba situado en las
islas Hawái. AMANDA: Es un proyecto en funcionamiento instalado en el polo
sur. En la actualidad ya hay varias líneas desplegadas. Las cuatro primeras lo fueron en 1993-1994 a una profundidad de mil metros
bajo el hielo (AMANDA-A). Más tarde han sido desplegadas nuevas líneas a una profundidad entre mil quinientos y dos mil metros
(AMANDA-B). Comparado con el agua del mar, el hielo es un ambiente más limpio que no presenta bioluminiscencia. Sin
embargo, presenta longitudes de difusión más pequeñas lo que dificulta la transmisión de la luz y empeora la resolución angular.
BAIKAL: Se trata de un proyecto instalado en el lago Baikal, en
Siberia, a una profundidad de mil metros. Este experimento aprovecha la superficie helada del lago para la inmersión y
recuperación de líneas con fotomultiplicadores. En abril de 1993 se sumergieron treinta y seis fotomultiplicadores que fueron
recuperados casi un año después. En la actualidad un número mayor de fotomultiplicadores se encuentra ya sumergido.
ICECUBE: Se trata de una gigantesca instalación de más de un kilómetro cúbico enterrada a mil cuatrocientos metros de
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-12
profundidad bajo el hielo antártico, dimensiones similares a
KM3NeT, con una superficie de un Kilómetro cubico. NEMO: El proyecto NEMO pretende instalar a unos tres mil
quinientos metros de profundidad en el mar, a veinte y ocho kilómetros de la costa de Sicilia, un cubo de dos kilómetros de lado
formado por una red de fotodetectores (fotomultiplicadores) para observar la radiación de Cherenkov que se produce cuando un
neutrino de alta energía colisiona con una molécula de agua.
NESTOR: Es un proyecto que se planea instalar a una profundidad
de tres mil ochocientos metros cerca de la costa de Pylos en el
mar Egeo. El proyecto consiste en una torre de doce pisos hexagonales de dieciséis metros de diámetro que soportan un total
de ciento sesenta y ocho fotomultiplicadores.
2.6. El Telescopio KM3NeT.
EL telescopio de neutrinos KM3NeT es una infraestructura de investigación submarina europea ubicada en el fondo del Mar
Mediterráneo, aproximadamente a unos tres mil metros, en el que se albergará un telescopio de neutrinos con un volumen de al menos un
kilómetro cúbico. Dicho telescopio permitirá detectar neutrinos cósmicos procedentes de fuentes astrofísicas tales como las
explosiones de rayos gamma, los núcleos activos galácticos, restos de supernovas, etc. Será, por tanto, un poderosísimo instrumento en la
búsqueda de materia oscura en el Universo. El telescopio de neutrinos submarinos KM3NeT constituirá también una plataforma
marina donde podrán ubicarse instrumentos para realizar estudios y
medidas continuas y a largo plazo del medio ambiente marino.
Para el diseño del proyecto KM3NeT cuenta con la experiencia de tres
proyectos pilotos en el mar mediterráneo, como son el proyecto Antares, el proyecto griego Néstor, y el proyecto Nemo.
Como idea global es necesario entender que el telescopio de neutrinos KM3NeT consistirá en un array(14) de detectores ópticos,
fotomultiplicadores (PMT) sensibles a los conos de luz Cherenkov, y protegidos por esferas de vidrio diseñadas para resistir las altas
presiones del fondo marino.
En una primera fase del proyecto KM3NeT, únicamente se va a
instalar una única línea de detección o DU “Detection Unit”, de las ciento cincuenta que tendrá el telescopio cuando esté terminado,
todo esto se hace con el fin de realizar un último test en el lugar y en las condiciones ambientales en las que se va a construir, antes de
empezar a fabricar en masa todos los componentes necesarios para
construir un telescopio de estas características, con el fin de comprobar que todos los dispositivos funcionan correctamente. Al
proceso de diseño y fabricación de esta línea de detección que servirá

PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-13
como modelo para la fabricación en serie de las líneas restantes, se le
ha llamado Pre-Production Model “PPM”. Esta línea de detección estará completa y contara con toda la electrónica necesaria para
poder empezar a detectar neutrinos, se espera que esta línea este operativa y tomando datos a finales de este año.
[7] Fig. 13. Distribución de líneas KM3NeT.
2.6.1. Estructura del Telescopio KM3NeT.
Cada línea o DU “Detection Unit” del telescopio KM3NeT estará
formada de un material que no será rígido, sino ligeramente flexible para evitar rupturas debido a las tensiones y sobresfuerzos
mecánicos durante la inmersión, tendrá una longitud de mil metros, con una boya en su parte superior y un peso muerto o ancla en su
parte inferior, la parte activa de la línea comenzará unos cien metros
por encima del fondo del mar para evitar el fango y la suciedad del fondo que pueden ser removidos por las corrientes como sucede en el
telescopio de neutrinos Antares.
El telescopio KM3Net estará formado por ciento cincuenta líneas o DU
“Detection Unit”, cada línea estará formada por veinte pisos, con una separación entre los pisos de cuarenta metros, y con una separación
de cien metros con las otras líneas del telescopio, cada piso tendrá una longitud de seis metros y se instalarán dos esferas de vidrio o
DOM “Digital Optical Module” en los extremos. En la figura 14 podemos ver la composición y medidas en centímetros de un piso de
una de las líneas del telescopio submarino de neutrinos KM3NeT.

PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-14
[7] Fig. 14. Composición y medidas de un piso del Telescopio KM3NeT.
La estructura del peso muerto o ancla que se instalará en la parte
inferior de cada línea estará compuesta por acero bajo en carbono
(S235JREN 10027-1) (1.0037 EN 10027-2). La estructura y medidas
en centímetros lo podemos ver en la figura 15.
[7] Fig. 15. Estructura y medidas del ancla del telescopio KM3NeT.
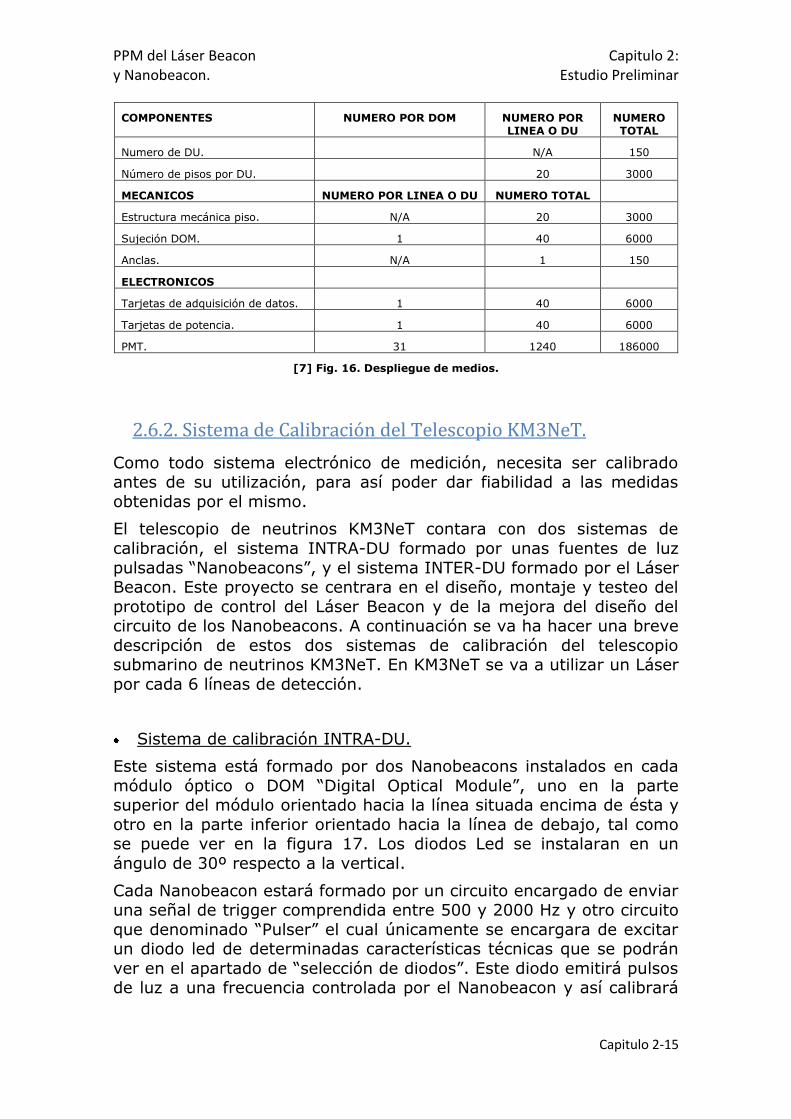
Con el fin de entender un poco más el gran despliegue de medios que
se ha de hacer para poder llevar a cabo un proyecto de estas
características, se va mostrar en la siguiente tabla algunas de las
cantidades de componentes necesarios para la construcción del
telescopio de neutrinos KM3NeT.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-15
COMPONENTES NUMERO POR DOM NUMERO POR LINEA O DU
NUMERO TOTAL
Numero de DU. N/A 150
Número de pisos por DU. 20 3000
MECANICOS NUMERO POR LINEA O DU NUMERO TOTAL
Estructura mecánica piso. N/A 20 3000
Sujeción DOM. 1 40 6000
Anclas. N/A 1 150
ELECTRONICOS
Tarjetas de adquisición de datos. 1 40 6000
Tarjetas de potencia. 1 40 6000
PMT. 31 1240 186000
[7] Fig. 16. Despliegue de medios.
2.6.2. Sistema de Calibración del Telescopio KM3NeT.
Como todo sistema electrónico de medición, necesita ser calibrado antes de su utilización, para así poder dar fiabilidad a las medidas
obtenidas por el mismo.
El telescopio de neutrinos KM3NeT contara con dos sistemas de
calibración, el sistema INTRA-DU formado por unas fuentes de luz
pulsadas “Nanobeacons”, y el sistema INTER-DU formado por el Láser Beacon. Este proyecto se centrara en el diseño, montaje y testeo del
prototipo de control del Láser Beacon y de la mejora del diseño del circuito de los Nanobeacons. A continuación se va ha hacer una breve
descripción de estos dos sistemas de calibración del telescopio submarino de neutrinos KM3NeT. En KM3NeT se va a utilizar un Láser
por cada 6 líneas de detección.
Sistema de calibración INTRA-DU.
Este sistema está formado por dos Nanobeacons instalados en cada
módulo óptico o DOM “Digital Optical Module”, uno en la parte superior del módulo orientado hacia la línea situada encima de ésta y
otro en la parte inferior orientado hacia la línea de debajo, tal como se puede ver en la figura 17. Los diodos Led se instalaran en un
ángulo de 30º respecto a la vertical.
Cada Nanobeacon estará formado por un circuito encargado de enviar una señal de trigger comprendida entre 500 y 2000 Hz y otro circuito
que denominado “Pulser” el cual únicamente se encargara de excitar un diodo led de determinadas características técnicas que se podrán
ver en el apartado de “selección de diodos”. Este diodo emitirá pulsos de luz a una frecuencia controlada por el Nanobeacon y así calibrará
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-16
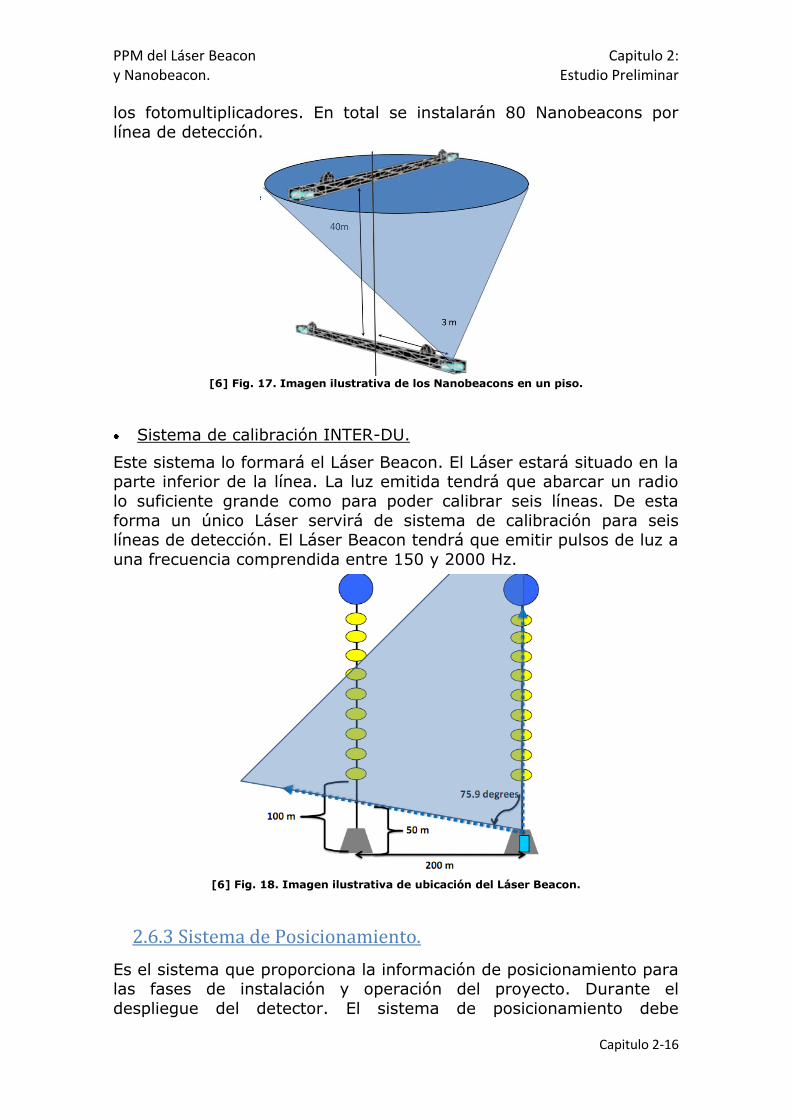
los fotomultiplicadores. En total se instalarán 80 Nanobeacons por
línea de detección.
[6] Fig. 17. Imagen ilustrativa de los Nanobeacons en un piso.
Sistema de calibración INTER-DU.
Este sistema lo formará el Láser Beacon. El Láser estará situado en la parte inferior de la línea. La luz emitida tendrá que abarcar un radio
lo suficiente grande como para poder calibrar seis líneas. De esta
forma un único Láser servirá de sistema de calibración para seis líneas de detección. El Láser Beacon tendrá que emitir pulsos de luz a
una frecuencia comprendida entre 150 y 2000 Hz.
[6] Fig. 18. Imagen ilustrativa de ubicación del Láser Beacon.
2.6.3 Sistema de Posicionamiento.
Es el sistema que proporciona la información de posicionamiento para las fases de instalación y operación del proyecto. Durante el
despliegue del detector. El sistema de posicionamiento debe
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-17
proporcionar la posición de las estructuras mecánicas del telescopio
en un sistema de georeferencia(15) de coordenadas, con una precisión del orden de unos pocos metros. Esto es importante tanto para el
despliegue seguro de las estructuras mecánicas y para la determinación de la posición absoluta y la dirección en que apunta el
telescopio. Durante la fase de operación, el sistema de posicionamiento debe dar las posiciones de los módulos ópticos con la
precisión necesaria para el seguimiento de de muones. Para este requisito, se necesita de un sistema de colocación acústico APS
(acoustic positioning system) para supervisar la posición de los módulos ópticos con una precisión aproximadamente de diez
centímetros y actualizándose la posición de los elementos en todo momento, con el fin de corregir el movimiento de las unidades de
detección debido a las corrientes marinas.
Este sistema estará formado por los siguientes elementos:
Transmisores acústicos anclados en el fondo marino en
posiciones conocidas para un sistema de referencia LBL “Long Base Line”.
Un conjunto de sensores acústicos llamados “hidrófonos” instalados a la estructura de cada línea.
Dispositivos para medir orientación e inclinación de cada piso.
Equipos en tierra para el análisis de datos.
Las posiciones de los receptores acústicos son conocidas mediante un sistema de posicionamiento acústico compuesto de unos sensores
piezo eléctricos instalados junto al cristal en el interior de las esferas o módulos ópticos (DOM) además de una serie de hidrófonos
instalados en cada línea para poder medir el tiempo de vuelo a lo largo de la línea de base (LBL) entre nuestro emisor y dichos
hidrófonos, ATT ”Acoustic Transit Time”, y así mediante un proceso
de triangulación poder estimar la distancia.
El sistema de posicionamiento KM3NeT se basa en la experiencia de
los sistemas desarrollados para los telescopios de Neutrinos ANTARES y NEMO, pero con una mayor precisión debido a la
sincronización de tiempo absoluto entre los transceptores y receptores. Está totalmente integrado con la electrónica del detector.
Para el posicionamiento acústico han utilizado componentes que se encuentran disponibles comercialmente, y ya han sido probados a
tres mil quinientos metros de profundidad por los proyectos pilotos precursores de KM3NeT como son el proyecto ANTARES o NEMO.
Los hidrófonos comerciales son la opción por recomendada para los receptores acústicos. Algunas de las características más importantes
de los Hidrófonos y los pre-amplificadores utilizados en el telescopio para el sistema acústico se pueden ver en la siguiente tabla.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-18
Rango de Frecuencias Desde pocos Hz hasta 70 KHz.
Dimensiones 3cm x1 cm x 1cm Aprox.
Sensibilidad >-205 dB/sqrt [Hz].
pre-amplificador >-175 dB/sqrt[Hz].
Máxima presión soportada 4500 metros
Rango dinámico ADC 192 kHz (96 KHz opcional)
Protocolo de datos Standard AES3-EBU.
Tasa de transmisión acústica 32 bits @ 192 kHz 6.2 Mb/s
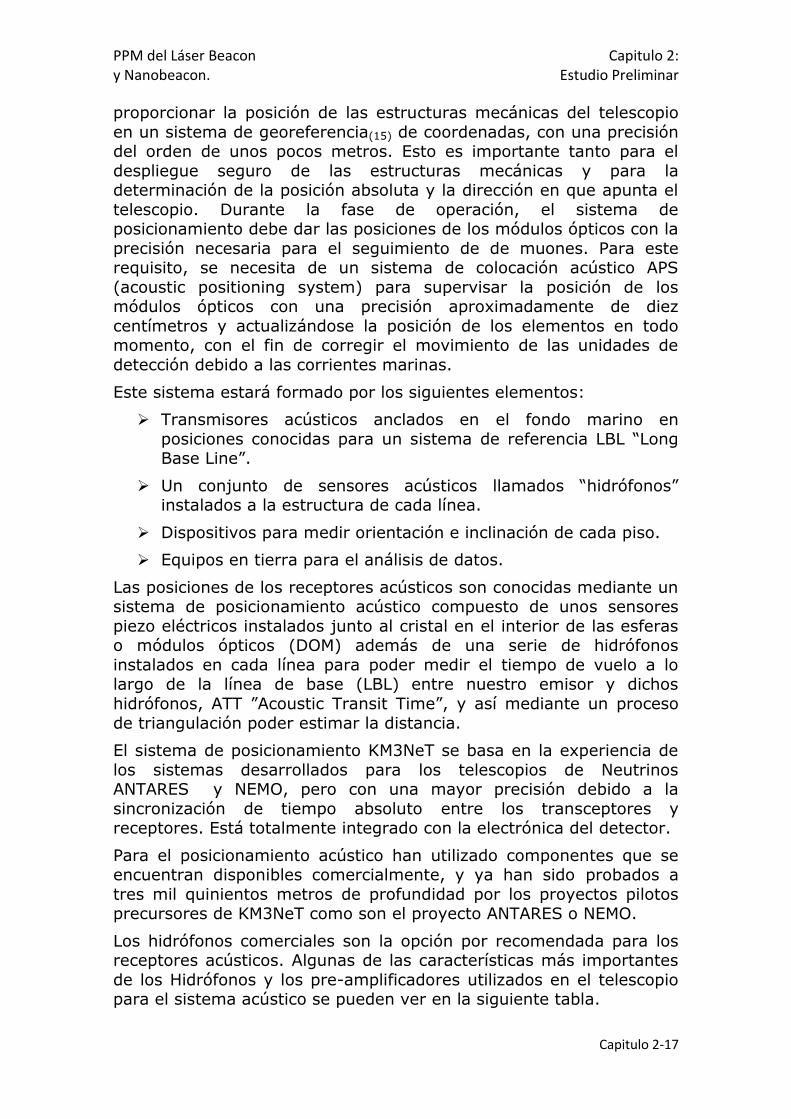
2.6.4. Módulo Óptico o DOM “Digital Optical Module”.
El objetivo de Módulo Óptico (DOM) es de servir como una estructura solida para poder albergar los fotomultiplicadores y los Nanobeacons,
además de poder reducir al máximo el número de conexiones en el telescopio, ya que cada módulo óptico digital contendrá treinta y un
fotomultiplicadores (PMT) de siete centímetros de diámetro cada uno,
además de el sistema de calibración INTRA-DU formado por dos Nanobeacons por DOM, el sensor piezo eléctrico y la circuitería
electrónica necesaria para la adquisición de señales de los fotomultiplicadores y del suministro de potencia a todos los
componentes del DOM.
[3]Fig 19 Referencia Mecánica del DOM “Digital Optical Module”.
Por lo tanto en cada DOM se instalará, además de la circuitería
electrónica encargada de la conexión y adquisición de datos:

PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-19
[3] Fig 20. Estructura de un DOM “Digital Optical Module”.
Las principales características de estas esferas DOM se pueden observar en la siguiente tabla.
Índice de Refracción 1.47
Transmisión >95% (14 mm, λ>350
nm)
Densidad 2.23 g cm-3
Conductividad térmica 1.2 W m-1K-1
Profundidad Soportada 6700 m
Diámetro total 432 mm
Grosor esfera 14 mm
Encogimiento de diámetro por mil
metros de profundidad
0.41 mm
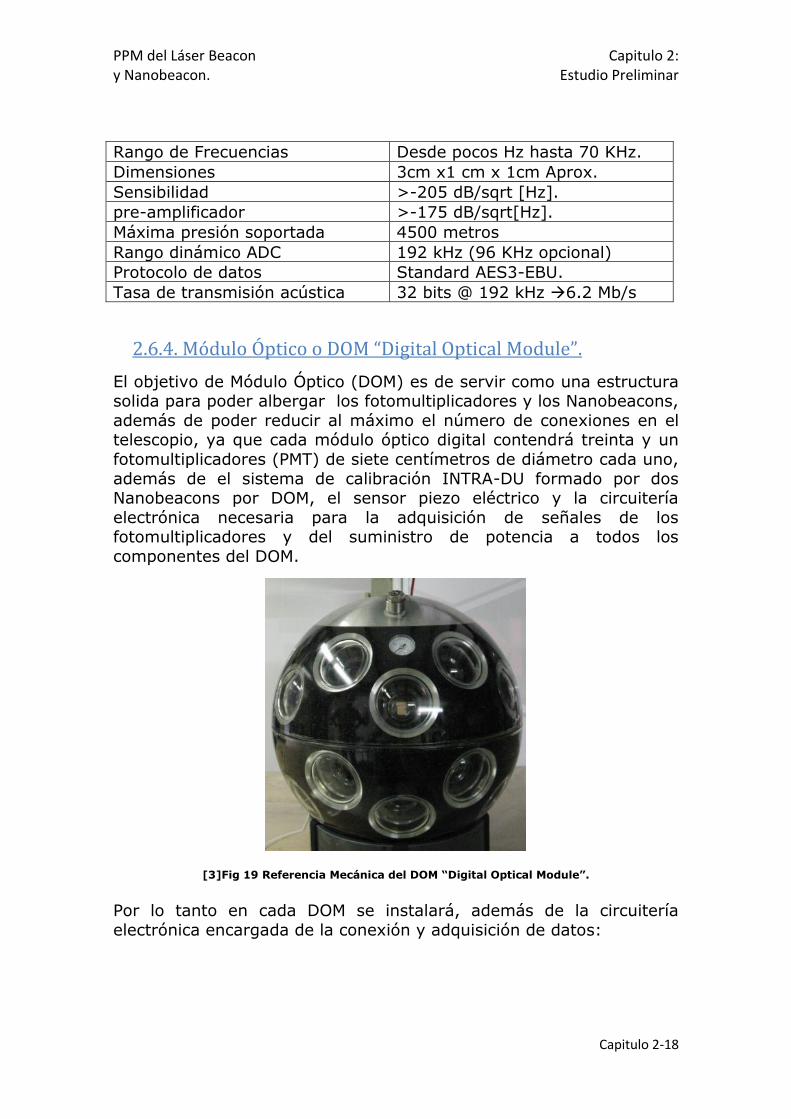
La lectura de datos y el sistema de alimentación estarán incorporados
en el módulo óptico. En el módulo óptico se instalaran dos tarjetas electrónicas, un convertidor de potencia que transformara una
tensión de cuatrocientos voltios recibidos de la línea a tensiones de doce voltios y tres con tres voltios para poder alimentar los
componentes del módulo óptico. Otra tarjeta se encargará de la toma de datos de los fotomultiplicadores denominada Octopus. En la figura
21 se pueden ver la tarjetas de adquisición de datos y del convertidor
de Potencia instaladas en cada Módulo Óptico o DOM.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-20
[3]Fig 21. Tarjeta convertidor de potencia y tarjeta Octopus.
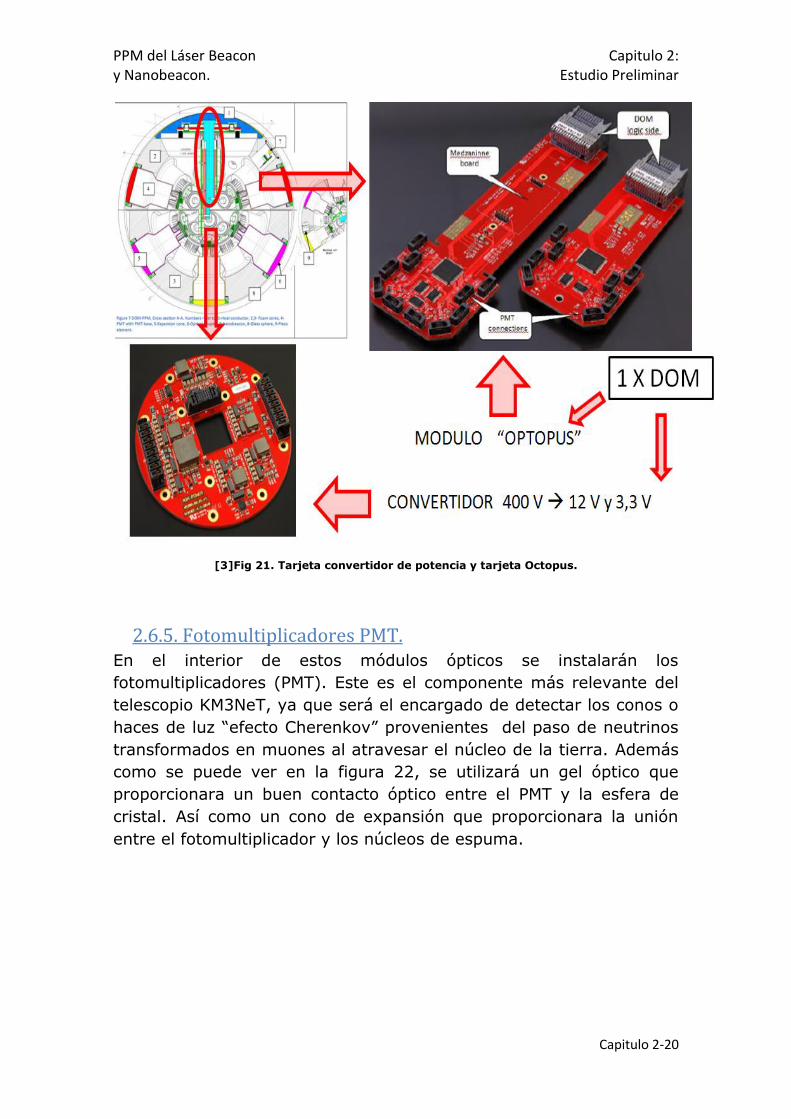
2.6.5. Fotomultiplicadores PMT. En el interior de estos módulos ópticos se instalarán los
fotomultiplicadores (PMT). Este es el componente más relevante del
telescopio KM3NeT, ya que será el encargado de detectar los conos o
haces de luz “efecto Cherenkov” provenientes del paso de neutrinos
transformados en muones al atravesar el núcleo de la tierra. Además
como se puede ver en la figura 22, se utilizará un gel óptico que
proporcionara un buen contacto óptico entre el PMT y la esfera de
cristal. Así como un cono de expansión que proporcionara la unión
entre el fotomultiplicador y los núcleos de espuma.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-21
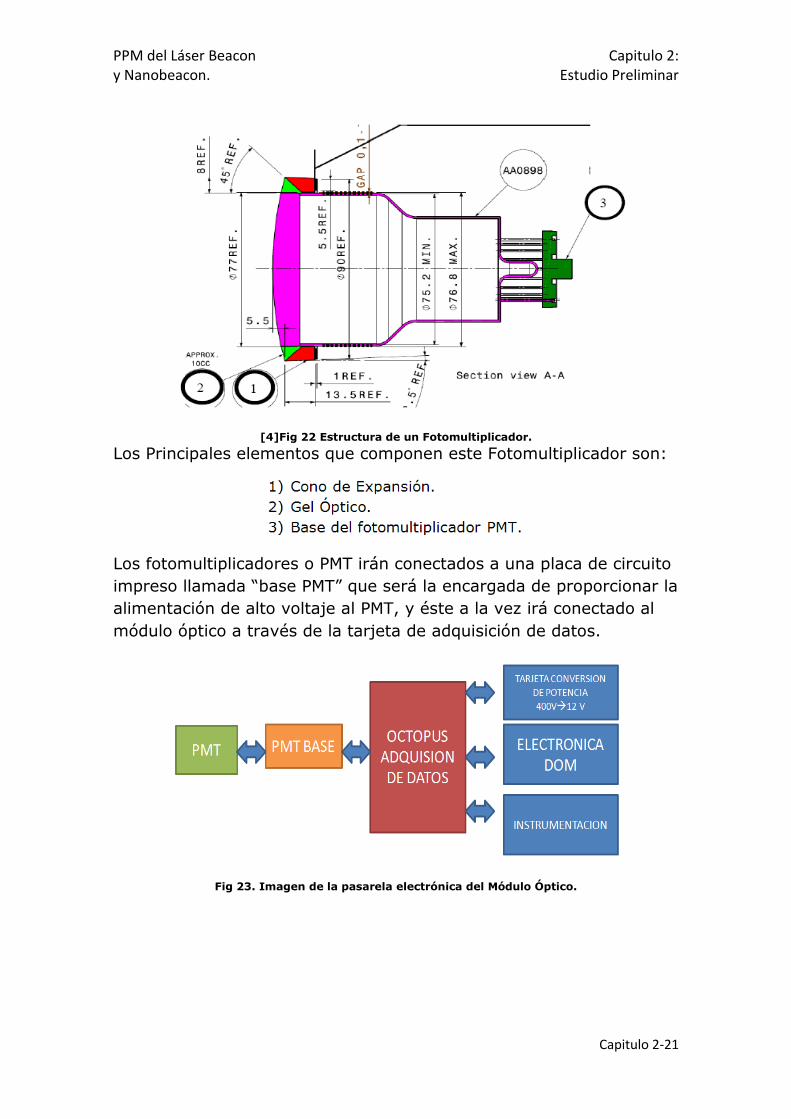
[4]Fig 22 Estructura de un Fotomultiplicador.
Los Principales elementos que componen este Fotomultiplicador son:
Los fotomultiplicadores o PMT irán conectados a una placa de circuito
impreso llamada “base PMT” que será la encargada de proporcionar la
alimentación de alto voltaje al PMT, y éste a la vez irá conectado al
módulo óptico a través de la tarjeta de adquisición de datos.
Fig 23. Imagen de la pasarela electrónica del Módulo Óptico.

Capitulo 3-1
3.1. Introducción.
En este capítulo se explicaran los requerimientos técnicos tanto
eléctricos como lógicos que se han tenido en cuenta a la hora del diseño de los diferentes prototipos presentes en este proyecto, en
primer lugar se hablara de las comunicaciones requeridas por el
consorcio de KM3NeT para los dos prototipos, después se describirán cuales son las características principales que tienen que tener los
diodos se van a instalar en el prototipo del Nanobeacon, y para finalizar se realizara un estudio de las diferentes opciones que se han
tenido en cuenta para la alimentación del Láser Beacon.
3.2. Requerimientos de las Comunicaciones.
El consorcio KM3NeT comunico que tanto para la configuración como puesta en marcha del Láser Beacon la comunicación empleada será
comunicación serie RS232, y tanto para el control del Atenuador Óptico del Láser como para el Nanobeacon se empleará comunicación
serie mediante protocolo I2C. A continuación se van a describir los dos tipos de comunicación necesarias para el desarrollo de este
proyecto.
3.2.1. Comunicación RS232.
El interfaz RS232 es lo que comúnmente se conoce como puerto serie en los ordenadores. Es un puerto de comunicaciones asíncrono con
un terminal dedicado a la transmisión y otro a la recepción. Además el RS232 dispone de terminales dedicados que se emplean para lo
que se conoce como “sincronización hardware”. Estos terminales son conocidos por los acrónimos (DTR “Data Terminal Ready”, DSR “Data
Set Ready”, RTS “Request To Send”, CTS “Clear To Send”). Hemos prescindido de emplear dicha sincronización en el presente proyecto
por no ser imprescindible para la comunicación y no resultar practica
al aumentar el cableado necesario. Así pues en la placa prototipo solo se emplearán las señales básicas conocidas como TX “transmisión de
datos” y RX “recepción de datos”, junto con la correspondiente referencia de masa.

PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-2
El protocolo RS232 se basa en la transmisión de bits en serie con
niveles que van desde los 12V a los -12V como se puede observar en la figura. Se debe adaptar la señal a niveles de +5V (1 lógico) o 0V (0
lógico), para que sean compatibles con los niveles lógicos del microcontrolador.
La señal serie se encuentra a -12V en reposo pasando a +12V durante el tiempo que dura 1 bit para indicar el inicio de la
transmisión de un dato. Dicho dato, que se transmite en serie inmediatamente después, está compuesto por varios bits
(normalmente 8) se envía primero el menos significativo y por último el más significativo. Al terminar el dato se envía un bit opcional de
corrección de errores (paridad) y uno o dos bits a 1 que indican el final de la transmisión del dato.
[1]Fig. 24 Estructura protocolo RS232.
Al tratarse de un protocolo asíncrono no se envía la señal de reloj
para establecer la posición en el tiempo de cada bit. Es por esto que son necesarios los bits de “start” y de “stop” para sincronizar el DTE
“Equipo terminal de datos” con el DCE “Equipo de Comunicación de datos”. Tanto el DTE como el DCE deben conocer y emplear la misma
configuración en el uso de este protocolo.
La comunicación con la tarjeta de control se realiza mediante
comunicación RS232. Esta tarjeta recibirá comandos por RS232 con los que se podrá configurar tanto el Láser Beacon como el atenuador
óptico. Hemos establecido la comunicación con la placa con los siguientes datos de configuración del protocolo:
velocidad de transmisión: 9600 baudios (bits por segundo).
Estructura datos :
Ocho bits de datos. Un bit de stop.
Ningún bit de paridad.

PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-3
Se ha escogido esta configuración por ser la implementada en el piso
del PPM ira instalado el Láser Beacon. Con el objetivo de poder configurar el dispositivo de forma cómoda se ha decidido que el
puerto serie se comportará como un puerto de consola mediante comandos preestablecidos. De esta forma se podrá configurar la
placa empleando cualquier programa de terminal, como por ejemplo el “hyperterminal” de Windows.
Los comandos indicaran de manera explícita la función a realizar, definirán, la frecuencia y demás parámetros que se consideren
oportunos para el correcto funcionamiento del circuito.
3.2.2. Comunicación I2C.
El bus I2C, es un estándar que facilita la comunicación entre micro
controladores, memorias y otros dispositivos con cierto nivel de "inteligencia". Sólo requiere de dos líneas de señal y un común o
masa. Fue diseñado a este efecto por Philips y permite el intercambio de información entre muchos dispositivos a una velocidad aceptable,
de unos 100 Kbits por segundo, aunque hay casos especiales en los que el reloj llega hasta los 3,4 MHz.
Las tres líneas del Bus I2C son:
SCL (System Clock): Línea de los pulsos de reloj que
sincronizan el sistema. SDA (System Data): Línea por la que se mueven los datos
entre los dispositivos.
GND (Masa): Común de la interconexión entre todos los dispositivos "enganchados" al bus.
[13]Fig. 25 Esquema de conexión del bus I2C.
La metodología de comunicación de datos del bus I2C es en serie y sincrónica. Una de las señales del bus marca el tiempo (pulsos de
reloj) y la otra se utiliza para intercambiar datos. Las líneas SDA y SCL son del tipo drenaje abierto, es decir, un estado similar al de
colector abierto, pero asociadas a un transistor de efecto de campo (o FET). Se deben polarizar en estado alto (conectando a la alimentación
por medio de resistores "pull-up") lo que define una estructura de bus que permite conectar en paralelo múltiples entradas y salidas. Las
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-4
dos líneas del bus están en un nivel lógico alto cuando están
inactivas. En principio, el número de dispositivos que se puede conectar al bus no tiene límites, aunque hay que observar que la
capacidad máxima sumada de todos los dispositivos no supere los cuatrocientos pico Faradios. Hay que tener en cuenta que este tipo de
comunicación no está pensada para recorrer grandes distancias, se diseño para comunicar los diferentes tipos de componentes en una
placa o de un dispositivo, aunque se han llegado a realizar comunicaciones de casi 100 metros con este protocolo, eso sí para
poder realizar comunicaciones de tanta distancia se ha tenido que reducir considerablemente la frecuencia de transmisión. El valor de
los resistores de polarización no es muy crítico, está comprendido entre [1,8…47] Kilo Ohmios. Un valor menor de resistencia
incrementa el consumo de los integrados pero disminuye la
sensibilidad al ruido y mejora el tiempo de los flancos de subida y bajada de las señales. Los valores más comunes suelen estar
comprendidas entre [1,8…10] Kilo Ohmios.
Conforme se va analizando el protocolo de comunicación I2C, se
puede imaginar que normalmente habrá varios dispositivos conectados sobre el bus, por lo tanto es lógico que para establecer
una comunicación a través de él se deba respetar un protocolo. Existen dispositivos maestros y dispositivos esclavos y sólo los
dispositivos maestros pueden iniciar una comunicación.
La condición inicial, de bus libre, es cuando ambas señales están en
estado lógico alto. En este estado cualquier dispositivo maestro puede ocuparlo, estableciendo la condición de inicio (start). Esta
condición se presenta cuando un dispositivo maestro pone en estado bajo la línea de datos (SDA), pero dejando en alto la línea de reloj
(SCL).
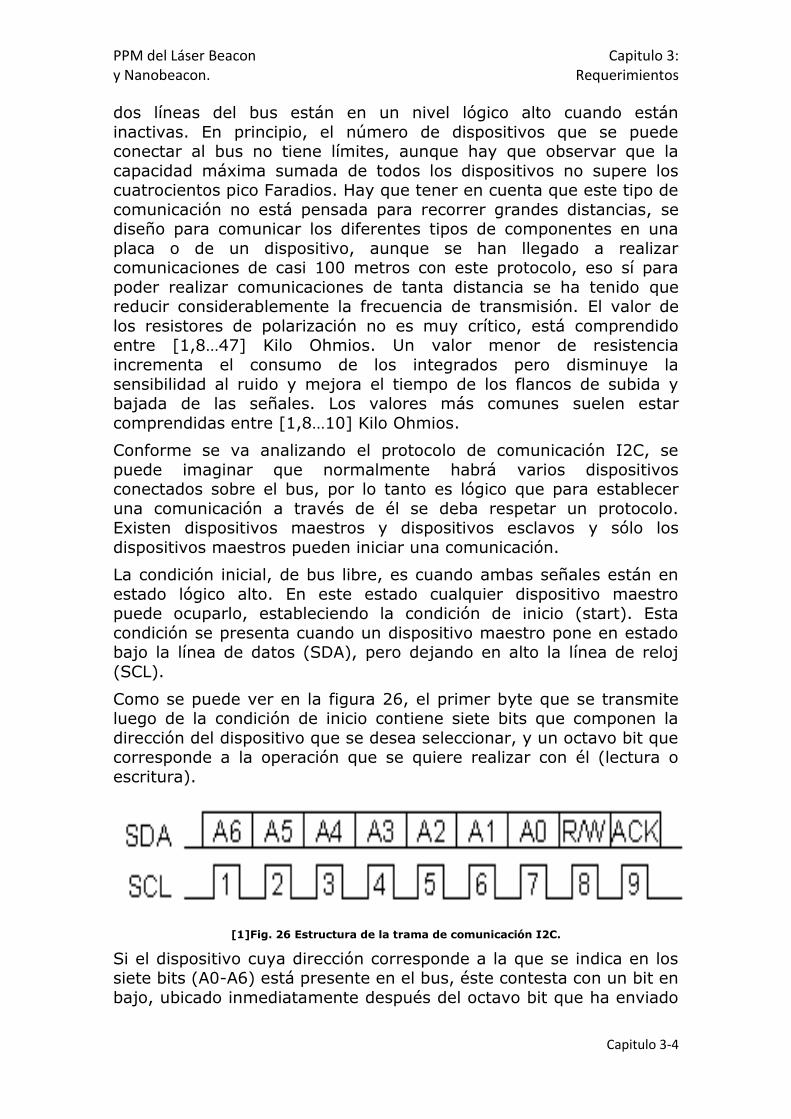
Como se puede ver en la figura 26, el primer byte que se transmite luego de la condición de inicio contiene siete bits que componen la
dirección del dispositivo que se desea seleccionar, y un octavo bit que corresponde a la operación que se quiere realizar con él (lectura o
escritura).
[1]Fig. 26 Estructura de la trama de comunicación I2C.
Si el dispositivo cuya dirección corresponde a la que se indica en los siete bits (A0-A6) está presente en el bus, éste contesta con un bit en
bajo, ubicado inmediatamente después del octavo bit que ha enviado
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-5
el dispositivo maestro. Este bit de reconocimiento (ACK) en bajo le
indica al dispositivo maestro que el esclavo reconoce la solicitud y que está en condiciones de comunicarse. Aquí la comunicación se
establece en firme y comienza el intercambio de información entre los dispositivos. Si el bit de lectura/escritura (R/W) fue puesto en esta
comunicación a nivel lógico bajo (escritura), el dispositivo maestro envía datos al dispositivo esclavo. Esto se mantiene mientras
continúe recibiendo señales de reconocimiento, y el contacto concluye cuando se hayan transmitido todos los datos.
En el caso contrario, cuando el bit de lectura/escritura estaba a nivel lógico alto (lectura), el dispositivo maestro genera pulsos de reloj
para que el dispositivo esclavo pueda enviar los datos. Después de cada byte recibido el dispositivo maestro (quien está recibiendo los
datos) genera un pulso de reconocimiento.
El dispositivo maestro puede dejar libre el bus generando una condición de parada (o detención; stop en inglés).
Si se desea seguir transmitiendo, el dispositivo maestro puede generar otra condición de inicio en lugar de una condición de parada.
Esta nueva condición de inicio se denomina "inicio reiterado" y se puede emplear para direccionar un dispositivo esclavo diferente o
para alterar el estado del bit de lectura/escritura.
3.3. Elección de Diodos LEDS para la Tarjeta “Pulser”.
Como ya se ha visto en el capitulo anterior, el Nanobeacon que
formara parte del sistema de calibración INTRA-DU tendrá que suministrar suficiente potencia a un diodo Led para pueda emitir con
la suficiente intensidad y frecuencia para que el fotomultiplicador situado a 40 metros por encima o por debajo reciba esa señal
luminosa en unas condiciones tan difíciles como es a 3000 metros de profundidad.
Las características del material de la esfera del módulo óptico, el gel óptico, del agua del mar y del propio fotomultiplicador, indican que el
diodo a utilizar debe tener una longitud de onda de aproximadamente entre 400 y 470 nm. Además estos diodos deben tener un tiempo de
subida menor de 3 ns y un ancho de pulso menor a los 5 ns.
3.4. Requerimientos Eléctricos.
Para la alimentación de los dos prototipos el consorcio de KM3NeT nos proporcionara las siguientes señales.

PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-6
Para el control del Láser Beacon:
Señal DC de 12 V, 200 mA. Señal de trigger externo de niveles de TTL y de frecuencia
de 2 KHz.
Para el control del Nanobeacon:
Señal DC de 3,3 V, 50 mA. Señal de trigger externo de niveles de TTL y de frecuencia
de 2 KHz.
Con estas señales que nos proporcionará el consorcio KM3NeT para la
alimentación de los diferentes prototipos se observa que para el caso del control del Láser Beacon esta alimentación de 12 V y 200 mA es
insuficiente, ya que tan solo el Láser Beacon está alimentado a 12 V con unos consumos de corriente constantes de 850 mA y con unos
picos durante el chequeo inicial al arrancar el dispositivo de 1,2 A
durante los 5 primeros segundos desde el inicio. Por lo tanto se necesitará de algún dispositivo que vaya almacenando energía de
forma constante en función de la entrada que proporciona el consorcio KM3NeT, y que llegado el momento permita disponer de
esa energía almacenada de forma instantánea. Por lo tanto el mejor dispositivo para realizar esta función es una batería o acumulador.
A continuación se van a ver una serie de conceptos teóricos sobre que es una batería o acumulador y los diferentes tipos que se utilizan
en la mayoría de dispositivos electrónicos que ayudaran a entender cuáles son los argumentos que se han seguido a la hora de elegir un
tipo de baterías para el prototipo del Láser Beacon.
3.5. Que es una batería?
En primer lugar se puede definir una batería o acumulador eléctrico
como un dispositivo que almacena energía eléctrica usando procesos electroquímicos y permite devolverla luego para ser usada. Uno de los
principales inconvenientes de la energía eléctrica es la dificultad de su almacenamiento. Las baterías son una de las pocas formas fiables de
almacenar la energía eléctrica.
Existen muchas formas de clasificar las baterías, por su tamaño,
peso, características de funcionamiento, campo de aplicación, etc. Se diferencian según tengan o no la posibilidad de ser cargadas una vez
hayan sido descargadas, de este modo tenemos dos grandes grupos:
Baterías primarias: Estas baterías no permiten ser recargadas una
vez que han sido descargadas. Por tanto, cuando una batería
primaria ha agotado su energía debe ser sustituida por otra batería. El campo de aplicación de las baterías primarias se
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-7
enmarca fundamentalmente dentro de las potencias bajas y de ahí
que sean generalmente de tamaño pequeño.
Baterías secundarias: Estas baterías pueden ser recargadas una vez que han sido descargadas, de ahí que también se les
denomine como baterías recargables o acumuladores. Las baterías secundarias se comercializan en un amplio margen de
capacidades, desde capacidades bajas (algunos cientos de miliamperios-horas) hasta capacidades medias y altas (varias
decenas o centenas de amperios-horas) y cada día adquieren mayor importancia sobre todo en aplicaciones donde se necesitan
potencias medias y altas. Generalmente estas baterías están preparadas para funcionar con razones de descarga altas y en un
margen amplio de temperaturas.
Para la realización de este proyecto, obviamente sólo nos vamos a centrar en las baterías secundarias, ya que se trata de un dispositivo
que va a estar instalado en un lugar inaccesible para el ser humano, resultando imposible la sustitución de las baterías.
Este tipo de baterías secundarias de media y gran capacidad se utilizan en multitud de aplicaciones, sobre como baterías de arranque
en vehículos de motor de combustión interna.
Entre otras aplicaciones también se pueden mencionar las siguientes:
Carretillas paletizadoras. Sillas de ruedas autopropulsadas para minusválidos.
Vehículos ligeros (vehículos de golf, motocicletas). Sistemas de energía de emergencia.
Sistemas de alimentación ininterrumpida (SAIs).
Cada vez más está aumentado significativamente el interés sobre las
baterías secundarias como fuente de energía para los vehículos
eléctricos y vehículos híbridos. Debido al gran número de aplicaciones en las que se pueden utilizar este tipo de baterías, se van a dividir
según la forma de trabajo de las mismas:
Régimen estacionario: Estas baterías se cargan desde una fuente
primaria, como puede ser la red eléctrica, y ocasionalmente se descargan sólo cuando la alimentación disminuye o no está
disponible. De esta forma para mantener la batería completamente cargada es necesario aplicarle un régimen continuo de carga.
Estas baterías se utilizan entre otros en vehículos con motor ya que sólo la utilizamos para el arranque del motor y cuando el
vehículo este movimiento se va recargando la batería. También se utiliza en sistemas de alimentación ininterrumpida (SAI) ya que
sólo suministraría corriente en caso de fallo de la alimentación.
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-8
Regímenes cíclicos de carga-descarga: Este tipo de baterías, al
igual que las primarias, la descarga se realiza sobre un circuito eléctrico al cual le sirve como fuente de alimentación. Ahora a
diferencia de las primarias que no se pueden recargar. Las secundarias llegado el momento pueden recargarse desde una
fuente primaria como puede ser la red eléctrica. Este tipo de baterías se suelen utilizar en la mayoría de los sistemas de
tracción eléctrica como son los vehículos industriales, los vehículos eléctricos, etc.
Como diferencia principal entre una batería secundaria diseñada para trabajar en un régimen continuo de ciclos de carga-descarga y otra
diseñada para trabajar en régimen estacionario, se encuentra en la capacidad que tienen las primeras en asimilar más ciclos de carga-
descarga con gran profundidad en la descarga. Debido a esto el
fabricante expresa la vida útil de una batería que este diseñada para trabajar en régimen estacionario en “años de vida” mientras que en
una batería diseñada para funcionar en ciclos de carga-descarga la expresa en “número de ciclos de carga-descarga. En ambos casos se
casos admiten antes de perder un determinado tanto por ciento de su capacidad nominal (aproximadamente un veinte por ciento de la
capacidad nominal de la batería).
El número de ciclos de carga-descarga a que puede someterse una
batería está relacionado directamente con la profundidad de la descarga. Por tanto, la vida útil se indica para un determinado tanto
por ciento de descarga, generalmente el 80 por ciento de la capacidad nominal de la batería.
Para la realización de este proyecto nos centraremos en baterías secundarias diseñadas para trabajar en régimen continuo de ciclos de
carga-descarga, tomando que una batería diseñada para aplicaciones
cíclicas debe estar preparada para resistir muchos más ciclos de carga-descarga bajo regímenes de funcionamiento severos que una
batería diseñada para aplicaciones estacionarias.
3.5.1. Estructura de batería secundaria.
Ahora que ya se ha explicado que es una batería o acumulador, y los
diferentes tipos que hay, se verán sus elementos principales.
Una batería se compone de un conjunto de elementos individuales (o celdas) conectados en serie o en paralelo con el fin de conseguir la
tensión y la capacidad deseada. Cada una de ellas tiene un voltaje nominal. En carga, que suele estar entre 1 y 4 voltios por elemento,
dependiendo de la tecnología de fabricación de la batería.
La unidad básica de una batería es la celda. Una celda funciona en
base a un proceso de reacciones químicas de oxidación y reducción.
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-9
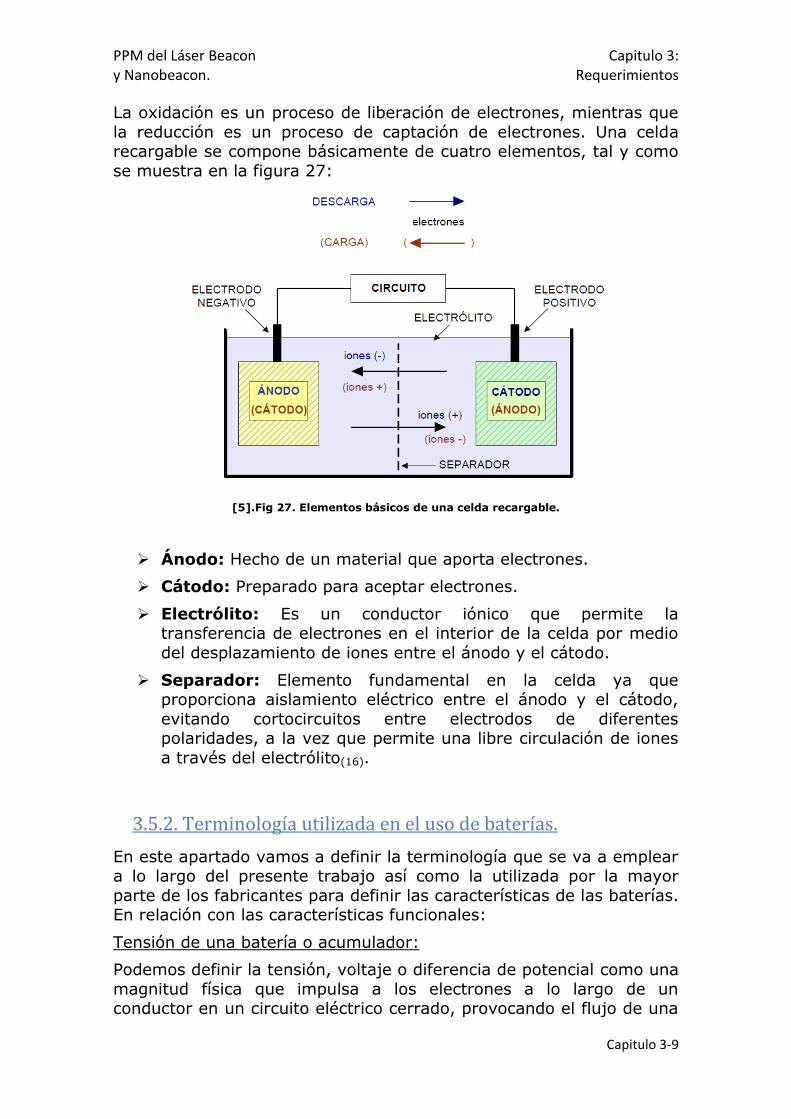
La oxidación es un proceso de liberación de electrones, mientras que
la reducción es un proceso de captación de electrones. Una celda recargable se compone básicamente de cuatro elementos, tal y como
se muestra en la figura 27:
[5].Fig 27. Elementos básicos de una celda recargable.
Ánodo: Hecho de un material que aporta electrones.
Cátodo: Preparado para aceptar electrones.
Electrólito: Es un conductor iónico que permite la transferencia de electrones en el interior de la celda por medio
del desplazamiento de iones entre el ánodo y el cátodo.
Separador: Elemento fundamental en la celda ya que proporciona aislamiento eléctrico entre el ánodo y el cátodo,
evitando cortocircuitos entre electrodos de diferentes polaridades, a la vez que permite una libre circulación de iones
a través del electrólito(16).
3.5.2. Terminología utilizada en el uso de baterías.
En este apartado vamos a definir la terminología que se va a emplear a lo largo del presente trabajo así como la utilizada por la mayor
parte de los fabricantes para definir las características de las baterías. En relación con las características funcionales:
Tensión de una batería o acumulador:
Podemos definir la tensión, voltaje o diferencia de potencial como una
magnitud física que impulsa a los electrones a lo largo de un conductor en un circuito eléctrico cerrado, provocando el flujo de una
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-10
corriente eléctrica. La tensión que una batería tiene en sus terminales
cuando no se cierra un circuito a través de ellos se denomina “tensión de vacío”. Su valor depende de la naturaleza de los electrodos y del
electrólito, de la concentración de éste último, del estado de carga de la batería y de la temperatura de funcionamiento.
Capacidad de una batería o acumulador:
La capacidad de una batería es la cantidad de electricidad, medida en
amperios-hora (Ah), que puede suministrar o aceptar una batería. El valor de la capacidad de una batería (C) se calcula como la integral
de la corriente a lo largo de un determinado periodo de tiempo, véase la ecuación X.
La ecuación X es de aplicación general, es una definición básica de la capacidad. Existen diferentes definiciones dependiendo de las
condiciones bajo las cuales se realiza la medida de capacidad. Los
más utilizados son:
Capacidad nominal: Capacidad que puede entregar una batería desde plena carga hasta alcanzar una tensión en descarga
determinada, a una temperatura ambiente fijada y utilizando una razón de descarga específica.
Capacidad real: Capacidad que puede entregar una batería desde su estado de plena carga y en condiciones de funcionamiento
diferentes a las establecidas por el fabricante para definir la capacidad nominal de la batería.
Capacidad retenida: Capacidad conservada por la batería después de un periodo de reposo o inactividad.
Capacidad disponible: Capacidad que puede entregar una batería hasta alcanzar una tensión de finalización de descarga no
normalizada que viene fijada por una aplicación especifica.
Otros términos utilizados por los fabricantes de este tipo de
dispositivos de almacenamiento eléctrico, que considero que son
importantes para poder conocer las características técnicas de una batería, y así poder hacer una elección correcta ajustándonos a
nuestras necesidades son:
Profundidad de descarga: Relación entre la capacidad en
amperios-horas (Ah) entregada por una batería durante su descarga y la capacidad nominal de la misma. Por ejemplo, una
profundidad de descarga del 80 por ciento en una batería con capacidad nominal de 100 Ah indica que se han descargado 80 Ah
y solo restan por descargar 20 Ah.
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-11
Índice C: Es la razón de carga o de descarga expresada en
amperios y numéricamente proporcional a la capacidad nominal de la batería en amperios-hora.
Autodescarga: Pérdida de capacidad de una batería cuando se mantiene en circuito abierto.
Carga Lenta: Proceso de carga mediante el cual se restablece la capacidad que ha sido descargada de una batería en periodos de
tiempo largos, 10 horas o más.
Carga Rápida: Proceso acelerado de carga mediante el cual se
restablece la capacidad que ha sido descargada de la batería. En este caso suelen utilizarse razones de carga que permiten que la
batería alcance su estado de plena carga en tiempos inferiores a las 3 horas.
Sobrecarga: Proceso que tiene lugar cuando se continúa la
aplicación de carga una batería después que se pierde la eficiencia de las reacciones electroquímicas.
Densidad de Energía: Energía que puede almacenar una batería por unidad volumen (Wh/l).
Densidad de Potencia: Potencia que puede entregar una batería por unidad volumen (W/l).
Energía Específica: Energía que puede almacenar una batería por unidad de peso (Wh/kg).
Potencia Específica: Potencia que puede entregar una batería por unidad de peso (W/kg).
Vida útil: Tiempo que la batería puede mantenerse en servicio al no haberse degradado sus características hasta el punto de hacer
decrecer sus prestaciones por debajo de unos límites predeterminados. En el caso de baterías recargables este tiempo
está relacionado con el número de meses o años de
funcionamiento de la batería (en el caso de baterías que funcionan en régimen estacionario) o bien el número de ciclos de carga-
descarga al que se halla sometido la batería (en baterías que funcionan bajo regímenes cíclicos de carga-descarga).
3.5.3. El efecto Memoria.
Este efecto está relacionado con la forma en la que se realiza la descarga, ya que la batería no siempre se descarga completamente
antes de volverla a cargar. Por ejemplo, hay muchos dispositivos que se ponen automáticamente a cargar antes de estar totalmente
descargados. Debido a esto se pueden producir descargas parciales de forma repetida causando una perdida transitoria de capacidad
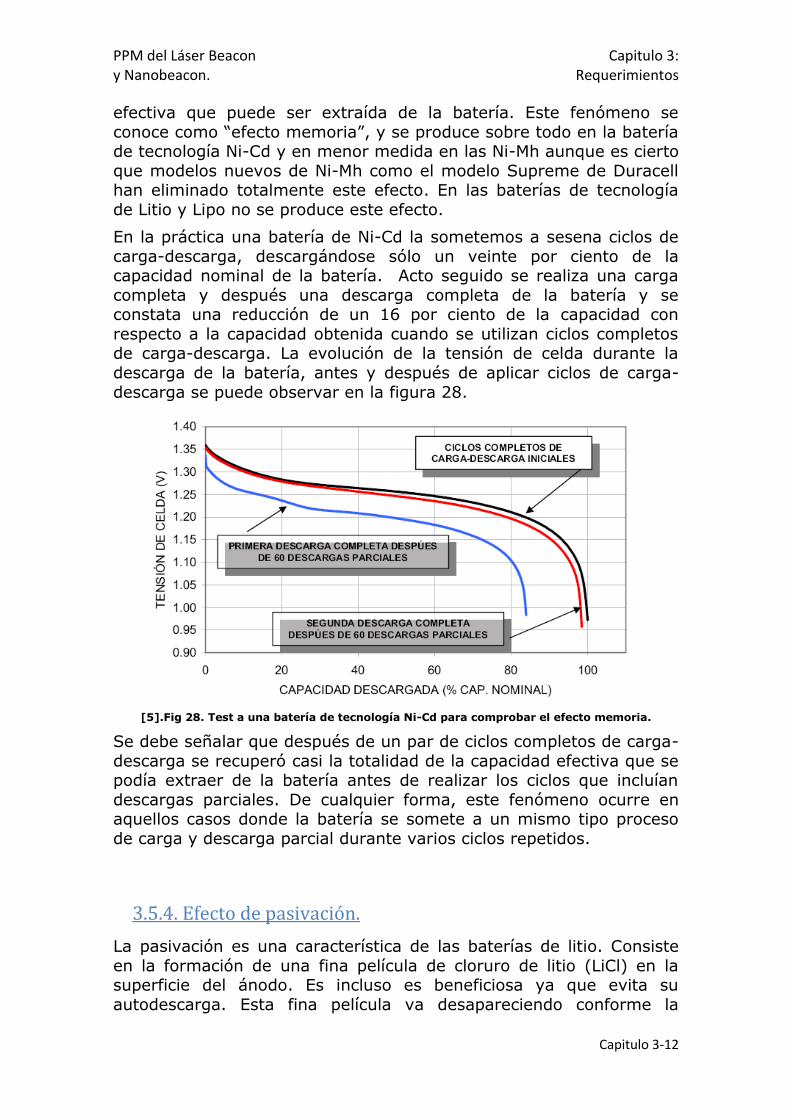
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-12
efectiva que puede ser extraída de la batería. Este fenómeno se
conoce como “efecto memoria”, y se produce sobre todo en la batería de tecnología Ni-Cd y en menor medida en las Ni-Mh aunque es cierto
que modelos nuevos de Ni-Mh como el modelo Supreme de Duracell han eliminado totalmente este efecto. En las baterías de tecnología
de Litio y Lipo no se produce este efecto.
En la práctica una batería de Ni-Cd la sometemos a sesena ciclos de
carga-descarga, descargándose sólo un veinte por ciento de la capacidad nominal de la batería. Acto seguido se realiza una carga
completa y después una descarga completa de la batería y se constata una reducción de un 16 por ciento de la capacidad con
respecto a la capacidad obtenida cuando se utilizan ciclos completos de carga-descarga. La evolución de la tensión de celda durante la
descarga de la batería, antes y después de aplicar ciclos de carga-
descarga se puede observar en la figura 28.
[5].Fig 28. Test a una batería de tecnología Ni-Cd para comprobar el efecto memoria.
Se debe señalar que después de un par de ciclos completos de carga-
descarga se recuperó casi la totalidad de la capacidad efectiva que se podía extraer de la batería antes de realizar los ciclos que incluían
descargas parciales. De cualquier forma, este fenómeno ocurre en aquellos casos donde la batería se somete a un mismo tipo proceso
de carga y descarga parcial durante varios ciclos repetidos.
3.5.4. Efecto de pasivación.
La pasivación es una característica de las baterías de litio. Consiste
en la formación de una fina película de cloruro de litio (LiCl) en la superficie del ánodo. Es incluso es beneficiosa ya que evita su
autodescarga. Esta fina película va desapareciendo conforme la
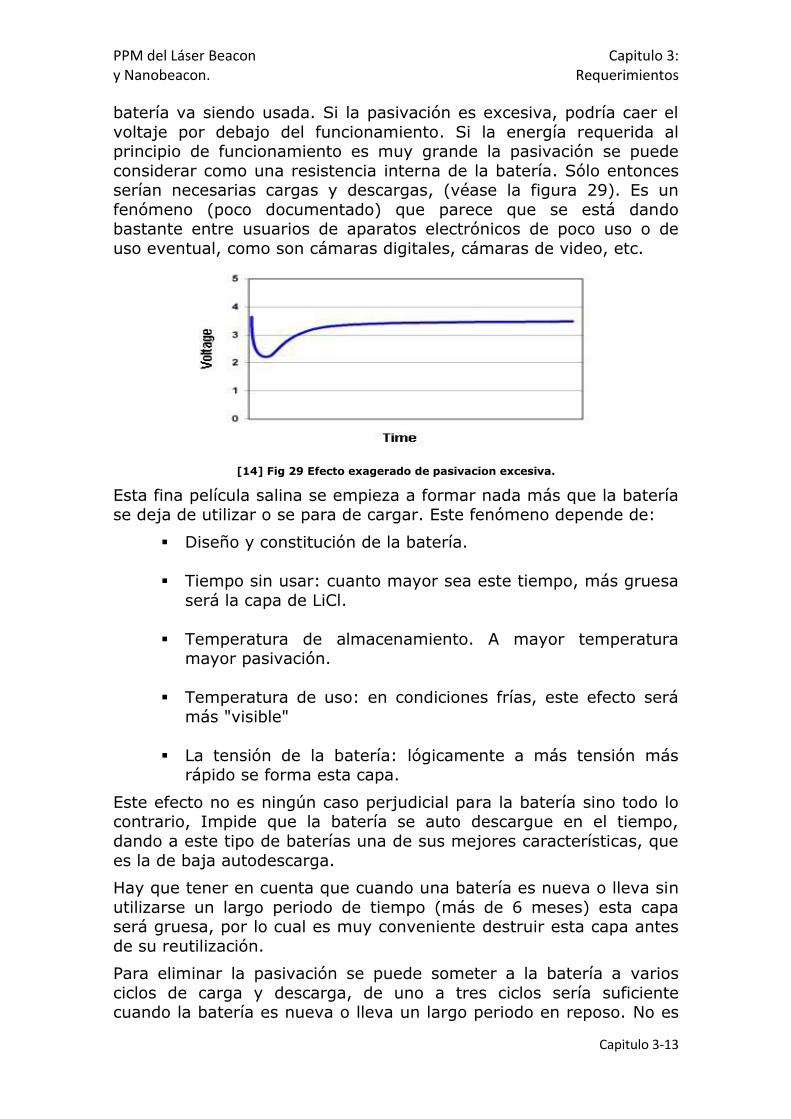
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-13
batería va siendo usada. Si la pasivación es excesiva, podría caer el
voltaje por debajo del funcionamiento. Si la energía requerida al principio de funcionamiento es muy grande la pasivación se puede
considerar como una resistencia interna de la batería. Sólo entonces serían necesarias cargas y descargas, (véase la figura 29). Es un
fenómeno (poco documentado) que parece que se está dando bastante entre usuarios de aparatos electrónicos de poco uso o de
uso eventual, como son cámaras digitales, cámaras de video, etc.
[14] Fig 29 Efecto exagerado de pasivacion excesiva.
Esta fina película salina se empieza a formar nada más que la batería se deja de utilizar o se para de cargar. Este fenómeno depende de:
Diseño y constitución de la batería.
Tiempo sin usar: cuanto mayor sea este tiempo, más gruesa
será la capa de LiCl.
Temperatura de almacenamiento. A mayor temperatura mayor pasivación.
Temperatura de uso: en condiciones frías, este efecto será
más "visible"
La tensión de la batería: lógicamente a más tensión más rápido se forma esta capa.
Este efecto no es ningún caso perjudicial para la batería sino todo lo contrario, Impide que la batería se auto descargue en el tiempo,
dando a este tipo de baterías una de sus mejores características, que
es la de baja autodescarga.
Hay que tener en cuenta que cuando una batería es nueva o lleva sin
utilizarse un largo periodo de tiempo (más de 6 meses) esta capa será gruesa, por lo cual es muy conveniente destruir esta capa antes
de su reutilización.
Para eliminar la pasivación se puede someter a la batería a varios
ciclos de carga y descarga, de uno a tres ciclos sería suficiente cuando la batería es nueva o lleva un largo periodo en reposo. No es
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-14
necesario que estos ciclos sean completos. Sólo será necesario hacer
estos ciclos si la batería va a ser utilizada a sus máximas prestaciones.
Como observaciones finales sobre la pasivación hay que destacar que no se debe confundir este fenómeno con el llamado "efecto memoria"
de las baterías de Ni-Cd o Ni-mh.
3.5.5. Equilibrado de baterías.
Como es bien sabido cualquier batería de más de 1 elemento se
desequilibra, independientemente del tipo de batería que sea. Esto ocurre debido a diferentes causas pero la principal es la diferencia
entre los elementos de un mismo pack. Es imposible que todos los electos de un pack sean completamente iguales y/o que respondan
de igual manera al paso del tiempo y uso.
Esto en la mayor parte de baterías (Ni-Cd, Ni-MH, Plomo) no supone
un gran problema ya que en cada carga se auto equilibran siempre y cuando el desequilibrio no sea muy grande. Este equilibrado se
produce cuando la batería se sobrecarga ligeramente, es muy fácil darse cuenta de ello con packs de baterías de Ni-Cd o Ni-MH en los
que si uno toca el pack al finalizar la carga notara que algunos
elementos terminan más calientes que otros. Aquellos que han terminado más calientes es que se han cargado antes (tienen una
capacidad menor) y han disipado su sobrecarga en forma de calor mientras que los demás elementos del pack (con mayor capacidad)
han terminado de cargarse. En cambio en las baterías con base química de Litio esto no es posible realizarlo de esta manera, ya que
la sobrecarga las daña y supone un gran riesgo para el usuario.
Esta es la característica más importante a tener en cuenta. Si se
trabaja con baterías de litio, se tendrá que instalar circuitos que corten la carga cuando esta haya terminado, ya que podrían dañarse
seriamente las baterías, o incluso algún dispositivo que se encuentre cerca de las baterías.
3.5.6. Comparativa de tecnologías de fabricación de baterías.
El desarrollo en los últimos años de nuevas aplicaciones (vehículos eléctricos, sistemas fotovoltaicos, sistemas de alimentación
ininterrumpida, etc.) han propiciado el surgimiento y desarrollo de nuevas tecnologías de baterías, cada vez más eficientes, fiables y con
tecnologías más económicas. Éstas son algunas de las tecnologías más utilizadas, pues existen innumerables combinaciones químicas
que se pueden usar para almacenar energía.
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-15
Antes de realizar un análisis de las tecnologías de baterías más
utilizadas en aplicaciones cíclicas que requieren baterías de media y gran capacidad, se realizara un repaso de las características que se
pueden considerar más importantes a la hora de seleccionar una batería para la alimentación del Láser Beacon.
Las principales características a la hora de elegir una batería son:
Alta densidad de energía y alta energía específica para lograr sistemas de dimensiones más reducidas y de menor peso.
Alta potencia específica y alta densidad de potencia para
asegurar picos de corrientes altos durante la descarga.
Alta eficiencia energética para lograr un uso económico de la
energía suministrada por la fuente primaria.
Baja razón de autodescarga para minimizar las pérdidas de energía durante los períodos de inactividad.
Larga vida útil para compensar los costes iniciales.
Independencia de las condiciones ambientales que posibiliten
un buen comportamiento ante variaciones climáticas extremas.
Diseño robusto, preparado para resistir abusos tanto
eléctricos (sobrecargas o sobredescargas) como mecánicos (vibraciones, golpes, etc.).
Diseño libre de elementos tóxicos contaminantes y respetuosos con el medio ambiente.
Bajo mantenimiento para reducir costes.
Bajo coste para propiciar una mejor aceptación del
consumidor.
En la selección del tipo de batería no siempre se van a poder cumplir
todos estos requisitos aquí nombrados. Lo importante es encontrar un equilibrio entre las características más relevantes para cada caso,
como por ejemplo coste, mantenimiento y vida útil, siempre dependiendo de las prestaciones que necesitemos cubrir en cada
caso.
Ahora que se ha explicado que es una batería o un acumulador, se va
a pasar a realizar un análisis de cada una de las tecnologías que se han estudiado para la alimentación del Láser Beacon, se han escogido
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-16
estos cinco tipos de baterías aún sabiendo que debido al desarrollo en
los últimos años de nuevas aplicaciones han propiciado el surgimiento y desarrollo de nuevas tecnologías de baterías.
Para la realización de este proyecto se ha considerado que estos cinco tipos de baterías se adaptarían mejor a nuestros requerimientos,
debido a sus especificaciones técnicas, tamaño y costes.
Baterías de iones de litio (Li-ion).
Baterías de níquel-cadmio (Ni-Cd).
Baterías de níquel-hidruro metálico (Ni-MH).
Baterías de polímero de litio (LiPo).
Condensador de alta capacidad.
3.5.6.1. Baterías de iones de litio.
La batería de Li-Ion es de bajo mantenimiento, una ventaja que ningún otro químico puede ofrecer. Además de la alta densidad de
energía y el bajo peso, la auto descarga es menor a la mitad de la que sufren las baterías de Ni-Cd y Ni-MH.
Las baterías de ión litio están relacionadas con una reducción del peso de los dispositivos por unidad. Las baterías de ión litio son más
ligeras que sus equivalentes de níquel cadmio o de níquel hidruro. Y
es que los electrodos de las baterías de ión litio de este metal y de carbono son mucho más ligeros. Además, el litio es un metal muy
reactivo. Existe una gran cantidad de energía potencial almacenada en sus enlaces atómicos, mucha cantidad de energía en muy poco
espacio.
Mientras que una batería de ión litio es capaz de almacenar del orden
de ciento cincuenta vatios hora de electricidad por kilogramo de peso de la batería, una pila ordinaria de metal de níquel hidruro sólo llega
a acoger cien vatios hora para la misma relación de peso, aunque la configuración más habitual de estas últimas baterías sólo
proporcionan entre sesenta y setenta vatios. Menos de la mitad de capacidad de una batería de ión litio.
[19]. Fig 30. Batería de Litio.

PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-17
Un problema que afecta a las baterías corrientes consiste en que, si
no se han descargado completamente, sólo podrán recargarse hasta un límite, la diferencia entre la energía que faltaba con cargar y la
que había antes de ponerse la batería nuevamente en carga. En la práctica, las baterías corrientes hay que descargarlas, las de ión litio
no. Su capacidad habitual suele ser de 1.5 a 2.8 Amperios, en pilas tipo AA, y su densidad de energía de 115 Wh/Kg.
Ventajas:
No hay efecto memoria y no requiere ciclos de mantenimientos para prolongar la vida de la batería.
Menor peso por unidad. Permiten llegar a altas densidades de capacidad.
No necesitan mantenimiento en todo su ciclo de vida.
Desventajas:
Las baterías de Li-Ion requieren un circuito de protección para
mantenerse operando de forma segura.
La carga debe realizarse bajo estrictos estándares.
Deterioro provocado por el paso del tiempo, aún cuando no haya sido usada
No admiten descargas completas.
Pueden sobrecalentarse hasta el punto de explotar.
Peor capacidad de trabajo en frío. Rendimiento inferior a bajas temperaturas, hasta en un 25 % menos que las Ni-Cd y Ni-MH.
3.5.6.2. Baterías de níquel-cadmio. Las baterías de níquel cadmio (que suelen abreviarse "Ni-Cd") son baterías recargables de uso doméstico e industrial. Se utilizan cada
vez menos, a favor de la Ni-MH, debido a su efecto memoria y al cadmio, que es muy contaminante. Estas baterías tienen una mayor
durabilidad (ciclos carga) que las baterías de NI-MH. Las baterías de níquel-cadmio utilizan un cátodo de hidróxido de
níquel y un ánodo de un compuesto de cadmio. El electrolito es de hidróxido de potasio. Esta configuración de materiales permite
recargar la batería una vez está agotada, para su reutilización. Sin embargo, su densidad de energía es de tan sólo cincuenta Wh/kg, lo
que hace que tengan poca capacidad. Admiten sobrecargas, se pueden seguir cargando cuando ya no admiten más carga, aunque no
la almacena. Admiten un gran rango de temperaturas de funcionamiento.
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-18
[15].Fig 31. Pila Recargable de Niquel Cadmio.
Ventajas
Mayor número de ciclos de utilización frente a las NI-MH.
Admiten sobrecargas, aun cuando estén ya cargadas.
Gran rango de temperaturas de trabajo.
Baja resistencia de salida, lo que implica que suministren alta
corriente al descargarse.
Buen rendimiento, prácticamente, toda la energía suministrada
hasta plena carga se recupera en la descarga.
Tasa de auto descarga del 20% mensual, menor que las NI-MH
(30%).
Pueden descargase manualmente mediante una resistencia.
Desventajas
Tiene efecto memoria, deben descargarse después de su uso.
Utilizan cadmio en su composición, son altamente contaminantes y elevados costes.
Baja densidad de carga en comparación con sus semejantes de NI-MH.
Su tensión en funcionamiento no debe bajar de 0.85 V. Por debajo de este valor se produce la descarga profunda, que
puede producir cambio de polaridad.
3.5.6.3. Baterías de níquel-hidruro metálico.
Una batería de níquel-hidruro metálico (Ni-MH) es un tipo de batería recargable que utiliza un ánodo de oxidróxido(17) de níquel, como la
batería de níquel cadmio, pero su cátodo es de una aleación de hidruro metálico. Esto permite eliminar el costoso y
medioambientalmente peligroso cadmio, a la vez que se beneficia de una mayor capacidad de carga, entre dos y tres veces la de una pila
de Ni-Cd del mismo tamaño y peso, y un menor efecto memoria. Por contra, presentan una mayor tasa de auto descarga que las de Ni-Cd
, un 30% mensual frente a un 20%, lo que hace que estas se
perpetúen en nichos de largos periodos entre consumo como pueden
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-19
ser los mandos a distancia, luces de emergencia, etc, mientras que
son desplazadas por las Ni-MH en el de consumo continuo.
Cada célula de Ni-MH puede proporcionar un voltaje de 1,2 voltios y
una capacidad entre 0.8 y 2.9 A/h. Su densidad de energía llega a los 80 Wh/kg. Este tipo de baterías se encuentran menos afectadas por
el llamado efecto memoria, en el que en cada recarga se limita el voltaje o la capacidad (a causa de un tiempo largo, una alta
temperatura, o una corriente elevada), imposibilitando el uso de toda su energía.
[16]. Fig 32 Imagen de una Pila de Ni-MH.
Los ciclos de carga de estas baterías oscilan entre las quinientas y setecientas cargas, algunos de sus inconvenientes son las altas
temperaturas que alcanzan en las cargas o en los usos. La densidad de energía producida por las pilas Ni-MH es el doble de la producida
por las Ni-Cd, a voltajes operativos similares, por lo que representan la nueva generación de pilas recargables que reemplazará a estas
últimas. Este tipo de baterías están libres de Cadmio por lo que se les denomina "Baterías ecológicas".
Las baterías NI-MH frente a las NI-Cd, aparentemente no tienen efectos de pérdida de capacidad por mal uso, o de formación de
dendritas(18). Como inconvenientes, no admiten una carga tan rápida como las de Ni-Cd, bajo riesgo de deteriorarlas. Es una buena norma
no cargarlas a regímenes de corriente superiores a 0,1C. Una celda RC3000 HV se podrá cargar sin problemas a 3 A. También hay que
tener en cuenta que los elementos de Ni-MH son más sensibles al
calor que las Ni-Cd. Un sobrecalentamiento puede producir gases internos y sobrepresiones que dan lugar a escapes de electrolitos y
pérdidas de estanqueidad, reduciendo la vida útil de las celdas.
Después de su uso pueden descargarse individualmente con una
resistencia hasta alcanza su valor nominal pero no conviene descargarlas indefinidamente.
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-20
Ventajas.
Bajo efecto memoria.
No utilizan Cadmio, menor coste económico y medioambiental.
Mayor densidad de energía frente a Ni-Cd.
Permiten descargas individuales mediante una resistencia.
No tienen efectos de pérdida de capacidad por mal uso como
con las NI-Cd.
Desventajas.
Carga más lenta que las NI-Cd, al tener limitación de corriente
de carga, aproximadamente el 20% de su capacidad total.
Mayor sensibilidad a las temperaturas que las Ni-Cd.
Tasa de auto descarga es de 30% mensual, 10% mas que las
Ni-Cd.
3.5.6.4. Baterías de polímero de litio.
Son una variación de las baterías de iones de litio (Li-ion). Sus
características son muy similares pero permiten una mayor densidad de energía así como una tasa de descarga bastante superior. Estas
baterías tienen un tamaño más reducido respecto a las de otros
componentes. Su tamaño y peso las hace muy útiles para equipos pequeños que requieran potencia y duración como manos libres
bluetooth y aeromodelismo.
Un solo elemento de Ni-Cd o Ni-MH tiene un voltaje de 1,2 V. Un
elemento de Lipo tiene un voltaje de 3,7V, por lo que un elemento de Lipo equivale aproximadamente a 3 elementos de Ni-Cd o Ni-MH
conectados en serie.
Las baterías de polímero de Litio se deben cargar como máximo a
una intensidad de 1C y recomendable entre 0,2 y 0,7C.
[17].Fig 33. Batería LiPo de 9.6v

PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-21
Los últimos avances en esta tecnología de baterías de polímero de
Litio permiten cargas a mayor intensidad de 1C pero es a expensas de reducir la vida útil del pack. Las baterías de Polímero de Litio no
tienen efecto memoria por lo que no es necesario ni beneficioso descargarlas antes de recargarlas.
Ventajas.
No tienen efecto memoria.
Más capacidad para el mismo peso (aprox. 20-35%).
Muy baja resistencia interna en alta temperatura, lo cual hace
que mantengan muy alto el voltaje durante la descarga dando
así mayor potencia durante su uso.
Son capaces de descargar más del 90% de su capacidad
nominal.
Desventajas.
Limitación de corriente de carga siempre inferior a 1C.
Las baterías de polímero de litio no deben exceder 60ºC/140ºF.
Se deben almacenar siempre a media carga, nunca totalmente
cargadas ni descargadas.
No se pueden descargar los elementos por debajo de 3v en un
1 pack, o 6v para un pack 2S.
Es necesario utilizar un regulador con programación de corte
para no superar el límite de descarga, ya que produciría daños irreparables en los elementos.
3.5.6.5. Condensador de alta capacidad
Actualmente los súper condensadores comerciales son de base de carbono con un electrolito de metal alcalino o alcalinotérreo. En la
actualidad los súper condensadores se utilizan más para diseño de sistemas de potencia para la estabilización de voltaje, por lo que
encontramos super condensadores desde mil quinientos hasta tres
mil faradios, con un peso que va del kilo y medio a los tres kilogramos.
Aunque los condensadores de alta capacidad no sean acumuladores electroquímicos en sentido estricto, en la actualidad se están
consiguiendo capacidades de varios faradios lo suficientemente grandes como para que se los pueda utilizar como baterías cuando
las potencias a suministrar sean pequeñas, en relación a su capacidad de almacenamiento de energía. Debido a esto se suelen utilizar en
diversas aplicaciones, especialmente en suavización de energía y los dispositivos de carga momentánea. Dentro de sus primeros usos cabe

PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-22
destacar como fuente de energía para el arranque de motores que
necesitan un gran suministro de energía instantáneo.
Más recientemente se han convertido en un tema de gran interés en
la llamada “Energía verde”, pues su capacidad de absorber energía rápidamente los hace particularmente adecuados para aplicaciones de
freno regenerativo, mientras que las pilas, por otro lado, tienen dificultades en esta tarea debido su lenta velocidad de carga.
Un condensador de alta capacidad tiene un gran rendimiento (el 98% de la carga se devuelve), almacena mucha energía en relación a su
peso 4 Wh/kg, aunque no tanto como una batería, no presentan efecto memoria y tienen una gran capacidad de carga y descarga
rápida 5 kW/kg. Los súper condensadores prometen llenar la brecha entre los capacitores y baterías.
[18]. Fig 34. Súper Condensadores electrolíticos de carbono de doble capa.
Aún sabiendo que funcionan como acumuladores se les suele llamar
"condensadores", ya que condensan o almacenan la corriente eléctrica aunque ésta fluctúe(19) en el circuito.
Los súper condensadores actualmente se clasifican de acuerdo con los materiales de los que se encuentran elaborados. Actualmente se
distinguen en principalmente cuatro tipos:
Súper condensadores electrolíticos de carbono de doble capa.
Súper condensadores no electrolíticos de carbono de doble capa.
Super condensadores acuosos de óxido de doble capa con pseudocapacitancia(20) redox.
Súper condensadores de polímeros(21) conductores
Sobre el papel, los condensadores son muy superiores a las baterías
convencionales, son baratos, no contienen elementos tóxicos o inflamables y su vida útil es prácticamente infinita, pero su gran
inconveniente es su escasa capacidad de almacenamiento, muy inferior en comparación con la capacidad de cualquier batería.
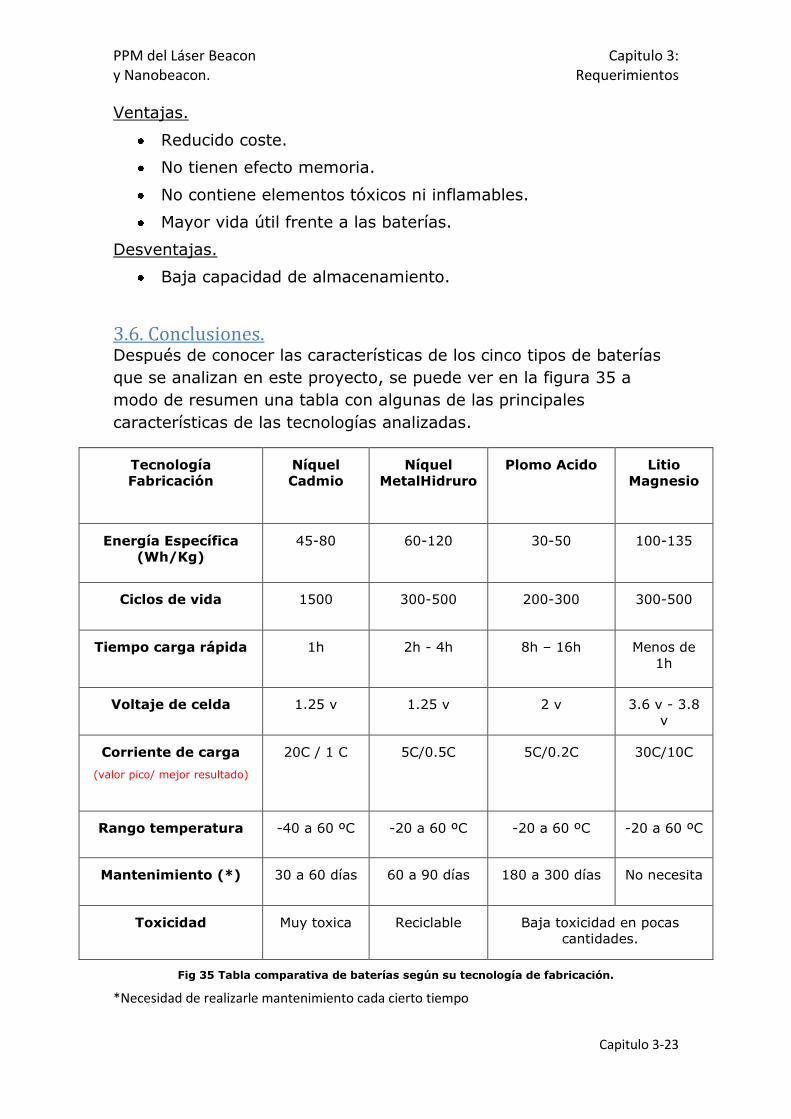
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-23
Ventajas.
Reducido coste.
No tienen efecto memoria.
No contiene elementos tóxicos ni inflamables.
Mayor vida útil frente a las baterías.
Desventajas.
Baja capacidad de almacenamiento.
3.6. Conclusiones. Después de conocer las características de los cinco tipos de baterías
que se analizan en este proyecto, se puede ver en la figura 35 a
modo de resumen una tabla con algunas de las principales
características de las tecnologías analizadas.
Tecnología
Fabricación
Níquel
Cadmio
Níquel
MetalHidruro
Plomo Acido Litio
Magnesio
Energía Específica
(Wh/Kg)
45-80 60-120 30-50 100-135
Ciclos de vida 1500 300-500 200-300 300-500
Tiempo carga rápida 1h 2h - 4h 8h – 16h Menos de
1h
Voltaje de celda 1.25 v 1.25 v 2 v 3.6 v - 3.8
v
Corriente de carga
(valor pico/ mejor resultado)
20C / 1 C 5C/0.5C 5C/0.2C 30C/10C
Rango temperatura -40 a 60 ºC -20 a 60 ºC -20 a 60 ºC -20 a 60 ºC
Mantenimiento (*) 30 a 60 días 60 a 90 días 180 a 300 días No necesita
Toxicidad
Muy toxica Reciclable Baja toxicidad en pocas
cantidades.
Fig 35 Tabla comparativa de baterías según su tecnología de fabricación.
*Necesidad de realizarle mantenimiento cada cierto tiempo
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-24
Para la elección del tipo de batería se ha buscado obtener un
equilibrio entre prestaciones, coste, mantenimiento y vida útil. Se ha intentado sobre todo ajustarse al material disponible, teniendo en
cuenta que en una primera fase del proyecto KM3NeT, denominada Fase de Preproducción o PPM, únicamente se va a instalar una línea
de detección durante un periodo corto de tiempo. Por eso mismo se tendrá en cuenta que la batería que se elija únicamente va estar
funcionando unos pocos meses.
Por lo tanto se ha decidido utilizar una batería del tipo NI-MH, he
elegido este tipo de batería por los siguientes motivos:
Aunque teniendo menor densidad de carga que las Li-On y Li-Po, las Ni-MH no necesitan un circuito de protección para mantenerse
operando de forma segura como es el caso de las Li-On, de esta
manera reducimos costes y simplificamos el circuito. Toleran mejor seguir conectadas cargándose aun cuando están
cargadas completamente y no necesitan ser descargadas o cargadas a media carga antes de almacenarlas como ocurre con
las de tecnología Li-Po. Son más económicas y ecológicas que las Ni-Cd ya que no tienen
cadmio altamente contaminante. Podremos aprovechar una desventaja de las Ni-MH como es la
limitación de corriente de carga inferior al 10% de la carga, como una ventaja ya que necesitamos una batería que se carge a una
corriente no superior a 150 mili Amperios, ya que solo disponemos de 12v@200mA de alimentación de entrada.
Debido a esto se ha elegido que la batería sea de Ni-MH y esté
formada por pilas recargables de la marca Duracell del tipo Supreme,
sus principales características son:
Tipo de Batería: Ni-MH 2450 mAh, AA. Capacidad de la Batería: 2450 mAh.
Tensión de la Batería: 1,2 V. Tecnología de fabricación: Níquel - hidruro de metal.
Diámetro Externo: 14,5 mm. Altura Externa: 50,5 mm.
Peso: 28 gr.
Para poder suministrar suficiente potencia al Láser la batería tendrá que estar formada por al menos 10 elementos o celdas de 1,2 voltios
cada uno. Cada celda tiene un valor nominal en estado descargado de 1,2 voltios, conforme se va cargando, este valor de tensión va
incrementándose llegando a alcanzar un valor en estado completamente cargado de alrededor del 120 % del valor nominal en
estado descargado. Este incremento se puede ver en la figura 36.

PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-25
[5] Fig 36. Curva de carga de una celda de Níquel Metal Hidruro.
Por lo tanto la batería formada por diez celdas tendrá una tensión nominal en estado descargado de 12 voltios y en estado cargado de
14,4 voltios.
Según las características del fabricante este tipo de baterías
necesitan ser cargadas a una corriente inferior al 10% de su capacidad, es decir si mi batería tiene una capacidad de 2450 mA, no
debe cargarse con una corriente superior a 245 mA, de este modo
conseguiremos optimizar el rendimiento de la batería, esto en principio no es ningún problema, ya que la entrada es de 200 mA.
Otro factor muy importante en la optimización de la capacidad nominal de este tipo de baterías es que la temperatura ambiente que
se debe mantener dentro del margen [-20…60] ºC, porque con una temperatura extrema la capacidad de la batería será menor.
En la siguiente tabla se puede ver la corriente mínima que hay que suministrar a la batería para realizar una carga completa dentro del
tiempo máximo. Por lo tanto ya están acotados los márgenes de corriente de carga de nuestra batería que estarán comprendidos
[34…..245] mA/h.
Capacidad de la Batería: 2450 mAh. Tiempo disponible para una carga completa: 72 horas.
Corriente mínima para realizar una carga: 34,027 mAh.
Corriente máxima para realizar una carga: 245 mAh.
A continuación se puede ver una gráfica proporcionada en la hoja de datos del fabricante, en la cuál nos indica para este tipo de pila
recargable el tiempo de descarga varía en función de la tensión que le
demandemos a la batería y en función de la corriente de descarga. Para este caso se utilizará una batería por 10 celdas de este tipo
unidas en serie, vemos que para la corriente que le vamos a demandar a la batería, inferior al 1.5 A, proporcionará un tiempo de
funcionamiento muy superior a los veinte minutos exigidos por el

PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-26
consorcio KM3NeT para que se realice el proceso de calibración del
telescopio de neutrinos mediante la utilización del Láser Beacon.
[19].Fig 37 .Grafico V/h para descarga normal.
Capitulo 4-1
El objetivo de este capítulo es dar a conocer el hardware empleado en
la elaboración de este proyecto. Diferenciaremos tres partes, el hardware de la tarjeta de potencia que alimentara al láser Beacon, el
hardware de control que controlará al láser Beacon y hardware de los
Nanobeacon.
4.1. Tarjeta de potencia del Láser Beacon.
La tarjeta de potencia del Láser Beacon será la encargada de suministrar tanto la alimentación requerida al Láser Beacon, como de
servir de enlace entre la tarjeta de control y el Láser con el atenuador óptico. Además tendrá que proporcionar una señal cuadrada con una
frecuencia determinada de 2 KHz con una amplitud que podrá ir desde 0 hasta 20 Vpp para poder controlar el atenuador óptico.
4.1.1. Elementos de la tarjeta de potencia del láser Beacon.
Los dos principales elementos de la tarjeta de potencia son el Láser
Beacon que llevará incorporado una tarjeta controladora externa en
un recipiente cerrado para impedir interferencias y la manipulación de la misma y el atenuador óptico que se encargara de regular la
potencia emitida por el Láser Beacon.
4.1.2. El Láser Beacon.
El Láser Beacon será el elemento principal utilizado para el sistema de calibración INTER-DU, este Láser está fabricado por Microchip y su
distribuidor es Teemphotonics modelo STG-03E-1S0. Pertenece a una
gama de potencias media alta, ya que tiene una potencia media 3.5 uJ, sus características técnicas son:
Longitud de Onda 532 nm. Energía por Pulso >3 μJ.
Anchura de Pulso <400 ps. Potencia máxima >10 kW.
Frecuencia de Repetición entre [100…2000] Hz.
Rango de temperaturas [0..50] ºC Peso 270 gr.
Dimensiones 142x37x35 mm.

PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-2
[20]Fig. 38 .Imagen del Láser Beacon.
Este láser tiene una vida media de más de 10.000 horas y esta refrigerado por aire. Necesitara de una tarjeta controladora para su
funcionamiento, la tarjeta controladora será externa, fabricada también por Microchip, modelo MLC-03A-MP0. Esta tarjeta
controladora será la encargada de hacer de enlace entre la tarjeta diseñada y el Láser, tanto de la alimentación como las señales de
control.
[21] Fig 39. Imagen de la tarjeta controladora del láser Beacon modelo MLC-03A-MP0
Esta tarjeta controladora necesitará una alimentación de 12 V, las
señales de control como son el trigger y el pulso de encendido o apagado, tienen qué ser de niveles TTL. Algunas de sus
características más importantes son:
Tensión de Entrada de 12 VDC.
Corriente de limitación del diodo laser ajustable.
Regulación PID térmica dual bipolar. Refrigerador Termoeléctrico ajustable desde 0A a ±2A
Control RS232, control TTL. Eficiencia >70%.
Posibilidad de Señal de trigger del Láser Externa. Consumo Máximo 41 W.
Fusible de entrada 3.5 A. Peso 100 gr.
Dimensiones 95x107x14 mm.

PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-3
Además esta tarjeta controladora dispone de una salida de fotodiodo
para la sincronización con algunos instrumentos de medida como por ejemplo un osciloscopio que nos permita comprobar las
características reales del Láser como el jitter(22), slew-rate(23) y demás características.
Esta tarjeta controladora del Láser lleva incorporados en el frontal una serie de diodos de tipo Led. Al conectarse la alimentación se hará
un chequeo de verificación indicando en todo momento el estado de esa verificación mediante los diodos led. Esta verificación la hará
antes de permitirnos la puesta en marcha del láser. Para poder encender el láser se deberá mandar un pulso de nivel bajo de unos
500 ms de duración aproximadamente. También se tiene la opción de pulsar el pulsador de color rojo que se tiene instalado al lado de los
diodos led.
4.1.3. El Atenuador Óptico (Polarizaor).
A diferencia de otros dispositivos donde la energía emitida puede ser variada en el Láser la potencia emitida es fija. Por ello se utilizará un
atenuador óptico controlado por voltaje para poder cambiar esa intensidad de emisión del Láser.
En la figura X se pueden ver los elementos que compondrán el
atenuador Óptico.
[9]. Fig 40. Imagen ilustrativa de los elementos que formaran el Atenuador Óptico.

PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-4
Este atenuador óptico estará formado por dos elementos:
Cristal Liquido Polarizador de Meadowlark Optics, modelo LVR-100-532.
Cubo Polarizador “Beam-splitter” de Newport, modelo 05FC16PB.
Cristal Líquido Polarizador. Se trata de un cristal que en función de la tensión aplicada al polarizador reorganizara las moléculas que lo
componen dejando pasar más luz o no en función de la tensión aplicada. En la figura 40 se puede ver un ejemplo del funcionamiento
de este cristal.
Cubo Polarizador “Beam-splitter”. Este cubo Polarizador consiste
en dos prismas de ángulo recto donde uno de estos prismas es cubierto por un dieléctrico(24) de múltiples capas polarizando el Beam-
splitter. La luz entrante es divida en dos componentes directamente
polarizados, transmitiendo la luz p-polarizada y reflejando la polarizada según este orientado el Beam-Splitter reflejará o no una
de las dos señales. La razón de usar el cubo polarizador es que el cristal liquido polarizador solo puede actuar sobre una de las dos
señales que emite el Láser, de manera que al dividir la luz entrante en dos y reflejar la polarizada, la señal que no ha sido reflejada se
podrá controlar mediante el cristal liquido polarizador, aplicándole una tensión mayor o menor en función de la atenuación que se
desee, de este modo se tiene un control sobre la señal emitida por el Láser Beacon, además se consigue una mayor eficiencia en la
potencia emitida que con modelos de polarizadores lineales. El modelo de cubo polarizador usado esta optimizado para trabajar con
señales de longitudes de onda comprendidas entre 420 y 680 nm.
Este atenuador necesitará una señal cuadrada de 2 Khz de frecuencia
constante con unos valores de tensión dentro de un rango de 0 a 20
Vpp.
4.2. Tarjeta de potencia del láser Beacon.
En primer lugar se puede ver un diagrama de bloques para ver cuáles son los elementos principales de mi diseño, que señales necesitan
estos, y de que señales dispongo.
El consorcio de KM3Net nos ha informado que las señales que ponen a nuestra disposición para funcionamiento del circuito encargado del
control y alimentación del Láser Beacon es:
Señal DC de 12 V, 200 mA.
Señal de trigger externo de niveles de TTL y de frecuencia de 2 KHz.
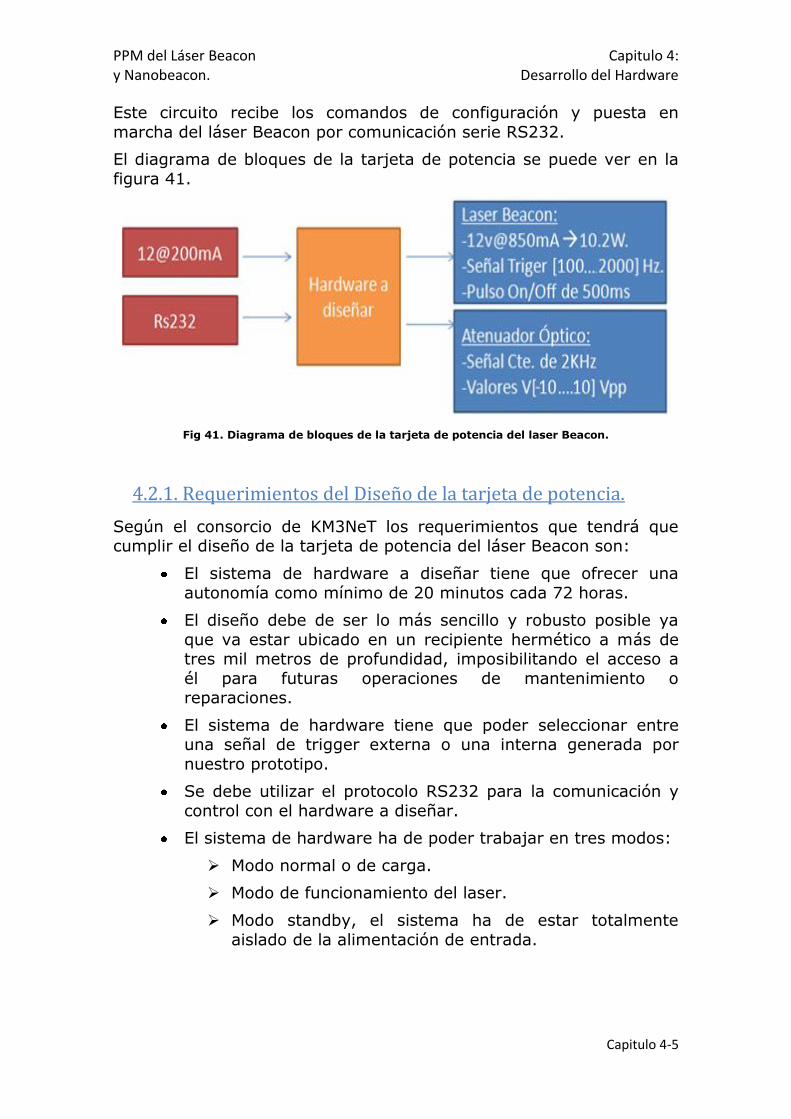
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-5
Este circuito recibe los comandos de configuración y puesta en
marcha del láser Beacon por comunicación serie RS232.
El diagrama de bloques de la tarjeta de potencia se puede ver en la
figura 41.
Fig 41. Diagrama de bloques de la tarjeta de potencia del laser Beacon.
4.2.1. Requerimientos del Diseño de la tarjeta de potencia.
Según el consorcio de KM3NeT los requerimientos que tendrá que cumplir el diseño de la tarjeta de potencia del láser Beacon son:
El sistema de hardware a diseñar tiene que ofrecer una
autonomía como mínimo de 20 minutos cada 72 horas.
El diseño debe de ser lo más sencillo y robusto posible ya
que va estar ubicado en un recipiente hermético a más de tres mil metros de profundidad, imposibilitando el acceso a
él para futuras operaciones de mantenimiento o reparaciones.
El sistema de hardware tiene que poder seleccionar entre una señal de trigger externa o una interna generada por
nuestro prototipo.
Se debe utilizar el protocolo RS232 para la comunicación y
control con el hardware a diseñar.
El sistema de hardware ha de poder trabajar en tres modos:
Modo normal o de carga.
Modo de funcionamiento del laser.
Modo standby, el sistema ha de estar totalmente
aislado de la alimentación de entrada.
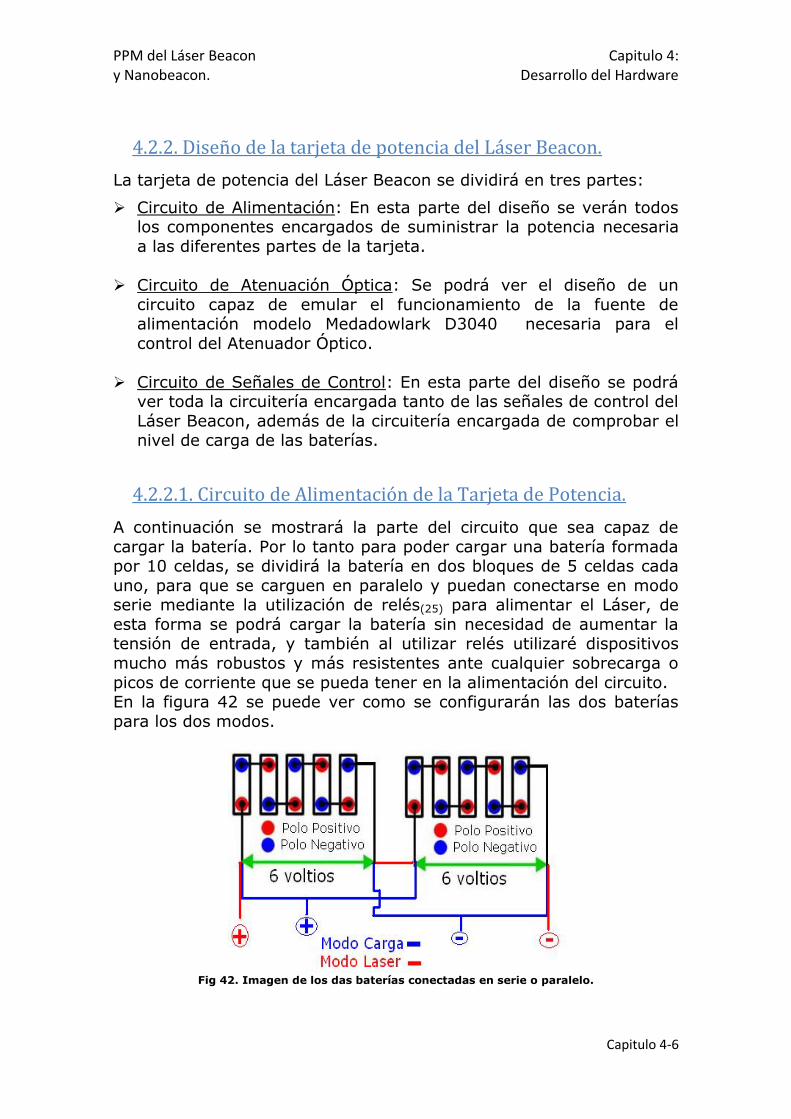
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-6
4.2.2. Diseño de la tarjeta de potencia del Láser Beacon.
La tarjeta de potencia del Láser Beacon se dividirá en tres partes:
Circuito de Alimentación: En esta parte del diseño se verán todos los componentes encargados de suministrar la potencia necesaria
a las diferentes partes de la tarjeta.
Circuito de Atenuación Óptica: Se podrá ver el diseño de un
circuito capaz de emular el funcionamiento de la fuente de alimentación modelo Medadowlark D3040 necesaria para el
control del Atenuador Óptico.
Circuito de Señales de Control: En esta parte del diseño se podrá ver toda la circuitería encargada tanto de las señales de control del
Láser Beacon, además de la circuitería encargada de comprobar el nivel de carga de las baterías.
4.2.2.1. Circuito de Alimentación de la Tarjeta de Potencia.
A continuación se mostrará la parte del circuito que sea capaz de
cargar la batería. Por lo tanto para poder cargar una batería formada por 10 celdas, se dividirá la batería en dos bloques de 5 celdas cada
uno, para que se carguen en paralelo y puedan conectarse en modo serie mediante la utilización de relés(25) para alimentar el Láser, de
esta forma se podrá cargar la batería sin necesidad de aumentar la tensión de entrada, y también al utilizar relés utilizaré dispositivos
mucho más robustos y más resistentes ante cualquier sobrecarga o
picos de corriente que se pueda tener en la alimentación del circuito. En la figura 42 se puede ver como se configurarán las dos baterías
para los dos modos.
Fig 42. Imagen de los das baterías conectadas en serie o paralelo.

PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-7
En la figura 43 se muestra el esquemático de la parte de alimentación de la tarjeta. Se dividirá en cinco bloques:
Fig 43. Esquemático de la Alimentación del Láser Beacon.
Bloque A: Esta es la parte de la alimentación de la tarjeta en la que
podemos encontrar la alimentación de entrada, el convertidor dc/dc de 12 a 5 V así como otro convertidor dc/dc de 12 a ( 12) V con
salida dual. Este convertidor solo se utilizará cuando se esté
utilizando el atenuador óptico. Por eso se ha utilizado un transistor que restringirá su uso para que sólo se conecte en ese modo.

PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-8
Bloque B: Este bloque lo forman los cuatro relés dobles modelo GS6-
2 de Omron que son los encargados de conectar las dos baterías en paralelo para la carga, en serie para la puesta en marcha del Láser y
en desconectar el circuito de la alimentación para el modo StandBy.
En la Figura 44 se puede ver la disposición de los pines y los contactos del utilizado, es un relé doble del fabricante OMROM
modelo G6S-2, este relé tiene una sola bobina y dos juegos de contactos, por lo que está reduciendo el consumo por relé a la mitad,
frente a los relés que tienen una sola bobina por cada juego de
contactos. Además el fabricante ha indicado la orientación de la bobina, ya que si no se cumple esta orientación no funcionará.
[22] Fig 44. Imagen de distribución de contactos de un relé doble de OMROM modelo G6S-2 .
Bloque C: En este bloque aparecen los dos transistores que serán los encargados de proporcionar suficiente corriente para excitar la bobina
de los relés. Además aparece una puerta lógica de tipo AND que se encarga de proteger el circuito y las baterías tomando que sólo se
pueda trabajar en los tres modos diseñados:
Modo Carga. Pin RB5=RB6= 0. Modo Laser. Pin RB5=RB6= 1.
Modo StandBy. Pin RB5=1 y RB6= 0.
Bloque D: Este bloque estará formado únicamente por el limitador
de corriente LM317T y su correspondiente resistencia calculada para limitar la corriente a 150 mA y el condensador necesario en este
limitador.
Se ha optado por utilizar un LM317T por su gran simplicidad y
versatilidad en el diseño e implementación. Además de que con tan sólo 3 componentes, el LM317T, una resistencia y un condensador
como se muestra en la figura 47 tendremos un limitador de corriente
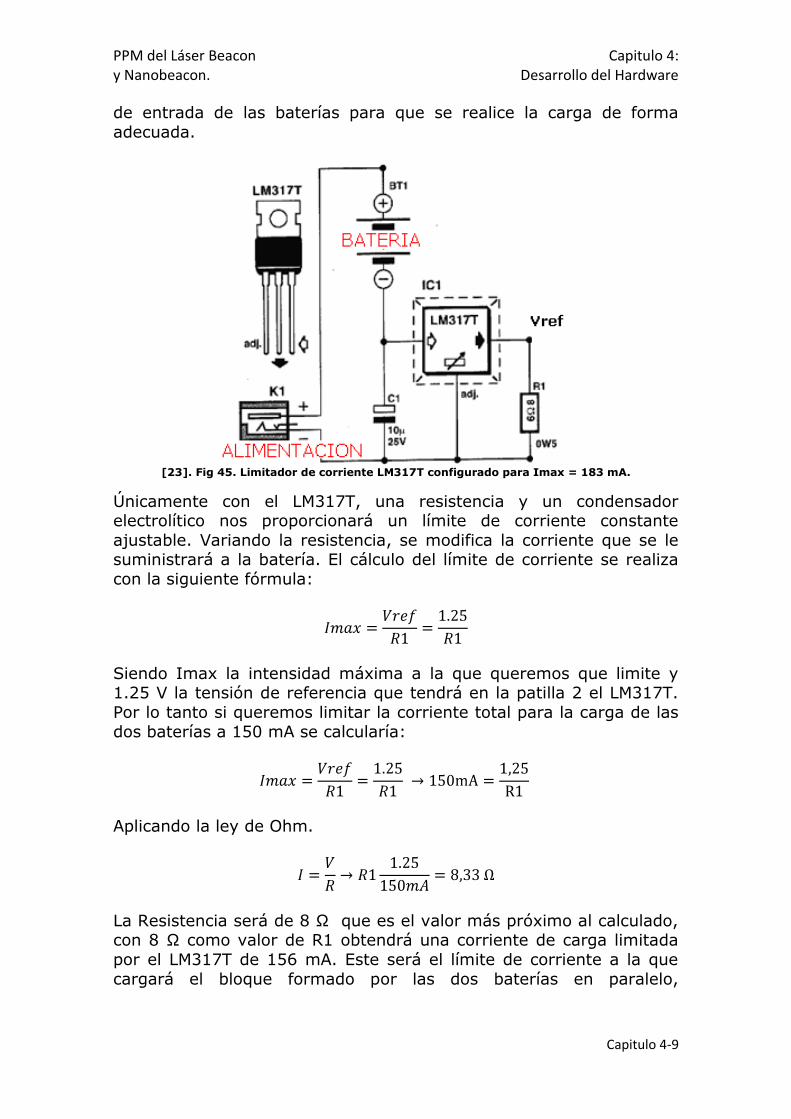
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-9
de entrada de las baterías para que se realice la carga de forma
adecuada.
[23]. Fig 45. Limitador de corriente LM317T configurado para Imax = 183 mA.
Únicamente con el LM317T, una resistencia y un condensador electrolítico nos proporcionará un límite de corriente constante
ajustable. Variando la resistencia, se modifica la corriente que se le suministrará a la batería. El cálculo del límite de corriente se realiza
con la siguiente fórmula:
Siendo Imax la intensidad máxima a la que queremos que limite y 1.25 V la tensión de referencia que tendrá en la patilla 2 el LM317T.
Por lo tanto si queremos limitar la corriente total para la carga de las
dos baterías a 150 mA se calcularía:
Aplicando la ley de Ohm.
La Resistencia será de 8 Ω que es el valor más próximo al calculado, con 8 Ω como valor de R1 obtendrá una corriente de carga limitada
por el LM317T de 156 mA. Este será el límite de corriente a la que
cargará el bloque formado por las dos baterías en paralelo,

PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-10
resultando una corriente si se reparte por igual entre las dos baterias
de 78 mA aproximadamente para cada batería.
Bloque E: En este bloque aparecen los componentes encargados de suministrar potencia al Láser Beacon. En él se pueden ver los dos
conectores donde irán las baterías, además de un convertidor dc/dc de 9 a 12 V que será el encargado de suministrar potencia al Láser.
Se ha optado por utilizar este convertidor dc/dc del fabricante TRACO POWER modelo TEN20-2412-WIN ya que, aún no siendo necesario
porque únicamente con las baterías tendría suficiente potencia, de esta forma se proporciona al Láser una protección contra posibles
fallos o cortocircuitos en la alimentación. Además se proporcionan una salida mucho más estable. Las características de este convertidor
son:
N.º de Salidas 1. Rango de Tensión de entrada [9..36] V. Potencia nominal 20W.
Tensión de salida 12V.
Corriente Máxima de Salida 1.67ª. Aislamiento de la Salida 1500VDC.
Dimensiones 25x10x51 mm.
Eficiencia 86%. Rango de Temperaturas [-40…85]ºC.
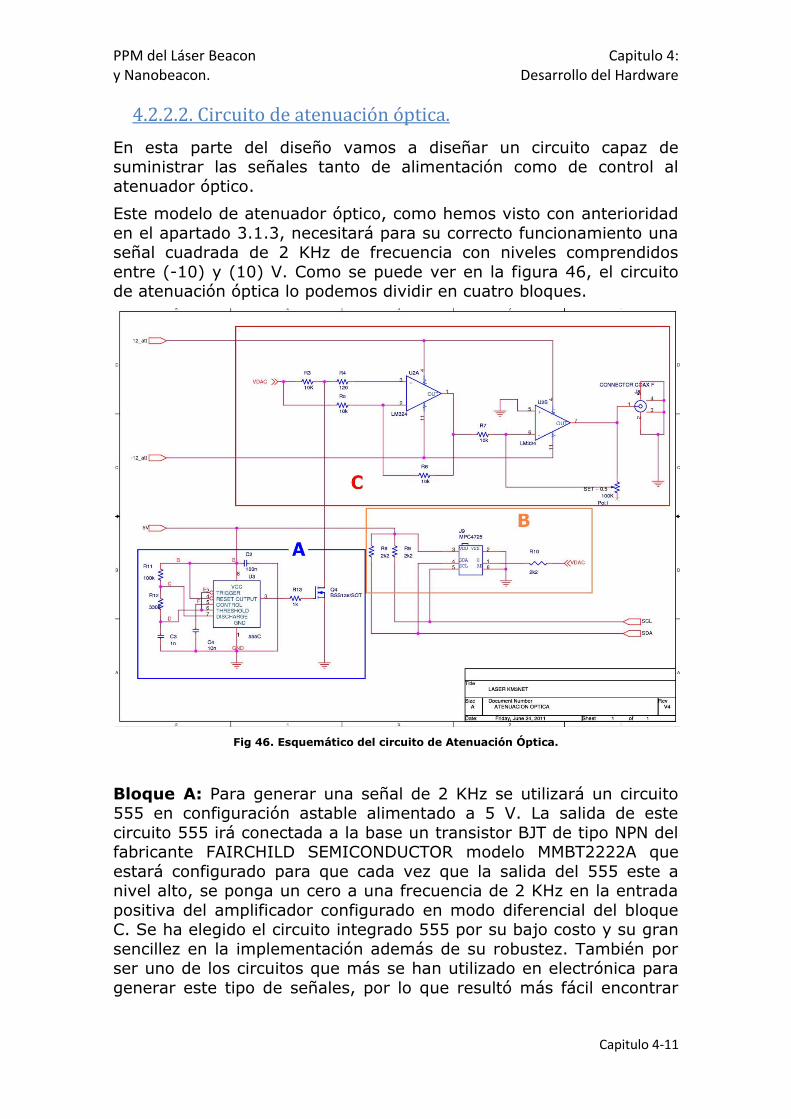
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-11
4.2.2.2. Circuito de atenuación óptica.
En esta parte del diseño vamos a diseñar un circuito capaz de suministrar las señales tanto de alimentación como de control al
atenuador óptico.
Este modelo de atenuador óptico, como hemos visto con anterioridad
en el apartado 3.1.3, necesitará para su correcto funcionamiento una señal cuadrada de 2 KHz de frecuencia con niveles comprendidos
entre (-10) y (10) V. Como se puede ver en la figura 46, el circuito de atenuación óptica lo podemos dividir en cuatro bloques.
Fig 46. Esquemático del circuito de Atenuación Óptica.
Bloque A: Para generar una señal de 2 KHz se utilizará un circuito 555 en configuración astable alimentado a 5 V. La salida de este
circuito 555 irá conectada a la base un transistor BJT de tipo NPN del fabricante FAIRCHILD SEMICONDUCTOR modelo MMBT2222A que
estará configurado para que cada vez que la salida del 555 este a nivel alto, se ponga un cero a una frecuencia de 2 KHz en la entrada
positiva del amplificador configurado en modo diferencial del bloque C. Se ha elegido el circuito integrado 555 por su bajo costo y su gran
sencillez en la implementación además de su robustez. También por ser uno de los circuitos que más se han utilizado en electrónica para
generar este tipo de señales, por lo que resultó más fácil encontrar
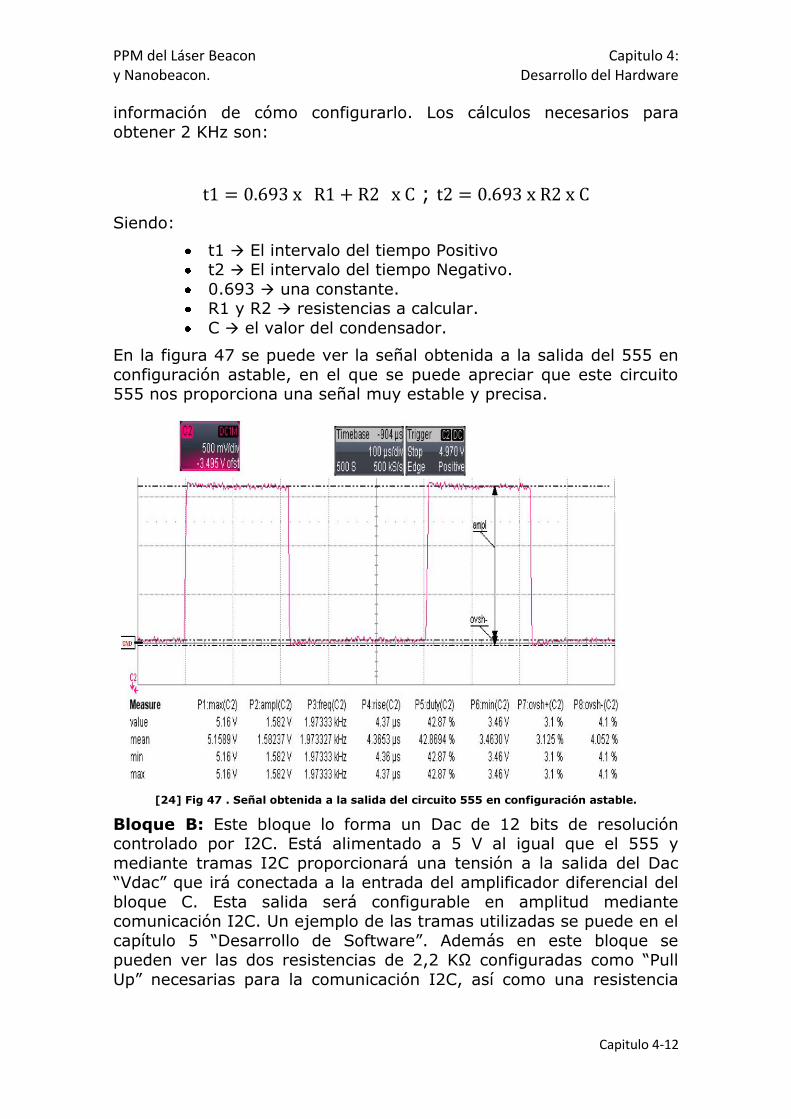
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-12
información de cómo configurarlo. Los cálculos necesarios para
obtener 2 KHz son:
;
Siendo:
t1 El intervalo del tiempo Positivo t2 El intervalo del tiempo Negativo.
0.693 una constante. R1 y R2 resistencias a calcular.
C el valor del condensador.
En la figura 47 se puede ver la señal obtenida a la salida del 555 en
configuración astable, en el que se puede apreciar que este circuito 555 nos proporciona una señal muy estable y precisa.
[24] Fig 47 . Señal obtenida a la salida del circuito 555 en configuración astable.
Bloque B: Este bloque lo forma un Dac de 12 bits de resolución controlado por I2C. Está alimentado a 5 V al igual que el 555 y
mediante tramas I2C proporcionará una tensión a la salida del Dac “Vdac” que irá conectada a la entrada del amplificador diferencial del
bloque C. Esta salida será configurable en amplitud mediante comunicación I2C. Un ejemplo de las tramas utilizadas se puede en el
capítulo 5 “Desarrollo de Software”. Además en este bloque se pueden ver las dos resistencias de 2,2 KΩ configuradas como “Pull
Up” necesarias para la comunicación I2C, así como una resistencia
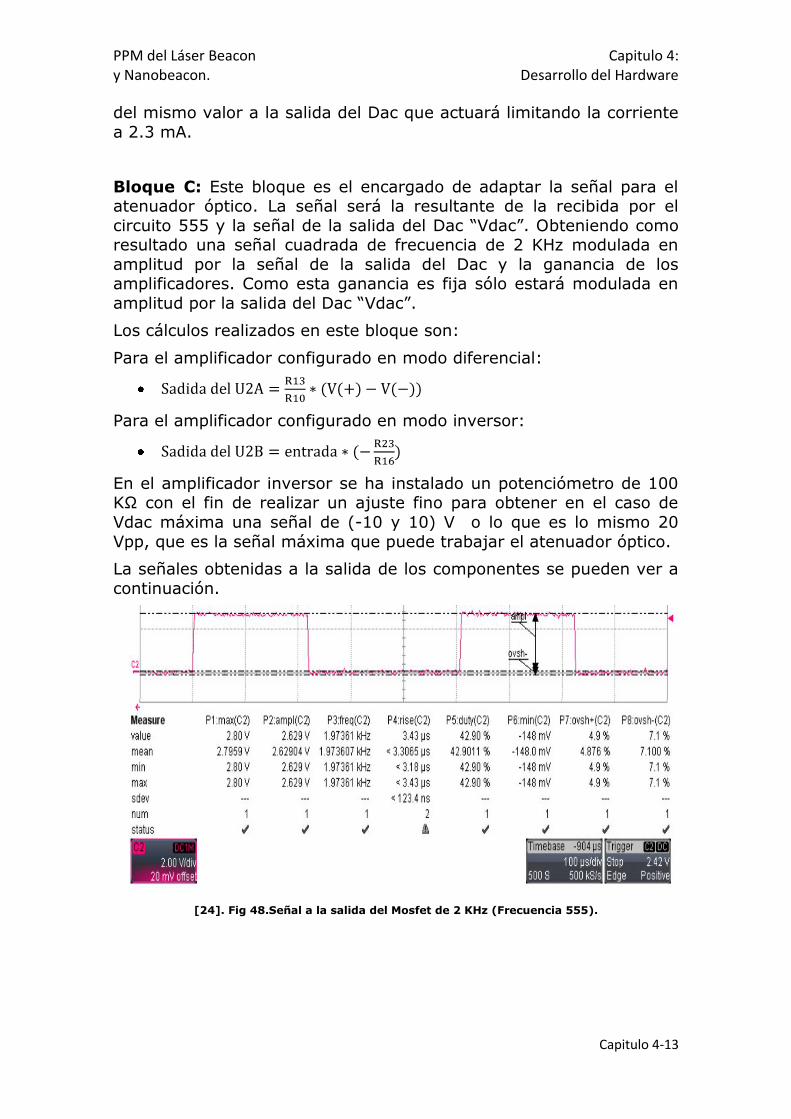
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-13
del mismo valor a la salida del Dac que actuará limitando la corriente
a 2.3 mA.
Bloque C: Este bloque es el encargado de adaptar la señal para el atenuador óptico. La señal será la resultante de la recibida por el
circuito 555 y la señal de la salida del Dac “Vdac”. Obteniendo como resultado una señal cuadrada de frecuencia de 2 KHz modulada en
amplitud por la señal de la salida del Dac y la ganancia de los amplificadores. Como esta ganancia es fija sólo estará modulada en
amplitud por la salida del Dac “Vdac”.
Los cálculos realizados en este bloque son:
Para el amplificador configurado en modo diferencial:
Para el amplificador configurado en modo inversor:
En el amplificador inversor se ha instalado un potenciómetro de 100 KΩ con el fin de realizar un ajuste fino para obtener en el caso de
Vdac máxima una señal de (-10 y 10) V o lo que es lo mismo 20
Vpp, que es la señal máxima que puede trabajar el atenuador óptico.
La señales obtenidas a la salida de los componentes se pueden ver a
continuación.
[24]. Fig 48.Señal a la salida del Mosfet de 2 KHz (Frecuencia 555).

PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-14
[24] Fig 49. Salida del amplificador configurado en modo Diferencial.
[24]Fig 50. Salida del amplificador inversor, entrada del atenuador óptico.
Como se puede ver en las figuras anteriores se obtiene la señal cuadrada de 2 KHz y 20 Vpp necesaria para el atenuador óptico. Esta
señal solo variará en amplitud dependiendo de la amplitud de Vdac que se controlará mediante tramas de comunicación I2C con el PIC.
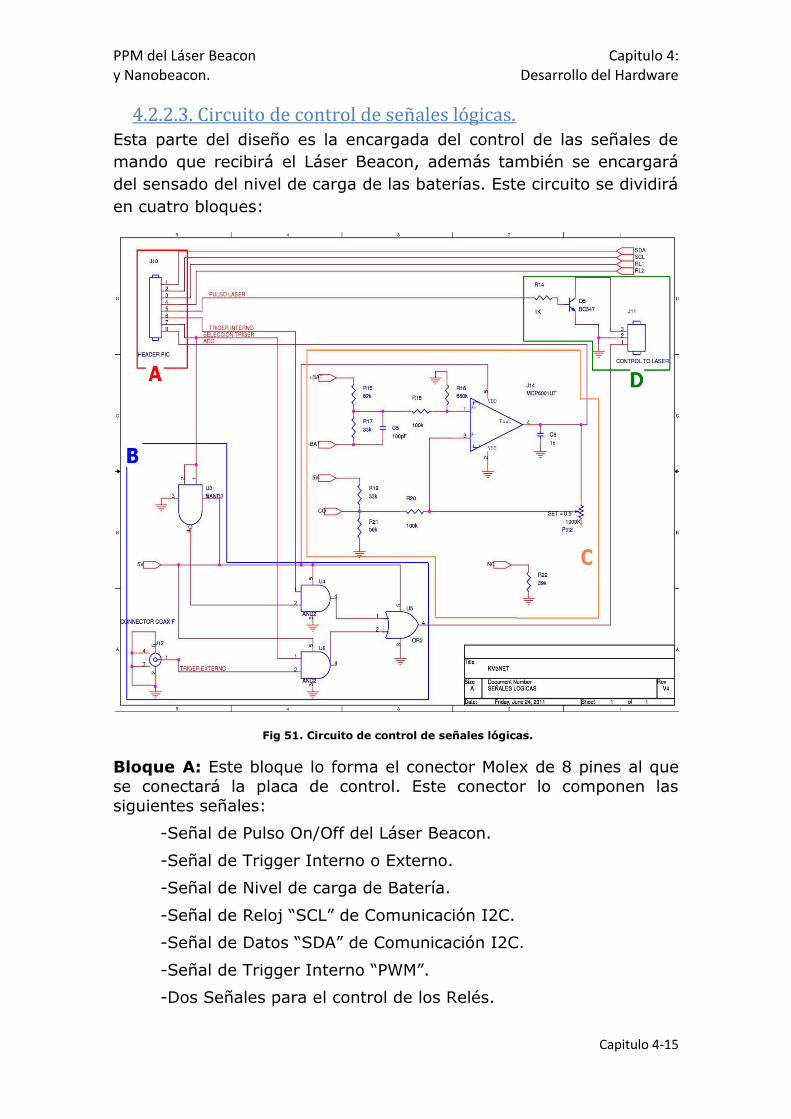
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-15
4.2.2.3. Circuito de control de señales lógicas. Esta parte del diseño es la encargada del control de las señales de
mando que recibirá el Láser Beacon, además también se encargará
del sensado del nivel de carga de las baterías. Este circuito se dividirá
en cuatro bloques:
Fig 51. Circuito de control de señales lógicas.
Bloque A: Este bloque lo forma el conector Molex de 8 pines al que
se conectará la placa de control. Este conector lo componen las
siguientes señales:
-Señal de Pulso On/Off del Láser Beacon.
-Señal de Trigger Interno o Externo.
-Señal de Nivel de carga de Batería.
-Señal de Reloj “SCL” de Comunicación I2C.
-Señal de Datos “SDA” de Comunicación I2C.
-Señal de Trigger Interno “PWM”.
-Dos Señales para el control de los Relés.
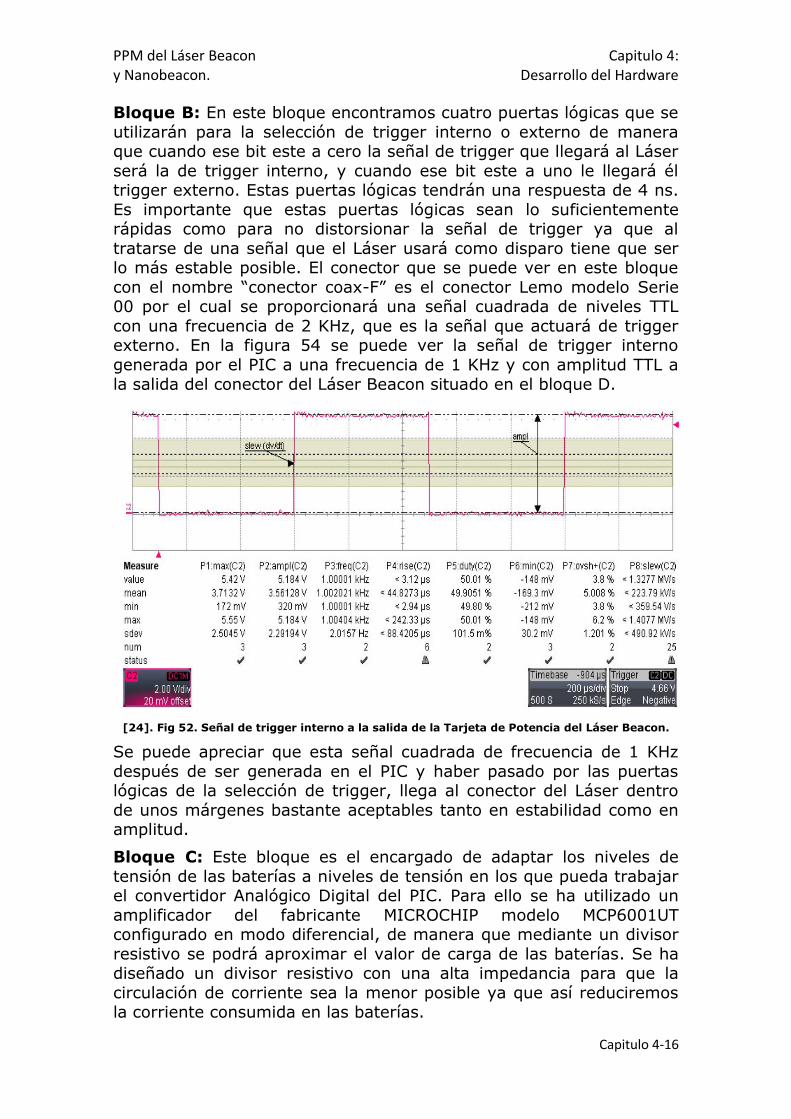
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-16
Bloque B: En este bloque encontramos cuatro puertas lógicas que se
utilizarán para la selección de trigger interno o externo de manera que cuando ese bit este a cero la señal de trigger que llegará al Láser
será la de trigger interno, y cuando ese bit este a uno le llegará él trigger externo. Estas puertas lógicas tendrán una respuesta de 4 ns.
Es importante que estas puertas lógicas sean lo suficientemente rápidas como para no distorsionar la señal de trigger ya que al
tratarse de una señal que el Láser usará como disparo tiene que ser lo más estable posible. El conector que se puede ver en este bloque
con el nombre “conector coax-F” es el conector Lemo modelo Serie 00 por el cual se proporcionará una señal cuadrada de niveles TTL
con una frecuencia de 2 KHz, que es la señal que actuará de trigger externo. En la figura 54 se puede ver la señal de trigger interno
generada por el PIC a una frecuencia de 1 KHz y con amplitud TTL a
la salida del conector del Láser Beacon situado en el bloque D.
[24]. Fig 52. Señal de trigger interno a la salida de la Tarjeta de Potencia del Láser Beacon.
Se puede apreciar que esta señal cuadrada de frecuencia de 1 KHz
después de ser generada en el PIC y haber pasado por las puertas lógicas de la selección de trigger, llega al conector del Láser dentro
de unos márgenes bastante aceptables tanto en estabilidad como en amplitud.
Bloque C: Este bloque es el encargado de adaptar los niveles de
tensión de las baterías a niveles de tensión en los que pueda trabajar el convertidor Analógico Digital del PIC. Para ello se ha utilizado un
amplificador del fabricante MICROCHIP modelo MCP6001UT configurado en modo diferencial, de manera que mediante un divisor
resistivo se podrá aproximar el valor de carga de las baterías. Se ha diseñado un divisor resistivo con una alta impedancia para que la
circulación de corriente sea la menor posible ya que así reduciremos la corriente consumida en las baterías.
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-17
Como en todo amplificador configurado en modo diferencial, la salida
será el resultado de la resta de la entrada positiva menos la negativa multiplicado por la ganancia del amplificador. Debido a que en los dos
modos de trabajo la tensión de la batería es muy diferente se ha utilizado el juego de contactos del relé cuatro que no se utilizaba para
modificar el valor de la entrada negativa cuando esté la tarjeta trabajando en modo Láser. De este modo conseguiremos aumentar el
rango de valores que podrá capturar el ADC del PIC. Los cálculos realizado en este bloque son:
Divisor de Tensión de la batería:
Para el divisor de tensión se ha tomado resistencias de valores 82 y
56.3 KΩ. Estas resistencias reducirán la tensión en la batería en un factor de 0.407. Por lo tanto el valor a la salida del divisor de tensión
será:
La corriente máxima consumida de las baterías cuando estén configuradas en modo serie:
La corriente máxima consumida cuando estén configuradas en modo
paralelo:
Divisor de Tensión de la Referencia de la patilla negativa del Amplificador diferencial:
Modo Carga
Modo Láser
El valor de este divisor resistivo cambiara en función del modo en el que se este trabajando, siendo 1.42 V cuando se este en modo Carga
y 4.36 V cuando se esté trabajando en modo Laser. De este modo se obtiene la posibilidad de aumentar el rango de tensiones que
medirá el Convertidor Analógico Digital del PIC ya que únicamente se
está utilizando un solo operacional, y un solo divisor resistivo para el sensado de los dos modos. La diferencia de tensión en la batería en
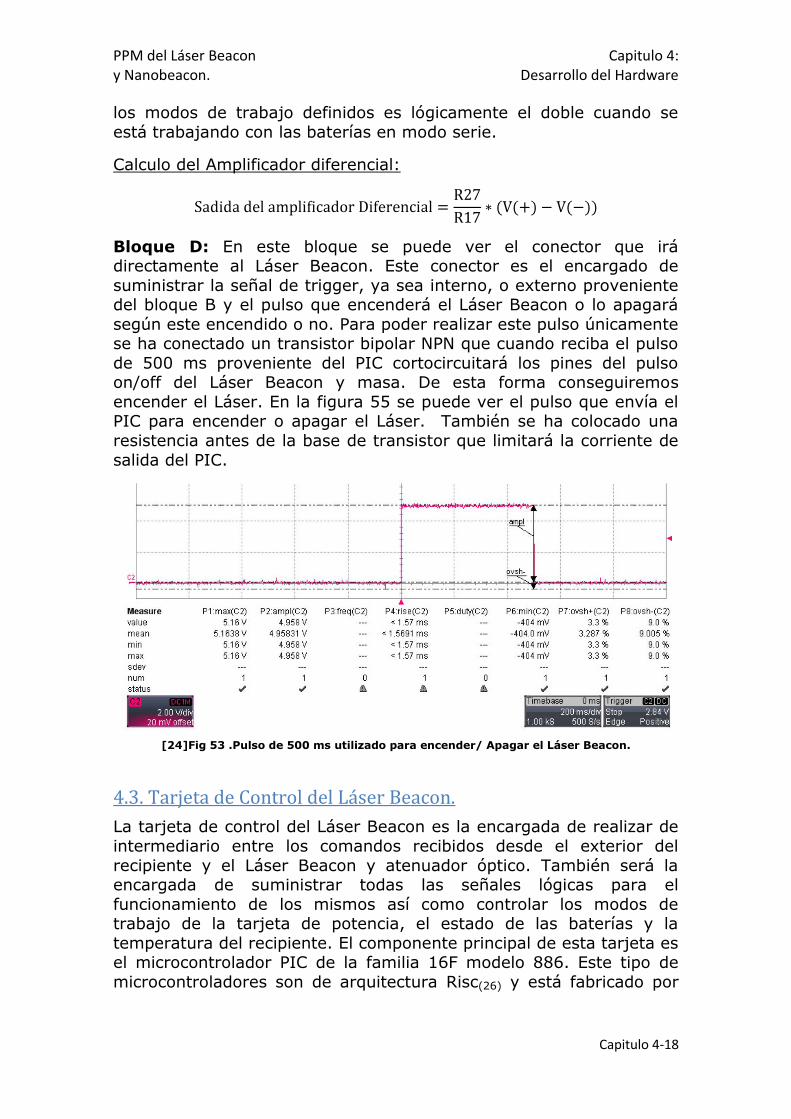
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-18
los modos de trabajo definidos es lógicamente el doble cuando se
está trabajando con las baterías en modo serie.
Calculo del Amplificador diferencial:
Bloque D: En este bloque se puede ver el conector que irá directamente al Láser Beacon. Este conector es el encargado de
suministrar la señal de trigger, ya sea interno, o externo proveniente del bloque B y el pulso que encenderá el Láser Beacon o lo apagará
según este encendido o no. Para poder realizar este pulso únicamente se ha conectado un transistor bipolar NPN que cuando reciba el pulso
de 500 ms proveniente del PIC cortocircuitará los pines del pulso on/off del Láser Beacon y masa. De esta forma conseguiremos
encender el Láser. En la figura 55 se puede ver el pulso que envía el PIC para encender o apagar el Láser. También se ha colocado una
resistencia antes de la base de transistor que limitará la corriente de
salida del PIC.
[24]Fig 53 .Pulso de 500 ms utilizado para encender/ Apagar el Láser Beacon.
4.3. Tarjeta de Control del Láser Beacon.
La tarjeta de control del Láser Beacon es la encargada de realizar de
intermediario entre los comandos recibidos desde el exterior del
recipiente y el Láser Beacon y atenuador óptico. También será la encargada de suministrar todas las señales lógicas para el
funcionamiento de los mismos así como controlar los modos de trabajo de la tarjeta de potencia, el estado de las baterías y la
temperatura del recipiente. El componente principal de esta tarjeta es el microcontrolador PIC de la familia 16F modelo 886. Este tipo de
microcontroladores son de arquitectura Risc(26) y está fabricado por
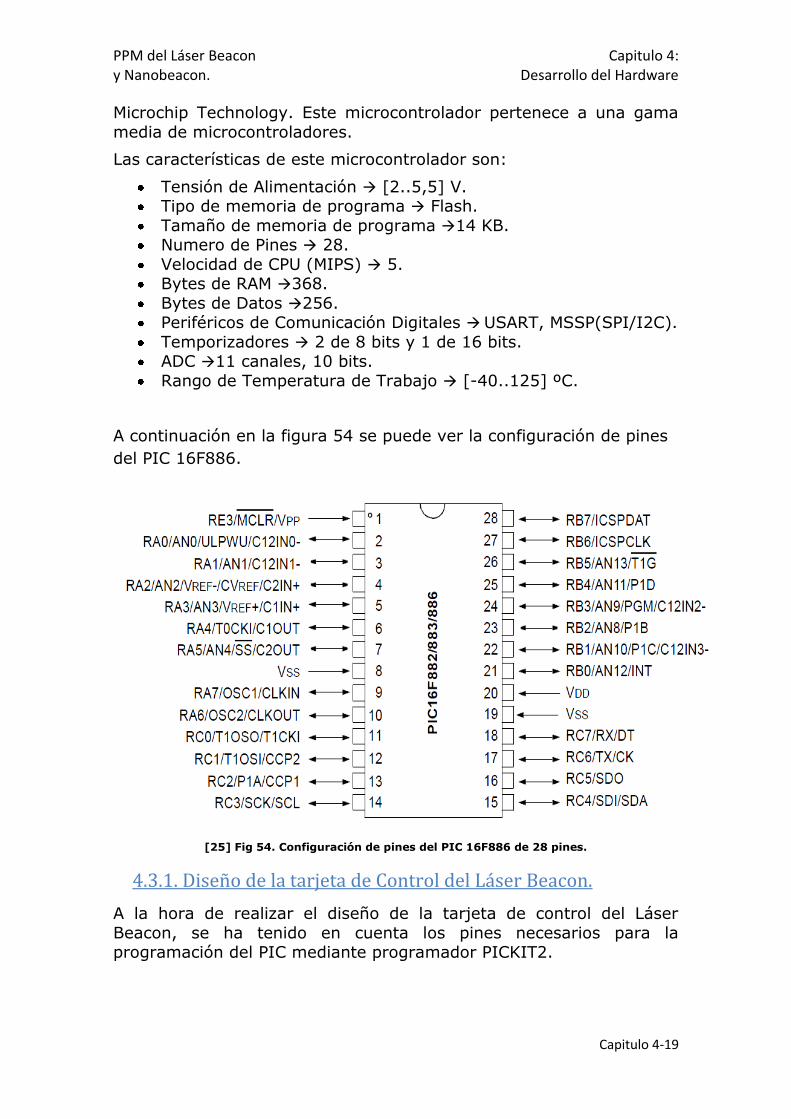
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-19
Microchip Technology. Este microcontrolador pertenece a una gama
media de microcontroladores.
Las características de este microcontrolador son:
Tensión de Alimentación [2..5,5] V. Tipo de memoria de programa Flash.
Tamaño de memoria de programa 14 KB. Numero de Pines 28.
Velocidad de CPU (MIPS) 5. Bytes de RAM 368.
Bytes de Datos 256. Periféricos de Comunicación Digitales USART, MSSP(SPI/I2C).
Temporizadores 2 de 8 bits y 1 de 16 bits. ADC 11 canales, 10 bits.
Rango de Temperatura de Trabajo [-40..125] ºC.
A continuación en la figura 54 se puede ver la configuración de pines
del PIC 16F886.
[25] Fig 54. Configuración de pines del PIC 16F886 de 28 pines.
4.3.1. Diseño de la tarjeta de Control del Láser Beacon.
A la hora de realizar el diseño de la tarjeta de control del Láser
Beacon, se ha tenido en cuenta los pines necesarios para la programación del PIC mediante programador PICKIT2.

PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-20
Los pines que necesitara este programador son:
PICkit 2 PIC16f886
Pin 1 1 Vpp
Pin 4 28 ICSP DAT
Pin 5 27 ICSP CLK
Pin 6 6 RA4
Los pines del programador 2 y 3 están destinados a (Vcc y Gnd) respectivamente.
En la figura 55 se puede ver el esquemático de la tarjeta de control. Este circuito se dividirá en cuatro partes.
.Fig 55. Esquemático de la tarjeta de control del Láser Beacon.
Bloque A: Este es bloque principal del circuito donde se puede ver el
microcontrolador PIC16f886. Este microcontrolador tiene configurados por defecto los siguientes pines:
Pin 1 Pin de Reset del micro. Es activo a nivel bajo. No se ha
habilitado por considerarse innecesario. Pines 8 y 9 Pines destinados para el oscilador de alta
velocidad.
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-21
Pines 1,6,27,28 Pines destinados a la programación del PIC
mediante el programador PICKiT2. Pines 19 y 20 Alimentación del micro.
Los pines que también se van a utilizar para el desarrollo del programa de control del Láser Beacon son:
Pines 2 y 3 Lectura de valores de tensión de las baterías y temperatura del recipiente. Las lecturas se tomaran mediante el
ADC del PIC configurado para cada caso. Pin 6 Señal de Habilitación de Trigger interno o externo.
Pin 13 Señal de trigger Interno, salida del Modulo PWM CPP1. Pines 14 y 15 Pines Habilitados por defecto, son “SCL” y
“SDA” respectivamente y están preconfigurados en la función para la comunicación I2C. Estos pines se pueden cambiar en el
programa en C si fuese necesario.
Pines 17 y 18 Pines Habilitados para la comunicación Rs232, son “Tx” y “Rx” respectivamente. Mediante la programacion
también podemos cambiarlos. Pines 26 y 27 Señales de habilitación para los Relés.
Pin 28 Señal de Encendido o Apagado del Láser Beacon.
Este bloque además del PIC también lo forman:
El oscilador externo necesario para funcionamiento del PIC
cuando esté configurado con oscilación externa. Este oscilador lo compondrán un cristal de 4 Mhz, una Resistencia de 1 Mega
Ohmio en paralelo con el cristal y dos condensadores de 22 pico Faradios.
Un conector Molex de 2 pines el cual proporcionará una alimentación de 5 V a toda la tarjeta, esta alimentación vendrá
del Dc/Dc de 12 a 5 V de la tarjeta de potencia del Láser
Beacon. Un conector Molex de 3 pines para la comunicación por RS232.
Un conector Molex de 8 pines para la comunicación de las señales de control y sensado de baterías con la placa de
potencia del Láser Beacon.
Bloque B: Este bloque únicamente lo forma conector necesario para la programación del micro mediante el PICKiT2.
Bloque C: Este bloque lo forma el circuito integrado MAX232. Este circuito es el encargado de adaptar los niveles de tensión de la
comunicación RS232 recibida por el conector “Header 3” para que tenga unos niveles de tensión que sean compatibles con el PIC.
Bloque D: Este bloque es el de medición de temperatura en el recipiente. Para esta función se ha utilizado un sensor lineal del tipo

PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-22
LM35DM que tiene una salida de [0…10] mV por grado centígrado
aproximadamente, además se han utilizado dos amplificadores modelo LM358 los cuales están configurados en modo de seguidor
con el fin de adaptar la impedancia y el segundo a en configuración no inversora para amplificar por dos la tensión de salida del sensor de
temperatura recibida en el PIC. Se ha utilizado un potenciómetro en vez de una resistencia en la realimentación para realizar un ajuste
fino de la ganancia.
La ganancia de este amplificador configurado en modo no inversor se
puede calcular con la siguiente fórmula:
4.4. Tarjeta del Nanobeacon. El Nanobeacon es junto con el Láser Beacon el principal componente
en el sistema de calibración del Telescopio de Neutrinos KM3NeT. Irán
instalados dos Nanobeacon por módulo Óptico o DOM. Este prototipo
tiene que suministrar la suficiente potencia como para que el diodo
Led que está instalado en el circuito de Emisión “Pulser” pueda tener
una potencia de emisión suficiente para poder calibrar el
Fotomultiplicador que este situado a 40 metros por encima o por
debajo según este orientado el Nanobeacon. Ira alimentado a, una
tensión de 3,3 V y su consumo no es superior a los 50 mA. Este
prototipo estará formado por estos dos circuitos:
-Tarjeta de Control.
-Tarjeta de Pulser.
4.4.1. Tarjeta de Contro de Potencia. Esta tarjeta es la encargada controlar la emisión de la tarjeta
“Pulser”. Esta se divide en tres partes:
-Circuito de Control.
-Circuito de potencia.
-Circuito de Adquisición de Señales.
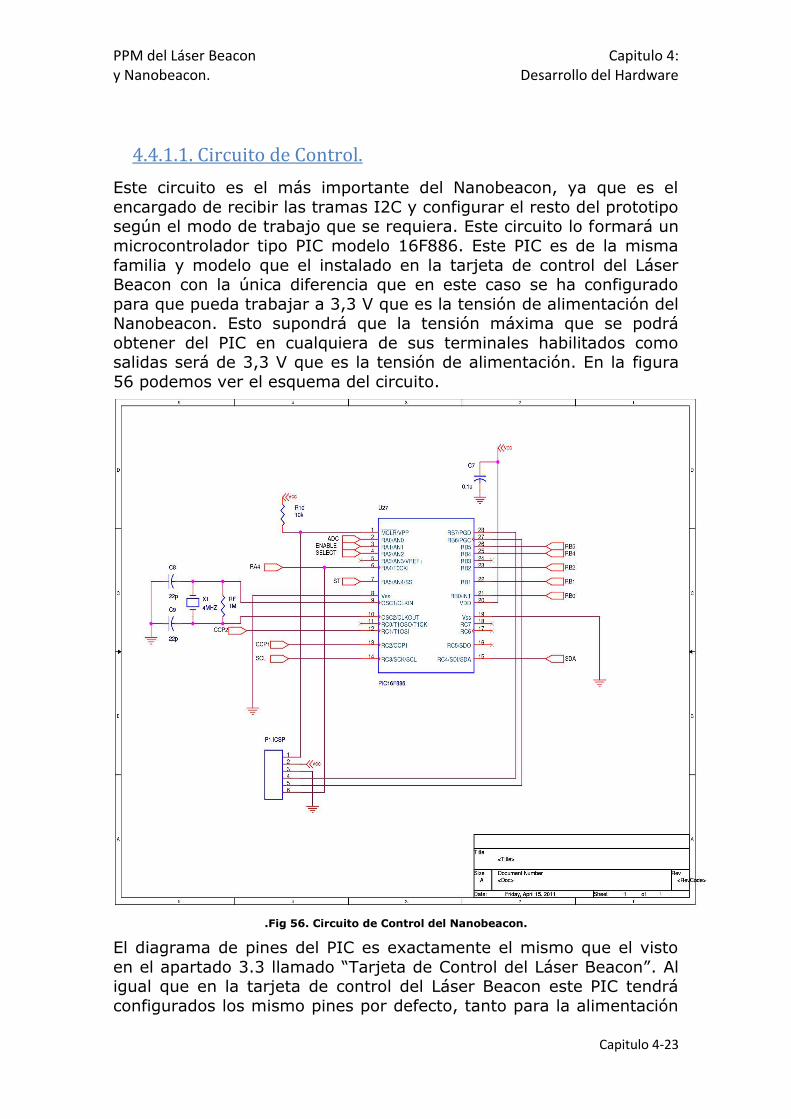
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-23
4.4.1.1. Circuito de Control.
Este circuito es el más importante del Nanobeacon, ya que es el
encargado de recibir las tramas I2C y configurar el resto del prototipo según el modo de trabajo que se requiera. Este circuito lo formará un
microcontrolador tipo PIC modelo 16F886. Este PIC es de la misma
familia y modelo que el instalado en la tarjeta de control del Láser Beacon con la única diferencia que en este caso se ha configurado
para que pueda trabajar a 3,3 V que es la tensión de alimentación del Nanobeacon. Esto supondrá que la tensión máxima que se podrá
obtener del PIC en cualquiera de sus terminales habilitados como salidas será de 3,3 V que es la tensión de alimentación. En la figura
56 podemos ver el esquema del circuito.
.Fig 56. Circuito de Control del Nanobeacon.
El diagrama de pines del PIC es exactamente el mismo que el visto
en el apartado 3.3 llamado “Tarjeta de Control del Láser Beacon”. Al igual que en la tarjeta de control del Láser Beacon este PIC tendrá
configurados los mismo pines por defecto, tanto para la alimentación

PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-24
como para la programación mediante el programador PICKiT2. La
única diferencia es que ira alimentado a 3,3 V en vez de a 5 V. Otros pines que se van a utilizar para el desarrollo de mi programa son:
Pin 2 Este pin se utilizará para Habilitar mediante un uno lógico o deshabilitar mediante un cero lógico el bit de
habilitación del booster instalado en el circuito de Potencia del Nanobeacon.
Pin 4 Señal de Habilitación de Trigger interno o externo. Pin 12 Señal de “duty programable”. Es una señal con la
misma frecuencia que la del CPP1 pero en la que modificaremos el duty para controlar la potencia suministrada por el booster
del circuito de potencia del Nanobeacon.
Pin 13 Señal de trigger interno. Salida del Modulo PWM CPP1. Pines 14 y 15 Pines Habilitados por defecto. Son “SCL” y
“SDA” respectivamente y están preconfigurados en la función para la comunicación I2C. Estos pines se pueden cambiar en el
programa en C, si fuese necesario.
También se puede ver en este circuito el oscilador externo que
proporcionara la señal de reloj exterior al PIC. La única diferencia que tendrá respecto al visto en el apartado 3.3 será que se ha utilizado un
cristal de 4 Mhz en vez de 2 Mhz. Además se puede ver también el conector del programador PICKiT2. A continuación se pueden en las
figuras 59 y 60 la señal de trigger emitida y esa misma señal de trigger a la salida de la tarjeta después de haber pasado por las
puertas lógicas encargadas de la selección de trigger interno o externo así como la señal de duty que se utilizará para controlar el
micro convertidor modelo LT3464.
[24] Fig 57. Señal de Trigger emitida a la salida del PIC 16F886.

PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-25
[24] Fig 58. Señal de Trigger emitida por el PIC a la salida de las puertas lógicas.
[24]Fig 59. Señal de duty del 10% emitida por el PIC16f886.
[24]Fig 60. Señal de duty máxima emitida por el PIC 16886.
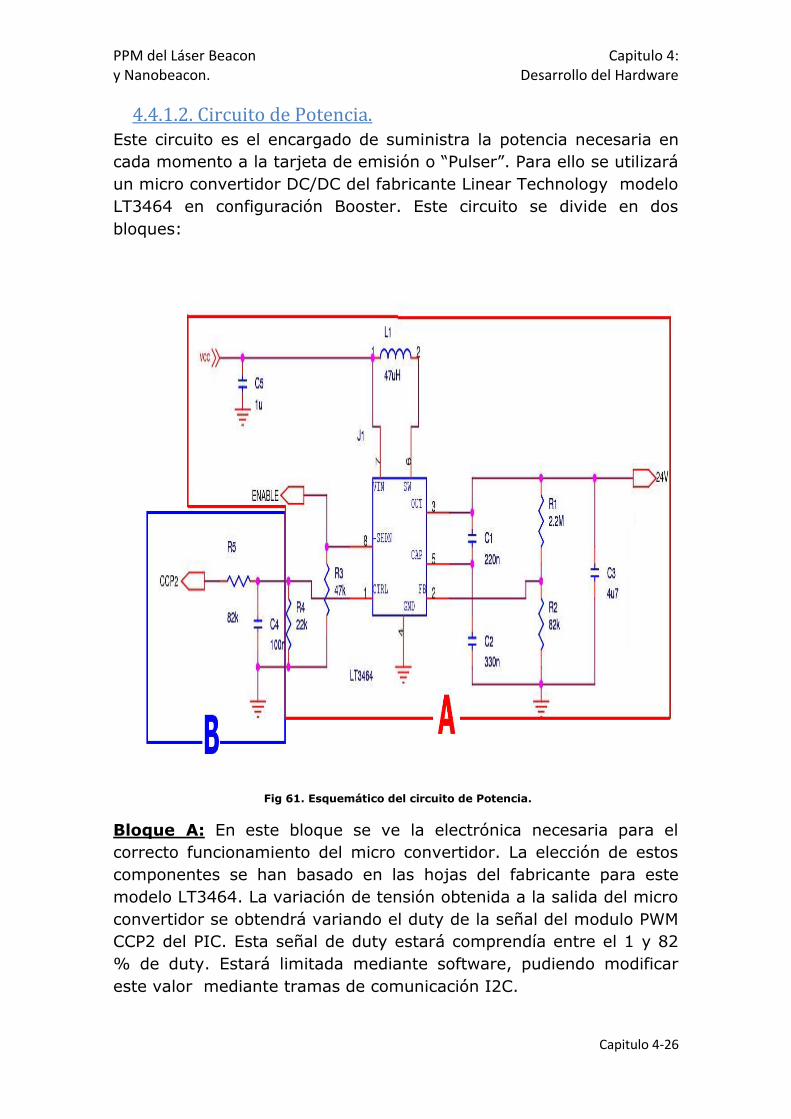
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-26
4.4.1.2. Circuito de Potencia. Este circuito es el encargado de suministra la potencia necesaria en
cada momento a la tarjeta de emisión o “Pulser”. Para ello se utilizará
un micro convertidor DC/DC del fabricante Linear Technology modelo
LT3464 en configuración Booster. Este circuito se divide en dos
bloques:
Fig 61. Esquemático del circuito de Potencia.
Bloque A: En este bloque se ve la electrónica necesaria para el
correcto funcionamiento del micro convertidor. La elección de estos
componentes se han basado en las hojas del fabricante para este
modelo LT3464. La variación de tensión obtenida a la salida del micro
convertidor se obtendrá variando el duty de la señal del modulo PWM
CCP2 del PIC. Esta señal de duty estará comprendía entre el 1 y 82
% de duty. Estará limitada mediante software, pudiendo modificar
este valor mediante tramas de comunicación I2C.
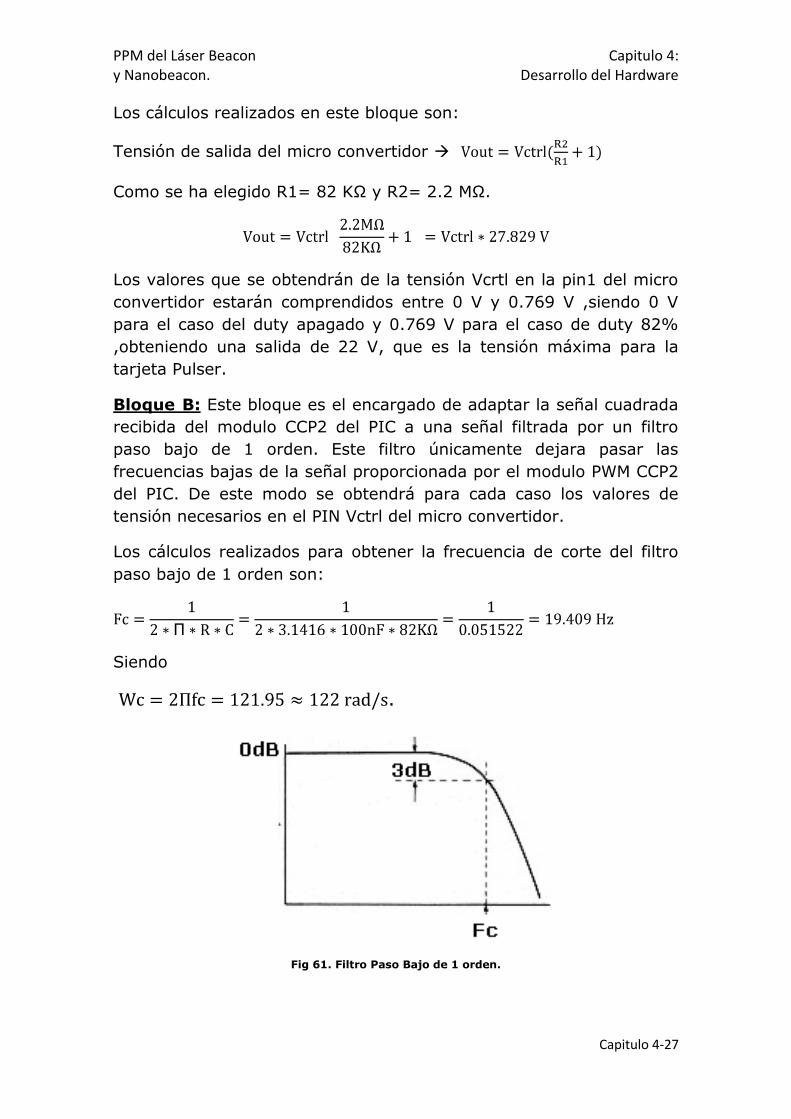
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-27
Los cálculos realizados en este bloque son:
Tensión de salida del micro convertidor
Como se ha elegido R1= 82 KΩ y R2= 2.2 MΩ.
Los valores que se obtendrán de la tensión Vcrtl en la pin1 del micro
convertidor estarán comprendidos entre 0 V y 0.769 V ,siendo 0 V
para el caso del duty apagado y 0.769 V para el caso de duty 82%
,obteniendo una salida de 22 V, que es la tensión máxima para la
tarjeta Pulser.
Bloque B: Este bloque es el encargado de adaptar la señal cuadrada
recibida del modulo CCP2 del PIC a una señal filtrada por un filtro
paso bajo de 1 orden. Este filtro únicamente dejara pasar las
frecuencias bajas de la señal proporcionada por el modulo PWM CCP2
del PIC. De este modo se obtendrá para cada caso los valores de
tensión necesarios en el PIN Vctrl del micro convertidor.
Los cálculos realizados para obtener la frecuencia de corte del filtro
paso bajo de 1 orden son:
Siendo
.
Fig 61. Filtro Paso Bajo de 1 orden.
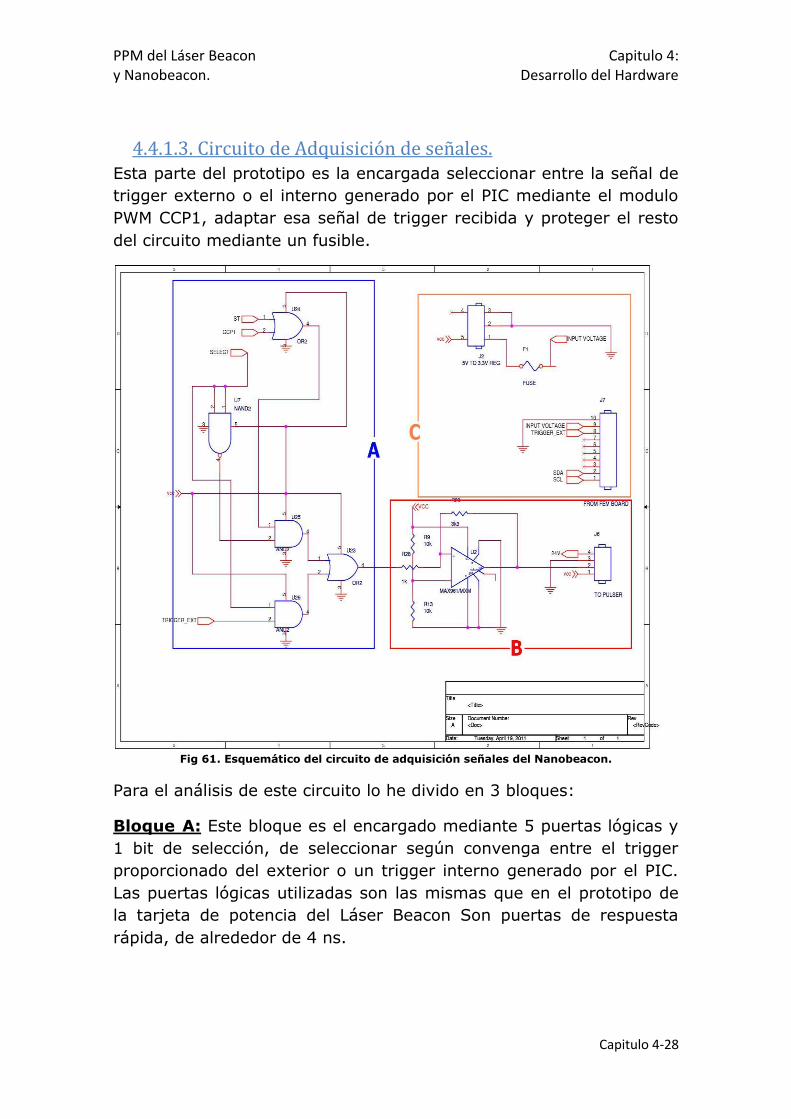
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-28
4.4.1.3. Circuito de Adquisición de señales. Esta parte del prototipo es la encargada seleccionar entre la señal de
trigger externo o el interno generado por el PIC mediante el modulo
PWM CCP1, adaptar esa señal de trigger recibida y proteger el resto
del circuito mediante un fusible.
Fig 61. Esquemático del circuito de adquisición señales del Nanobeacon.
Para el análisis de este circuito lo he divido en 3 bloques:
Bloque A: Este bloque es el encargado mediante 5 puertas lógicas y
1 bit de selección, de seleccionar según convenga entre el trigger
proporcionado del exterior o un trigger interno generado por el PIC.
Las puertas lógicas utilizadas son las mismas que en el prototipo de
la tarjeta de potencia del Láser Beacon Son puertas de respuesta
rápida, de alrededor de 4 ns.
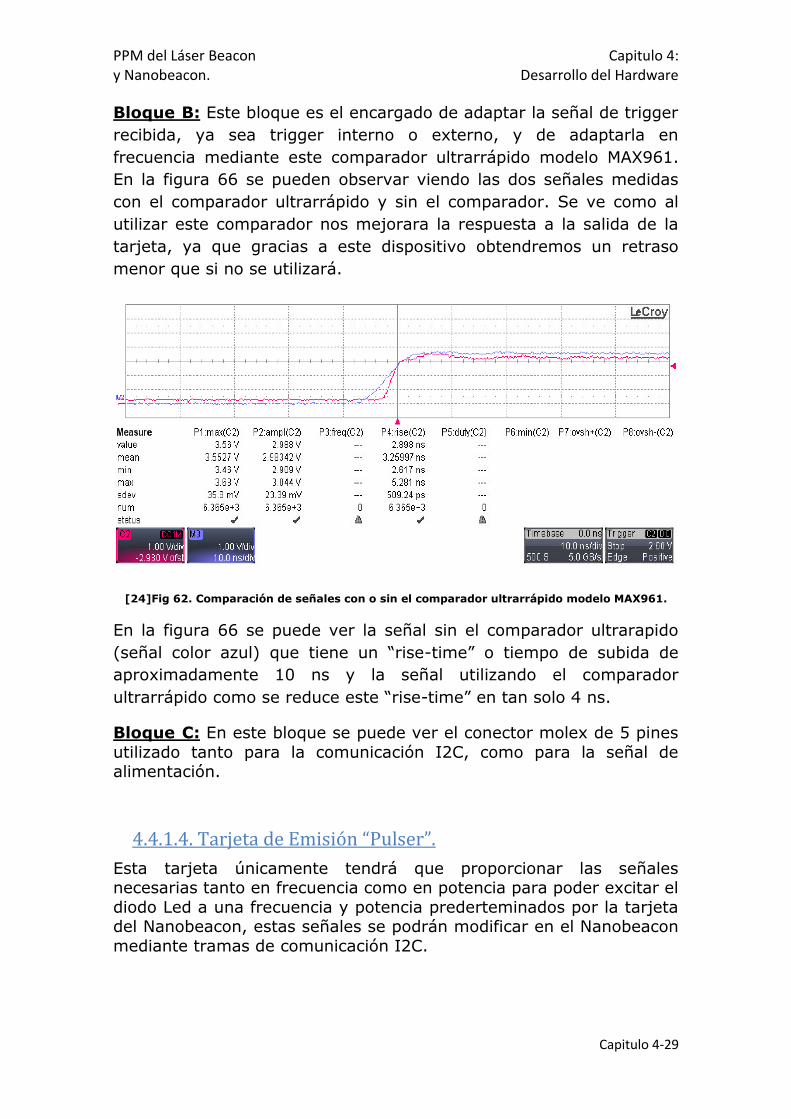
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-29
Bloque B: Este bloque es el encargado de adaptar la señal de trigger
recibida, ya sea trigger interno o externo, y de adaptarla en
frecuencia mediante este comparador ultrarrápido modelo MAX961.
En la figura 66 se pueden observar viendo las dos señales medidas
con el comparador ultrarrápido y sin el comparador. Se ve como al
utilizar este comparador nos mejorara la respuesta a la salida de la
tarjeta, ya que gracias a este dispositivo obtendremos un retraso
menor que si no se utilizará.
[24]Fig 62. Comparación de señales con o sin el comparador ultrarrápido modelo MAX961.
En la figura 66 se puede ver la señal sin el comparador ultrarapido
(señal color azul) que tiene un “rise-time” o tiempo de subida de
aproximadamente 10 ns y la señal utilizando el comparador
ultrarrápido como se reduce este “rise-time” en tan solo 4 ns.
Bloque C: En este bloque se puede ver el conector molex de 5 pines
utilizado tanto para la comunicación I2C, como para la señal de alimentación.
4.4.1.4. Tarjeta de Emisión “Pulser”.
Esta tarjeta únicamente tendrá que proporcionar las señales necesarias tanto en frecuencia como en potencia para poder excitar el
diodo Led a una frecuencia y potencia prederteminados por la tarjeta del Nanobeacon, estas señales se podrán modificar en el Nanobeacon
mediante tramas de comunicación I2C.

PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-30
El esquemático de esta tarjeta se puede ver en la figura 63.
Fig 63. Esquemático de la tarjeta de emisión o “Pulser”.
4.5. PCBs. Para el desarrollo de este proyecto se han fabricado las siguientes
placas de circuito impreso:
Placa de potencia del Láser Beacon de 170.19x110 mm.
Placa de control del Láser Beacon de 58.35x46.16 mm.
Placa del Nanobeacon de 47.90x35.16 mm.
Las placas de han fabricado con un grosor de cobre de 25 micras para
la placa del Control del Láser Beacon ya que no se han utilizado pasa
caras para la comunicación entre las dos caras de la placa. Para las
otras dos placas se han utilizado dos caras TOP y BOT y pasa caras,
debido a esto se ha aumentado el grosor de cobre hasta 35 micras.
En las siguientes figuras se pueden ver las imágenes de estas tres
placas mediante la aplicación de Layout del software de diseño
electrónico Orcad.

PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-31
Fig 64. Placa de potencia del Láser Beacon.
Fig 65. Tarjeta de Control del Láser Beacon.
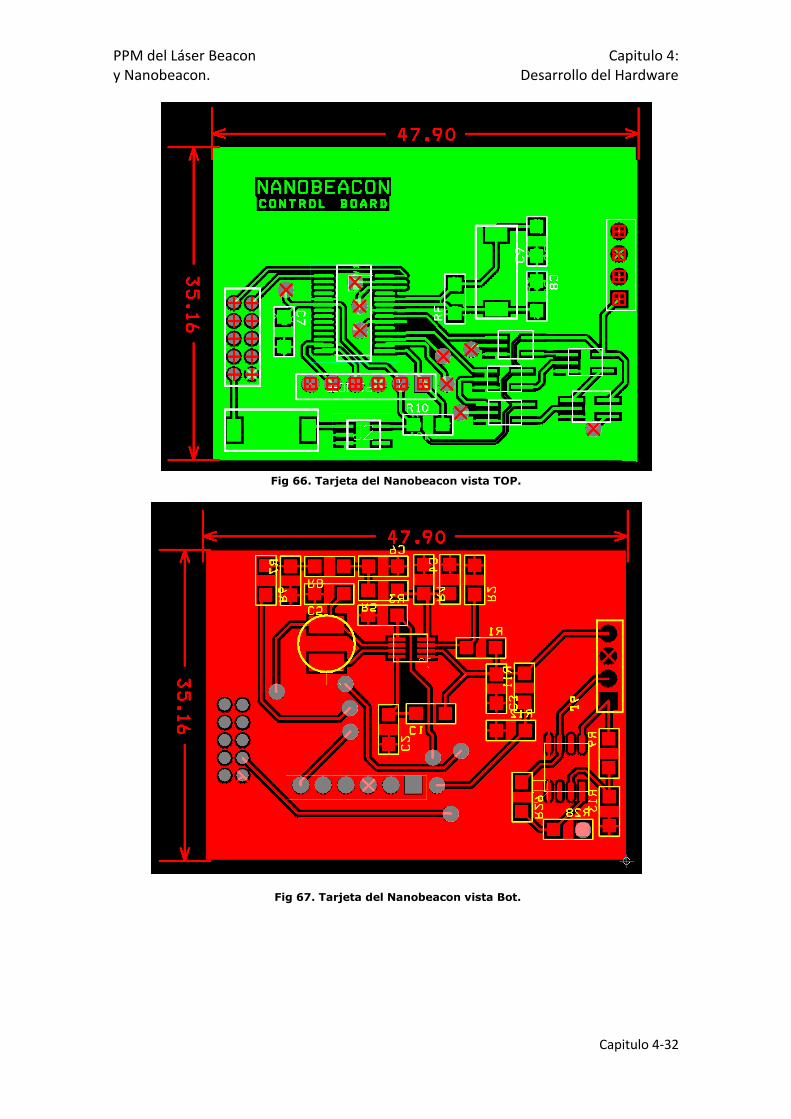
PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-32
Fig 66. Tarjeta del Nanobeacon vista TOP.
Fig 67. Tarjeta del Nanobeacon vista Bot.

PPM del Láser Beacon Capitulo 4: y Nanobeacon. Desarrollo del Hardware
Capitulo 4-33
Fig 68. Tarjeta Pulser del Nanobeacon.
Capitulo 5-1
La finalidad de este capítulo es dar a conocer los motivos por el cual
se han escogido los siguientes programas para el completo desarrollo de este proyecto, así como el software desarrollado para el mismo.
5.1 Lenguaje de Programación.
Se ha escogido el lenguaje C para la programación de los
microcontroladores de tipo PIC ya que al ser un lenguaje de alto nivel y no estar asociado a ningún sistema operativo se puede decir que es
conocido como el lenguaje de programación más utilizado. Entre las ventajas más importantes a la hora de utilizar este lenguaje de
programación podemos destacar:
Es un lenguaje de programación de alto nivel, lo cual lo hace
más amigable para el programador.
Es un lenguaje muy flexible.
Muy apropiado para controlar rutinas hechas en ensamblador.
Permite generar programas de fácil modificación.
Posibilita una programación estructurada o modular.
Su gran transportabilidad o portabilidad, se puede utilizar tanto en macroordenadores y en microordenadores.
Gran variedad de ejemplos, librerías y funciones que simplifican mucho la tarea de programación.
Por todo esto vemos que este lenguaje de programación es el más apropiado para cumplir requisitos que se han establecido a modo de
pliego de condiciones para el diseño del hardware.
5.2. Compilación de los PIC mediante PCWH de CCS,
El compilador PCWH diseñado por la empresa Custom Computer
Services Incorporated (CCS) contiene gran variedad de operadores estándar C, es compatible con la mayoría de los PIC de la familia 10F,
12F, 16F, 18F y DSPIC entre otros, además de incluir numerosas bibliotecas de funciones que son específicas a los registros de PIC.
Éste proporciona a los desarrolladores una herramienta poderosa
para acceder a las funciones del dispositivo de hardware desde el nivel del lenguaje C.

PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-2
Se ha elegido este software, entre otras cualidades, por ser un
software gratuito y tener una gran facilidad de comprensión, además es el compilador recomendado por el fabricante Microchip. Así la
última versión de MPLAB se ha incluido el CCS como un plugin o software externo al MPLAB necesario para poder compilar en C los
PIC de la familia 16F entre otros. Además dispone de un magnifico menú de ayuda y un estupendo asistente. Mediante un interface
grafico te permite, una vez seleccionado el dispositivo con el que se va a trabajar, ver en unas pocas pestañas la gran mayoría de
registros, funciones, fusibles, temporizadores, módulos PWM o ADC.
[26] Fig 69 .Captura de Imagen de PCWH de CCS.
5.3. Diseño del Programa en C del Láser Beacon.
A la hora de diseñar un programa en C o en cualquier otro lenguaje de programación lo primero es realizar un diagrama de flujo en el que
se puedan ver cuáles son las necesidades del programa, el tipo de
módulos del micro que se va a necesitar y los tipos de funciones que se necesitaran. De esta forma se diseñara un programa más
ordenado, robusto y más sencillo a la hora de depurar errores.
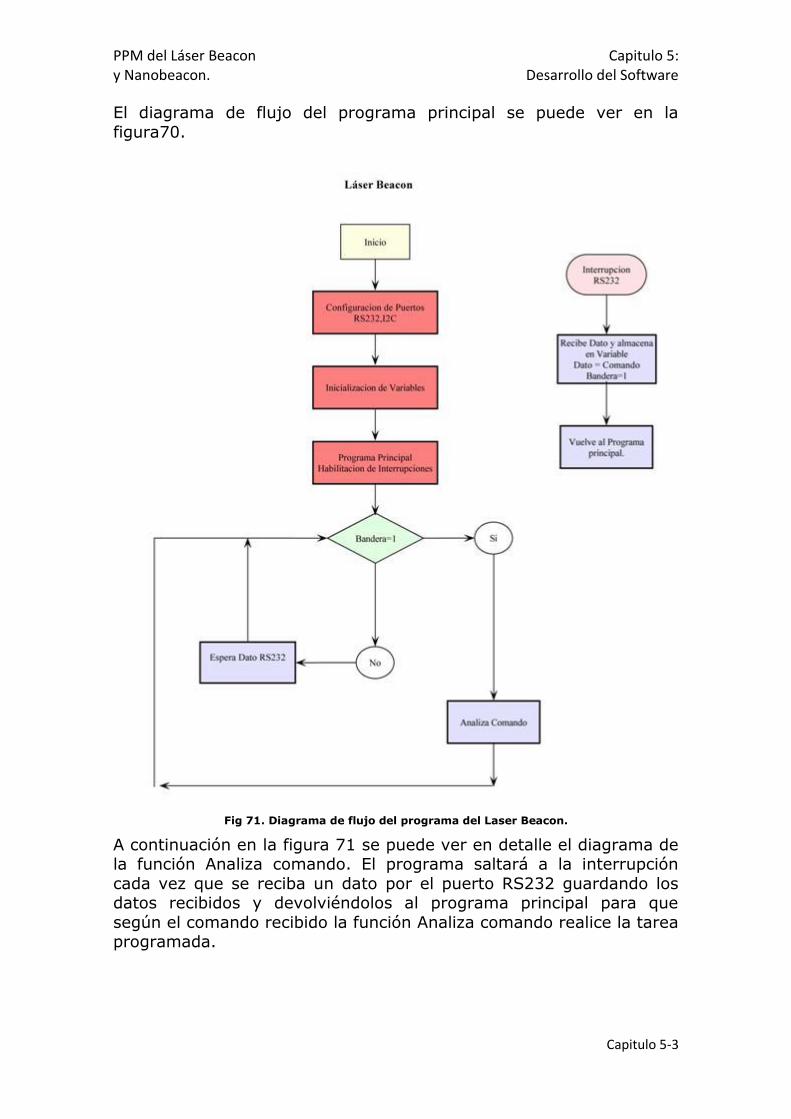
PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-3
El diagrama de flujo del programa principal se puede ver en la
figura70.
Fig 71. Diagrama de flujo del programa del Laser Beacon.
A continuación en la figura 71 se puede ver en detalle el diagrama de la función Analiza comando. El programa saltará a la interrupción
cada vez que se reciba un dato por el puerto RS232 guardando los datos recibidos y devolviéndolos al programa principal para que
según el comando recibido la función Analiza comando realice la tarea programada.

PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-4
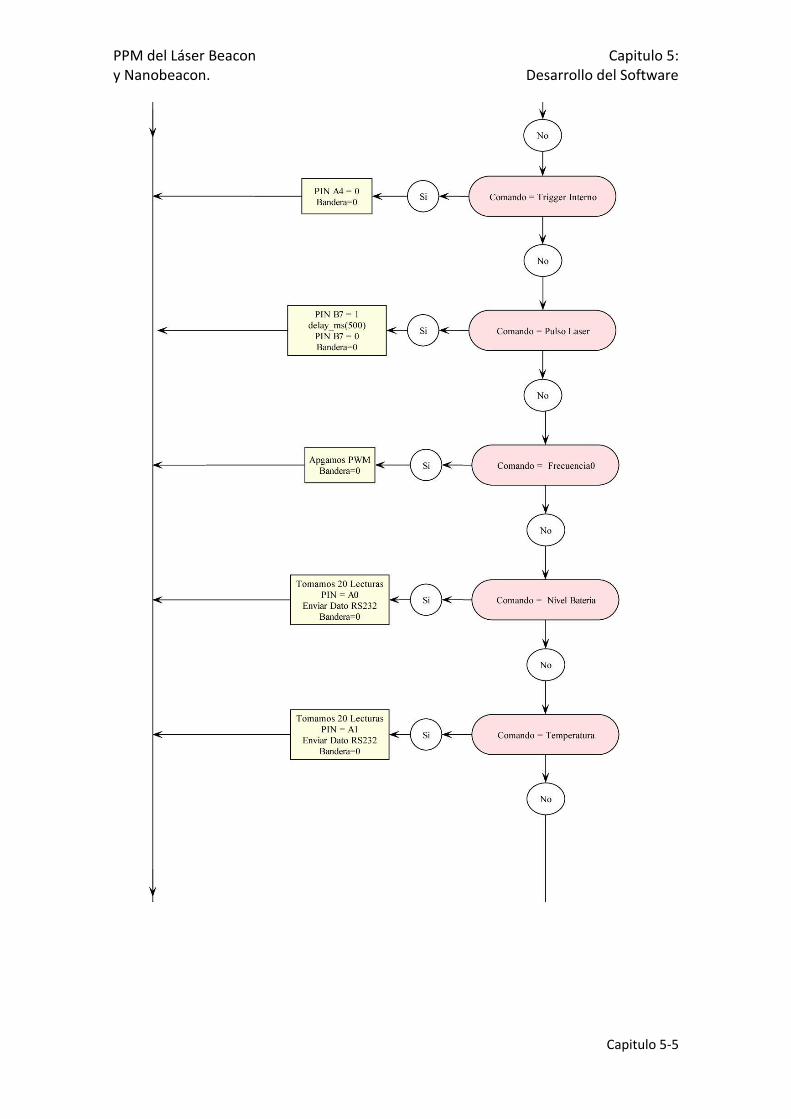
PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-5
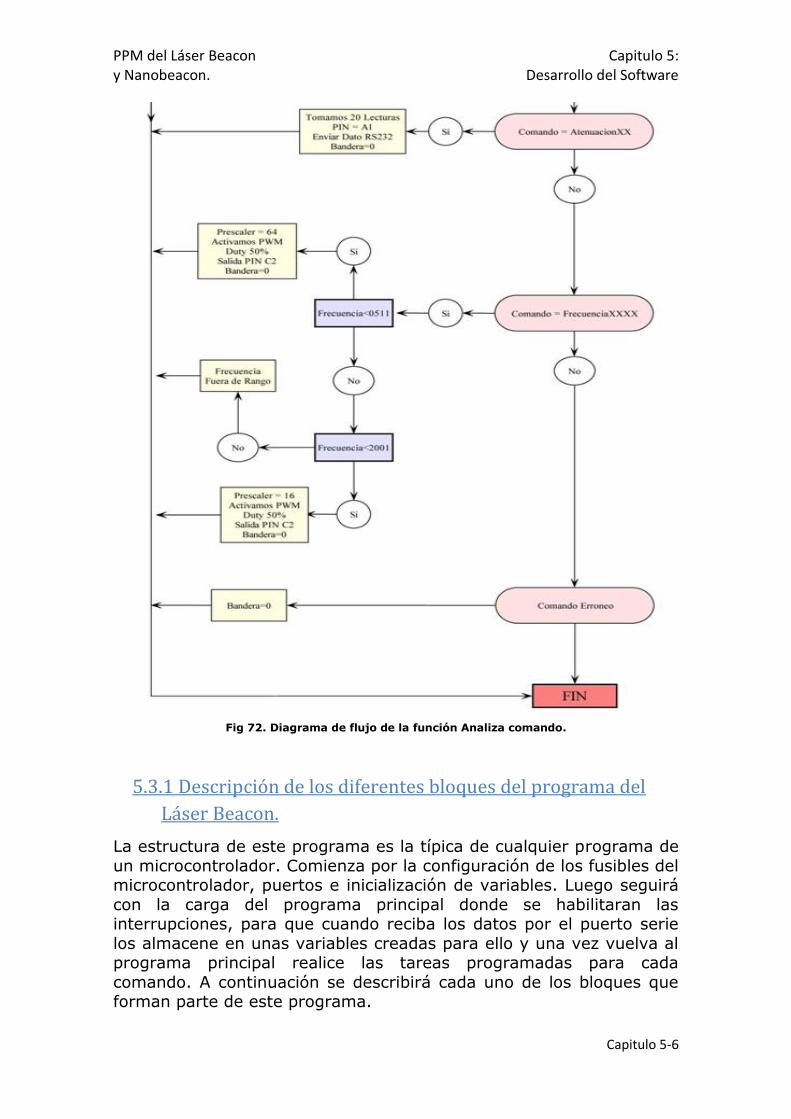
PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-6
Fig 72. Diagrama de flujo de la función Analiza comando.
5.3.1 Descripción de los diferentes bloques del programa del
Láser Beacon.
La estructura de este programa es la típica de cualquier programa de
un microcontrolador. Comienza por la configuración de los fusibles del microcontrolador, puertos e inicialización de variables. Luego seguirá
con la carga del programa principal donde se habilitaran las interrupciones, para que cuando reciba los datos por el puerto serie
los almacene en unas variables creadas para ello y una vez vuelva al programa principal realice las tareas programadas para cada
comando. A continuación se describirá cada uno de los bloques que forman parte de este programa.
PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-7
1. Configuración de fusibles y puertos serie.
En este bloque se realizan las siguientes tareas:
Se declaran las librerías que utilizaremos.
Se definen los bits de configuración o “fusibles” del micro. Se establece la configuración del puerto serie tanto para RS232
como I2C.
Configuración RS232.
La velocidad en baudios a la que trabajará el puerto serie. En este caso se ha configurado a 9600 baudios.
Los pines de transmisión/recepción del microcontrolador. Se han configurado los pines C6 y C7 respectivamente.
El número de bits de datos que queremos transmitir/recibir y la paridad. Se ha configurado para trabajar con 8 bits y sin
paridad.
Configuración I2C.
Se configura el dispositivo como Maestro.
Se configura como tipo de velocidad implementada en la función I2C. Esta velocidad es de 400Khz.
2. Inicialización de variables.
En este bloque se inicializan todas las variables que se van a utilizar
durante el desarrollo del programa así como los subprogramas que serán necesarios.
3. Interrupción RDA “RS232”.
Cada vez que se reciba un dato por el puerto serie saltará esta
interrupción. En este bloque se deberá almacenar ese dato de la comunicación RS232 recibido y volver al programa principal en la
posición que se encontraba antes de saltar la interrupción.
4. Programa Principal.
En este bloque es donde siempre se encontrara el microcontrolador
esperando a recibir un dato por el puerto serie. En él se configurarán los temporizadores, comparadores, módulos PWM(27) y demás si fuese
necesario. Además de habilitarse las interrupciones que se vayan a utilizar después. Una vez recibido el dato de la comunicación RS232 y
guardados los comandos en las variables creadas para ello, el programa mediante una condición que solo se activa después de
haber saltado la interrupción RS232 y haber almacenado los datos recibidos. El micro volverá al programa principal en el mismo punto
que estaba antes de saltar la interrupción para comprobar que se cumple la condición de dato recibido, ejecutando seguidamente la
función “Analiza Comando” y actuando según el valor del comando
PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-8
recibido de la manera predefina en el código programado. A
continuación se va describir en detalle los comandos del programa.
Para el encendido o apagado del Láser Beacon se genera un pulso de
500 milisegundos de duración de estado alto por el pin RB7. Este mismo pulso encenderá el Láser cuando éste esté apagado pero con
la tarjeta controladora encendida y lo apagará cuando este encendido.
Pulso_Laser: Envía pulso por el pin RB7.
Para la selección de trigger interno o externo se ha habilitado el pin
RA4 que se pondrá a estado alto “trigger externo” o a estado bajo “trigger interno”. De esta manera se configurarán las puertas lógicas
de la placa de alimentación del Láser Beacon. Para que cuando este bit esté a cero habilite el trigger interno generado por el PIC y cuando
este bit este a uno se habilité el trigger externo recibido desde el exterior. Los comandos a utilizar serían:
Trigger_int: Trigger interno activado, pin RA4=0.
Trigger_ext: Trigger externo activado, pin RA4=1.
Para la generación de un tren de pulsos se utilizará el temporizador
dos de los tres de que dispone el PIC. Este es el único temporizador
que utiliza el modulo PWM, el CCP1 correspondiente al módulo PWM 1. Este módulo tiene las siguientes características:
Ocho bits de resolución valores [0..256]. Dispone de tres Prescalers(28) [1,4,16].
Esta familia de microcontroladores sólo pueden utilizar el
temporizador dos para el módulo PWM de manera que aunque disponga de dos módulos PWM y se puedan activar los dos
simultáneamente sólo se podrá obtener una frecuencia que tendrá que ser la misma para las dos modulaciones, pudiendo variar la
anchura de pulso “duty cicle” de cada señal independientemente. Esta
limitación no es un problema para el funcionamiento de este prototipo ya que se ha utilizado un circuito 555 en configuración
astable para la generación del tren de pulsos. De esta manera utilizando únicamente uno de los módulos PWM del PIC y utilizando
dos de los tres preescaler disponibles se cubrirán todo el rango de frecuencias requerido por el consorcio KM3NeT.
Un ejemplo de uso sería:
FrecuenciaXXXX: Genera un tren de pulsos de frecuencia XXXX medida en Hercios.
Frecuencia0: Apaga el modulo PWM y deja la salida del pin C2 ha estado bajo.
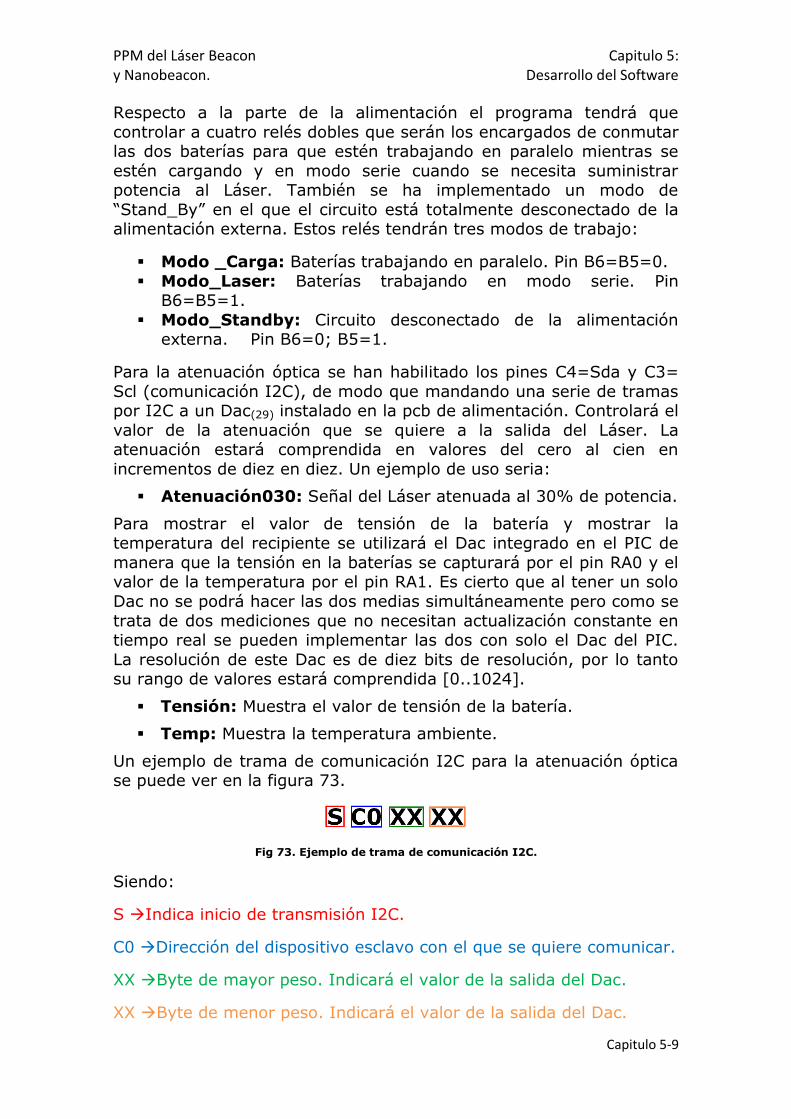
PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-9
Respecto a la parte de la alimentación el programa tendrá que
controlar a cuatro relés dobles que serán los encargados de conmutar las dos baterías para que estén trabajando en paralelo mientras se
estén cargando y en modo serie cuando se necesita suministrar potencia al Láser. También se ha implementado un modo de
“Stand_By” en el que el circuito está totalmente desconectado de la alimentación externa. Estos relés tendrán tres modos de trabajo:
Modo _Carga: Baterías trabajando en paralelo. Pin B6=B5=0.
Modo_Laser: Baterías trabajando en modo serie. Pin B6=B5=1.
Modo_Standby: Circuito desconectado de la alimentación externa. Pin B6=0; B5=1.
Para la atenuación óptica se han habilitado los pines C4=Sda y C3=
Scl (comunicación I2C), de modo que mandando una serie de tramas por I2C a un Dac(29) instalado en la pcb de alimentación. Controlará el
valor de la atenuación que se quiere a la salida del Láser. La atenuación estará comprendida en valores del cero al cien en
incrementos de diez en diez. Un ejemplo de uso seria:
Atenuación030: Señal del Láser atenuada al 30% de potencia.
Para mostrar el valor de tensión de la batería y mostrar la temperatura del recipiente se utilizará el Dac integrado en el PIC de
manera que la tensión en la baterías se capturará por el pin RA0 y el valor de la temperatura por el pin RA1. Es cierto que al tener un solo
Dac no se podrá hacer las dos medias simultáneamente pero como se
trata de dos mediciones que no necesitan actualización constante en tiempo real se pueden implementar las dos con solo el Dac del PIC.
La resolución de este Dac es de diez bits de resolución, por lo tanto su rango de valores estará comprendida [0..1024].
Tensión: Muestra el valor de tensión de la batería.
Temp: Muestra la temperatura ambiente.
Un ejemplo de trama de comunicación I2C para la atenuación óptica se puede ver en la figura 73.
Fig 73. Ejemplo de trama de comunicación I2C.
Siendo:
S Indica inicio de transmisión I2C.
C0 Dirección del dispositivo esclavo con el que se quiere comunicar.
XX Byte de mayor peso. Indicará el valor de la salida del Dac.
XX Byte de menor peso. Indicará el valor de la salida del Dac.
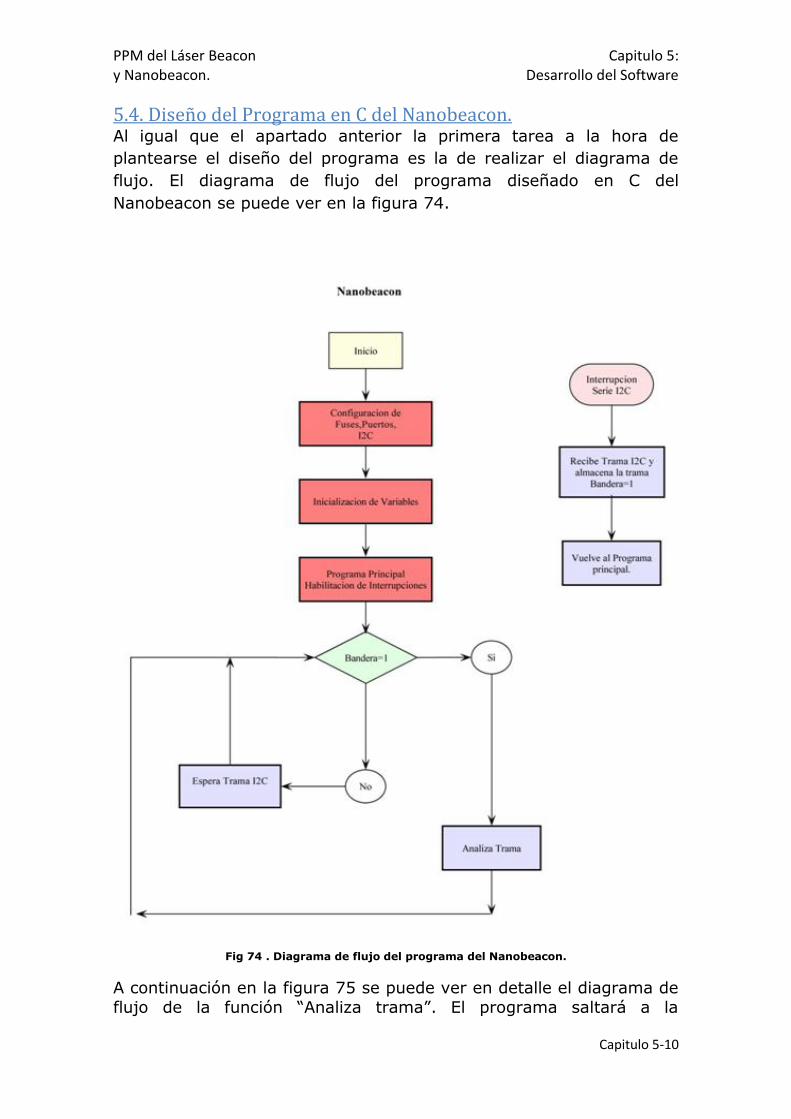
PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-10
5.4. Diseño del Programa en C del Nanobeacon. Al igual que el apartado anterior la primera tarea a la hora de
plantearse el diseño del programa es la de realizar el diagrama de
flujo. El diagrama de flujo del programa diseñado en C del
Nanobeacon se puede ver en la figura 74.
Fig 74 . Diagrama de flujo del programa del Nanobeacon.
A continuación en la figura 75 se puede ver en detalle el diagrama de
flujo de la función “Analiza trama”. El programa saltará a la
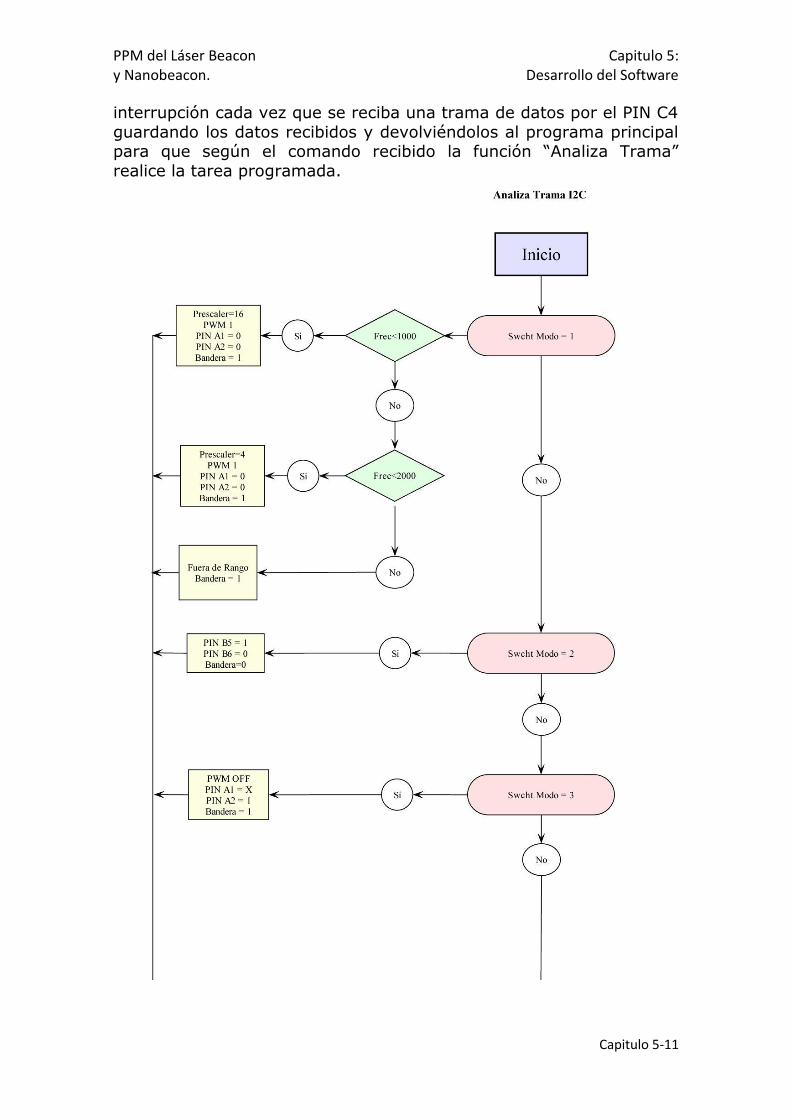
PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-11
interrupción cada vez que se reciba una trama de datos por el PIN C4
guardando los datos recibidos y devolviéndolos al programa principal para que según el comando recibido la función “Analiza Trama”
realice la tarea programada.
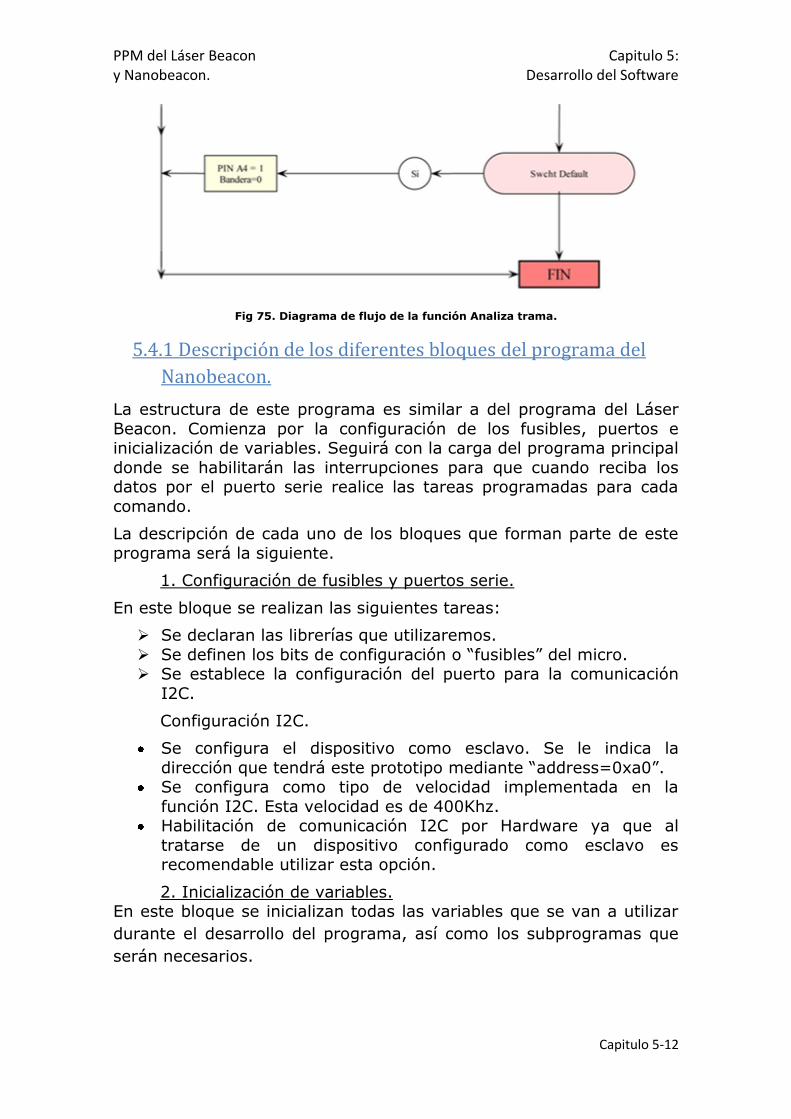
PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-12
Fig 75. Diagrama de flujo de la función Analiza trama.
5.4.1 Descripción de los diferentes bloques del programa del
Nanobeacon.
La estructura de este programa es similar a del programa del Láser
Beacon. Comienza por la configuración de los fusibles, puertos e inicialización de variables. Seguirá con la carga del programa principal
donde se habilitarán las interrupciones para que cuando reciba los datos por el puerto serie realice las tareas programadas para cada
comando.
La descripción de cada uno de los bloques que forman parte de este
programa será la siguiente.
1. Configuración de fusibles y puertos serie.
En este bloque se realizan las siguientes tareas:
Se declaran las librerías que utilizaremos.
Se definen los bits de configuración o “fusibles” del micro. Se establece la configuración del puerto para la comunicación
I2C.
Configuración I2C.
Se configura el dispositivo como esclavo. Se le indica la
dirección que tendrá este prototipo mediante “address=0xa0”. Se configura como tipo de velocidad implementada en la
función I2C. Esta velocidad es de 400Khz. Habilitación de comunicación I2C por Hardware ya que al
tratarse de un dispositivo configurado como esclavo es recomendable utilizar esta opción.
2. Inicialización de variables. En este bloque se inicializan todas las variables que se van a utilizar
durante el desarrollo del programa, así como los subprogramas que
serán necesarios.

PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-13
3. Interrupción SSP “I2C”.
Cada vez que se reciba un dato por el pin RC4 saltará esta
interrupción. En este bloque se almacenaran los datos recibos en la
trama de comunicación I2C en las variables creadas para ello, para
una vez almacenadas volver al programa principal en el mismo punto
en el que se encontraba antes de saltar la interrupción serie.
4. Programa Principal.
En este bloque es donde siempre se encontrará el microcontrolador
esperando a recibir un dato por el puerto serie. En él se configurarán los temporizadores, comparadores, módulos PWM y demás si fuese
necesario. Además de habilitarse las interrupciones que se vayan a utilizar después. Una vez recibida la trama de comunicación I2C y
guardados los datos en las variables creadas para ello, el micro volverá al programa principal para comprobar que se cumple la
condición de dato recibido, ejecutando seguidamente la función
“Analiza Trama” y actuando según el valor del comando recibido de la manera predefina en el código programado.
Una vez entre en la función “Analiza Trama” en este bloque se deberá verificar:
En primer lugar que el primer byte(30) recibido, que es la dirección del dispositivo esclavo, corresponde con la del
prototipo. En caso contrario no se podrá establecer la comunicación.
Después comprobará que el segundo byte recibido está dentro de los modos preconfigurados en el programa. De no ser así se
pasara al modo por defecto del mismo, apagando el booster y los módulos PWM y por lo tanto no emitiendo ningún tipo de
señal. El tercer y cuarto byte se guardarán en dos variables que
dependiendo del modo en el que se esté tendrán una función u
otra.
A continuación se va describir más detallamente los modos de trabajo
del programa.
Modo 01: “Modo Frecuencia”. Genera un tren de pulsos utilizado como trigger interno, la frecuencia de señal será la indicada por la
unión del tercer y cuarto byte recibido, siendo el tercer byte el mayor peso y cuarto el de menor peso. La frecuencia estará comprendida
entre doscientos cincuenta y dos mil Hercios. Por seguridad se ha implementado en el programa que cada vez que se modifique la
frecuencia del modulo PWM 1, el modulo PWM 2 se desactive, ya que
se ha comprobado que, cuando se está trabajando con frecuencias bajas con un duty concreto al pasar a frecuencias más altas este
valor de duty se incrementa considerablemente. De no limitarse y

PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-14
aumentar el duty a valores superiores al 82% se dañaría toda la
circuitería conectada a la salida del booster.
Modo 02: “Modo Duty”. Generará un tren de pulsos de frecuencia
idéntica a la del modulo PWM1, pero podrá modificar el duty de esta
señal según se indique en el tercer byte recibido. Los valores de este duty estarán comprendidos entre cero y doscientos cincuenta y cinco.
Se ha limitado el duty máximo a 82% para no dañar el circuito del pulsador.
Modo 03: “Modo Trigger Externo”. Habilitará como señal de trigger la
señal recibida del exterior. Se puede utilizar esta señal para controlar el booster.
Modo Default: “Modo sin Emisión”. En este modo se apagarán los dos módulos PWM y se pondrá a estado alto el pin RA2. De esta
forma no se emitirá ningún tipo de señal.
Un ejemplo de trama valida recibida se puede ver en la figura 76.
Fig 76. Ejemplo de trama recibida.
Siendo:
S Indica incio de transmisión I2C.
A0 Dirección del dispositivo esclavo con el que se quiere comunicar.
01 Modo al que se quiere acceder.
03 Byte de mayor peso que indicará la frecuencia.
E8 Byte de menor peso que indicará la frecuencia.
Así pues esta trama nos indicara que se quiere entrar en el modo 01 para generar un tren de pulso de frecuencia 0x03E816 = 1000
Hercios.
PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-15
5.5. Simulación del software programado.
Una vez creado el programa un paso muy importante antes de la programación real del PIC es la simulación del código programado.
De este modo conseguimos eliminar la gran mayoría de los fallos lógicos, no de programación, ya que el compilador sólo nos asegura
que el programa está bien estructurado y escrito correctamente pero no que vaya a cumplir las funciones requeridas por el diseño.
Para la simulación se va a utilizar el programa Proteus la versión 7.6 creado por Labcenter Electronics. Proteus es una completa
herramienta para el diseño de circuitos electrónicos. Se divide en dos programas, ARES y ISIS.
ARES es un programa que se encarga de ayudarnos a diseñar la placa definitiva. En él podremos trazar las pistas entre los componentes y
obtener los archivos necesarios para la fabricación de la placa de
circuito impreso. Esta parte del Proteus no se ha utilizado en la realización del diseño ya que para la fabricación de la placa de
circuito impreso se ha utilizado el software Orcad como se ha visto en el capitulo cuatro.
Con el software ISIS tendremos un generador de circuitos reales de forma que podremos comprobar su funcionamiento casi al 100% con
el inconveniente que este software no es muy fiable con el apartado eléctrico. Así puede darse el caso de que un componente que tenga
un rango de tensiones de entrada comprendido [0..5] voltios le llegue una señal de 12 voltios y funcione correctamente, y el programa no
nos avise. Este es un concepto a tener en cuenta a la hora de realizar simulaciones con este software.
A continuación podemos ver en la figura 77 una captura de pantalla del software ISIS del Proteus 7.6. Se muestra la simulación de la
comunicación I2C. Se ha utilizado dos PIC modelo 16F886 de manera
que uno actué como maestro mandando datos por I2C y otro como esclavo para que los reciba y los muestre por RS232. Se ha utilizado
el Virtual Terminal de Proteus que es un instrumento virtual que intenta emular al Hyperterminal de Windows. También se ha utilizado
un componente del software ISIS llamado “COMPIM” que crea una conexión virtual entre el puerto creado con el software gratuito
“Virtual Serial Port Emulator” y dicho componente. De manera que se puede interactuar mediante el Hyperterminal de Windows con el PIC
Maestro simulado por el ISIS. Esta combinación de software reduce totalmente la necesidad de disponer de componentes físicamente ya
que se pueden programar y depurar mediante simulación con el software ISIS.

PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-16
[27]Fig 77. Ejemplo de Simulación de Comunicación I2C.
A continuación observamos la comunicación más detalladamente.
[27]Fig 78. Trama I2C enviada.
En la figura 78 vemos la trama de bits enviada por comunicación I2C
el PIC configurado como maestro y como es correctamente recibida por el PIC configurado como esclavo, siendo :
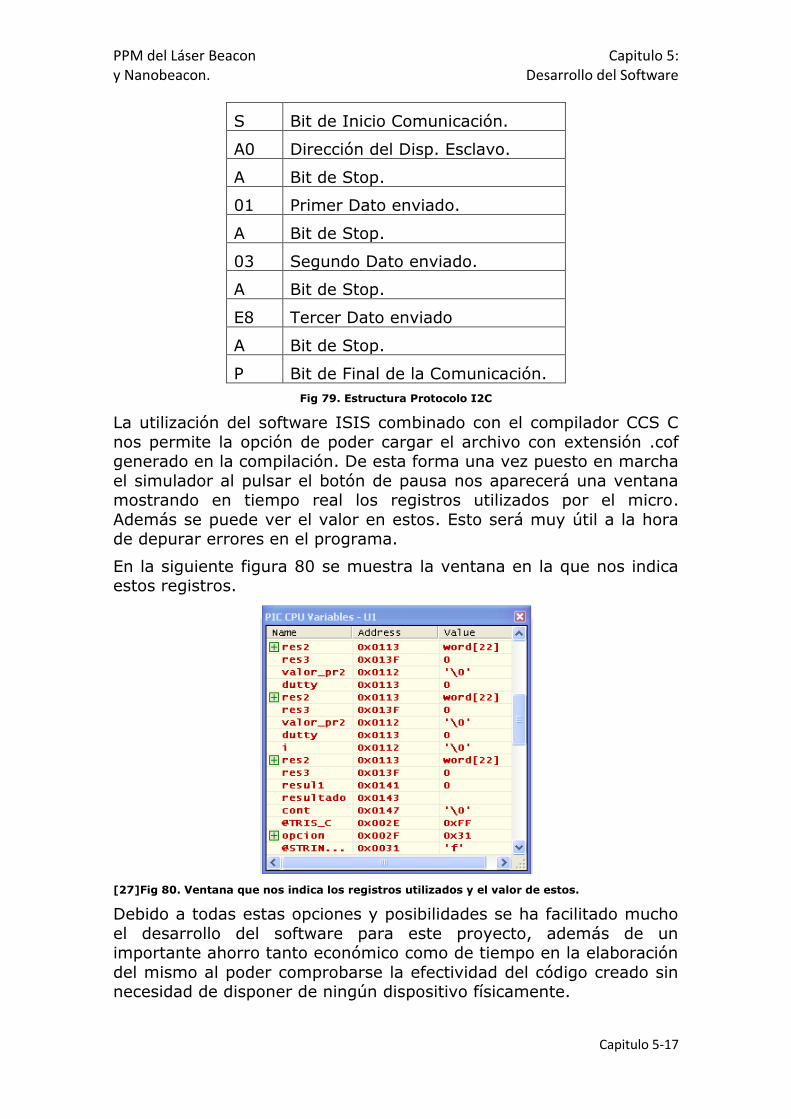
PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-17
S Bit de Inicio Comunicación.
A0 Dirección del Disp. Esclavo.
A Bit de Stop.
01 Primer Dato enviado.
A Bit de Stop.
03 Segundo Dato enviado.
A Bit de Stop.
E8 Tercer Dato enviado
A Bit de Stop.
P Bit de Final de la Comunicación.
Fig 79. Estructura Protocolo I2C
La utilización del software ISIS combinado con el compilador CCS C
nos permite la opción de poder cargar el archivo con extensión .cof generado en la compilación. De esta forma una vez puesto en marcha
el simulador al pulsar el botón de pausa nos aparecerá una ventana mostrando en tiempo real los registros utilizados por el micro.
Además se puede ver el valor en estos. Esto será muy útil a la hora de depurar errores en el programa.
En la siguiente figura 80 se muestra la ventana en la que nos indica estos registros.
[27]Fig 80. Ventana que nos indica los registros utilizados y el valor de estos.
Debido a todas estas opciones y posibilidades se ha facilitado mucho
el desarrollo del software para este proyecto, además de un importante ahorro tanto económico como de tiempo en la elaboración
del mismo al poder comprobarse la efectividad del código creado sin necesidad de disponer de ningún dispositivo físicamente.
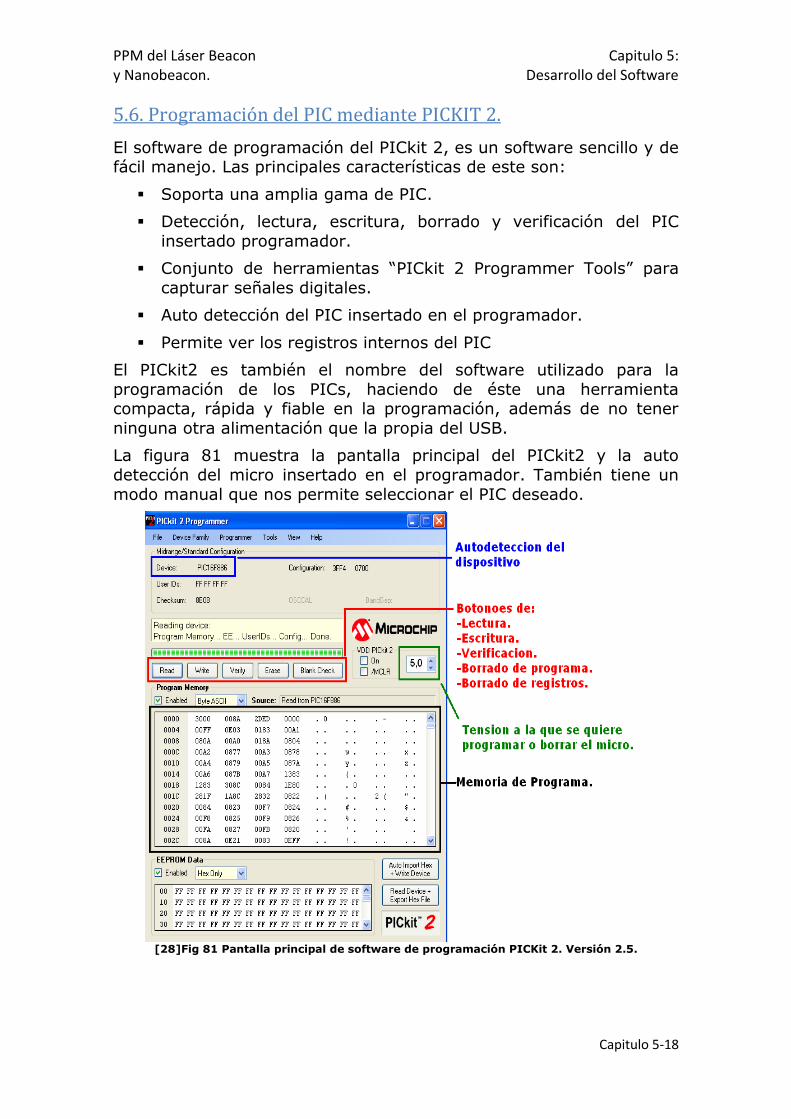
PPM del Láser Beacon Capitulo 5: y Nanobeacon. Desarrollo del Software
Capitulo 5-18
5.6. Programación del PIC mediante PICKIT 2.
El software de programación del PICkit 2, es un software sencillo y de fácil manejo. Las principales características de este son:
Soporta una amplia gama de PIC.
Detección, lectura, escritura, borrado y verificación del PIC
insertado programador.
Conjunto de herramientas “PICkit 2 Programmer Tools” para
capturar señales digitales.
Auto detección del PIC insertado en el programador.
Permite ver los registros internos del PIC
El PICkit2 es también el nombre del software utilizado para la
programación de los PICs, haciendo de éste una herramienta compacta, rápida y fiable en la programación, además de no tener
ninguna otra alimentación que la propia del USB.
La figura 81 muestra la pantalla principal del PICkit2 y la auto
detección del micro insertado en el programador. También tiene un
modo manual que nos permite seleccionar el PIC deseado.
[28]Fig 81 Pantalla principal de software de programación PICKit 2. Versión 2.5.
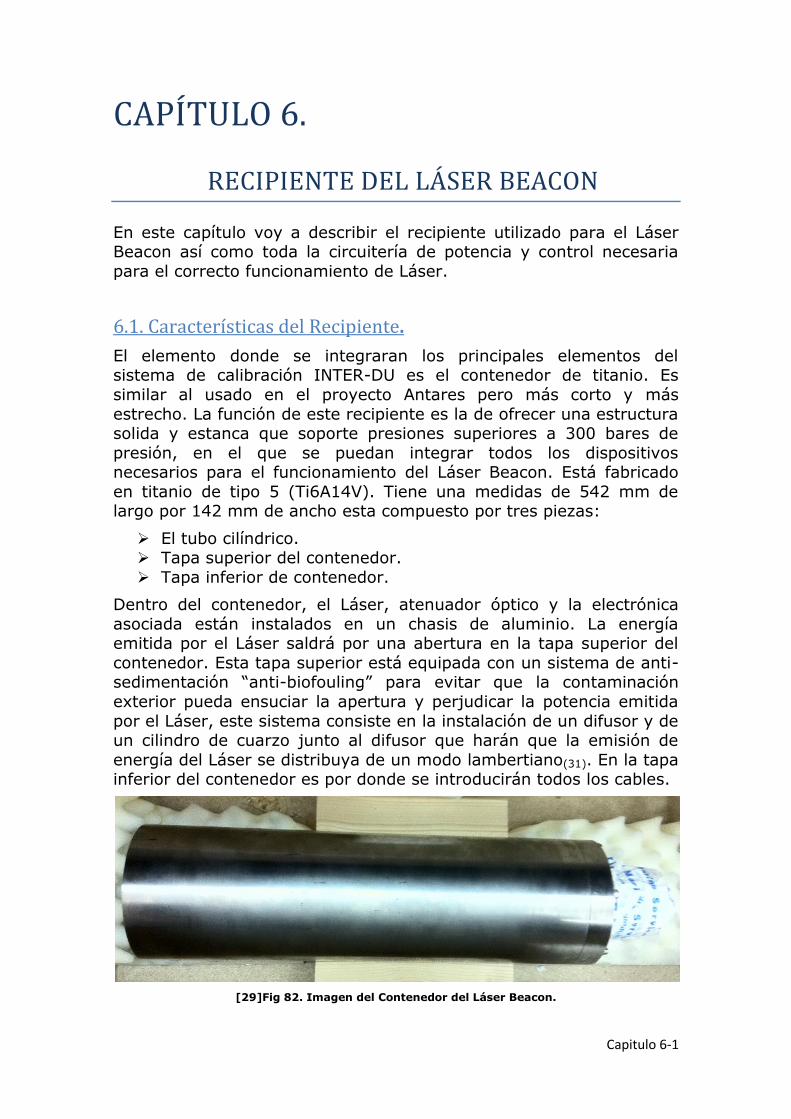
Capitulo 6-1
En este capítulo voy a describir el recipiente utilizado para el Láser Beacon así como toda la circuitería de potencia y control necesaria
para el correcto funcionamiento de Láser.
6.1. Características del Recipiente.
El elemento donde se integraran los principales elementos del sistema de calibración INTER-DU es el contenedor de titanio. Es
similar al usado en el proyecto Antares pero más corto y más
estrecho. La función de este recipiente es la de ofrecer una estructura solida y estanca que soporte presiones superiores a 300 bares de
presión, en el que se puedan integrar todos los dispositivos necesarios para el funcionamiento del Láser Beacon. Está fabricado
en titanio de tipo 5 (Ti6A14V). Tiene una medidas de 542 mm de largo por 142 mm de ancho esta compuesto por tres piezas:
El tubo cilíndrico. Tapa superior del contenedor.
Tapa inferior de contenedor.
Dentro del contenedor, el Láser, atenuador óptico y la electrónica
asociada están instalados en un chasis de aluminio. La energía emitida por el Láser saldrá por una abertura en la tapa superior del
contenedor. Esta tapa superior está equipada con un sistema de anti-sedimentación “anti-biofouling” para evitar que la contaminación
exterior pueda ensuciar la apertura y perjudicar la potencia emitida
por el Láser, este sistema consiste en la instalación de un difusor y de un cilindro de cuarzo junto al difusor que harán que la emisión de
energía del Láser se distribuya de un modo lambertiano(31). En la tapa inferior del contenedor es por donde se introducirán todos los cables.
[29]Fig 82. Imagen del Contenedor del Láser Beacon.
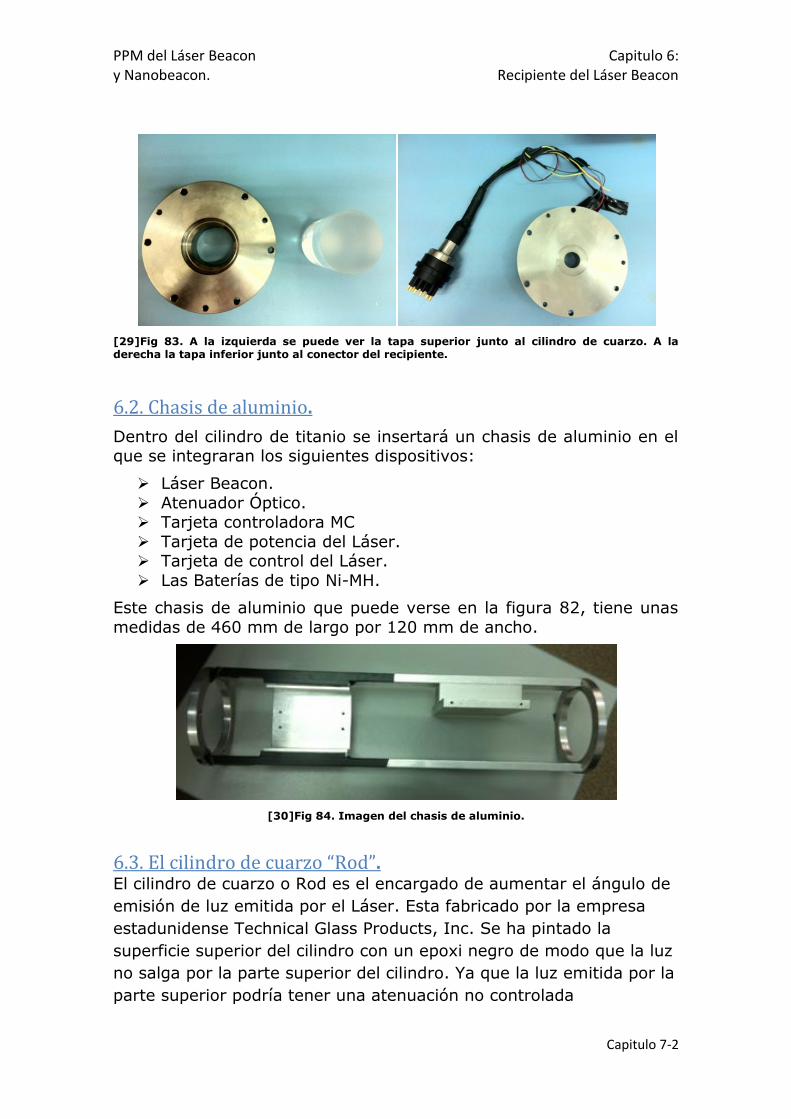
PPM del Láser Beacon Capitulo 6: y Nanobeacon. Recipiente del Láser Beacon
Capitulo 7-2
[29]Fig 83. A la izquierda se puede ver la tapa superior junto al cilindro de cuarzo. A la derecha la tapa inferior junto al conector del recipiente.
6.2. Chasis de aluminio.
Dentro del cilindro de titanio se insertará un chasis de aluminio en el que se integraran los siguientes dispositivos:
Láser Beacon.
Atenuador Óptico. Tarjeta controladora MC
Tarjeta de potencia del Láser. Tarjeta de control del Láser.
Las Baterías de tipo Ni-MH.
Este chasis de aluminio que puede verse en la figura 82, tiene unas
medidas de 460 mm de largo por 120 mm de ancho.
[30]Fig 84. Imagen del chasis de aluminio.
6.3. El cilindro de cuarzo “Rod”. El cilindro de cuarzo o Rod es el encargado de aumentar el ángulo de
emisión de luz emitida por el Láser. Esta fabricado por la empresa
estadunidense Technical Glass Products, Inc. Se ha pintado la
superficie superior del cilindro con un epoxi negro de modo que la luz
no salga por la parte superior del cilindro. Ya que la luz emitida por la
parte superior podría tener una atenuación no controlada

PPM del Láser Beacon Capitulo 6: y Nanobeacon. Recipiente del Láser Beacon
Capitulo 7-3
dependiendo de la suciedad del medio y el tiempo en el que este
instalado en el fondo marino.
[29]Fig 85. Imagen del Rod con la parte superior pintada.
6.4. Conector del recipiente. Para la conexión con el recipiente con la caja de conexión “junction
Box” se utilizan un conector de titanio de la empresa MacArtney , el
diagrama de pines de conector se muestra en la figura X.
[3]Fig 86. Conector de titanio del recipiente del Láser Beacon.
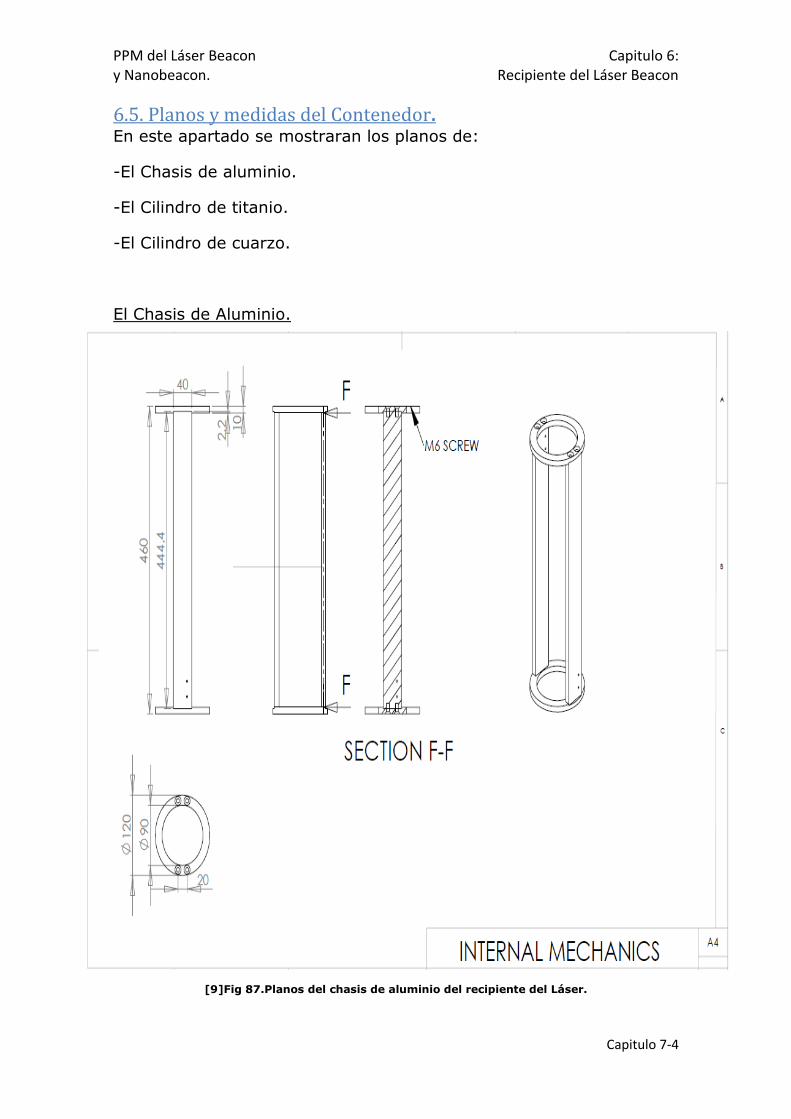
PPM del Láser Beacon Capitulo 6: y Nanobeacon. Recipiente del Láser Beacon
Capitulo 7-4
6.5. Planos y medidas del Contenedor. En este apartado se mostraran los planos de:
-El Chasis de aluminio.
-El Cilindro de titanio.
-El Cilindro de cuarzo.
El Chasis de Aluminio.
[9]Fig 87.Planos del chasis de aluminio del recipiente del Láser.
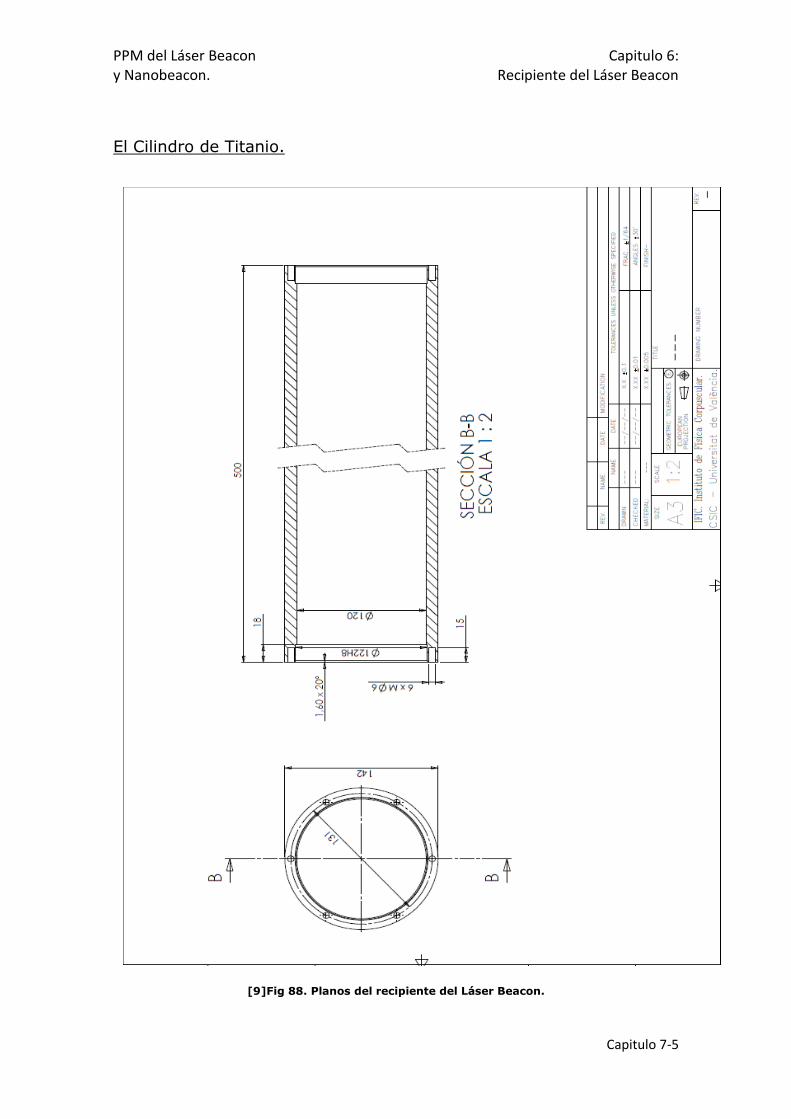
PPM del Láser Beacon Capitulo 6: y Nanobeacon. Recipiente del Láser Beacon
Capitulo 7-5
El Cilindro de Titanio.
[9]Fig 88. Planos del recipiente del Láser Beacon.

PPM del Láser Beacon Capitulo 6: y Nanobeacon. Recipiente del Láser Beacon
Capitulo 7-6
[9] Fig 89. Planos de Tapa superior del Recipiente de Titanio y Cilindro de Cuarzo .
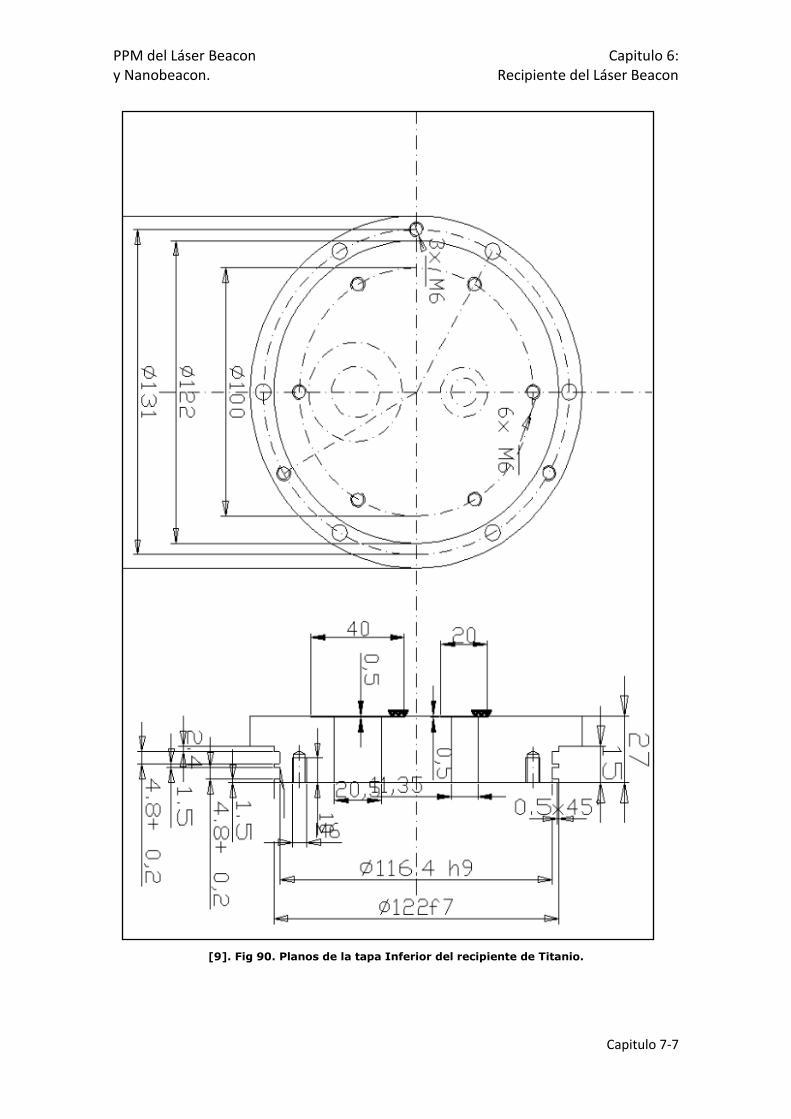
PPM del Láser Beacon Capitulo 6: y Nanobeacon. Recipiente del Láser Beacon
Capitulo 7-7
[9]. Fig 90. Planos de la tapa Inferior del recipiente de Titanio.

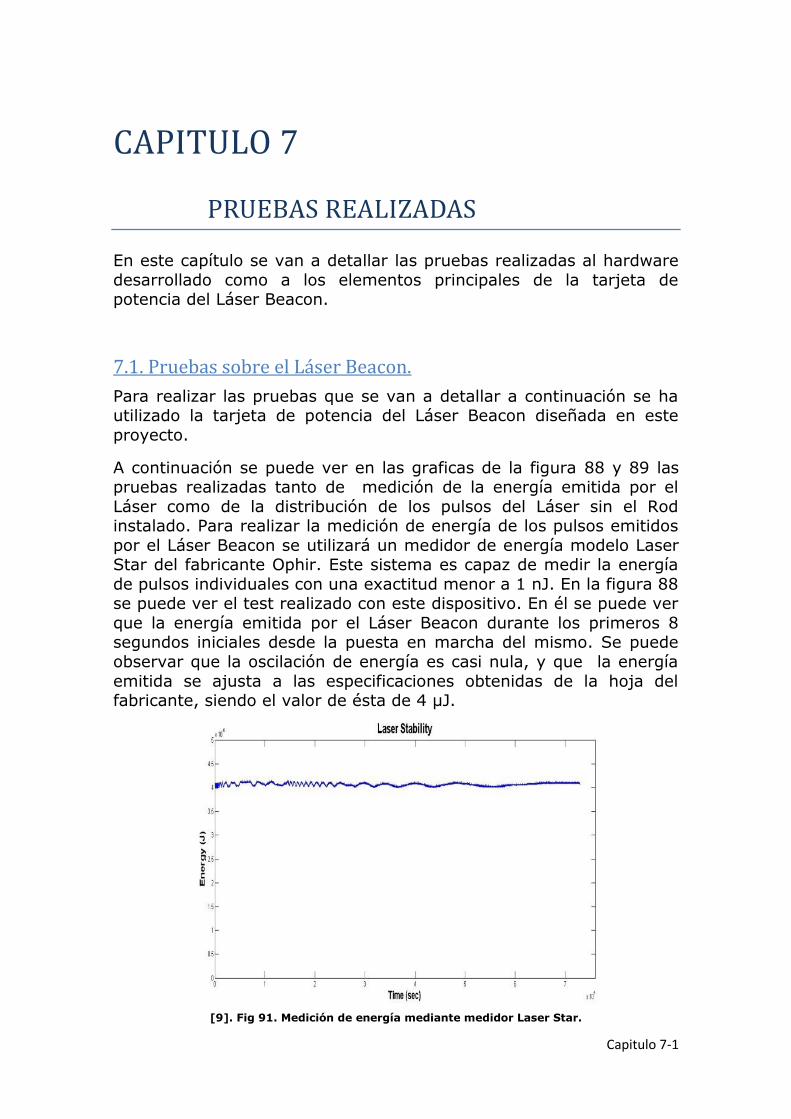
Capitulo 7-1
En este capítulo se van a detallar las pruebas realizadas al hardware
desarrollado como a los elementos principales de la tarjeta de potencia del Láser Beacon.
7.1. Pruebas sobre el Láser Beacon.
Para realizar las pruebas que se van a detallar a continuación se ha utilizado la tarjeta de potencia del Láser Beacon diseñada en este
proyecto.
A continuación se puede ver en las graficas de la figura 88 y 89 las pruebas realizadas tanto de medición de la energía emitida por el
Láser como de la distribución de los pulsos del Láser sin el Rod instalado. Para realizar la medición de energía de los pulsos emitidos
por el Láser Beacon se utilizará un medidor de energía modelo Laser Star del fabricante Ophir. Este sistema es capaz de medir la energía
de pulsos individuales con una exactitud menor a 1 nJ. En la figura 88 se puede ver el test realizado con este dispositivo. En él se puede ver
que la energía emitida por el Láser Beacon durante los primeros 8 segundos iniciales desde la puesta en marcha del mismo. Se puede
observar que la oscilación de energía es casi nula, y que la energía
emitida se ajusta a las especificaciones obtenidas de la hoja del fabricante, siendo el valor de ésta de 4 μJ.
[9]. Fig 91. Medición de energía mediante medidor Laser Star.
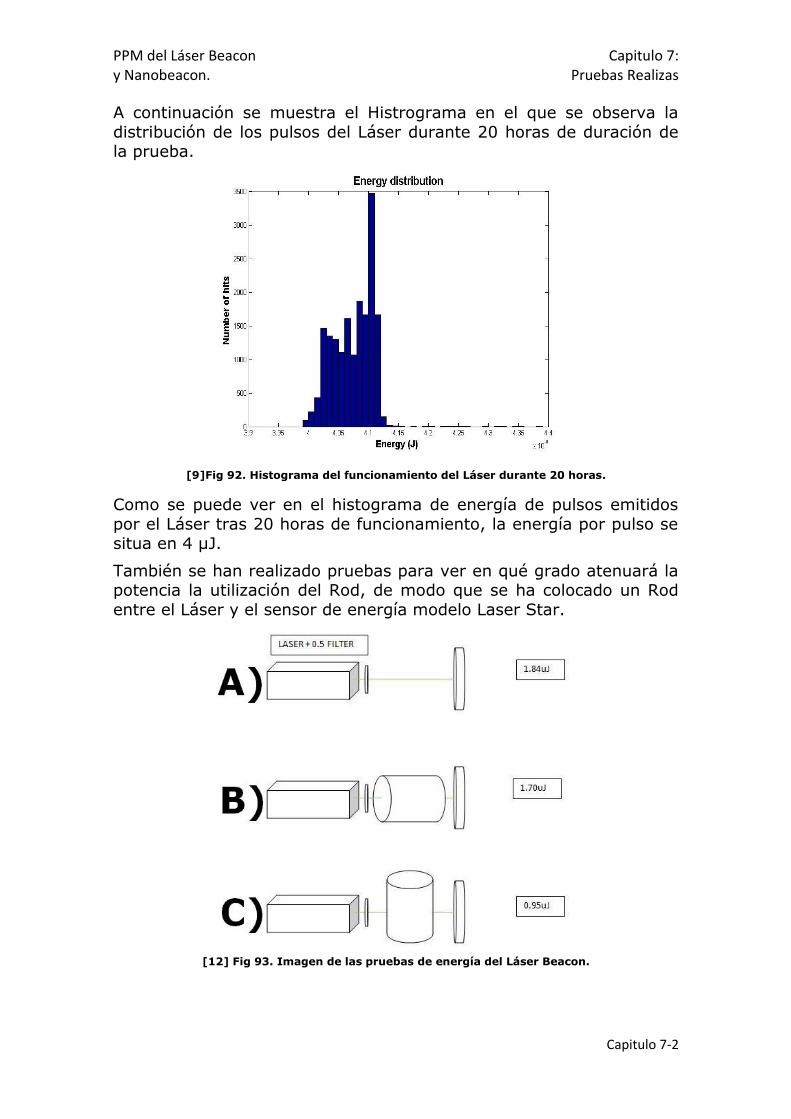
PPM del Láser Beacon Capitulo 7: y Nanobeacon. Pruebas Realizas
Capitulo 7-2
A continuación se muestra el Histrograma en el que se observa la
distribución de los pulsos del Láser durante 20 horas de duración de la prueba.
[9]Fig 92. Histograma del funcionamiento del Láser durante 20 horas.
Como se puede ver en el histograma de energía de pulsos emitidos
por el Láser tras 20 horas de funcionamiento, la energía por pulso se situa en 4 μJ.
También se han realizado pruebas para ver en qué grado atenuará la potencia la utilización del Rod, de modo que se ha colocado un Rod
entre el Láser y el sensor de energía modelo Laser Star.
[12] Fig 93. Imagen de las pruebas de energía del Láser Beacon.

PPM del Láser Beacon Capitulo 7: y Nanobeacon. Pruebas Realizas
Capitulo 7-3
Se le ha instalado un filtro óptico de factor 0.5 que atenuará la
potencia de emisión del Láser a la mitad para poder adaptar la potencia de emisión del Láser Beacon al rango del medidor de energía
ya que este modelo de medidor de energía trabaja mejor con un rango comprendido entre 0 y 2 uJ.
Como se puede observar por los resultados obtenidos en la figura 90. Colocando de manera correcta el Rod no atenuará prácticamente. De
este modo se conseguirá un ángulo de emisión mayor, con lo que supondrá un gran ahorro económico al poder abarcar más área para
calibrar más líneas de detección.
7.2. Pruebas Realizadas al Láser Beacon con el ROD instalado.
Mediante la utilización de un dispositivo mecánico que nos permite
orientar el Láser Beacon y utilizando un medidor de energía del
fabricante NewPort Modelo Multi-function Optical Meter 1835C, para la realización de estas pruebas se ha mantenido la configuración de la
señal de trigger de un 1Khz. Además se ha utilizado un difusor modelo 48010 del fabricante ORIEL. Este difusor irá instalado después
del atenuador óptico y antes del Rod. Este distribuirá el haz de luz del láser de un modo lambertiano. Es decir la distribución de luz seguirá
una distribución de coseno. En la figura 91 se puede ver los elementos utilizados para la realización de esta prueba.
[9]. Fig 94. Distribución de elementos para la realización de la prueba.
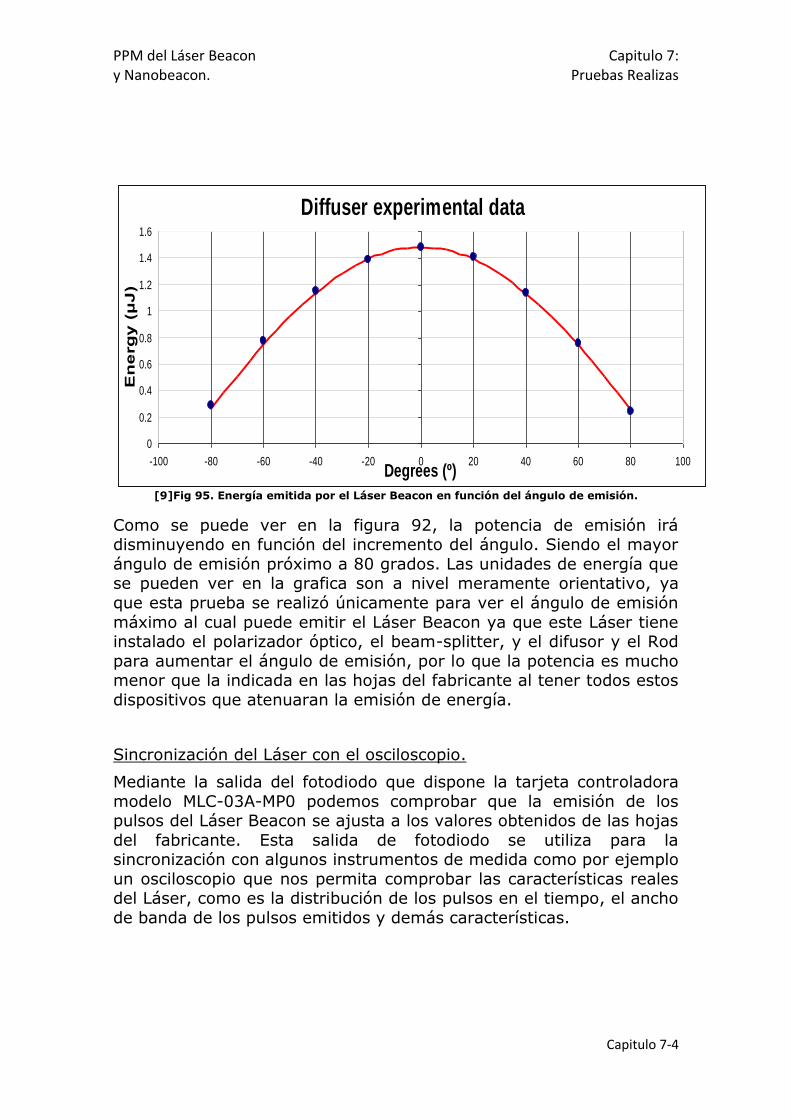
PPM del Láser Beacon Capitulo 7: y Nanobeacon. Pruebas Realizas
Capitulo 7-4
[9]Fig 95. Energía emitida por el Láser Beacon en función del ángulo de emisión.
Como se puede ver en la figura 92, la potencia de emisión irá disminuyendo en función del incremento del ángulo. Siendo el mayor
ángulo de emisión próximo a 80 grados. Las unidades de energía que se pueden ver en la grafica son a nivel meramente orientativo, ya
que esta prueba se realizó únicamente para ver el ángulo de emisión
máximo al cual puede emitir el Láser Beacon ya que este Láser tiene instalado el polarizador óptico, el beam-splitter, y el difusor y el Rod
para aumentar el ángulo de emisión, por lo que la potencia es mucho menor que la indicada en las hojas del fabricante al tener todos estos
dispositivos que atenuaran la emisión de energía.
Sincronización del Láser con el osciloscopio.
Mediante la salida del fotodiodo que dispone la tarjeta controladora
modelo MLC-03A-MP0 podemos comprobar que la emisión de los pulsos del Láser Beacon se ajusta a los valores obtenidos de las hojas
del fabricante. Esta salida de fotodiodo se utiliza para la sincronización con algunos instrumentos de medida como por ejemplo
un osciloscopio que nos permita comprobar las características reales del Láser, como es la distribución de los pulsos en el tiempo, el ancho
de banda de los pulsos emitidos y demás características.
Diffuser experimental data
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
-100 -80 -60 -40 -20 0 20 40 60 80 100Degrees (º)
En
erg
y (
μJ
)

PPM del Láser Beacon Capitulo 7: y Nanobeacon. Pruebas Realizas
Capitulo 7-5
[24]. Fig 96. Medida del Jitter del Láser.
En la figura 93 se puede ver el resultado de esta sincronización de la salida del fotodiodo de la tarjeta controladora con un fotodiodo
externo mediante la utilización de un osciloscopio. También se puede ver que el retraso medio desde que se emite el pulso en la tarjeta
controladora MLC-03A-MP0 hasta que la energía es recibida por el fotodiodo se produce un retraso de 4,171 0,433 ns. Siendo este
valor de 4,171 ns el retraso medio o delay parte no importante ya
que depende del cable utilizado y el valor de 0,433 ns la variación
en el tiempo o jitter respecto al retraso de la señal. En el Histograma
de la figura 93 se puede observar que el jitter de la señal es un valor muy pequeño y está dentro de las especificaciones del proyecto. Para
las pruebas realizadas hay que tener en cuenta que el retraso medido de 4,171 ns no depende únicamente de las características de la
tarjeta depende de la longitud del cable utilizado en las medidas, siendo este retraso constante mientras que el valor que oscilara será
el jitter con un valor de ( 0,433) nano segundos respecto al retraso
de la señal.

PPM del Láser Beacon Capitulo 7: y Nanobeacon. Pruebas Realizas
Capitulo 7-6
7.2. Pruebas Realizadas al Atenuador Óptico
En la figura 94 se pude ver una grafica mostrando la energía emitida por el Láser en función de la tensión aplicada al polarizador.
[9]Fig 97. Curva de Potencia emitida frente a Tensión Aplicada al Atenuador Optico.
Como se demuestra en la gráfica de la figura 93, la mayor atenuación
de energía emitida por el Láser no se ofrece cuando se le aplica la tensión máxima al Atenuador Óptico si no cuando le estamos
aplicando una tensión de 5 V.
7.3. Diodos Led instalados en el Nanobeacon.
Actualmente en el mercado podemos encontrar multitud de modelos
de diodos Led, ya que es un dispositivo que cada día se utiliza más en multitud de aplicaciones. Para la elección del modelo de diodo Led
instalado en la tarjeta de emisión que ira instalada en el Nanobeacon se ha buscado tener un equilibrio entre las principales características
de los diodos analizados, las más importantes son:
Debe tener un rise-time(32) lo más pequeño posible. La energía emitida tiene que ser lo más alta posible.
La capacidad parasitaria del Led debe ser pequeña.
En la figura 95 se muestra la gráfica comparativa de los modelos de diodos Led analizados, en el que se ve la energía emitida en función
del rise time.

PPM del Láser Beacon Capitulo 7: y Nanobeacon. Pruebas Realizas
Capitulo 7-7
0 5 10 15 20 25 30
0
0.05
0.1
0.15
0.2
Tiempo (ns)
ener
gia
(UA)
Comparativa Modelos de LEDS
cb11 - 3.76
cb14 - 4.16
cb25 - 3.76
cb26 - 3.56
cb30 - 3.36
cb35 - 4.06
Kinbright - 6.54
NSPB520 - 3.87
NSPB500 - 4.75
LB17y - 3.76
LB17x - 3.76
AB87 - 3.56
[8]Fig 98. Grafica comparativa del rise-time de los diodos analizados.
El modelo de diodo LB17 puede emitir energía estando orientado verticalmente (LB17y) como horizontalmente (LB17x) por eso se han
incluido en el estudio los dos modos de emisión. A continuación se ve
una tabla en la que se muestran los valores obtenidos de la gráfica de la figura 96. En la elección del diodo de tipo Led para el circuito
Pulser que se instalara en el Nanobeacon se tendrá en cuenta que :
El pulso tenga la mayor amplitud de energía posible.
Que tenga una homogeneidad en la energía emitida. El pulso tenga el rise-time o tiempo de subida sea lo más
pequeño posible, lo que nos asegurara una respuesta rápida.
A continuación podemos ver una tabla con las características
obtenidas de la graficas de la figura 96.
LED Rt Gau Rt Wei FWHM Gau FWHM Wei Int(3ns) Int(2ns) Int(3ns) 20% Int(2ns) 20 %
CB 11 4.22 3.76 5.87 5.94 0.18 0.102 0.12 0.054
CB 25 4.39 3.76 6.12 6.14 0.12 0.065 0.12 0.065
CB 14 4.31 4.16 6.01 6.04 0.18 0.100 0.12 0.057
CB 26 3.94 3.57 5.48 5.45 0.16 0.075 0.16 0.075
CB30 3.85 3.37 5.37 5.45 0.09 0.041 0.092 0.041
CB35 5.19 4.06 7.25 7.63 0.076 0.038 0.076 0.038
King
Bright
7.98 6.54 11.13 11.30 0.10 0.054 0.063 0.030
NSPB5
02
4.60 3.86 6.42 6.54 0.13 0.06 0.13 0.064
NSPB5
00
10.55 4.76 14.70 14.67 0.44 0.24 0.28 0.12
LB17Y 4.23 3.77 5.91 5.95 0.49 0.27 0.31 0.14
LB17X 4.23 3.77 5.91 5.95 0.11 0.06 0.072 0.032
AB87 4.00 3.58 5.58 5.65 0.20 0.11 0.13 0.06
[8] Fig 99. Tabla comparativa de características de los diodos Led analizados.
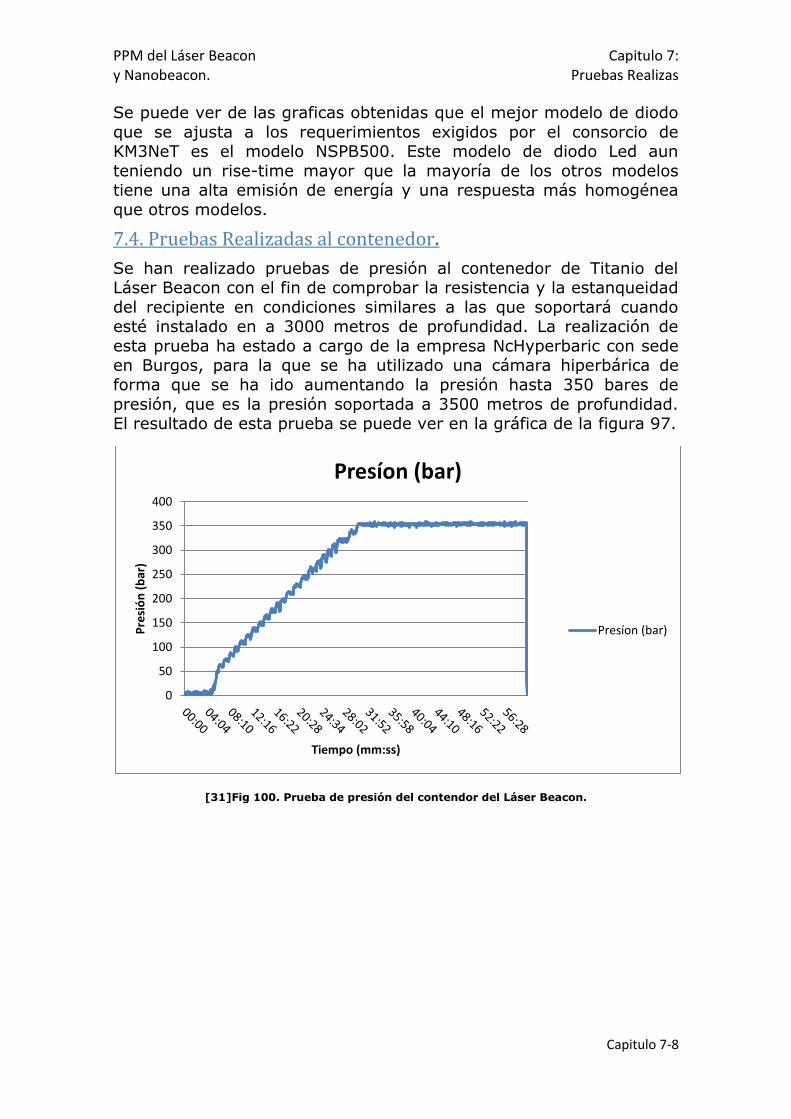
PPM del Láser Beacon Capitulo 7: y Nanobeacon. Pruebas Realizas
Capitulo 7-8
Se puede ver de las graficas obtenidas que el mejor modelo de diodo
que se ajusta a los requerimientos exigidos por el consorcio de KM3NeT es el modelo NSPB500. Este modelo de diodo Led aun
teniendo un rise-time mayor que la mayoría de los otros modelos tiene una alta emisión de energía y una respuesta más homogénea
que otros modelos.
7.4. Pruebas Realizadas al contenedor.
Se han realizado pruebas de presión al contenedor de Titanio del Láser Beacon con el fin de comprobar la resistencia y la estanqueidad
del recipiente en condiciones similares a las que soportará cuando esté instalado en a 3000 metros de profundidad. La realización de
esta prueba ha estado a cargo de la empresa NcHyperbaric con sede en Burgos, para la que se ha utilizado una cámara hiperbárica de
forma que se ha ido aumentando la presión hasta 350 bares de
presión, que es la presión soportada a 3500 metros de profundidad. El resultado de esta prueba se puede ver en la gráfica de la figura 97.
[31]Fig 100. Prueba de presión del contendor del Láser Beacon.
0
50
100
150
200
250
300
350
400
Pre
sió
n (
bar
)
Tiempo (mm:ss)
Presíon (bar)
Presíon (bar)
Capitulo 8-1
8.1. Introducción.
Labview es un software revolucionario que genera entorno de
desarrollo gráfico con funciones integradas para realizar adquisición de datos, control de instrumentos, análisis de medida y
presentaciones de datos. Labview le da la flexibilidad de un potente
ambiente de programación, pero mucho más sencillo que los entornos tradicionales. Este software ofrece entre otras muchas
ventajas:
Es un Lenguaje Desarrollado para Medida, Control y
Automatización.
Entorno de Desarrollo Intuitivo. Fácil Integración con de Instrumentos y Dispositivos de Medida.
Entorno Abierto para Usar con Otras Aplicaciones. Labview simplifica el desarrollo de sistemas y produce un
código reutilizable que se ejecuta a velocidades de código compilado.
Labview puede crear ejecutables autónomos o librerías compartidas para que se puedan llamar desde otros entornos
como Microsoft Visual Basic o Measurement Studio de National Instruments.
8.2. Funciones a realizar en el control del laser Beacon.
Una vez diseñado el software de control del Láser Beacon, se
desarrolla un instrumento virtual mediante el software Labview 10 para el control y test del Láser Beacon. El programa creado en
Labview permitirá al usuario controlar el funcionamiento del Láser Beacon de una manera sencilla, mediante botones y pulsadores como
si se tratara de cualquier dispositivo de medida o generador de
señales que se pueden encontrar en la mayoría de los laboratorios de electrónica. Además de ofrecerle información sobre el nivel de carga
de la batería y la temperatura del recipiente de titanio donde irá instalado el Láser Beacon. Los datos del sensado de las baterías como
de la temperatura se guardarán en un documento compatible con Excel. Las funciones que tendrá que realizar el software generado con
Labview son:

PPM del Láser Beacon Capitulo 8: y Nanobeacon. Diseño del Interface Grafico
Capitulo 8-2
Configurar el modo de trabajo de la tarjeta de potencia del Láser
Beacon vista en el aparatado 5.3.1 del capítulo 5. Además se contara con un modo automático de sensado de nivel
de carga de las baterías. De manera que se podrá modificar en el panel de control generado, el intervalo de tiempo con el que se
realizará el sensado de las baterías.
También se ha implementado la opción de generación de reportes,
de este modo cuando se pulse dicho botón de “generación de reportes” se generara un documento compatible con Excel con la
información de el nivel de carga de la batería como el de la
temperatura sensadas desde el inicio del programa.
El programa se ha dividido en los bloques que aparecen en el diagrama de flujo figura 98.
Fig 101. Diagrama de flujo del programada en Labview.
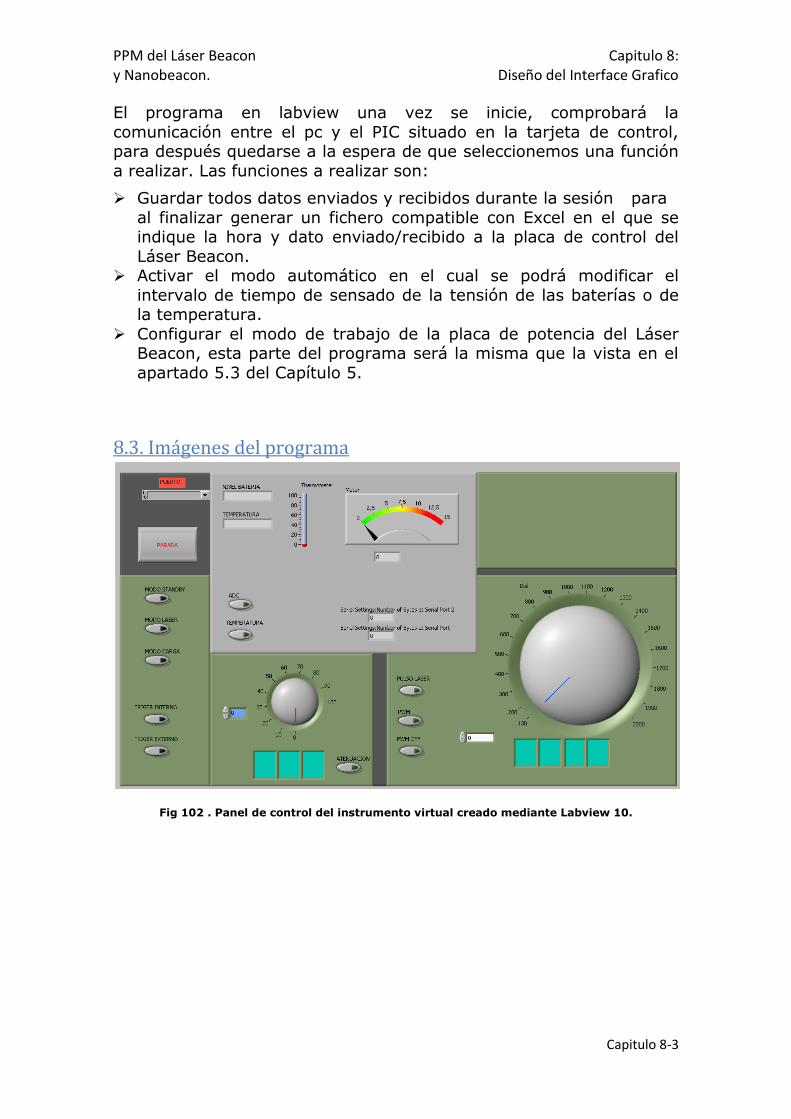
PPM del Láser Beacon Capitulo 8: y Nanobeacon. Diseño del Interface Grafico
Capitulo 8-3
El programa en labview una vez se inicie, comprobará la
comunicación entre el pc y el PIC situado en la tarjeta de control, para después quedarse a la espera de que seleccionemos una función
a realizar. Las funciones a realizar son:
Guardar todos datos enviados y recibidos durante la sesión para
al finalizar generar un fichero compatible con Excel en el que se indique la hora y dato enviado/recibido a la placa de control del
Láser Beacon. Activar el modo automático en el cual se podrá modificar el
intervalo de tiempo de sensado de la tensión de las baterías o de la temperatura.
Configurar el modo de trabajo de la placa de potencia del Láser Beacon, esta parte del programa será la misma que la vista en el
apartado 5.3 del Capítulo 5.
8.3. Imágenes del programa
Fig 102 . Panel de control del instrumento virtual creado mediante Labview 10.

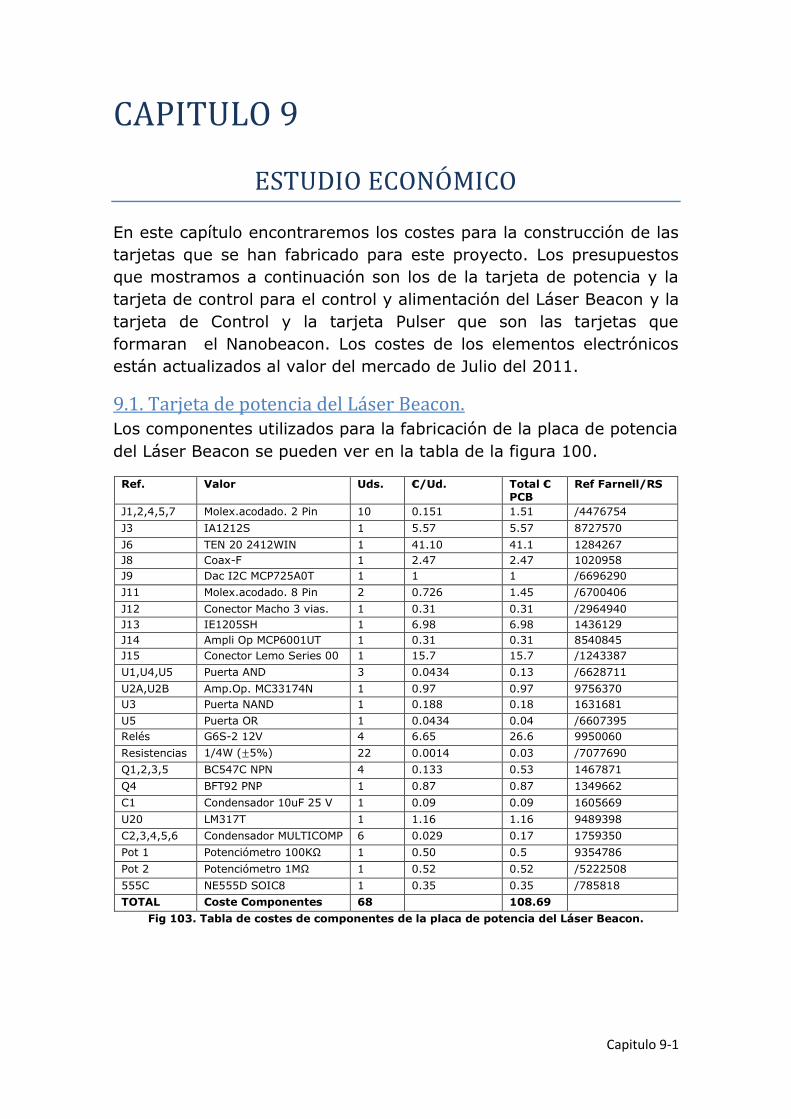
Capitulo 9-1
En este capítulo encontraremos los costes para la construcción de las
tarjetas que se han fabricado para este proyecto. Los presupuestos
que mostramos a continuación son los de la tarjeta de potencia y la
tarjeta de control para el control y alimentación del Láser Beacon y la
tarjeta de Control y la tarjeta Pulser que son las tarjetas que
formaran el Nanobeacon. Los costes de los elementos electrónicos
están actualizados al valor del mercado de Julio del 2011.
9.1. Tarjeta de potencia del Láser Beacon. Los componentes utilizados para la fabricación de la placa de potencia
del Láser Beacon se pueden ver en la tabla de la figura 100.
Ref. Valor Uds. €/Ud. Total € PCB
Ref Farnell/RS
J1,2,4,5,7 Molex.acodado. 2 Pin 10 0.151 1.51 /4476754
J3 IA1212S 1 5.57 5.57 8727570
J6 TEN 20 2412WIN 1 41.10 41.1 1284267
J8 Coax-F 1 2.47 2.47 1020958
J9 Dac I2C MCP725A0T 1 1 1 /6696290
J11 Molex.acodado. 8 Pin 2 0.726 1.45 /6700406
J12 Conector Macho 3 vias. 1 0.31 0.31 /2964940
J13 IE1205SH 1 6.98 6.98 1436129
J14 Ampli Op MCP6001UT 1 0.31 0.31 8540845
J15 Conector Lemo Series 00 1 15.7 15.7 /1243387
U1,U4,U5 Puerta AND 3 0.0434 0.13 /6628711
U2A,U2B Amp.Op. MC33174N 1 0.97 0.97 9756370
U3 Puerta NAND 1 0.188 0.18 1631681
U5 Puerta OR 1 0.0434 0.04 /6607395
Relés G6S-2 12V 4 6.65 26.6 9950060
Resistencias 1/4W ( 5%) 22 0.0014 0.03 /7077690
Q1,2,3,5 BC547C NPN 4 0.133 0.53 1467871
Q4 BFT92 PNP 1 0.87 0.87 1349662
C1 Condensador 10uF 25 V 1 0.09 0.09 1605669
U20 LM317T 1 1.16 1.16 9489398
C2,3,4,5,6 Condensador MULTICOMP 6 0.029 0.17 1759350
Pot 1 Potenciómetro 100KΩ 1 0.50 0.5 9354786
Pot 2 Potenciómetro 1MΩ 1 0.52 0.52 /5222508
555C NE555D SOIC8 1 0.35 0.35 /785818
TOTAL Coste Componentes 68 108.69
Fig 103. Tabla de costes de componentes de la placa de potencia del Láser Beacon.
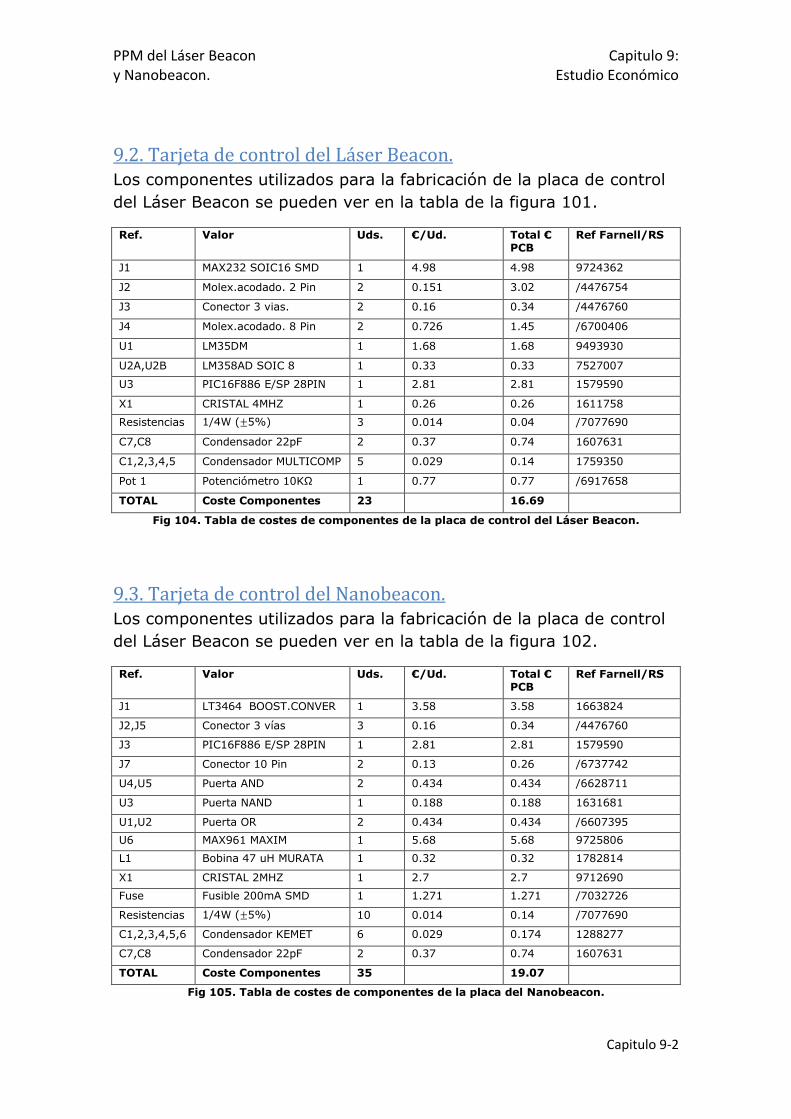
PPM del Láser Beacon Capitulo 9: y Nanobeacon. Estudio Económico
Capitulo 9-2
9.2. Tarjeta de control del Láser Beacon. Los componentes utilizados para la fabricación de la placa de control
del Láser Beacon se pueden ver en la tabla de la figura 101.
Ref. Valor Uds. €/Ud. Total € PCB
Ref Farnell/RS
J1 MAX232 SOIC16 SMD 1 4.98 4.98 9724362
J2 Molex.acodado. 2 Pin 2 0.151 3.02 /4476754
J3 Conector 3 vias. 2 0.16 0.34 /4476760
J4 Molex.acodado. 8 Pin 2 0.726 1.45 /6700406
U1 LM35DM 1 1.68 1.68 9493930
U2A,U2B LM358AD SOIC 8 1 0.33 0.33 7527007
U3 PIC16F886 E/SP 28PIN 1 2.81 2.81 1579590
X1 CRISTAL 4MHZ 1 0.26 0.26 1611758
Resistencias 1/4W ( 5%) 3 0.014 0.04 /7077690
C7,C8 Condensador 22pF 2 0.37 0.74 1607631
C1,2,3,4,5 Condensador MULTICOMP 5 0.029 0.14 1759350
Pot 1 Potenciómetro 10KΩ 1 0.77 0.77 /6917658
TOTAL Coste Componentes 23 16.69
Fig 104. Tabla de costes de componentes de la placa de control del Láser Beacon.
9.3. Tarjeta de control del Nanobeacon. Los componentes utilizados para la fabricación de la placa de control
del Láser Beacon se pueden ver en la tabla de la figura 102.
Ref. Valor Uds. €/Ud. Total € PCB
Ref Farnell/RS
J1 LT3464 BOOST.CONVER 1 3.58 3.58 1663824
J2,J5 Conector 3 vías 3 0.16 0.34 /4476760
J3 PIC16F886 E/SP 28PIN 1 2.81 2.81 1579590
J7 Conector 10 Pin 2 0.13 0.26 /6737742
U4,U5 Puerta AND 2 0.434 0.434 /6628711
U3 Puerta NAND 1 0.188 0.188 1631681
U1,U2 Puerta OR 2 0.434 0.434 /6607395
U6 MAX961 MAXIM 1 5.68 5.68 9725806
L1 Bobina 47 uH MURATA 1 0.32 0.32 1782814
X1 CRISTAL 2MHZ 1 2.7 2.7 9712690
Fuse Fusible 200mA SMD 1 1.271 1.271 /7032726
Resistencias 1/4W ( 5%) 10 0.014 0.14 /7077690
C1,2,3,4,5,6 Condensador KEMET 6 0.029 0.174 1288277
C7,C8 Condensador 22pF 2 0.37 0.74 1607631
TOTAL Coste Componentes 35 19.07
Fig 105. Tabla de costes de componentes de la placa del Nanobeacon.
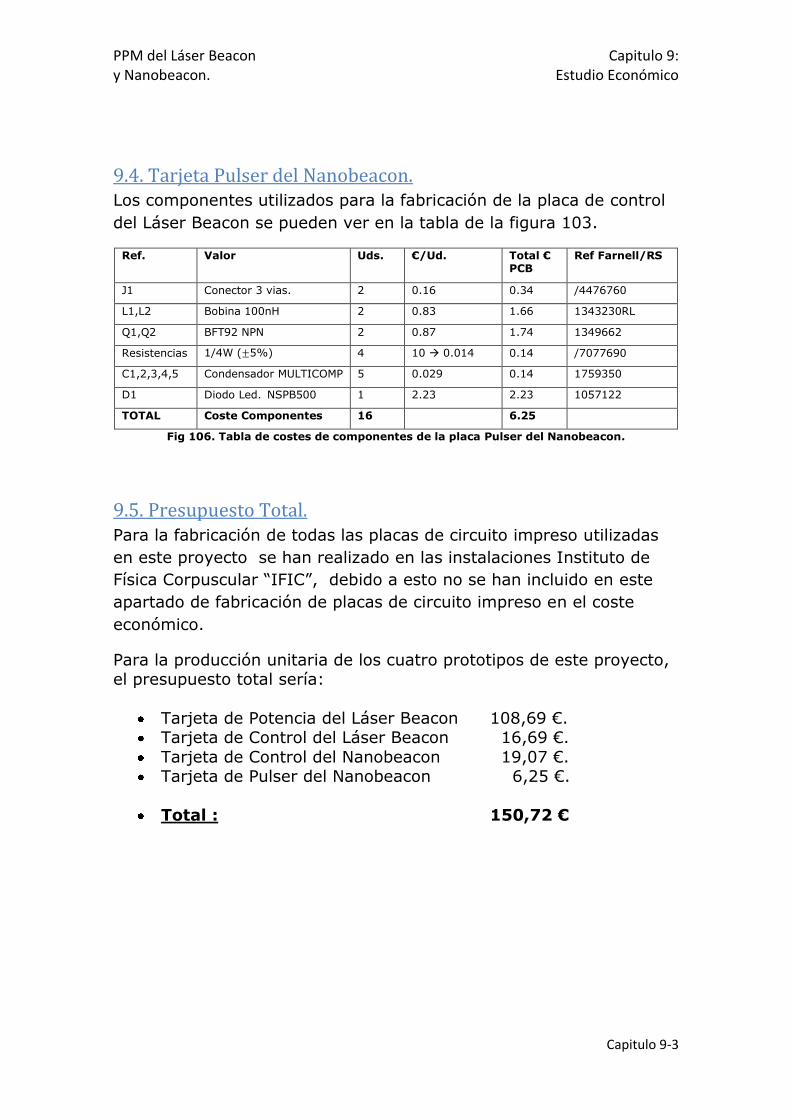
PPM del Láser Beacon Capitulo 9: y Nanobeacon. Estudio Económico
Capitulo 9-3
9.4. Tarjeta Pulser del Nanobeacon. Los componentes utilizados para la fabricación de la placa de control
del Láser Beacon se pueden ver en la tabla de la figura 103.
Ref. Valor Uds. €/Ud. Total € PCB
Ref Farnell/RS
J1 Conector 3 vias. 2 0.16 0.34 /4476760
L1,L2 Bobina 100nH 2 0.83 1.66 1343230RL
Q1,Q2 BFT92 NPN 2 0.87 1.74 1349662
Resistencias 1/4W ( 5%) 4 10 0.014 0.14 /7077690
C1,2,3,4,5 Condensador MULTICOMP 5 0.029 0.14 1759350
D1 Diodo Led. NSPB500 1 2.23 2.23 1057122
TOTAL Coste Componentes 16 6.25
Fig 106. Tabla de costes de componentes de la placa Pulser del Nanobeacon.
9.5. Presupuesto Total. Para la fabricación de todas las placas de circuito impreso utilizadas
en este proyecto se han realizado en las instalaciones Instituto de
Física Corpuscular “IFIC”, debido a esto no se han incluido en este
apartado de fabricación de placas de circuito impreso en el coste
económico.
Para la producción unitaria de los cuatro prototipos de este proyecto, el presupuesto total sería:
Tarjeta de Potencia del Láser Beacon 108,69 €. Tarjeta de Control del Láser Beacon 16,69 €.
Tarjeta de Control del Nanobeacon 19,07 €. Tarjeta de Pulser del Nanobeacon 6,25 €.
Total : 150,72 €


Capitulo 10-1
En este capítulo se trataran las conclusiones alcanzadas tras la
realización del presente proyecto, las dificultades encontradas y los conocimientos adquiridos durante el desarrollo del mismo, así como
las posibles mejoras que se pueden realizar en un futuro. os.
10.1. Conclusiones. Los objetivos planteados al principio del proyecto eran:
Desarrollar y diseñar los prototipos de control del Láser Beacon y
mejorar el diseño del Nanobeacon. El prototipo de control del Láser Beacon tenía que cumplir las siguientes características:
Proporcionar alimentación y señales de control al Láser Beacon. Proporcionar una señal trigger de niveles TTL con un rango de
frecuencias comprendido entre 150 y 2000 Hz. Seleccionar entre una señal de trigger interna (generada por el
mismo), o externa que se nos proporcionara del exterior. Control sobre el Láser Beacon mediante comunicación RS232.
Suministrar una alimentación y las señales de control sobre el atenuador óptico(Polarizador).
Implementar mediante software Labview un panel de control Virtual capaz de controlar y testear el hardware del láser
Beacon.
El prototipo para el sistema de Nanobeacon tenía que cumplir:
Seleccionar entre una señal de trigger interna (generada por el
mismo), o externa que se nos proporcionara del exterior. Control sobre el Nanobeacon mediante comunicación I2C.
Seleccionar entre una señal de trigger interna (generada por el mismo), o externa que se nos proporcionara del exterior.
Proporcionar alimentación y señales de control al Led Beacon.
Proporcionar una señal trigger de niveles TTL con un rango de frecuencias comprendido entre 500 y 2000 Hz.
Por lo que llegamos a la conclusión de que se han cumplido con todos los objetivos planteados inicialmente en este proyecto.

PPM del Láser Beacon Capitulo 10: y Nanobeacon. Conclusiones
Capitulo 10-2
10.2. Aprendizaje.
Este proyecto me ha servido para adquirir conocimientos sobre:
Programación en lenguaje de alto nivel de microcontroladores,
en este caso el lenguaje C. Muy común en la programación digital de casi cualquier sistema electrónico.
Utilización de software especifico para la simulación de programación de alto nivel, lenguaje C.
Conocimientos en convertidores dc/dc y limitadores de corriente, así como en fuentes de alimentación conmutadas.
Diseño de placas de circuito impreso mediante el software de diseño electrónico Orcad.
Conocimientos en protocolos de comunicación serie, como RS232, I2C.
Estructura, características y tipos de baterías comerciales.
En la elaboración de este proyecto se ha tenido que diseñar y ensamblar un prototipo como el del Láser Beacon partiendo desde
cero, teniendo que hacer el diseño de las placas. El aprendizaje en C de los microcontroladores y el manejo de los protocolos de
comunicación serie como el RS232 y I2C ha sido desde cero, puesto que inicialmente no tenía ningún tipo de experiencia previa sobre
ellos. Cierto es que para el prototipo del Nanobeacon se ha partido del diseño existen en el Proyecto Antares, este se ha mejorado
obteniendo así una configuración con mas precisión y que nos ofrece más posibilidades que la diseñada para el proyecto Antares.
10.3. Futuras Mejoras.
En un futuro, se podrá mejorar el sistema con las siguientes modificaciones:
Utilizar un potenciómetro digital controlador por I2C para poder
modificar la corriente de carga de las baterías. Incorporar un sensor de corriente a la entrada de las baterías y
del Láser que indique tanto la corriente de carga como el consumo del Láser.
Utilizar protocolo de comunicación RS485 más rápido, seguro y
permitiendo mayor distancia de transmisión que el utilizado RS232.

Capitulo 11-1
1. Leptones: En física, un leptón es una partícula con espín que no experimenta interacción fuerte. Los leptones forman parte de una
familia de partículas elementales conocida como la familia de los fermiones.
2. Quarks: Es una de las seis partículas que, según se cree son los
constituyentes básicos de las partículas elementales como el prontón, el neutrón o el pión. El concepto de quark fue propuesto
independientemente en 1963 por los físicos estadounidenses Murray Gell Mann y George Zweig. El termino quark se tomo de la obra
Finnegans Wake del escritor irlandés James Joyce. 3. Quasars: Un cuásar o quásar (acrónimo en inglés de quasi-stellar
radio source) es una fuente astronómica de energía electromagnética, que incluye radiofrecuencias y luz visible.
4. Megapársec: El pársec es una unidad de longitud utilizada en astronomía.
5. M.A.Markov : Cientifico ruso que en 1960 propuso usar un gran recipiente de agua para la observación astronómica de neutrinos.
6. Cherenkov: Radiación que produce un efecto óptico en forma de cono de luz al interaccionar los neutrinos con la corteza terrestre.
7. Isótopos: Se conoce como isótopos a los átomos de un mismo
elemento que posee distinto número electrones, es decir, distinto número de atómico que de número másico. 8. Fotomultiplicadores: Se llama fotomultiplicador a un tipo de detector óptico de vacío que aprovecha el efecto de emisión
secundaria de electrones para responder a niveles muy bajos de iluminación, manteniendo un nivel de ruido aceptable.
9. Fotocátodo: Un Fotocátodo es un dispositivo sensible a la luz formado por una capa de una sustancia metálica como el cesio, sodio
ó antimonio sobre una base de cuarzo o vidrio y que descarga electrones cuando se expone a cierto nivel de luminosidad.
10. Marinas: Velocidad del mar del lugar escogido es de 5 cm/s, la velocidad máxima medida es de 18 cm/s.
11. Benthos: Esfera de vidrio instalada en Antares que protege a cada fotomultiplicador y su electrónica de la presión. Además, el
campo magnético de la Tierra se apantalla mediante una malla de µ-
metal. 12. Convolución: Matemáticamente una convolución es un
operador matemático que transforma dos funciones f y g en una tercera función que en cierto sentido representa la magnitud en la
que se superponen f y una versión trasladada e invertida de g. Una convolución es un tipo muy general de promedio móvil.

PPM del Láser Beacon Capitulo 11: y Nanobeacon. Glosario de Términos
Capitulo 11-2
13. Transmisividad: La capacidad de un material de transmitir la
radiación incidente sobre él, es decir es la proporción de radiación que es capaz de atravesar dicho material. 14. Array: Termino usado para referirse a matrices de elementos. 15. Georeferencia: Se refiere al posicionamiento con el que se
define la localización de un objeto (representado en el plano espacial mediante punto, vector, área, volumen) en un sistema de
coordenadas y datum determinado. 16. Electrólito: Sustancia que, fundida o en disolución acuosa, se
disocia en iones, por lo cual es conductora de la electricidad 17. Oxidróxido: Los hidróxidos son un grupo de compuestos
químicos formados por un metal y uno o varios aniones hidroxilos, en lugar de oxígeno como sucede con los óxidos.
18. Dendritas: as dendritas son pequeños hilos metálicos que se
forman por la aglomeración de partículas de plomo de la placa negativa en una batería.
19. Fluctúe(Fluctuar): Experimentar algo una variación de valor o
medida. 20. Pseudocapacitancia: En la utilización de súper condensadores
es la deficiencia electrónica producto de la interacción de los iones metálicos con el medio de carbono. La pseudocapacitancia es un
fenómeno dependiente de la tensión, con lo que por lo tanto se posee una capacitancia variable que debe ser controlada adecuadamente. 21. Polímeros: Se denomina polímeros a la unión que producen de cientos de miles de moléculas pequeñas denominadas monómeros
que forman enormes cadenas.
22. Jitter: Se denomina Jitter a la variabilidad temporal durante el envío de señales digitales. Es un cambio indeseado y abrupto de la
propiedad de una señal. Esto puede afectar tanto a la amplitud como a la frecuencia y la situación de fase. El jitter es la primera
consecuencia de un retraso de la señal. 23. Slew-rate: Es una efecto no lineal de los amplificadores. Se
puede definir como la velocidad de respuesta del amplificador ante variaciones de la tensión de entrada. Representa la incapacidad de un
amplificador para seguir variaciones rápidas de la señal de entrada. 24. Dieléctrico: Material que no conduce la electricidad por lo que
puede ser utilizado como aislante eléctricos. 25. Relés: El relé o relevador es un dispositivo electromecánico.
Funciona como un interruptor controlado por un circuito eléctrico en el que, por medio de una bobina y un electroimán, se acciona un
juego de uno o varios contactos que permiten abrir o cerrar otros
circuitos eléctricos independientes

PPM del Láser Beacon Capitulo 11: y Nanobeacon. Glosario de Términos
Capitulo 11-3
26. Risc(reduced instruction set computer): Es un tipo de
arquitectura de fabricación de microprocesadores, algunas de sus características son:
Instrucciones simples, de formato fijo, con pocos modos de
direccionamiento. Ausencia de microcódigo.
Codificación uniforme de instrucciones Un conjunto de registros homogéneo, permitiendo que cualquier
registro sea utilizado en cualquier contexto y así simplificar el
diseño del compilador. Modos de direccionamiento simple con modos más complejos
reemplazados por secuencias de instrucciones aritméticas simples.
27. PWM(pulse-width modulation): La modulación por anchura de
pulsos es una técnica de modulación en la que se modifica el ciclo de trabajo de una señal periódica para, entre otras cosas, por ejemplo
variar la velocidad de un motor. El ciclo de trabajo de una señal periódica es el ancho relativo de su parte positiva en relación al
período. 28. Prescalers: Es un registro del microcontrolador el cual dividirá la
frecuencia de los módulos temporizadores, este valor de prescaler dependerá del tipo de microcontrolador utilizado. Los valores mas
habituales suelen ser 1,4,16. 29. Dac (Digital Analog Converter): Convertidor digital analógico,
dispositivo electrónico que convertirá un valor digital recibido en un
valor analógico a la salida del mismo. 30. Byte: Un byte es la unidad fundamental de datos en los
ordenadores personales, un byte son ocho bits contiguos. El byte es también la unidad de medida básica para memoria, almacenando el
equivalente a un carácter. 31. Lambertiano: la energía de emisión se distribuye de forma que
no varía con el ángulo de emisión. Por ejemplo un trozo de papel blanco grueso, si es iluminado por luz solar difusa, el brillo del papel
percibido visualmente no varía con el ángulo de observación. 32. Rise time: Se denomina rise time o tiempo de subida al tiempo
que tarda una señal en pasar del 10% al 90 % de su valor maximo. Es una característica muy importante cuando se trabaja con
frecuencias altas.

Capitulo 12-1
[1].Sistema de Transceptores de Ultrasonidos para triangulación
acústica en el telescopio de Neutrinos KM3NeT. Autor. Carlos David Llorens Álvarez.
[2].Documento oficial KM3NeT :Technical description of the PPM of
the KM3NeT detection unit.
[3].Documento oficial KM3NeT: Technical Design Report for a Deep-Sea Research Infrastructure in the Mediterranean Sea Incorporating a
Very Large Volume Neutrino Telescope.
[4].Estudio de fotomultiplicadores de gran fotocátodo para el
telescopio submarino de neutrinos ANTARES. Autor. Emiliano Carmona Flores.
[5].Carga Rápida de Baterías de Ni-Cd y Ni-MH de media y gran capacidad. Análisis, síntesis y comparación de nuevos métodos. Autor
.Juan Carlos Viera Pérez.
[6].Documento Oficial KM3NeT. Optical Calibration Laser Beacon and Nanobeacon Status. Autor. Fernando Urbano Flores.
[7].Documento Oficial KM3NeT.Una nueva ventana a nuestro Universo. Autor. Mikel Ardid.
[8].Documento Oficial KM3NeT. Análisis diodos led para el Nanobeacon. Autor. Diego Real Mañez.
[9].Documento Oficial KM3NeT. Proposal for a Láser Beacon (LB) and an acoustic positioning system (APS) for the instrumentation line of
Antares.
[10].Página oficial Antares Valencia: http://ific.uv.es/antares/.
[11].Página web Universidad de Leiden Holanda: http://www.leidenuniv.nl/en/researcharchive/index.php3-c=474.htm.
[12].Documentación IFIC.
[13].Página Web: http://robotsargentina.com.ar/Comunicacion_
busI2C.htm
[14].Página Web: www.macuarium.com/cms/index.php?option=com_content&
task=view&id=386&Itemid=90.
[15].Página Web: http://grupo1t1.wordpress.com/baterias-para-
notebooks/.
Capitulo 11-2
[16].Página Web: http://es.farnell.com
[17].Página Web: http://www.icmm.csic.es/jaalonso/velec/baterias/bateria.htm
[18].Página Web:
http://www.esacademic.com/dic.nsf/eswiki/291994.
[19].Página Web: http://www.farnell.com/datasheets/1314038.pdf.
[20].Hoja del Fabricante del Láser. Microchip SNP,G II 101019.pdf
[21].Hoja del fabricante del Láser. Microchip MLC-03A-xR0
100510.pdf.
[22].Hoja del Fabricante del relé Omron:
www.farnell.com/datasheets/13451.pdf.
[23].Página Web: http://www.ea1uro.com/tecnico/cargador.html.
[24].Captura realizada con Osciloscopio Wave Pro 6000.
[25].Hoja del Fabricante de Microchip del PIC16F886.
[26].Captura de pantalla del Software de Programación CCS.
[27].Captura de pantalla del Software de Simulación Proteus.
[28].Captura de pantalla del Software de Programación PICKIT2.
[29].Foto del recipiente de Titanio del Láser Beacon.
[30].Foto del chasis de aluminio del Láser Beacon.
[31].Pruebas de Presión realizadas en NcHyperbaric.







