1 Fuentes de Neutrinos. ........................................................... 2-2 2 Producción de partículas debida a los rayos cósmicos ................ 2-3
3 Radiación Cherenkov. ............................................................ 2-4 4 Cono de luz producido por el efecto Cherenkov ......................... 2-4
5 Representación del Array de Antares ....................................... 2-6 6 Distribución de líneas Antares ................................................ 2-7
7 Vista esquemática de una línea. .............................................. 2-8 8 Imagen de esfera de Benthos instalada en Antares. .................. 2-8
9 Imagen del Módulo Óptico de Antares. .................................... 2-9 10 Longitud de atenuación de onda del Fotomultiplicador ............. 2-9
11 Estructura con sus tres esferas de Benthos. ......................... 2-10 12. Toma de datos del Telescopio de Neutrinos Antares. ............ 2-10
13. Distribución de líneas KM3NeT. .......................................... 2-13 14. Medidas de un piso del Telescopio KM3NeT. ........................ 2-14
15. Ancla del telescopio KM3NeT. ............................................ 2-14
16. Despliegue de medios. ...................................................... 2-15 17. Ubicación de Nanobeacons en un piso. ................................ 2-16
18. Ubicación del Láser Beacon. .............................................. 2-16 19. DOM “Digital Optical Module”. ............................................ 2-18
20. Estructura del DOM “Digital Optical Module”. ....................... 2-19 21. Tarjeta de potencia y tarjeta Octopus. ................................ 2-20
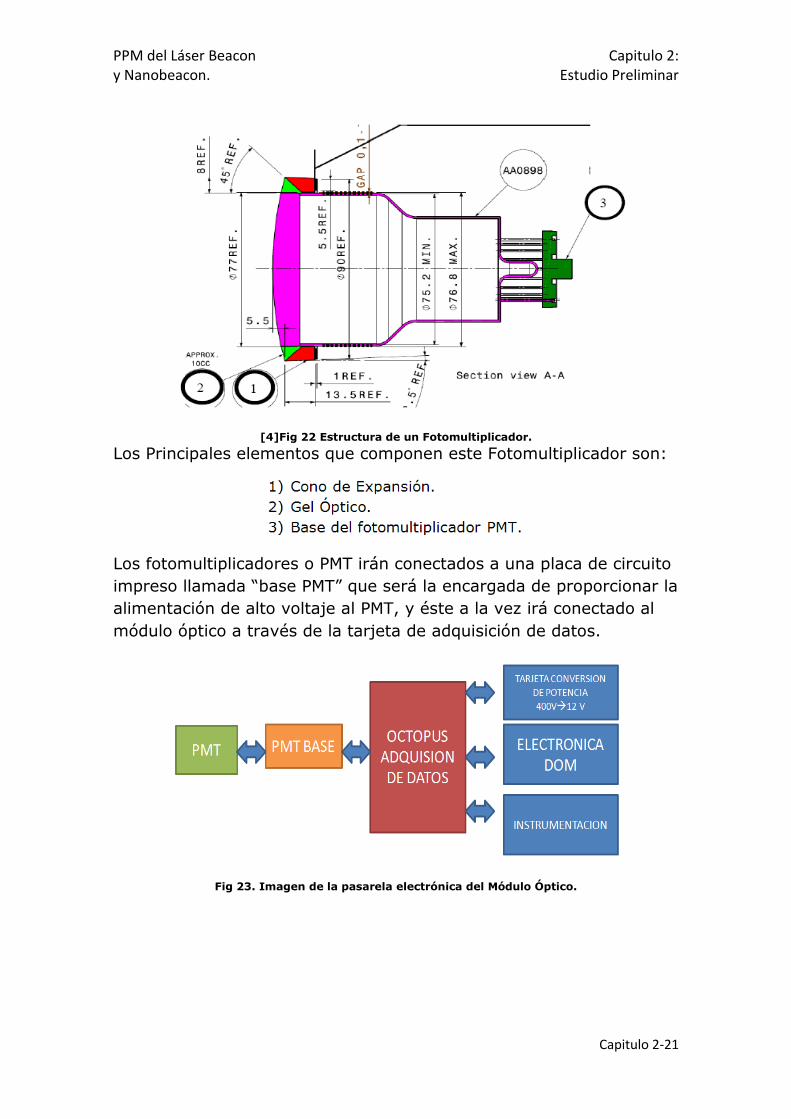
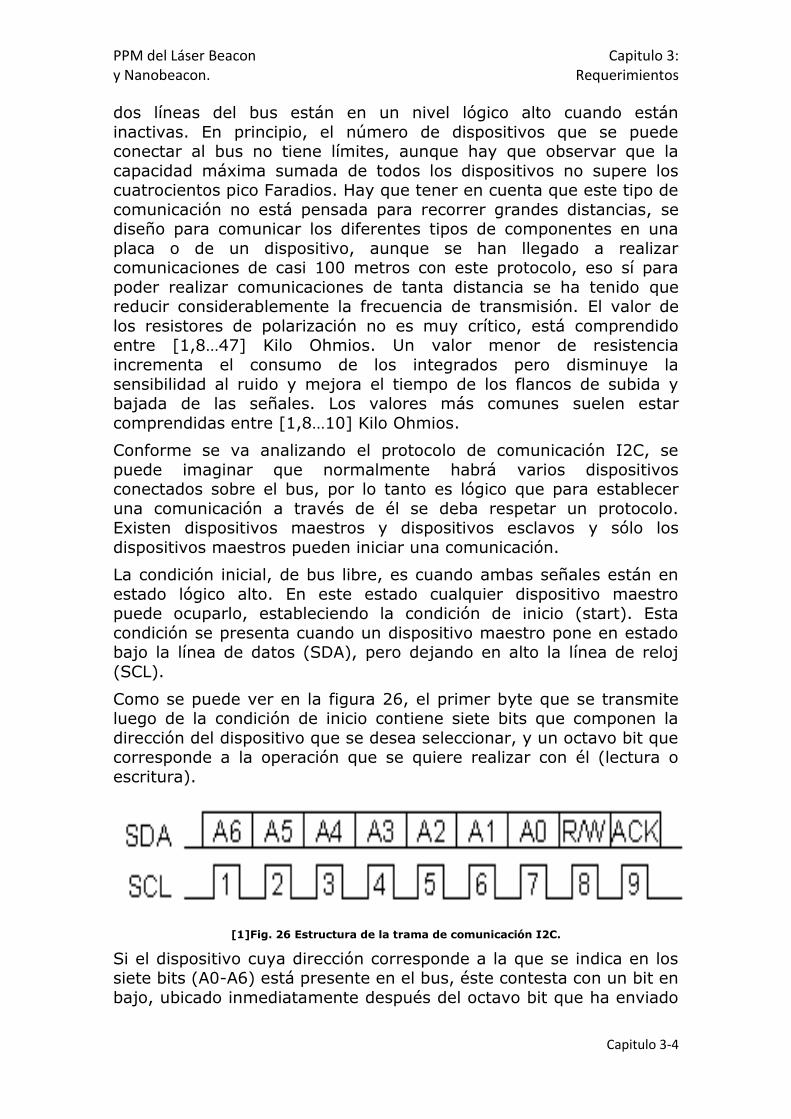
22. Estructura de un Fotomultiplicador. .................................... 2-21 23. Pasarela electrónica del Módulo Óptico. .............................. 2-21
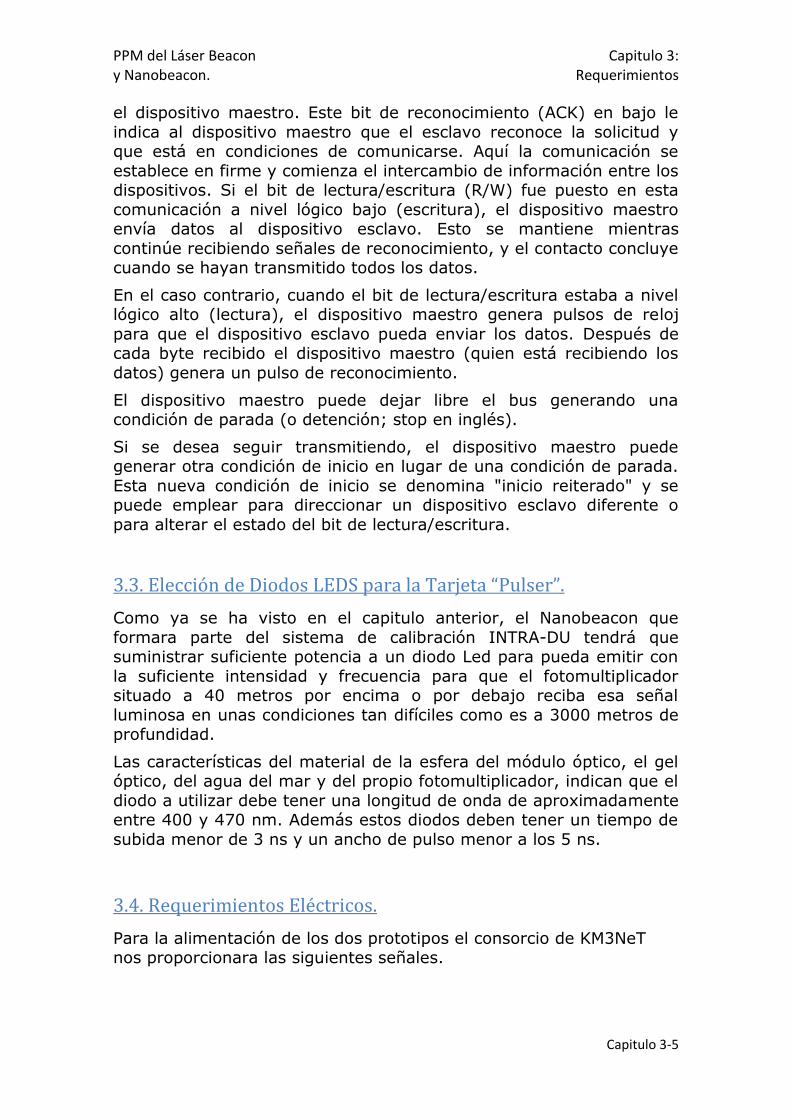
24. Estructura protocolo RS232. ................................................ 3-2 25. Esquema de conexión del bus I2C. ....................................... 3-3
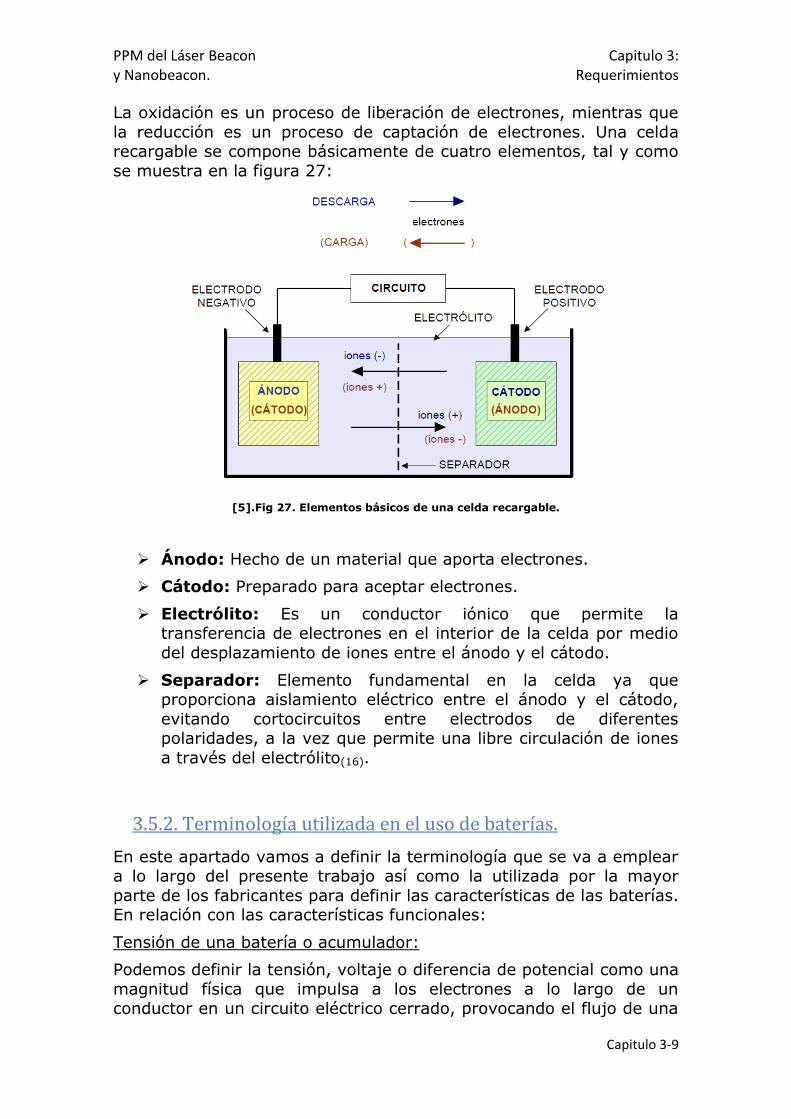
26. Trama de comunicación I2C. ............................................... 3-4 27. Elementos básicos de una celda recargable. .......................... 3-9
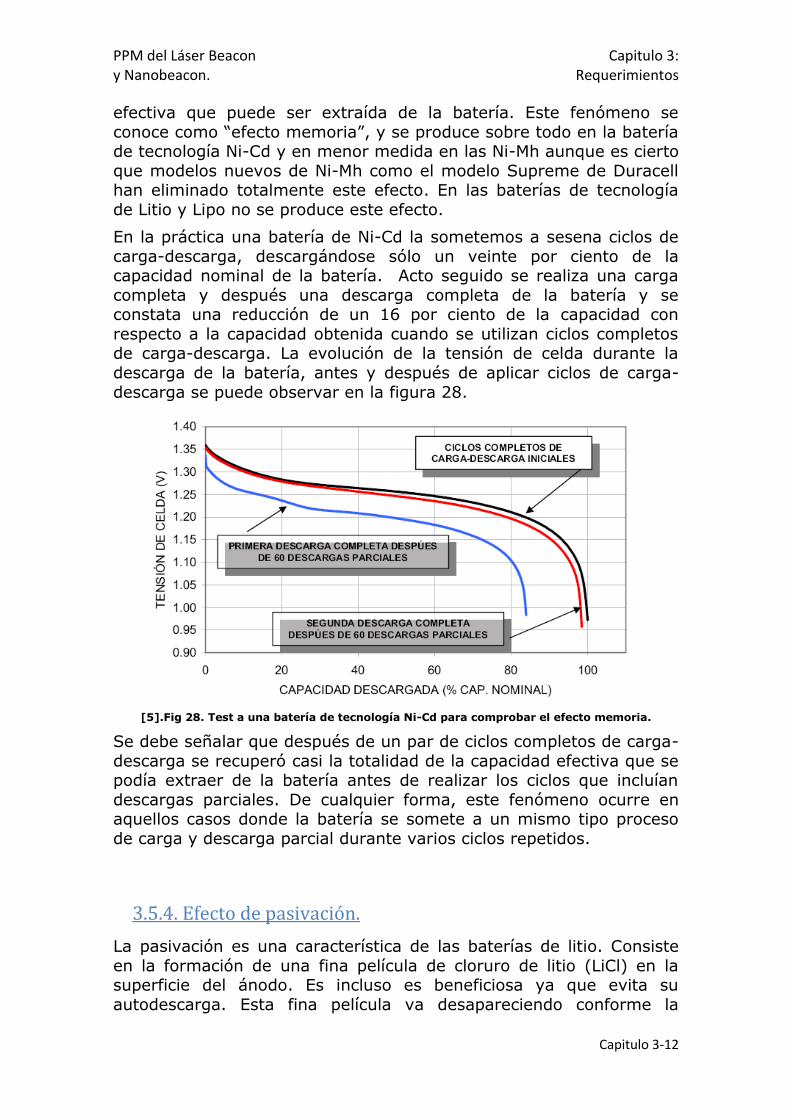
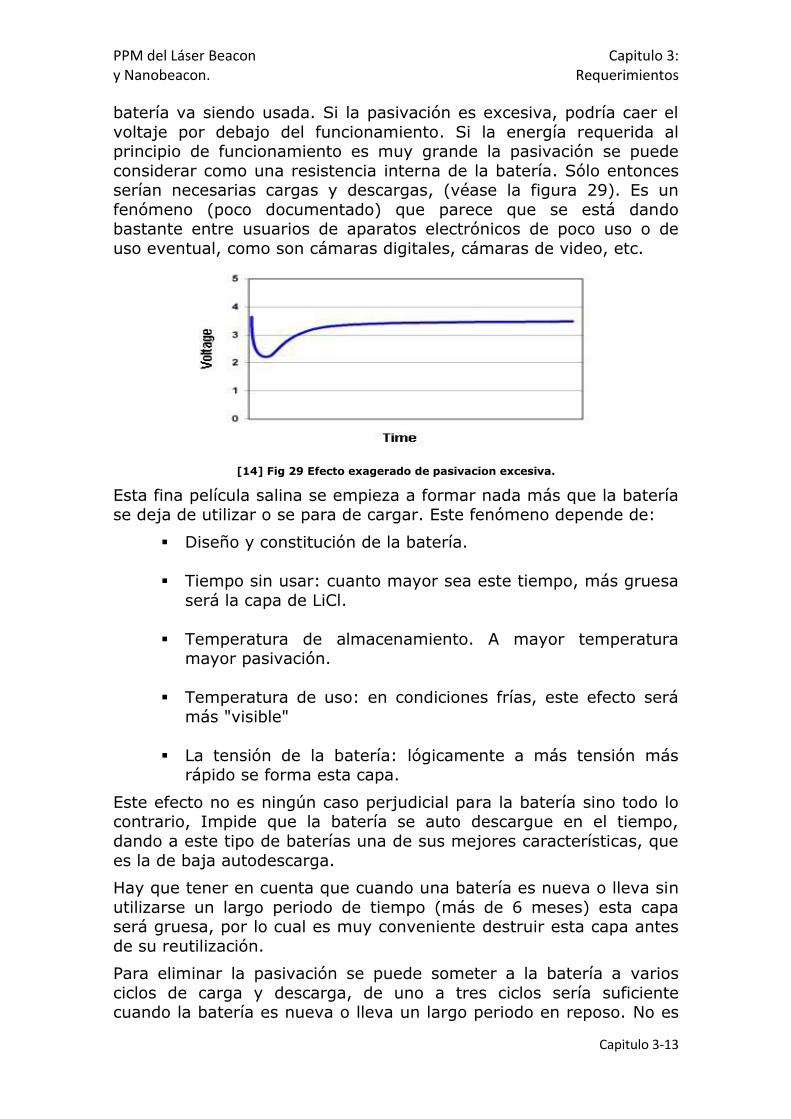
28. Carga y descarga sobre a una batería Ni-Cd ........................ 3-12 29. Efecto exagerado de pasivacion excesiva. ........................... 3-13
30. Imagen de Batería de Litio. ............................................... 3-16
31. Imagen de Pila Recargable de Niquel Cadmio. ..................... 3-18 32. Imagen de una Pila de Ni-MH. ........................................... 3-19
33. Imagen de Batería LiPo de 9.6v ......................................... 3-20 34. Súper Condensadores electrolíticos carbono de doble capa .... 3-22
35. Tabla comparativa de baterías ........................................... 3-23 36. Curva de carga de una celda de Níquel Metal Hidruro. .......... 3-25
37. Grafico V/h para descarga normal. ..................................... 3-26 38. Imagen del Láser Beacon. ................................................... 4-2
39. Imagen de la tarjeta MLC-03A-MP0 ...................................... 4-2 40. Elementos que formaran el Atenuador Óptico. ....................... 4-3
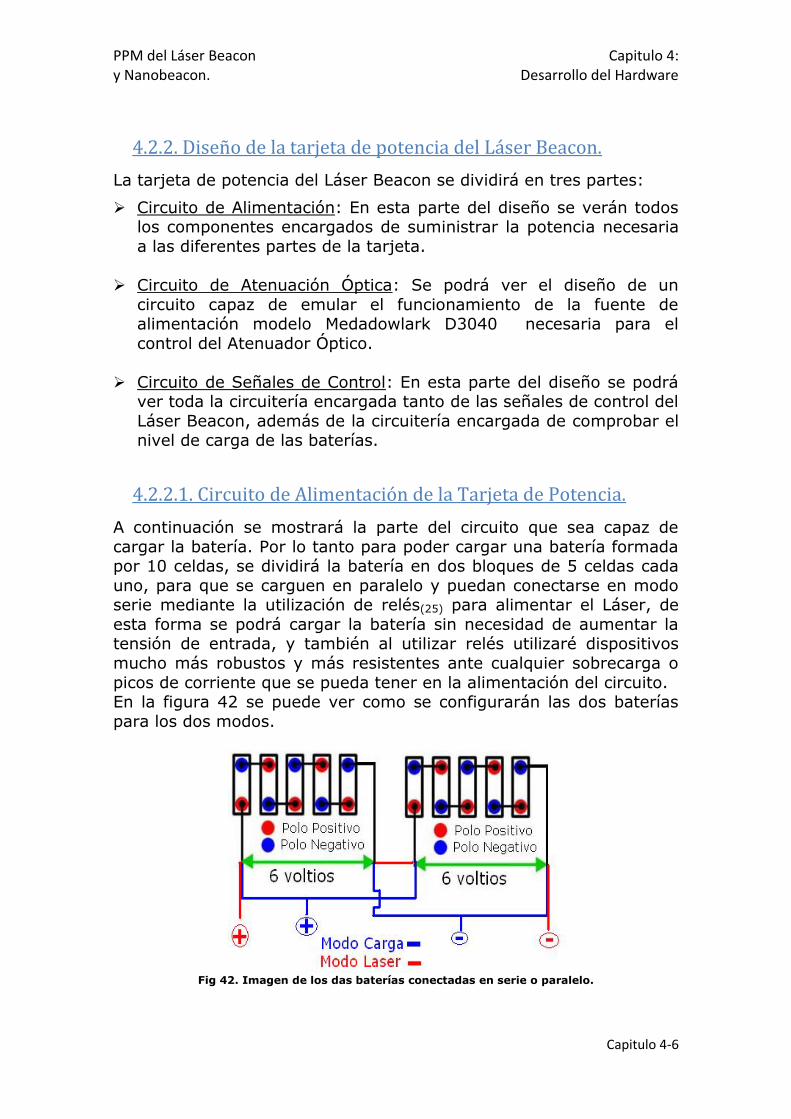
41. Diagrama de bloques de la tarjeta de potencia del Láser ......... 4-5 42. Imagen de configuracion de baterias .................................... 4-6
43. Esquemático de la Alimentación del Láser Beacon. ................. 4-7 44. Distribución de contactos de un relé doble modelo G6S-2 . ..... 4-8
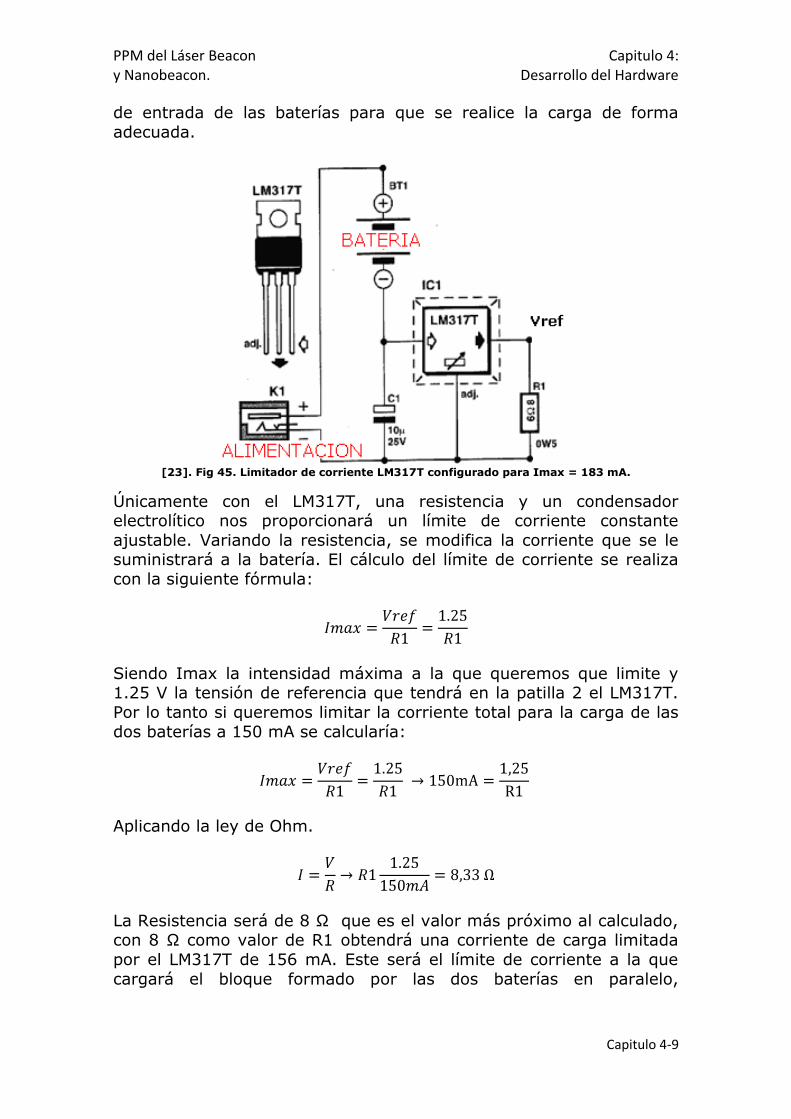
45. LM317T configurado para Imax ............................................ 4-9
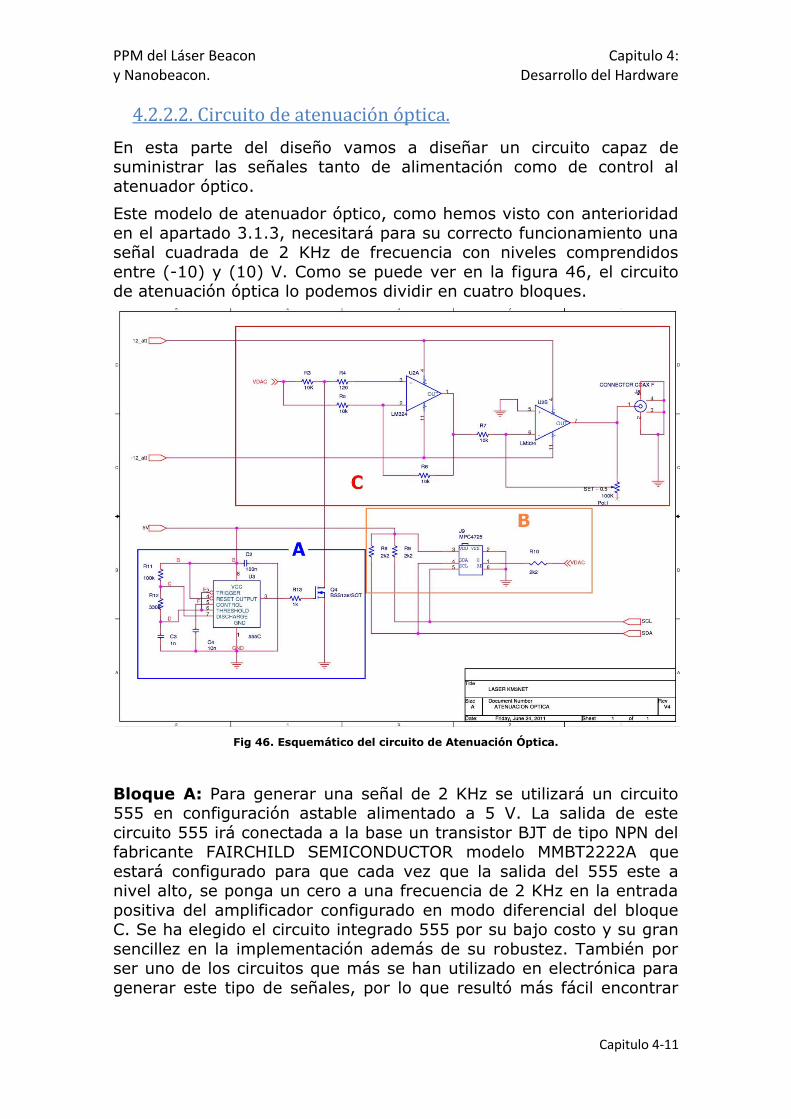
46. Esquemático del circuito de Atenuación Óptica. .................... 4-11
5
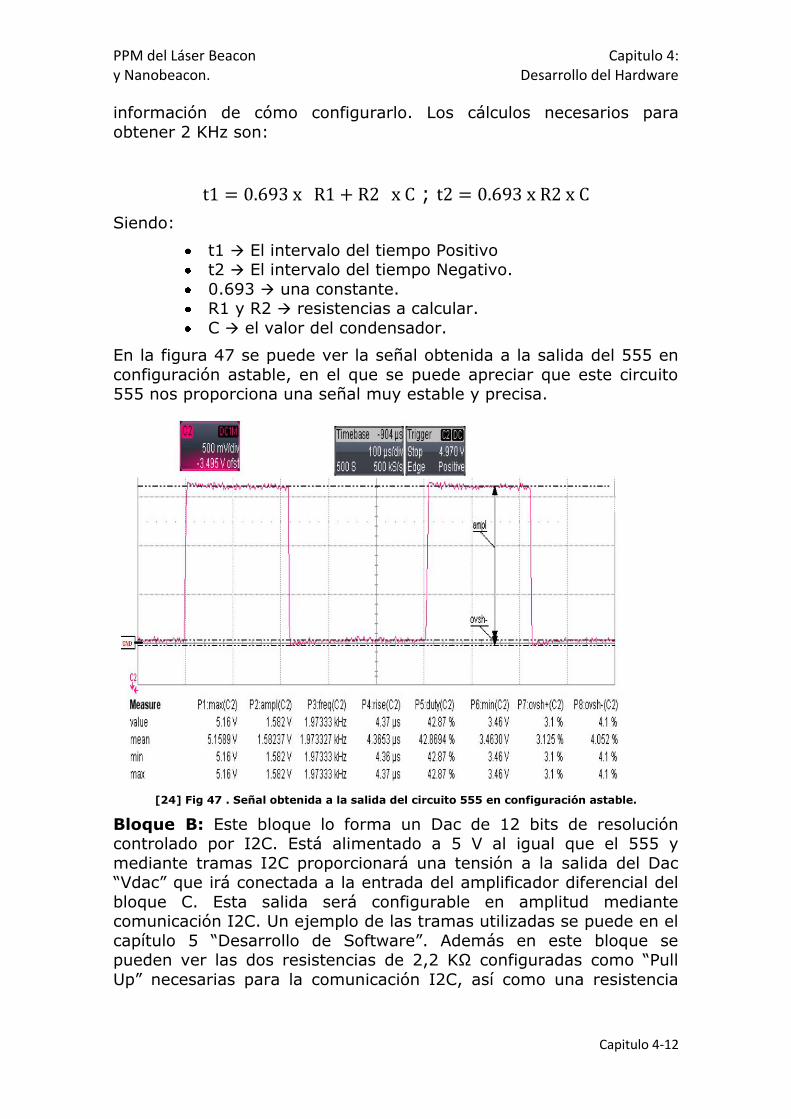
47. Salida circuito 555 en configuración astable. ....................... 4-12
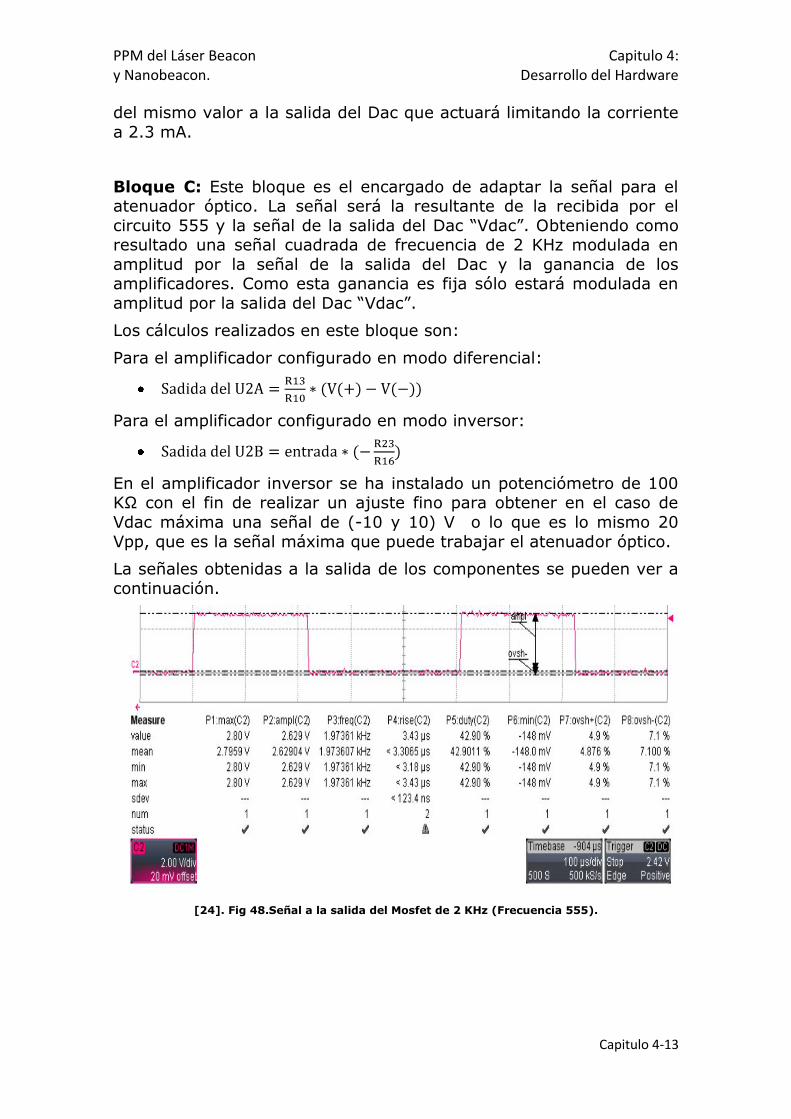
48. Salida Mosfet de 2 KHz (Frecuencia 555). ........................... 4-13 49. Salida del amplificador en modo Diferencial. ........................ 4-14
50. Salida del amplificador inversor ......................................... 4-14
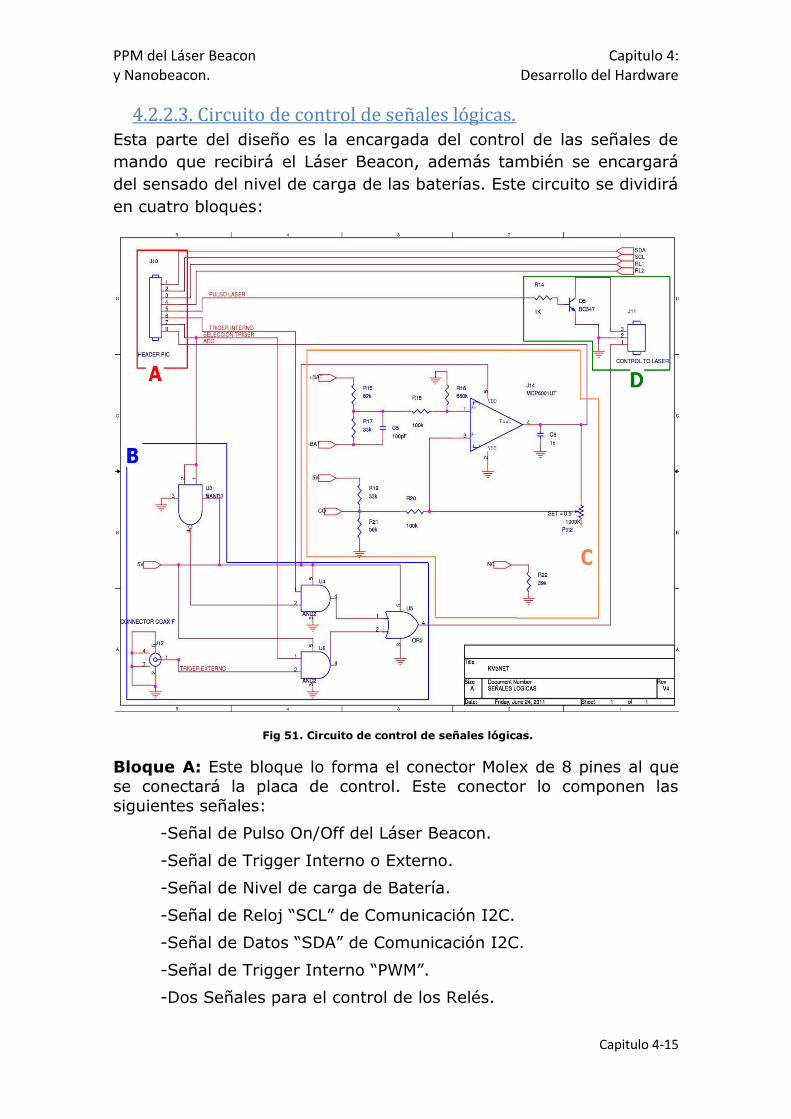
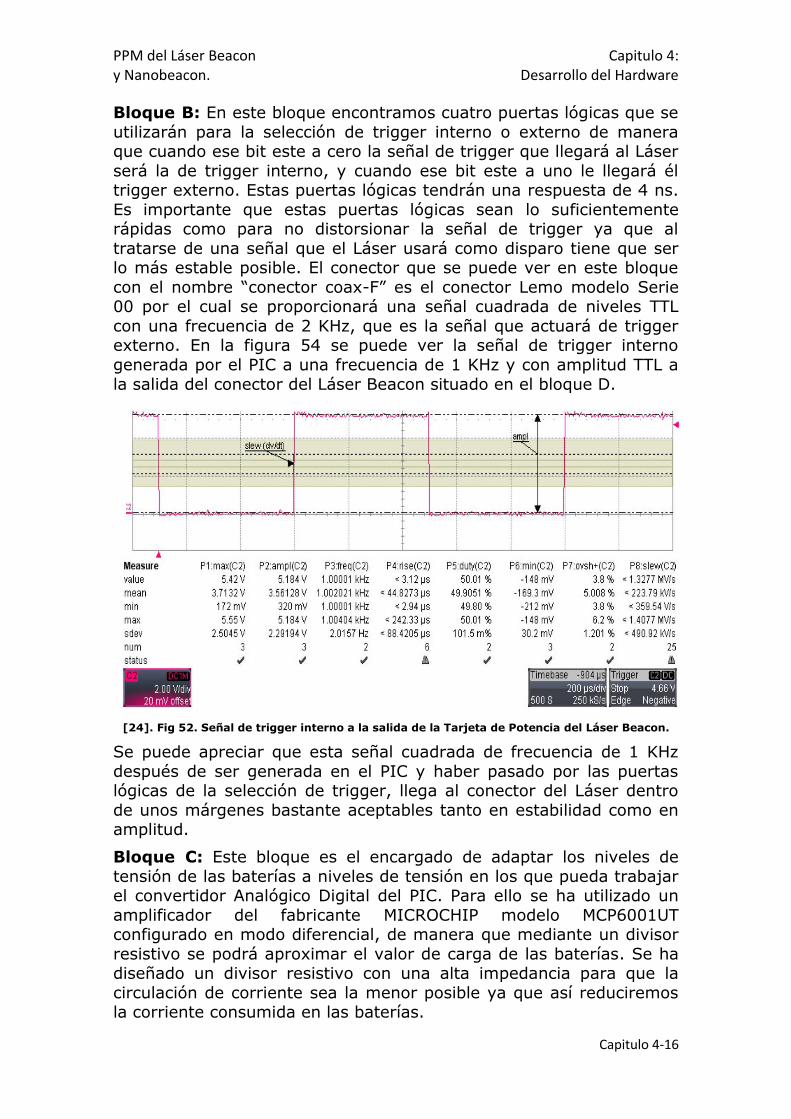
51. Circuito de control de señales lógicas.................................. 4-15 52. Salida Trigger interno, tarjeta de Potencia del Láser ............. 4-16
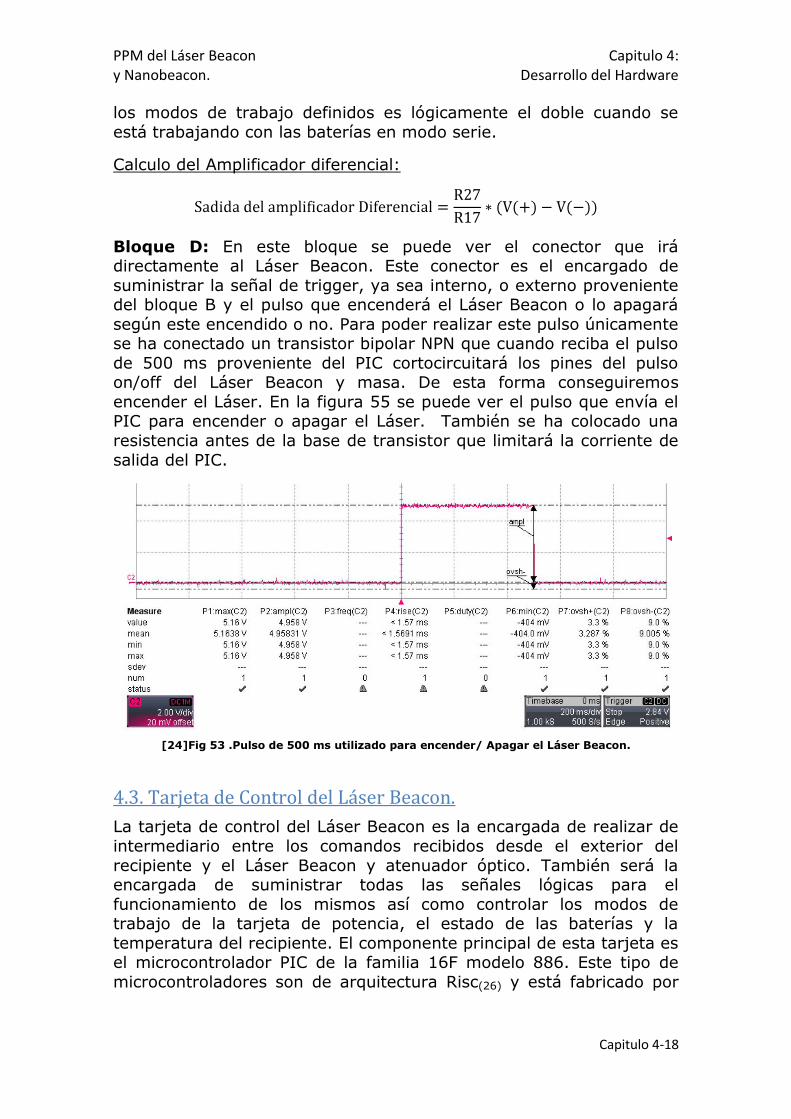
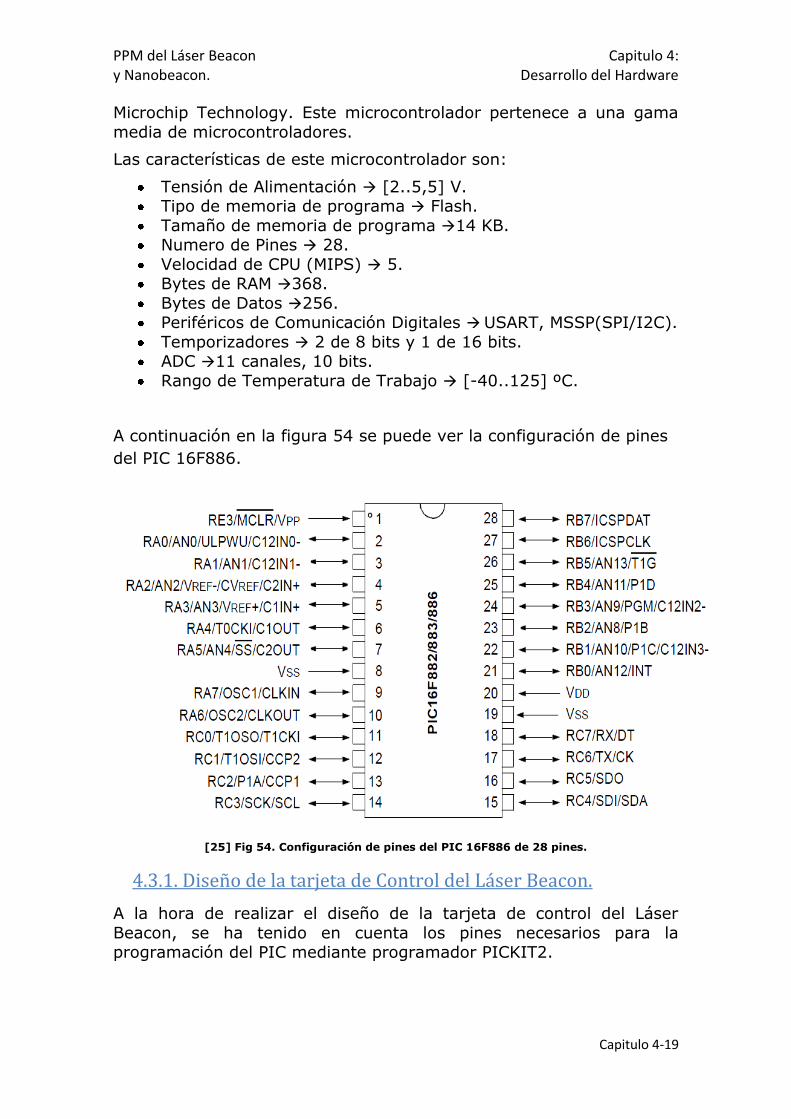
53. Pulso utilizado para encender/ Apagar el Láser ................... 4-18 54. Configuración de pines del PIC 16F886 de 28 pines. ............. 4-19
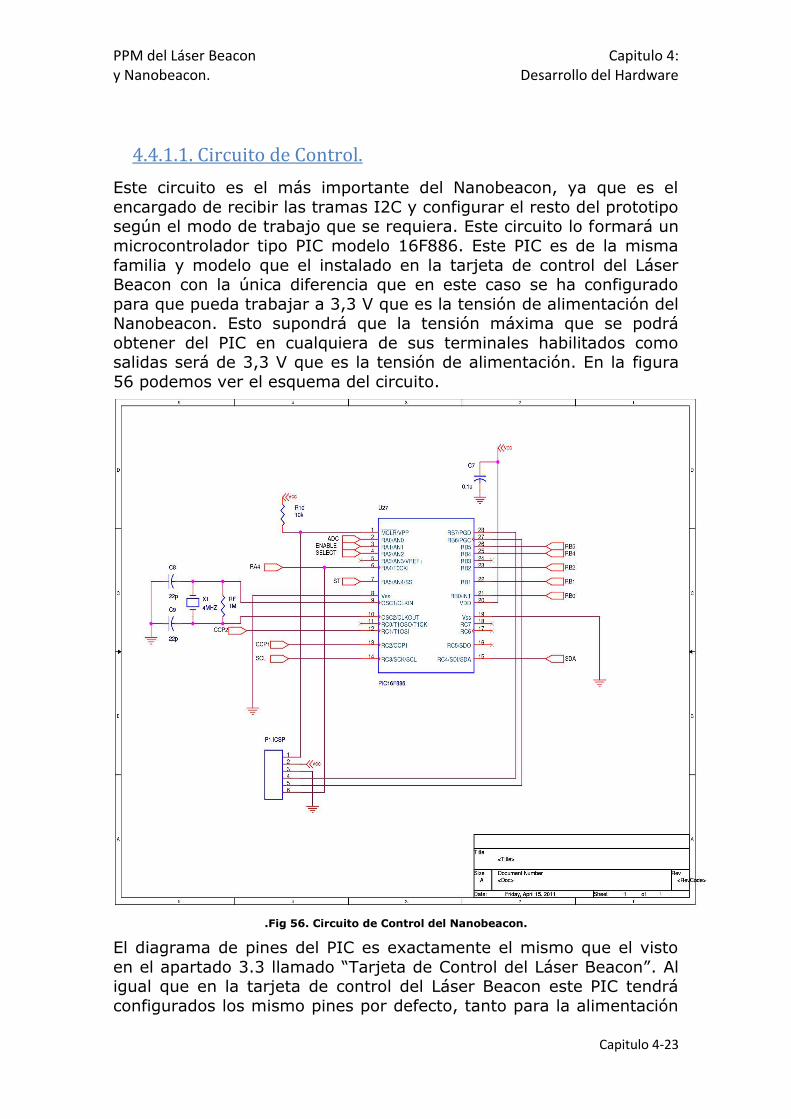
55. Esquemático de la tarjeta de control del Láser ..................... 4-20 56. Circuito de Control del Nanobeacon. ................................... 4-23
57. Salida trigger del PIC 16F886. ........................................... 4-24 58. Salida trigger del PIC tras puertas lógicas. .......................... 4-25
59. Duty del 10% emitido por el PIC16f886. ............................. 4-25 60. Duty máxima emitido por el PIC 16886. .............................. 4-25
61. Circuito de adquisición señales del Nanobeacon. .................. 4-28 61. Circuito de Potencia del Nanobeacon. ................................. 4-26
61. Filtro Paso Bajo de 1 orden. .............................................. 4-27 62. Comparación de señales con o sin MAX961. ........................ 4-29
63. Circuito de la tarjeta de emisión o “Pulser”. ......................... 4-30
64. Placa de potencia del Láser Beacon. ................................... 4-31 65. Placa de Control del Láser Beacon. ..................................... 4-31
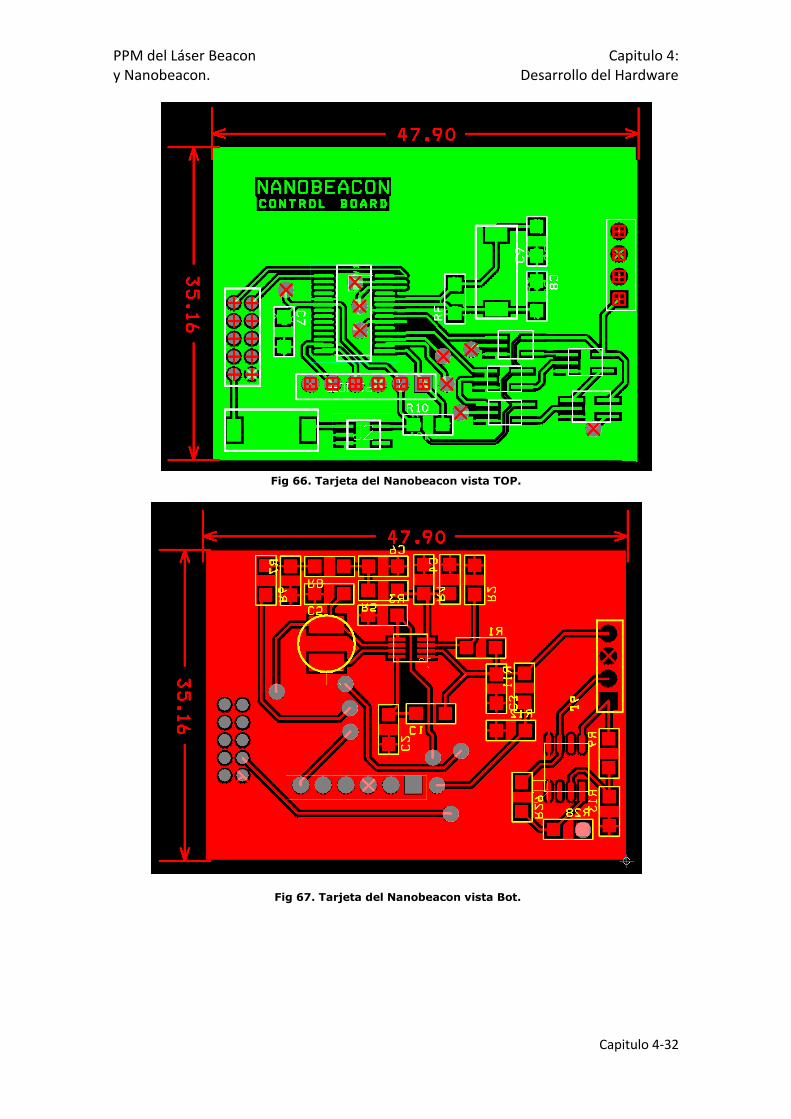
66. Placa del Nanobeacon vista TOP. ........................................ 4-32 67. Placa del Nanobeacon vista Bot. ......................................... 4-32
68. Placa Pulser del Nanobeacon. ............................................ 4-33 69. Imagen de PCWH de CCS. ................................................... 5-2
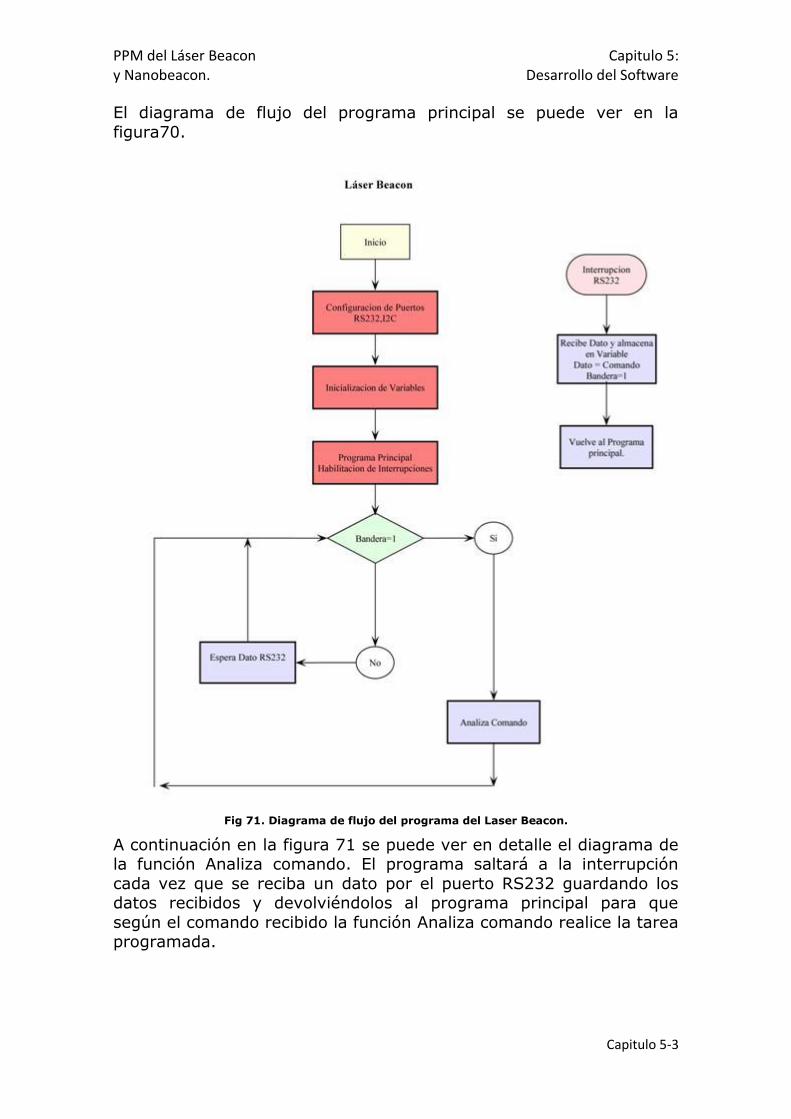
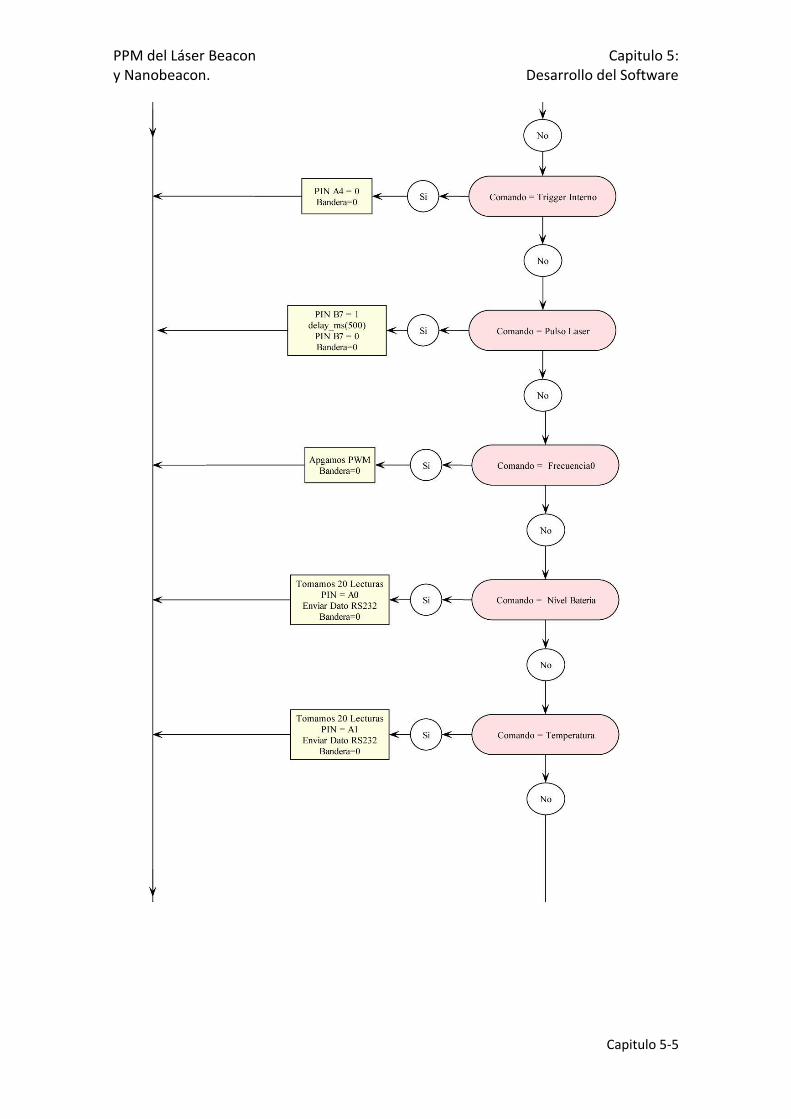
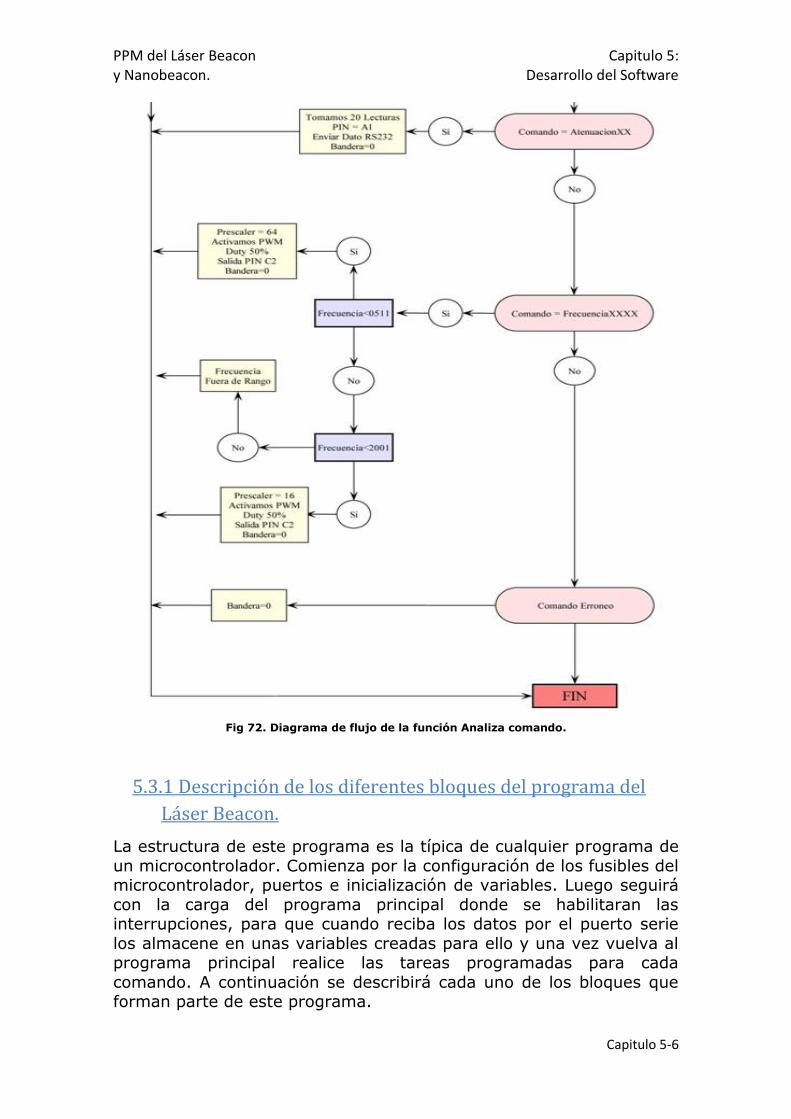
71. Diagrama de flujo del programa del Laser ............................. 5-3 72. Diagrama de flujo de la función Analiza comando ................... 5-6
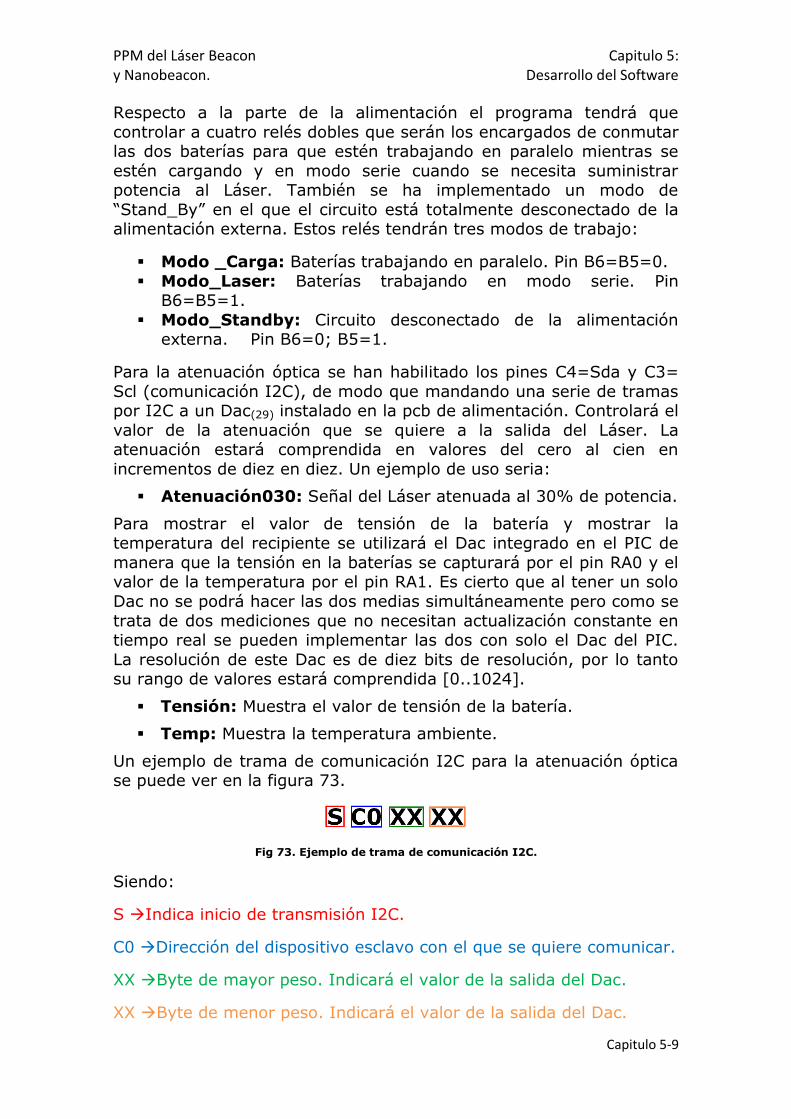
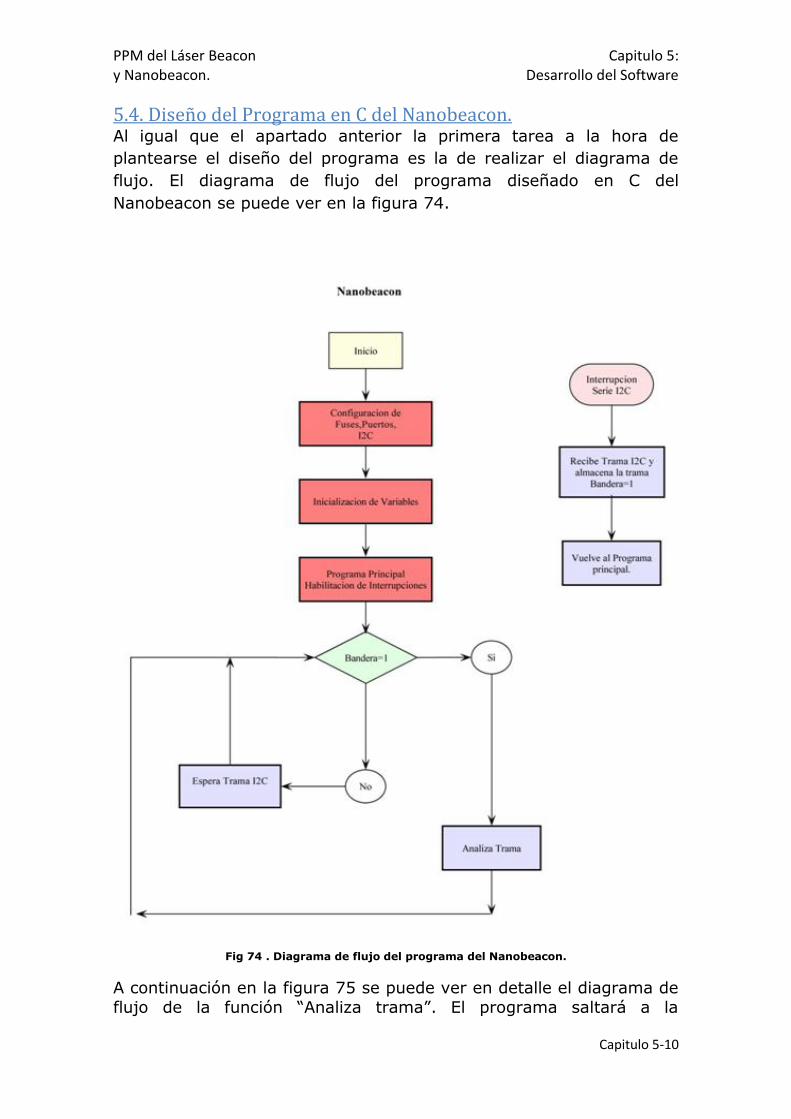
73. Ejemplo de trama de comunicación I2C. ............................... 5-9 74. Diagrama de flujo del programa del Nanobeacon. ................ 5-10
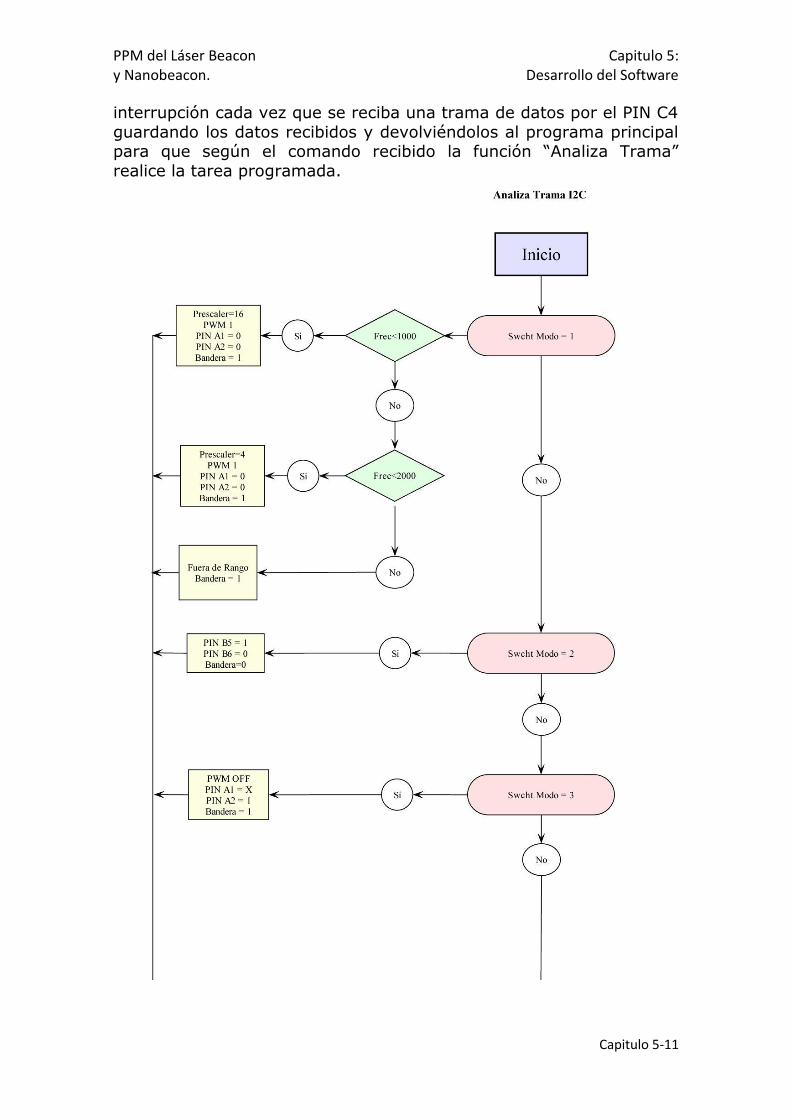
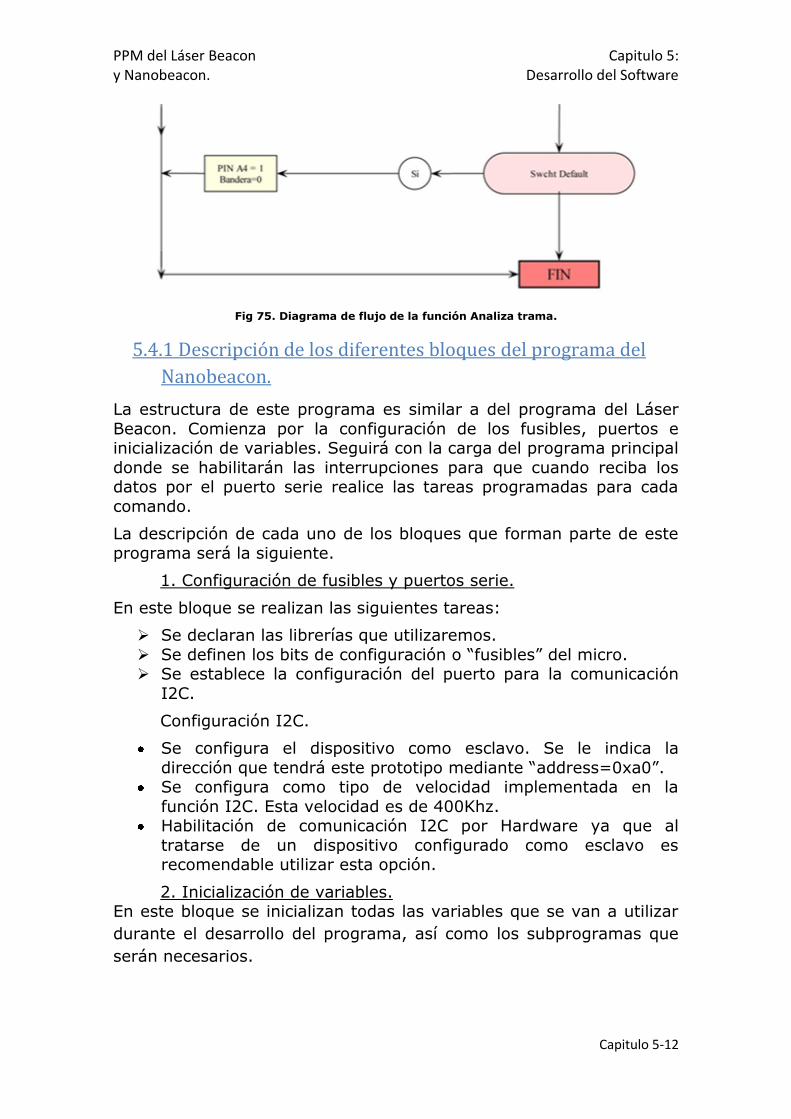
75. Diagrama de flujo de la función Analiza Trama..................... 5-12 76. Ejemplo de trama recibida. ............................................... 5-14
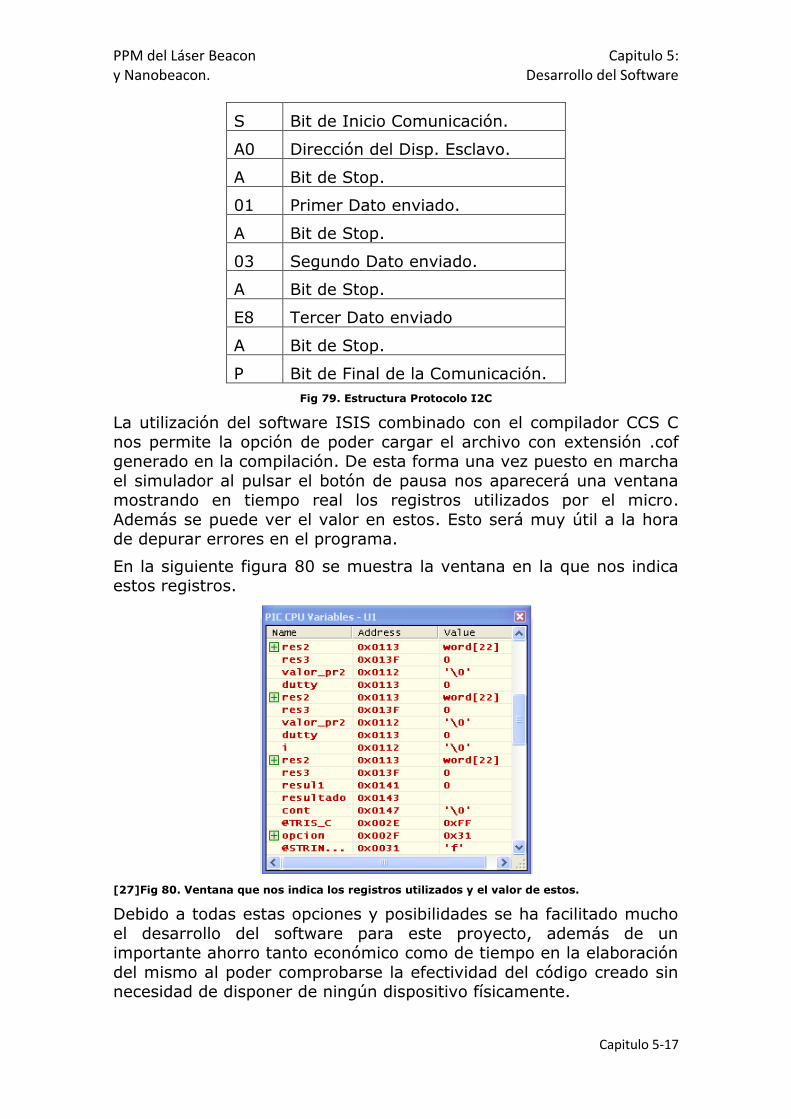
77. Ejemplo de Simulación de Comunicación I2C. ...................... 5-16 78. Trama I2C enviada. .......................................................... 5-16
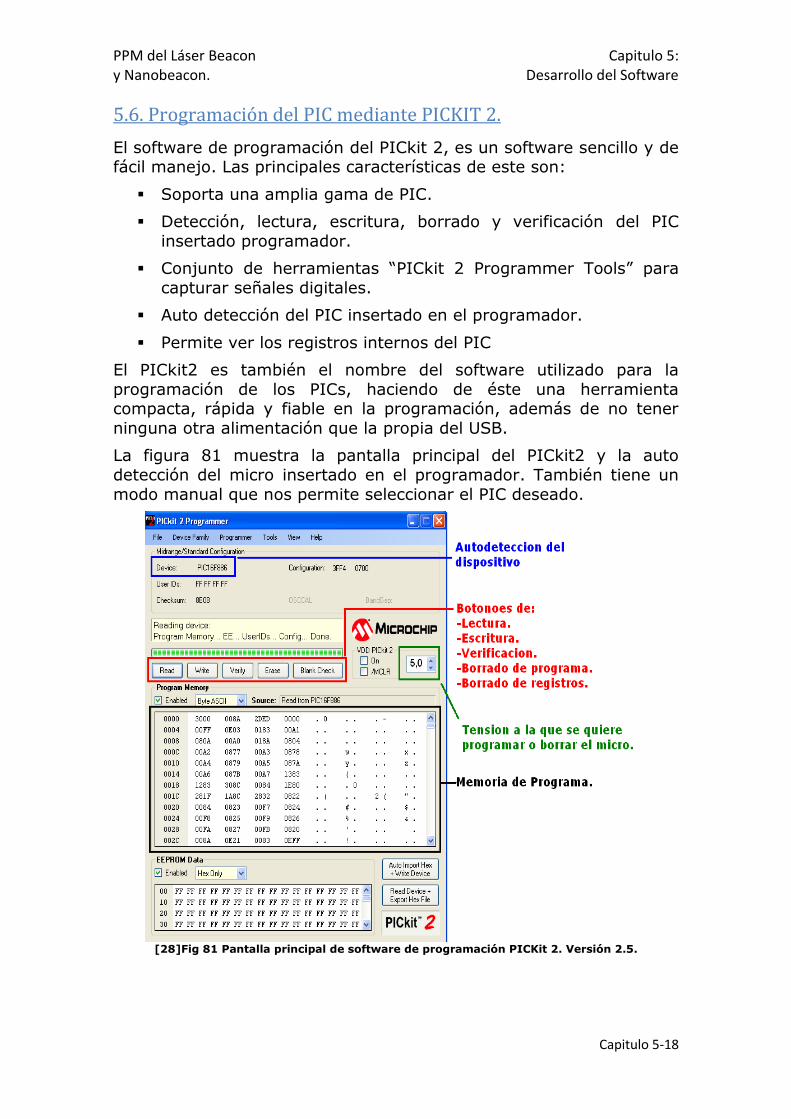
80. Ventana de informacion de utilizados. ................................. 5-17 81. Software de programación PICKit 2. Versión 2.5. ................. 5-18
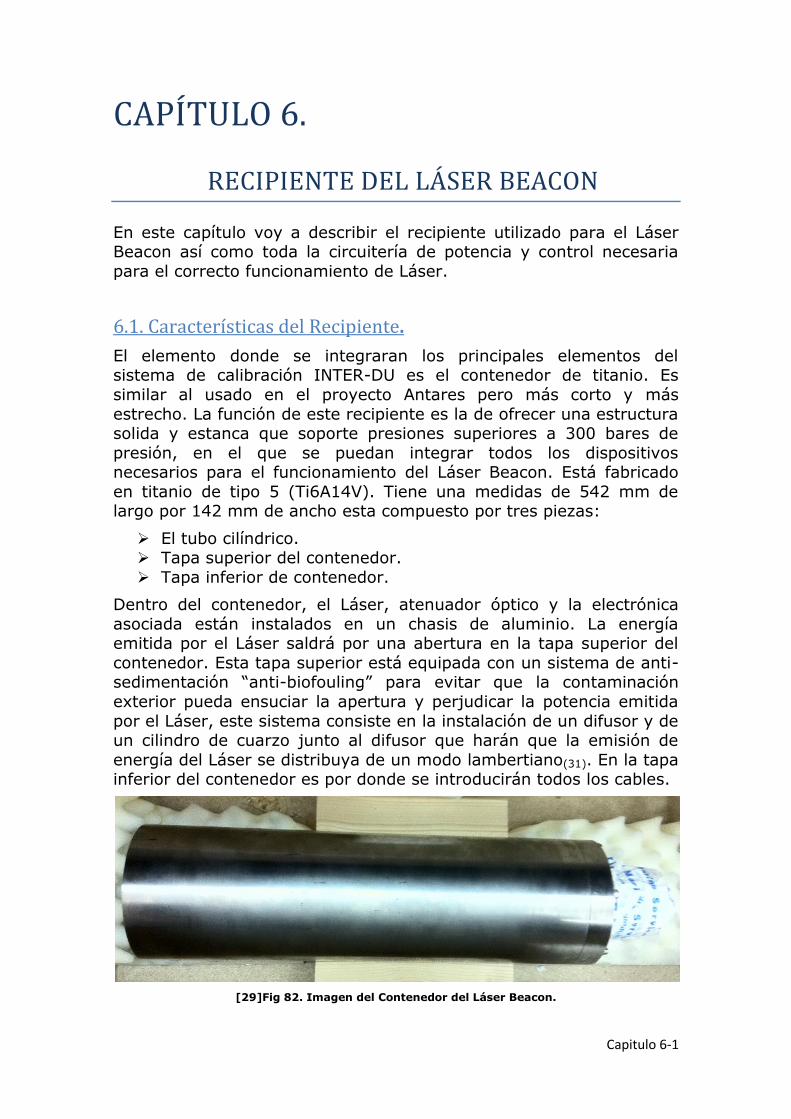
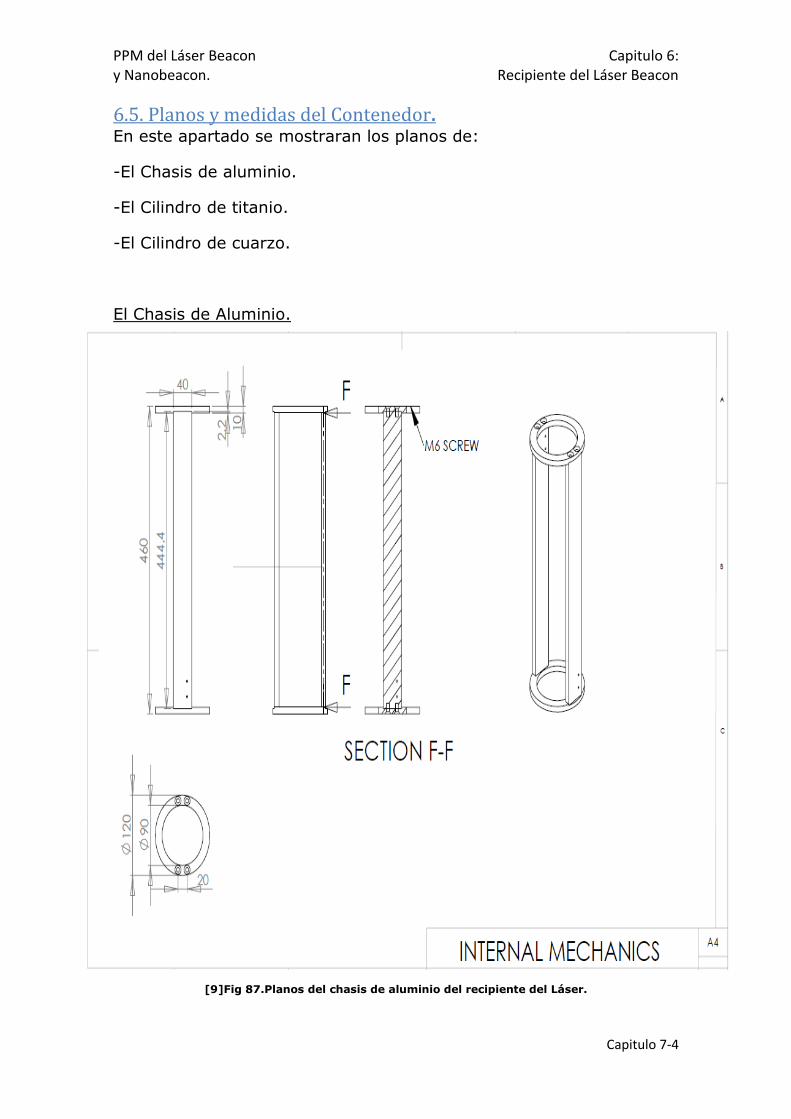
82. Imagen del Contenedor del Láser Beacon. ............................. 6-1 83. Tapas superior e inferior del cilindro del recipiente ................. 6-2
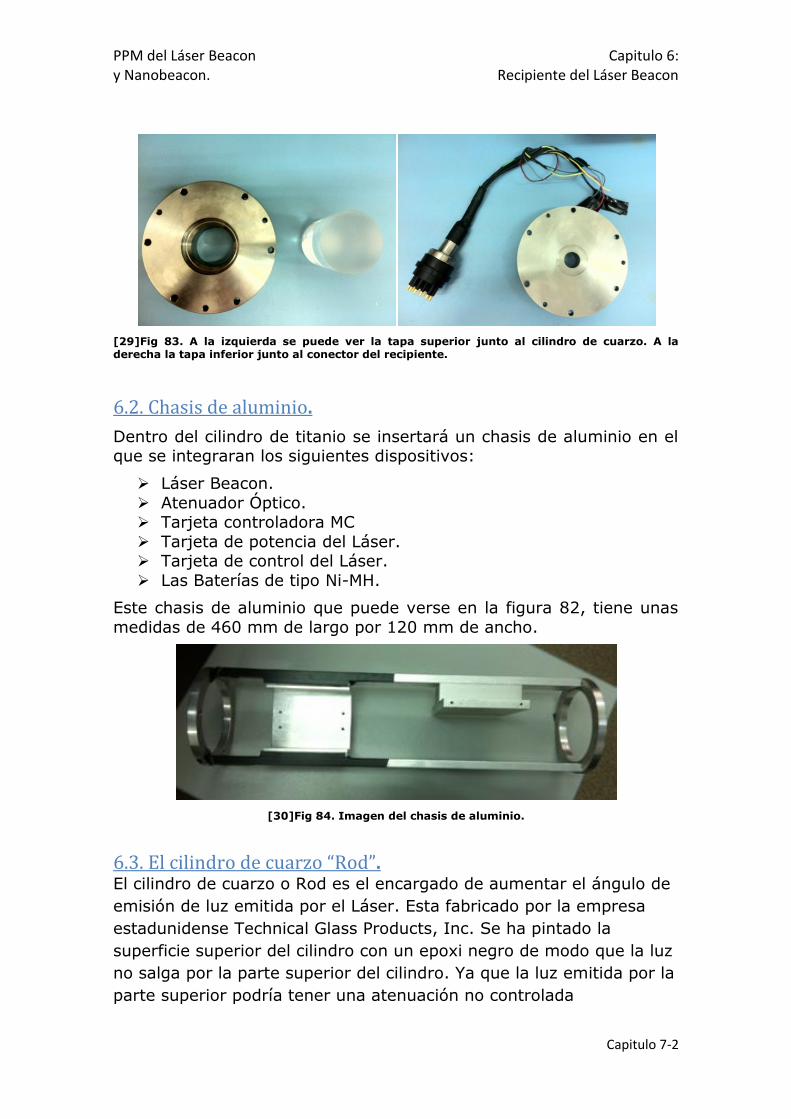
84. Imagen del chasis de aluminio. ............................................ 6-2 85. Imagen del Rod. ................................................................ 6-3
86. Conector del recipiente del Láser ......................................... 6-3 87. Planos del chasis del Láser. ................................................. 6-4
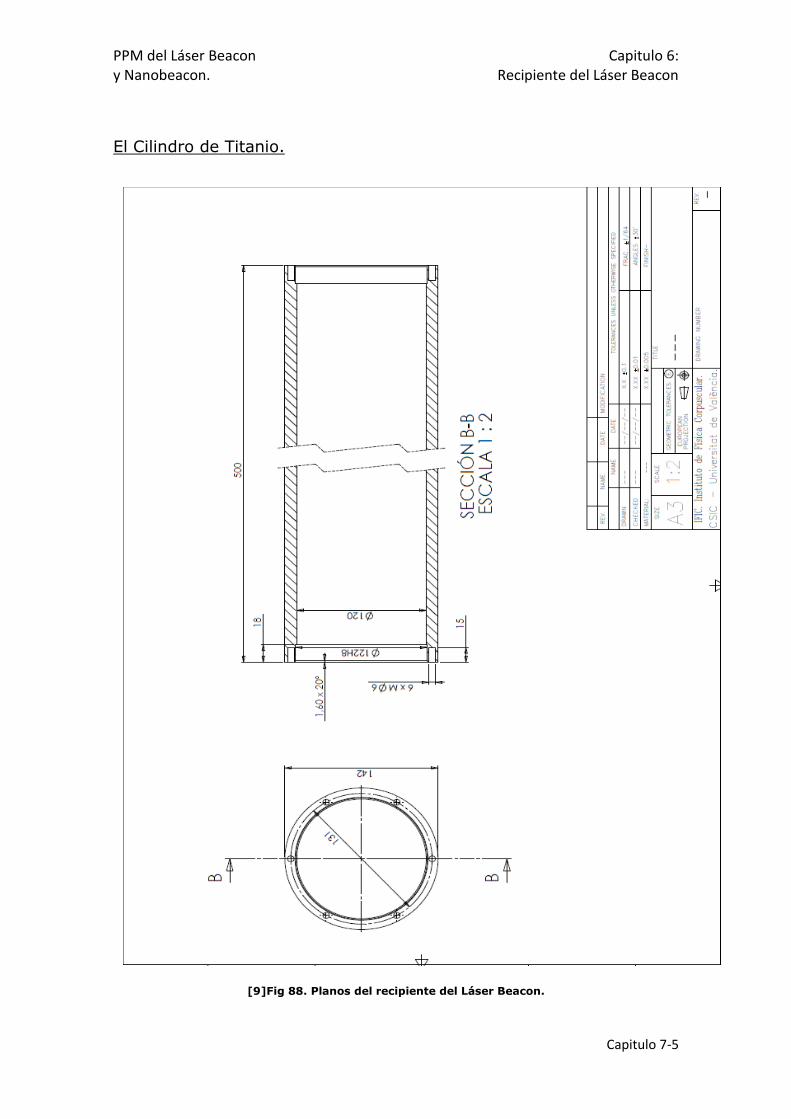
88. Planos del recipiente del Láser ............................................. 6-5 89. Planos de Tapa superior y Cilindro de Cuarzo . ....................... 6-6
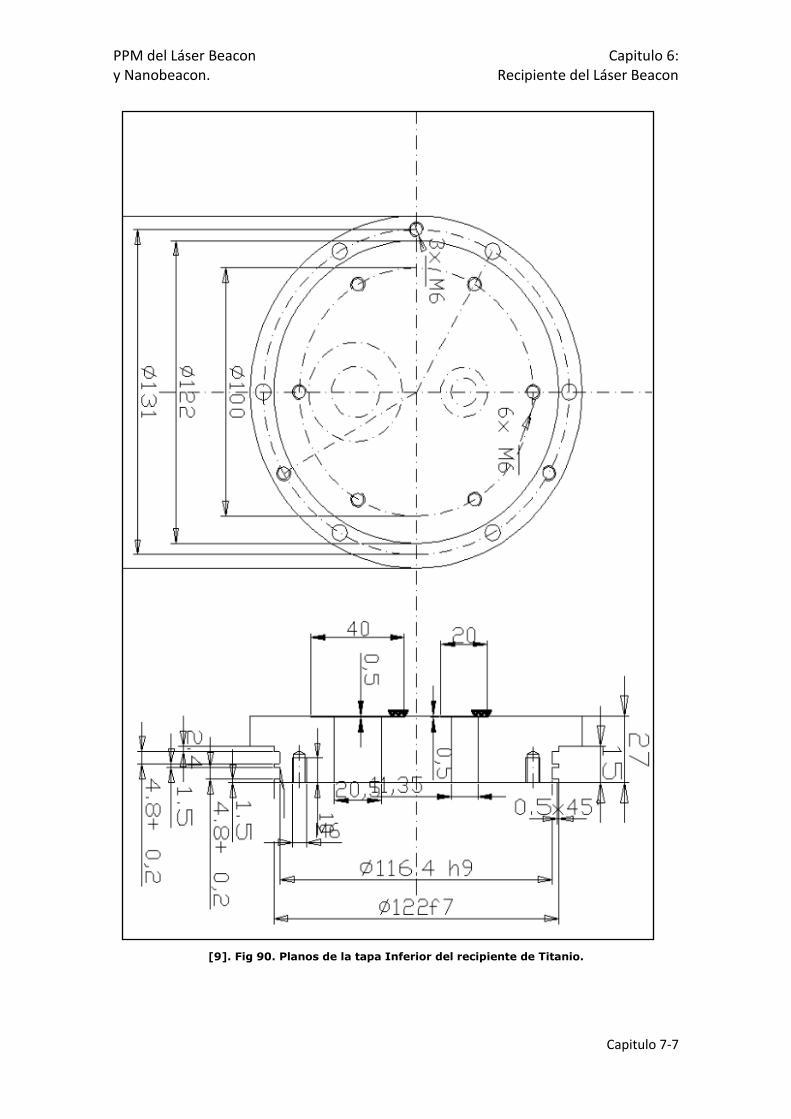
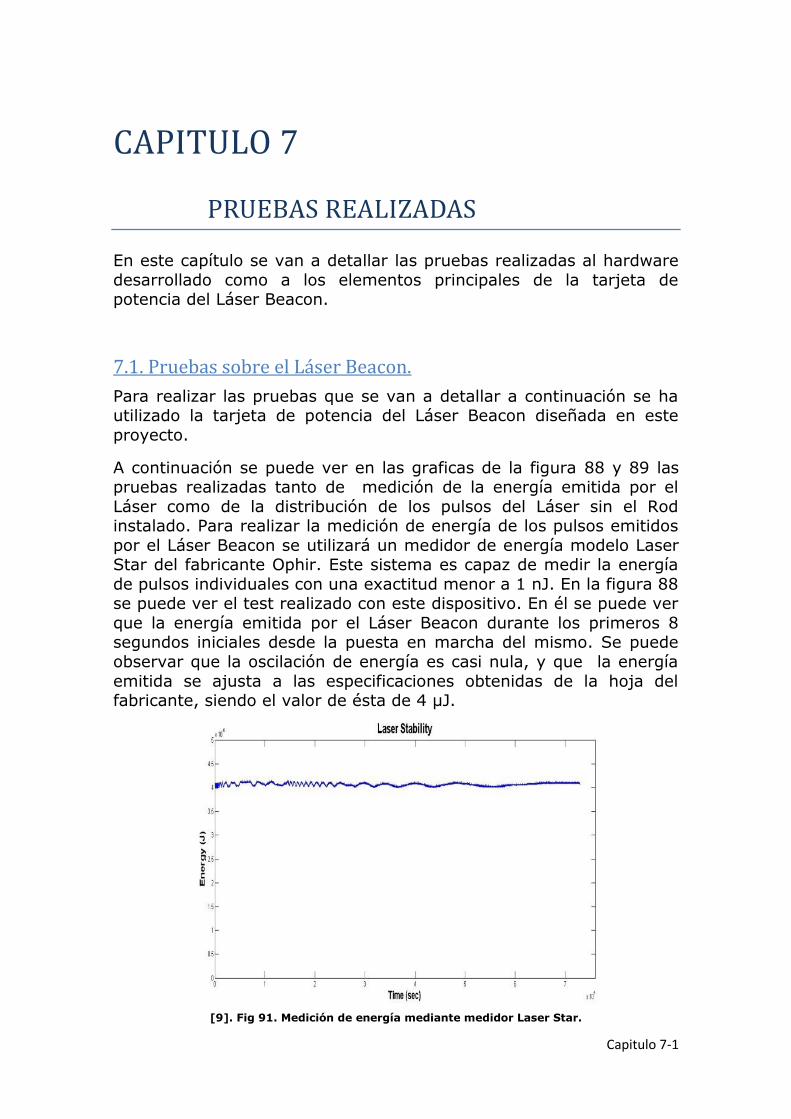
90. Planos de la tapa Inferior del recipiente de Titanio. ................ 6-7 91. Medición de energía mediante medidor Laser Star. ................. 7-1
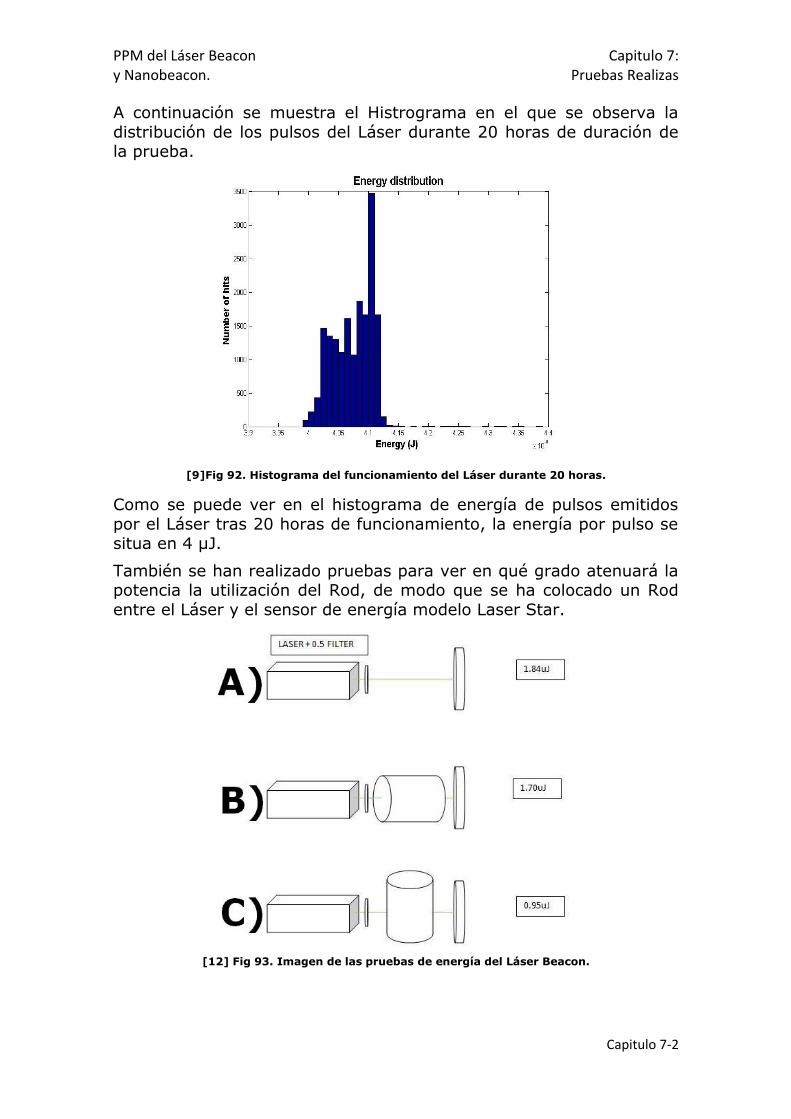
92. Histograma delLáser durante 20 horas. ................................. 7-2 93. Pruebas de energía del Láser ............................................... 7-2
6
94. Distribución de elementos para la realización de la prueba. ..... 7-3
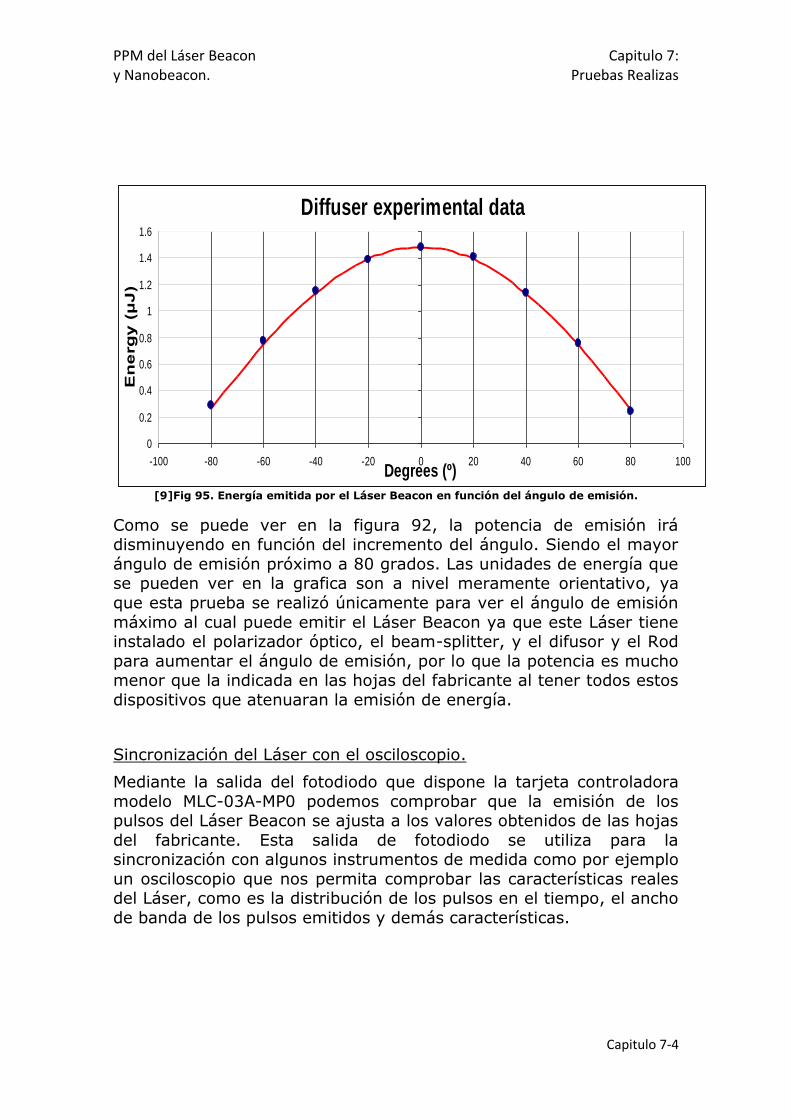
95. Energía emitida por el Láser en funcion del angulo. ................ 7-4 96. Medida del Jitter del Láser. .................................................. 7-5
97. Potencia emitida frente a Tensión Aplicada al At.Optico ........... 7-6
98. Comparativa del rise-time de los diodos analizados ................ 7-7 99. Tabla de características de los diodos Led analizados .............. 7-7
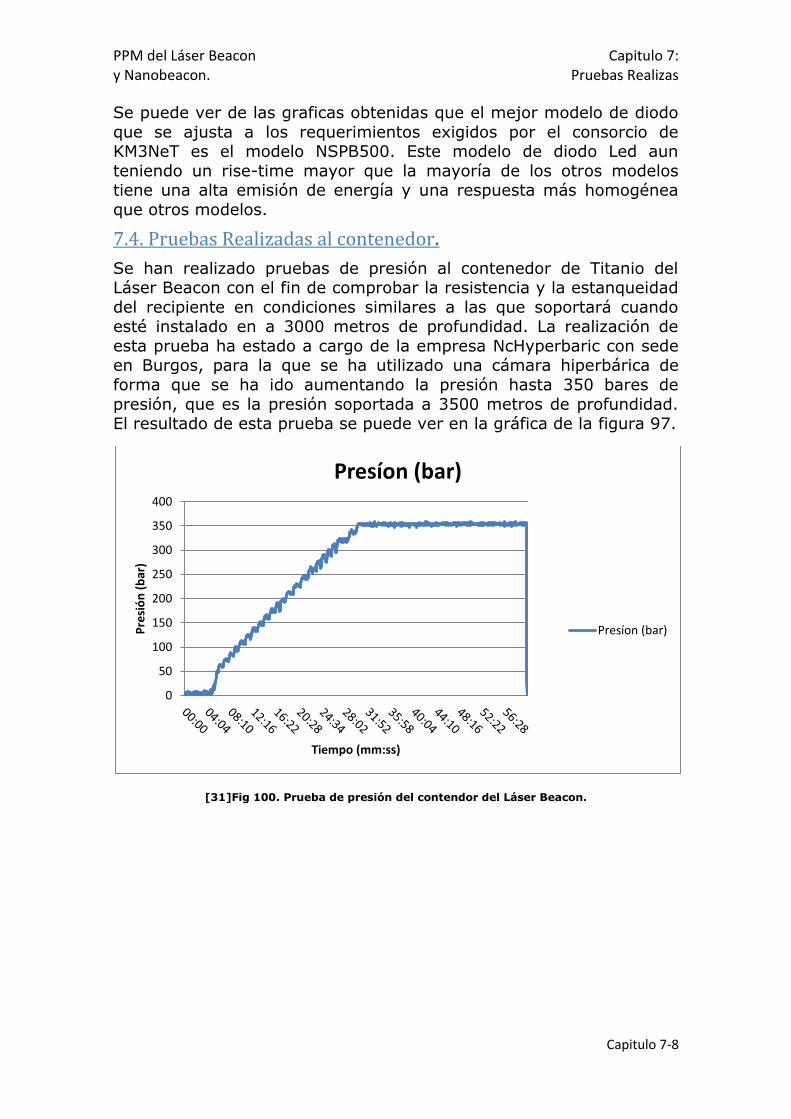
100. Prueba de presión del contendor del Láser ........................... 7-8 101. Diagrama de flujo del programada en Labview. .................... 8-2
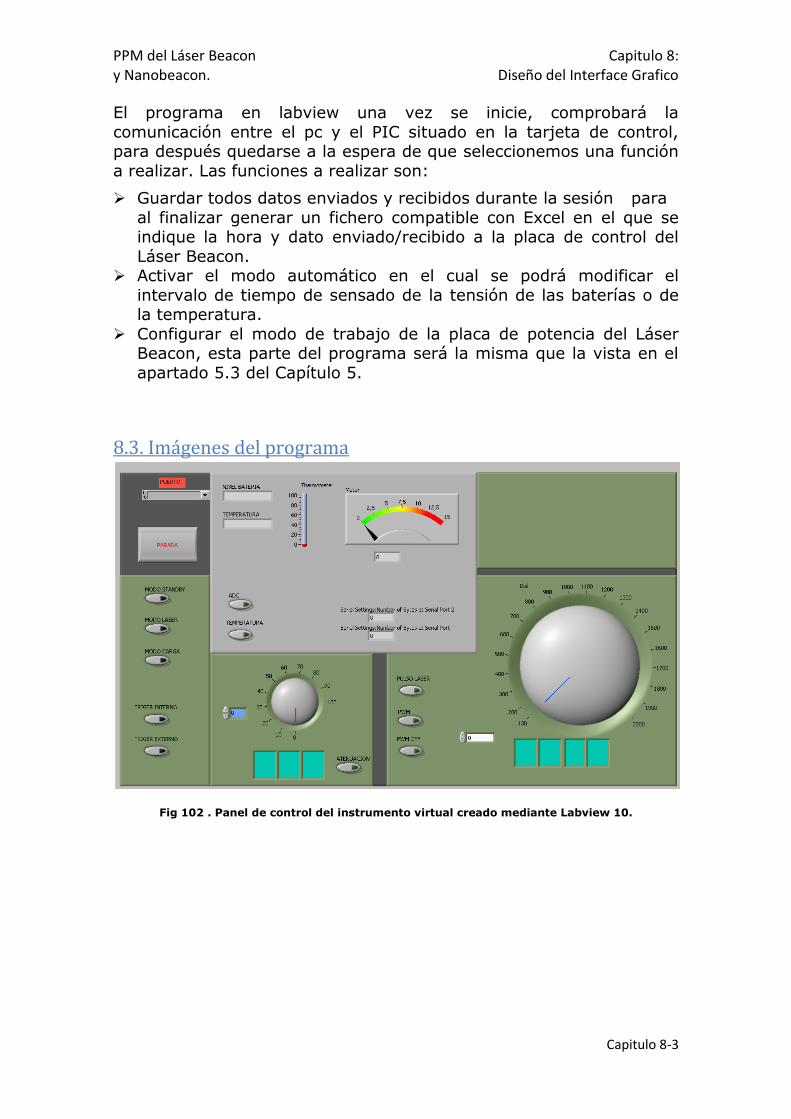
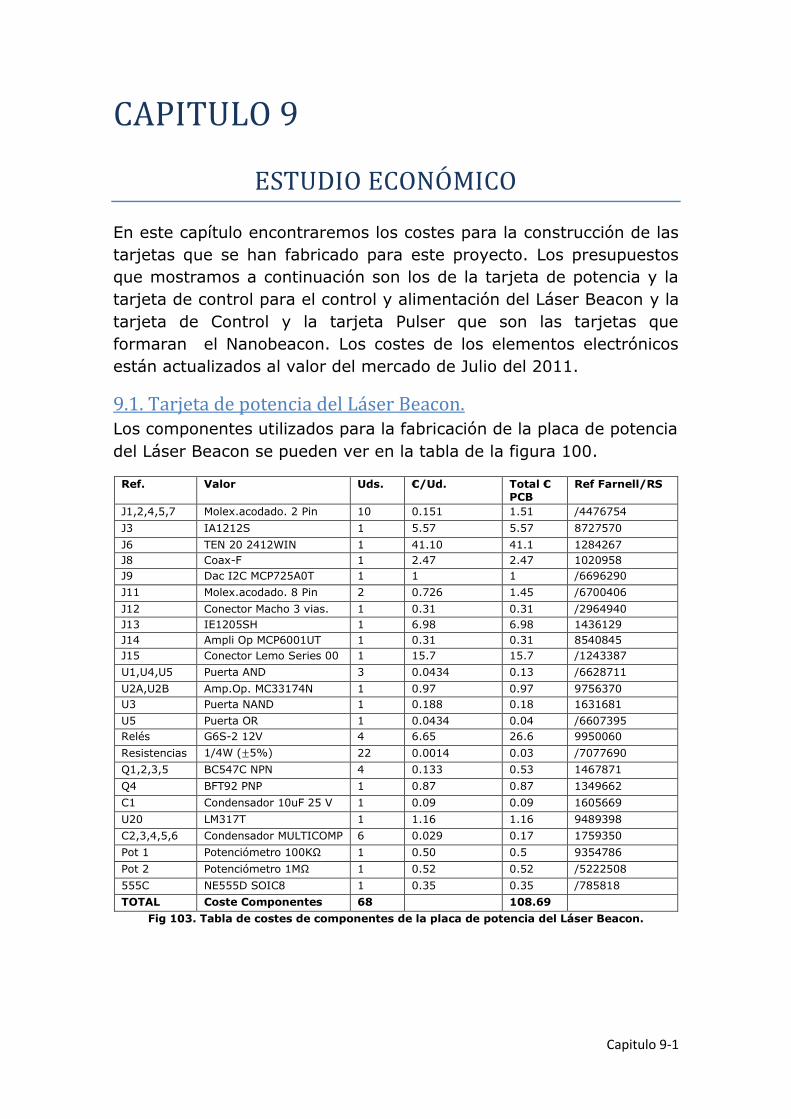
102. Panel de control del instrumento virtual. ............................. 8-3 103. Costes componentes de la placa de potencia del Láser .......... 9-1
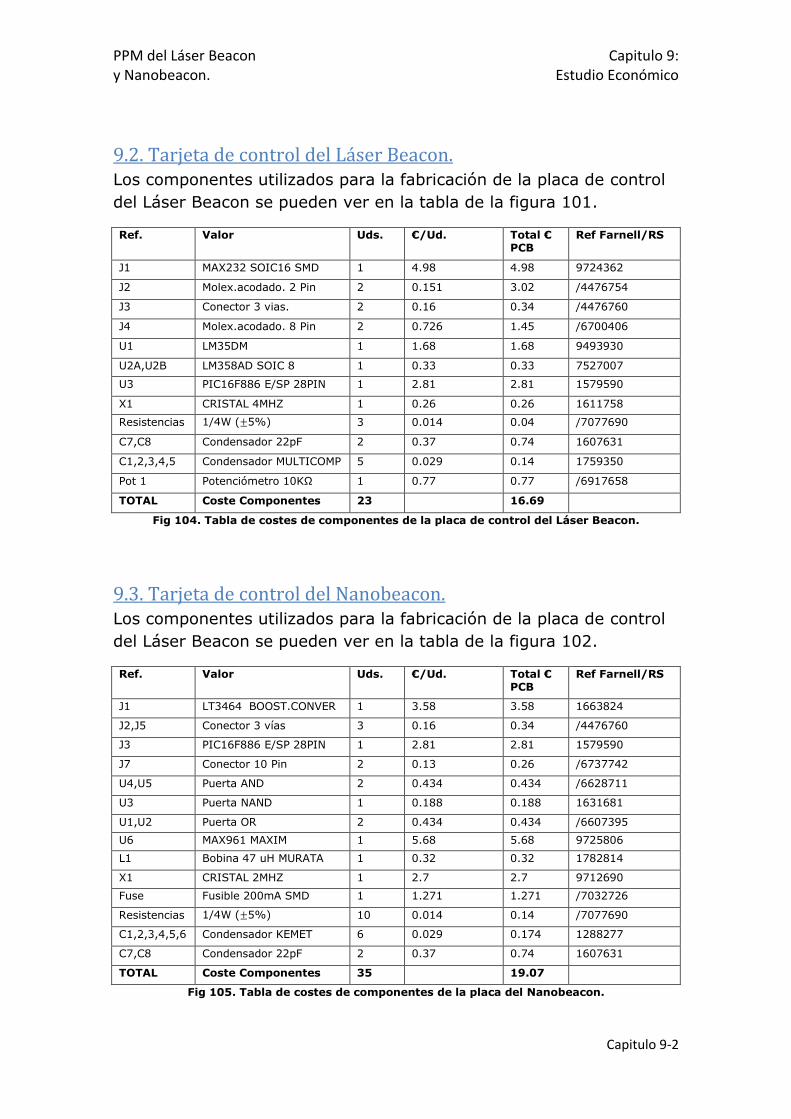
104. Costes componentes de la placa de control del Láser ............ 9-2 105. Costes componentes de la placa del Nanobeacon. ................ 9-2
106. Costes componentes de la placa Pulser del Nanobeacon. ....... 9-3
Capitulo 1-1
En el primer capítulo voy a describir los objetivos marcados al inicio
del presente proyecto así como la metodología a seguir para la realización del mismo.
1.1. Titulo del Proyecto.
Modelo de Preproducción del Control del Láser Beacon y Mejoras en el
Diseño de la Tarjeta Nanobeacon del Telescopio submarino KM3NeT.
1.2. Introducción.
El proyecto del Telescopio submarino de neutrinos KM3NeT se enmarca dentro de una nueva disciplina denominada "Física de
Astropartículas" que se sitúa en la frontera entre la "Física de Partículas", la "Astrofísica" y la "Cosmología". La idea de un
telescopio de neutrinos es similar a la de los telescopios
convencionales pero en vez de observar luz o fotones, lo que observamos son neutrinos procedentes del espacio exterior.
El telescopio de neutrinos KM3NeT consistirá en una gigantesca red tridimensional de detectores ópticos, fotomultiplicadores (PMT)
sensibles a la luz Cherenkov, y protegidos por esferas de vidrio diseñadas para resistir las altas presiones del fondo marino.
Como todo sistema electrónico de medición, necesita ser calibrado antes de su utilización, para así poder dar fiabilidad a las futuras
medidas realizadas. El telescopio de neutrinos KM3NeT contará con dos sistemas de calibración, formado bien por una serie de diodos de
tipo Led, o por el Láser Beacon. En el presente proyecto se centrará en el diseño, montaje y test del hardware que controlara el Láser
Beacon y en la mejora, montaje y test del hardware que controlara el Nanobeacon.
1.3. Objetivos.
Desarrollar y diseñar los prototipos de control del Láser Beacon y mejorar el del Nanobeacon que formaran parte fundamental en el
sistema de calibración del telescopio submarino de neutrinos KM3NeT.
PPM del Láser Beacon Capitulo 1: y Nanobeacon. Introducción
Capitulo1-2
El prototipo de control del Láser Beacon tendrá que cumplir las siguientes características:
Proporcionar alimentación y señales de control al Láser Beacon.
Proporcionar una señal trigger de niveles TTL con un rango de frecuencias comprendido entre 150 y 2000 Hz.
Seleccionar entre una señal de trigger interna (generada por el mismo), o externa que se nos proporcionara del exterior.
Control sobre el Láser Beacon mediante comunicación RS232.
Suministrar una alimentación y las señales de control sobre el atenuador óptico(Polarizador).
Implementar mediante software Labview un panel de control Virtual capaz de controlar y testear el hardware del láser
Beacon.
El prototipo para el sistema de Nanobeacon tendrá que cumplir:
Seleccionar entre una señal de trigger interna (generada por el
mismo), o externa que se nos proporcionara del exterior. Control sobre el Nanobeacon mediante comunicación I2C.
Seleccionar entre una señal de trigger interna (generada por el mismo), o externa que se nos proporcionara del exterior.
Proporcionar alimentación y señales de control al Led Beacon. Proporcionar una señal trigger de niveles TTL con un rango de
frecuencias comprendido entre 500 y 2000 Hz.
1.4. Metodología del trabajo.
La realización del presente proyecto se ha dividido en las siguientes fases:
1. Búsqueda y análisis de la información sobre composición de
neutrinos, telescopios de neutrinos, KM3NeT. 2. Estudio y análisis de soluciones posibles para la alimentación
del Láser Beacon así como análisis de los principales elementos de la tarjeta de potencia del Láser Beacon.
3. Selección de la alternativa óptima a la alimentación del láser. 4. Diseño del hardware de control del Láser Beacon.
5. Test y pruebas realizadas sobre el Hardware diseñado. 6. Mejora en el diseño del hardware del Nanobeacon.
7. Diseño del software y verificación del hardware del Láser Beacon y Nanobeacon.
8. Futuras mejoras.
PPM del Láser Beacon Capitulo 1: y Nanobeacon. Introducción
Capitulo1-3
1.5. Resumen del proyecto.
En la primera parte del proyecto se hará una breve introducción sobre que son los neutrinos y el porqué de su estudio, además se explicará
como detectar los neutrinos, que es un telescopio de Neutrinos, se hará una breve descripción del Telescopio de Neutrinos Antares que
es el precursor del proyecto KM3NeT, así como el funcionamiento y los principales elementos del telescopio KM3NeT, también se
mencionaran otros telescopios de neutrinos de similares características.
Acto seguido se describirá el sistema de comunicación RS232 y I2C
que serán necesarios para el control del hardware, además se hará un estudio teórico sobre las posibles soluciones para la alimentación
de la tarjeta de potencia del Láser Beacon.
Después se detallarán los elementos del hardware y las características principales de éstos, además de la programación del
sistema y el diseño de la interface grafica para el testeo y verificación del mismo, así como las herramientas empleadas. Justificando en
cada uno de los casos su elección, además se detallarán aquellos comandos RS232 y I2C utilizados para la configuración del sistema.
Después se detallarán las pruebas realizadas sobre los elementos
principales del diseño del Laser Beacon así como del Nanobeacon.
Finalmente se hará una mención de la documentación consultada, además de mostrar los planos, esquemas, planificacion y el coste
económico total.
1.6. Contenido del CD-ROM.
En la presente memoria se adjuntara un CD-ROM que contiene:
Copia de la memoria en formato PDF. Codigo fuente que se ha programado en los
microcontroladores.
Archivos del programa en Labview utilizado en el test del hardware.
Hojas de características de los componentes empleados. Notas de aplicación utilizadas.
Los planos de Orcad de las placas utilizadas.
Capitulo 2-1
2.1. Introducción.
En este capítulo se explicarán los conceptos necesarios para entender
la relevancia del estudio de neutrinos, que son y cómo es posible detectarlos, así como una descripción de los telescopios de neutrinos.
2.2. Que es un Neutrino.
Los neutrinos son un tipo de partículas con una masa
extraordinariamente pequeña y sin carga eléctrica, están clasificadas dentro del Modelo Estándar de las partículas elementales como
leptones(1). El leptón más conocido es el electrón, existen tres tipos de leptones cada una con un doblete formado por un leptón cargado
pudiendo ser electrón, muon o tau, y su correspondiente neutrino:
Neutrino Electrónico (Ve). Neutrino Muónico (Vµ).
Neutrino Tauónico ( ).
Los leptones no sienten la interacción "fuerte", que es la fuerza que une a los quarks(2) para formar protones y neutrones y a estos para
formar núcleos atómicos.
Casi todo lo que se conoce acerca de los objetos celestes que pueblan
el Universo procede del estudio de la luz que emiten o reflejan dichos objetos. El estudio del universo mediante los fotones tiene muchas
ventajas puesto que son estables, no tienen carga eléctrica y se producen copiosamente. Son fáciles de detectar en un amplio rango
de energías y los espectros observados aportan una detallada información sobre las características físicas y químicas de los objetos
que los emiten. Sin embargo, los fotones pueden ser absorbidos por
la materia y son incapaces de atravesar las regiones densas y calientes que constituyen el núcleo central de las estrellas, las
galaxias, los quasars(3) y otras fuentes astrofísicas de alta energía, por lo que no podemos investigar las propiedades de dichas regiones a
partir de su observación directa.
Esto se traduce en la imposibilidad de observar el Universo a
distancias mayores de cien megapársec(4) con rayos gamma de alta energía debido a que el Universo se vuelve opaco a esta radiación por
lo que las más altas energías producidas por los fenómenos violentos
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-2
del Universo no serían accesibles a nuestra observación a través de la
radiación electromagnética.
Para poder observar el interior de los objetos astrofísicos y obtener
una descripción del Universo en un amplio rango de energías, se necesita un mensajero sin carga eléctrica de manera que su
trayectoria no se vea afectada por los campos magnético estelares, que sea estable de manera que pueda llegar a la Tierra después de
recorrer enormes distancias y que interaccione débilmente de manera que sea capaz de penetrar en el interior de regiones que son opacas
a los fotones. El único candidato conocido actualmente es el neutrino.
De manera que se puede concluir que pese a la dificultad que ofrecen
para ser detectados los neutrinos son buenas partículas “mensajeras” en cuanto a la información que nos ofrecen.
2.3. Fuentes de neutrinos.
Existen diversas fuentes de neutrinos, algunas fuentes son de origen
natural como los procesos de desintegración en el núcleo solar, rayos cósmicos, supernovas, restos del Big-Bang... y otros de origen
artificial como los neutrinos generados en los reactores de las centrales nucleares. Se estima que el sol emite 2 x neutrinos por
segundo, de los cuáles la Tierra recibe 4 x por segundo y por
cm . La fuente de neutrinos “artificial” más importante es el reactor
de una central nuclear. En la figura 1 podemos ver algunas de las fuentes de neutrinos más importantes.
[1]Fig. 1 Fuentes de Neutrinos.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-3
Los más energéticos son producidos por los rayos cósmicos en
nuestra atmosfera (neutrinos atmosféricos) o fuera de ella. El término rayo cósmico es utilizado para referirse a la radiación de alta energía
que llega a la tierra desde el espacio. Los rayos cósmicos están compuestos en un 90% por protones (núcleos de hidrogeno) y en un
9% de partículas α (se denomina partícula alfa al núcleo de Helio, está constituido por dos protones y dos neutrones).
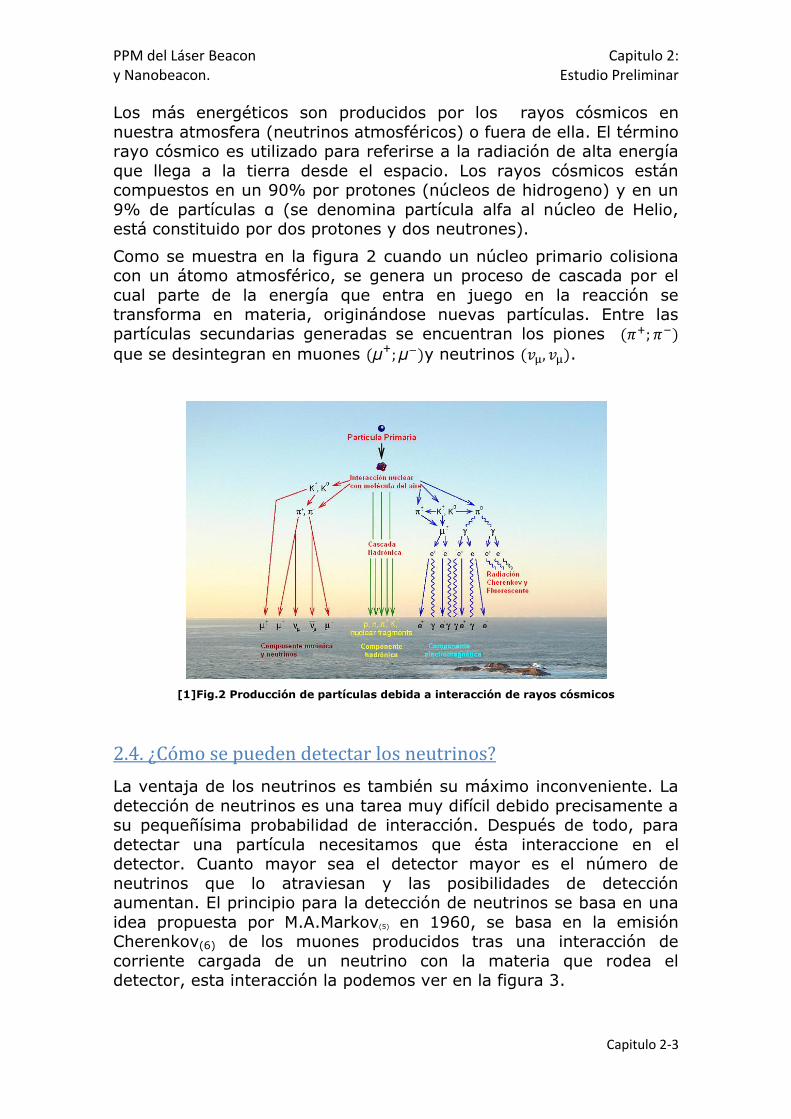
Como se muestra en la figura 2 cuando un núcleo primario colisiona con un átomo atmosférico, se genera un proceso de cascada por el
cual parte de la energía que entra en juego en la reacción se transforma en materia, originándose nuevas partículas. Entre las partículas secundarias generadas se encuentran los piones
que se desintegran en muones y neutrinos .
[1]Fig.2 Producción de partículas debida a interacción de rayos cósmicos
2.4. ¿Cómo se pueden detectar los neutrinos?
La ventaja de los neutrinos es también su máximo inconveniente. La
detección de neutrinos es una tarea muy difícil debido precisamente a su pequeñísima probabilidad de interacción. Después de todo, para
detectar una partícula necesitamos que ésta interaccione en el detector. Cuanto mayor sea el detector mayor es el número de
neutrinos que lo atraviesan y las posibilidades de detección aumentan. El principio para la detección de neutrinos se basa en una
idea propuesta por M.A.Markov(5) en 1960, se basa en la emisión Cherenkov(6) de los muones producidos tras una interacción de
corriente cargada de un neutrino con la materia que rodea el detector, esta interacción la podemos ver en la figura 3.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-4
[1]Fig. 3 .Radiación Cherenkov producida de la interacción de los muones con los neutrinos.
En la figura 3 se observa que la radiación Cherenkov es producida por los muones resultantes de la interacción de un neutrino con la
atmosfera en un primer contacto y con la tierra.
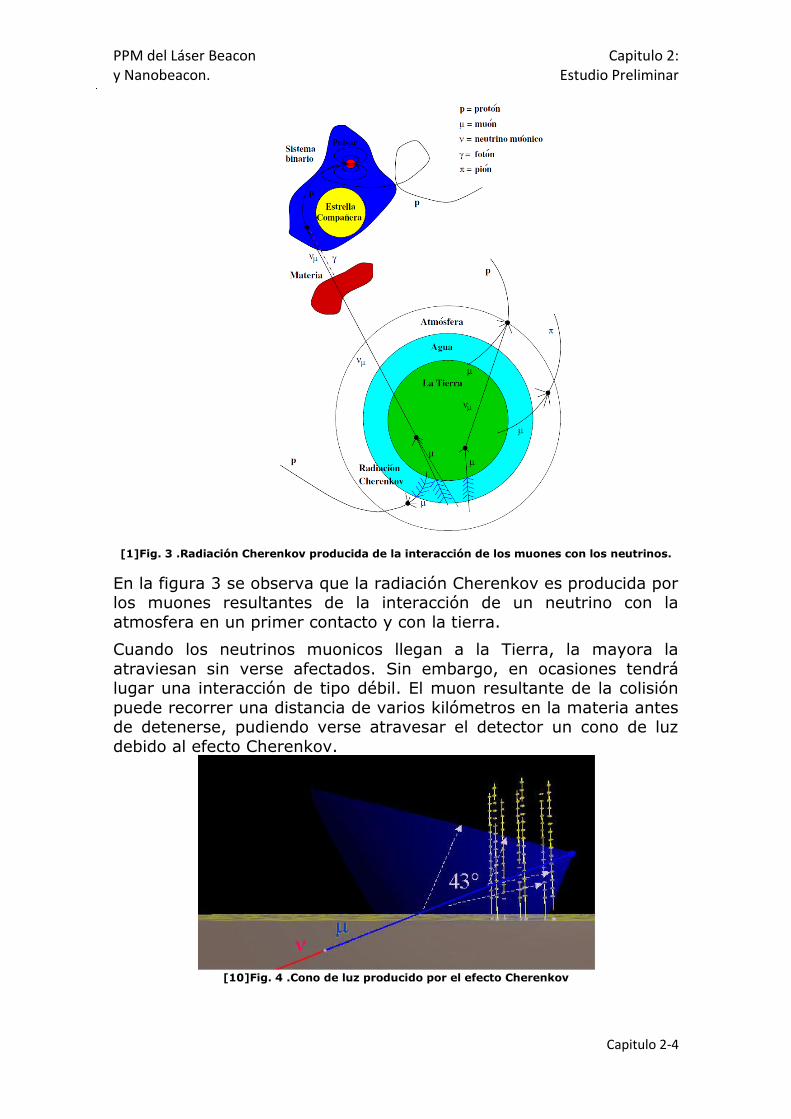
Cuando los neutrinos muonicos llegan a la Tierra, la mayora la
atraviesan sin verse afectados. Sin embargo, en ocasiones tendrá lugar una interacción de tipo débil. El muon resultante de la colisión
puede recorrer una distancia de varios kilómetros en la materia antes de detenerse, pudiendo verse atravesar el detector un cono de luz
debido al efecto Cherenkov.
[10]Fig. 4 .Cono de luz producido por el efecto Cherenkov
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-5
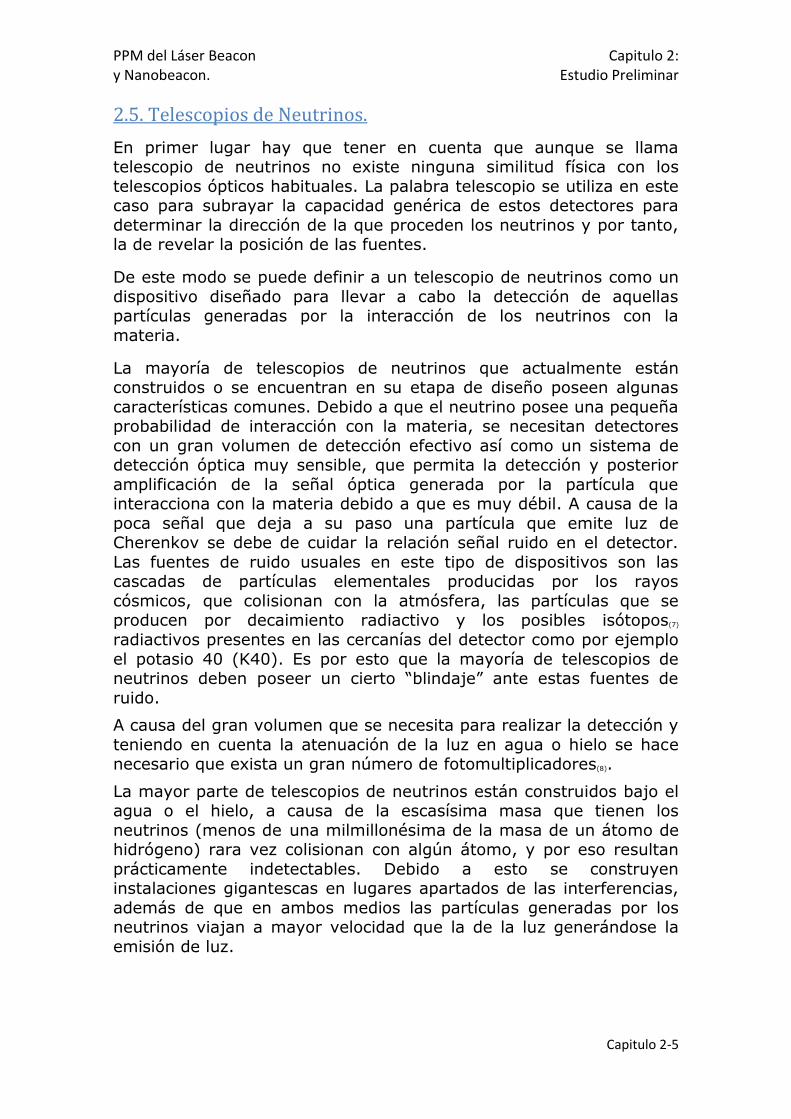
2.5. Telescopios de Neutrinos.
En primer lugar hay que tener en cuenta que aunque se llama telescopio de neutrinos no existe ninguna similitud física con los
telescopios ópticos habituales. La palabra telescopio se utiliza en este caso para subrayar la capacidad genérica de estos detectores para
determinar la dirección de la que proceden los neutrinos y por tanto, la de revelar la posición de las fuentes.
De este modo se puede definir a un telescopio de neutrinos como un
dispositivo diseñado para llevar a cabo la detección de aquellas partículas generadas por la interacción de los neutrinos con la
materia.
La mayoría de telescopios de neutrinos que actualmente están construidos o se encuentran en su etapa de diseño poseen algunas
características comunes. Debido a que el neutrino posee una pequeña probabilidad de interacción con la materia, se necesitan detectores
con un gran volumen de detección efectivo así como un sistema de detección óptica muy sensible, que permita la detección y posterior
amplificación de la señal óptica generada por la partícula que interacciona con la materia debido a que es muy débil. A causa de la
poca señal que deja a su paso una partícula que emite luz de Cherenkov se debe de cuidar la relación señal ruido en el detector.
Las fuentes de ruido usuales en este tipo de dispositivos son las cascadas de partículas elementales producidas por los rayos
cósmicos, que colisionan con la atmósfera, las partículas que se producen por decaimiento radiactivo y los posibles isótopos(7)
radiactivos presentes en las cercanías del detector como por ejemplo
el potasio 40 (K40). Es por esto que la mayoría de telescopios de neutrinos deben poseer un cierto “blindaje” ante estas fuentes de
ruido.
A causa del gran volumen que se necesita para realizar la detección y
teniendo en cuenta la atenuación de la luz en agua o hielo se hace necesario que exista un gran número de fotomultiplicadores(8).
La mayor parte de telescopios de neutrinos están construidos bajo el agua o el hielo, a causa de la escasísima masa que tienen los
neutrinos (menos de una milmillonésima de la masa de un átomo de hidrógeno) rara vez colisionan con algún átomo, y por eso resultan
prácticamente indetectables. Debido a esto se construyen instalaciones gigantescas en lugares apartados de las interferencias,
además de que en ambos medios las partículas generadas por los neutrinos viajan a mayor velocidad que la de la luz generándose la
emisión de luz.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-6
2.5.1 Telescopio de neutrinos Antares (Astronomy a Neutrino
Telescope y Abyss ambientales RES).
Antares que es el primer telescopio de neutrinos submarinos en el
hemisferio norte, es el precursor del telescopio KM3NeT. Por este motivo gran parte de la tecnología que se instalara en KM3NeT, ya ha
sido probada en Antares. Este es un detector de neutrinos que tiene dos objetivos principales, la astronomía de alta energía y la búsqueda
de materia oscura.
Está compuesto por 12 líneas, en cada línea tiene 25 pisos de altura y
se han instalado setenta y cinco fotomultiplicadores (PMT) con un gran fotocátodo(9) que optimiza la recogida de luz. Las líneas se
mantienen en posición vertical por un peso (dead weight) en su extremo inferior y por boyas en el extremo superior. Su longitud será
de unos 420 metros. La parte activa de la línea comienza a unos 100 por encima del fondo del mar para evitar el fango y la suciedad del
fondo que pueden ser removidos por las corrientes, y dejar recorrido
suficiente para la emisión de los primeros fotones Cherenkov.
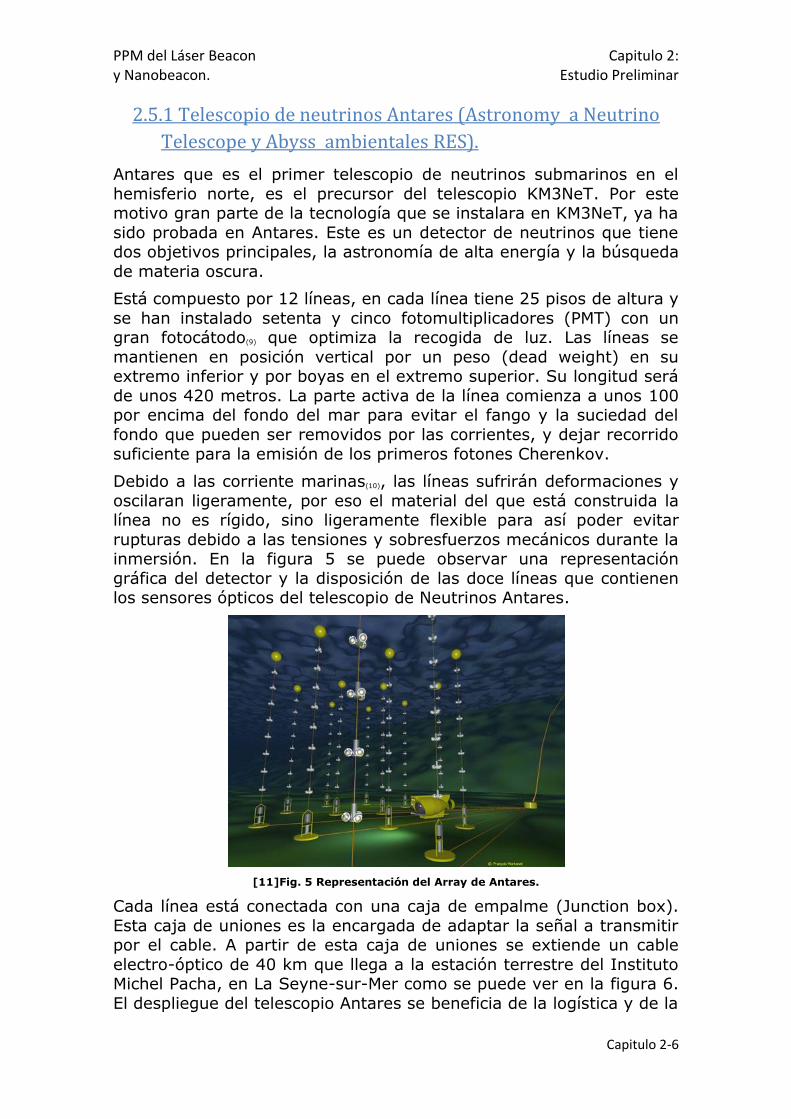
Debido a las corriente marinas(10), las líneas sufrirán deformaciones y
oscilaran ligeramente, por eso el material del que está construida la línea no es rígido, sino ligeramente flexible para así poder evitar
rupturas debido a las tensiones y sobresfuerzos mecánicos durante la inmersión. En la figura 5 se puede observar una representación
gráfica del detector y la disposición de las doce líneas que contienen los sensores ópticos del telescopio de Neutrinos Antares.
[11]Fig. 5 Representación del Array de Antares.
Cada línea está conectada con una caja de empalme (Junction box).
Esta caja de uniones es la encargada de adaptar la señal a transmitir por el cable. A partir de esta caja de uniones se extiende un cable
electro-óptico de 40 km que llega a la estación terrestre del Instituto Michel Pacha, en La Seyne-sur-Mer como se puede ver en la figura 6.
El despliegue del telescopio Antares se beneficia de la logística y de la
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-7
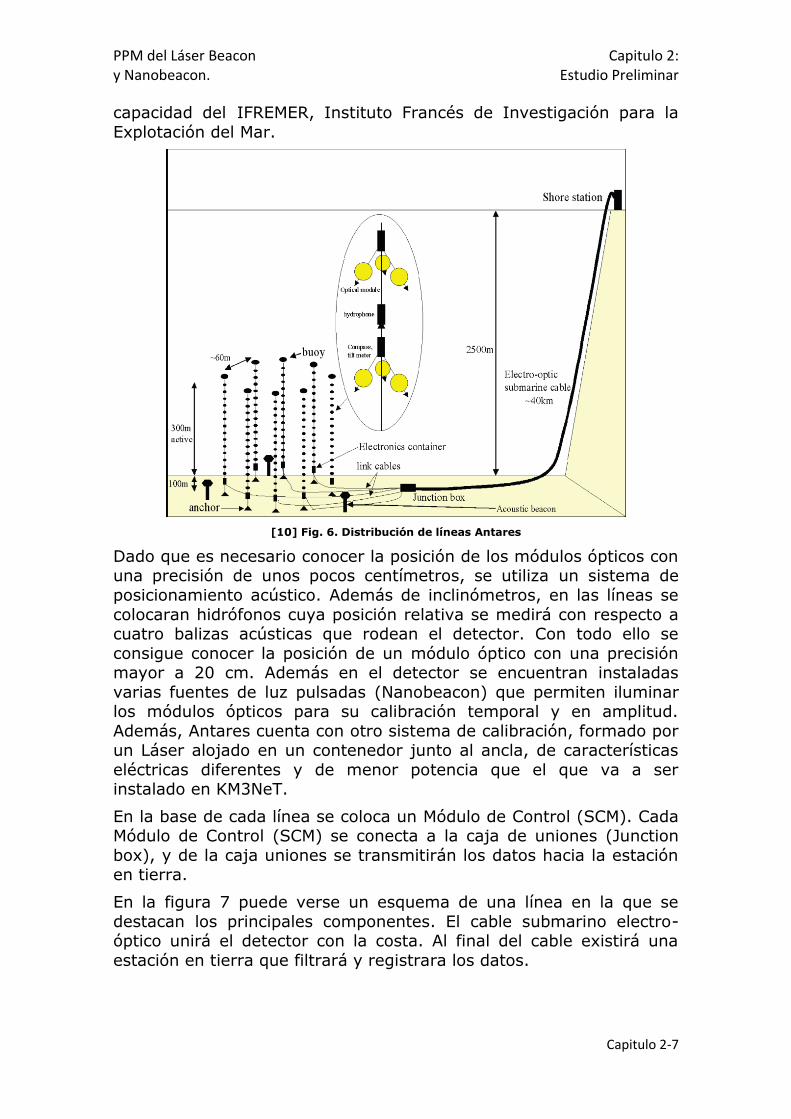
capacidad del IFREMER, Instituto Francés de Investigación para la
Explotación del Mar.
[10] Fig. 6. Distribución de líneas Antares
Dado que es necesario conocer la posición de los módulos ópticos con una precisión de unos pocos centímetros, se utiliza un sistema de
posicionamiento acústico. Además de inclinómetros, en las líneas se
colocaran hidrófonos cuya posición relativa se medirá con respecto a cuatro balizas acústicas que rodean el detector. Con todo ello se
consigue conocer la posición de un módulo óptico con una precisión mayor a 20 cm. Además en el detector se encuentran instaladas
varias fuentes de luz pulsadas (Nanobeacon) que permiten iluminar los módulos ópticos para su calibración temporal y en amplitud.
Además, Antares cuenta con otro sistema de calibración, formado por un Láser alojado en un contenedor junto al ancla, de características
eléctricas diferentes y de menor potencia que el que va a ser instalado en KM3NeT.
En la base de cada línea se coloca un Módulo de Control (SCM). Cada Módulo de Control (SCM) se conecta a la caja de uniones (Junction
box), y de la caja uniones se transmitirán los datos hacia la estación en tierra.
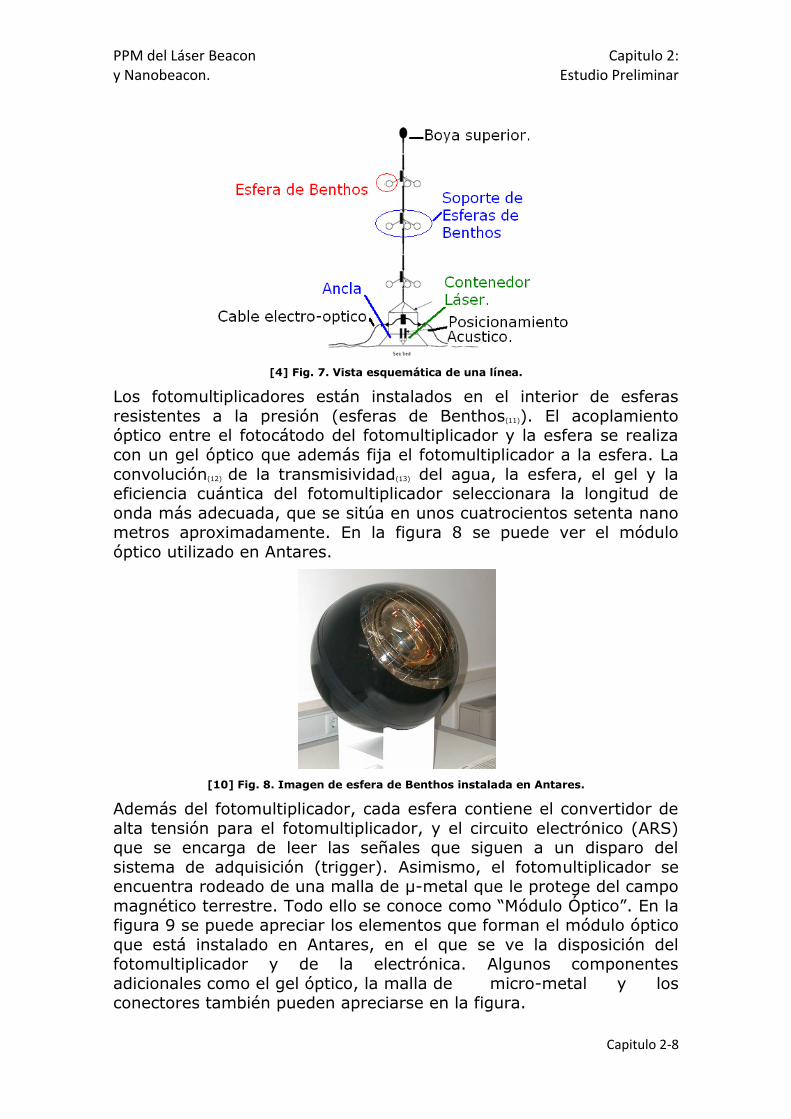
En la figura 7 puede verse un esquema de una línea en la que se
destacan los principales componentes. El cable submarino electro-óptico unirá el detector con la costa. Al final del cable existirá una
estación en tierra que filtrará y registrara los datos.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-8
[4] Fig. 7. Vista esquemática de una línea.
Los fotomultiplicadores están instalados en el interior de esferas
resistentes a la presión (esferas de Benthos(11)). El acoplamiento óptico entre el fotocátodo del fotomultiplicador y la esfera se realiza
con un gel óptico que además fija el fotomultiplicador a la esfera. La
convolución(12) de la transmisividad(13) del agua, la esfera, el gel y la eficiencia cuántica del fotomultiplicador seleccionara la longitud de
onda más adecuada, que se sitúa en unos cuatrocientos setenta nano metros aproximadamente. En la figura 8 se puede ver el módulo
óptico utilizado en Antares.
[10] Fig. 8. Imagen de esfera de Benthos instalada en Antares.
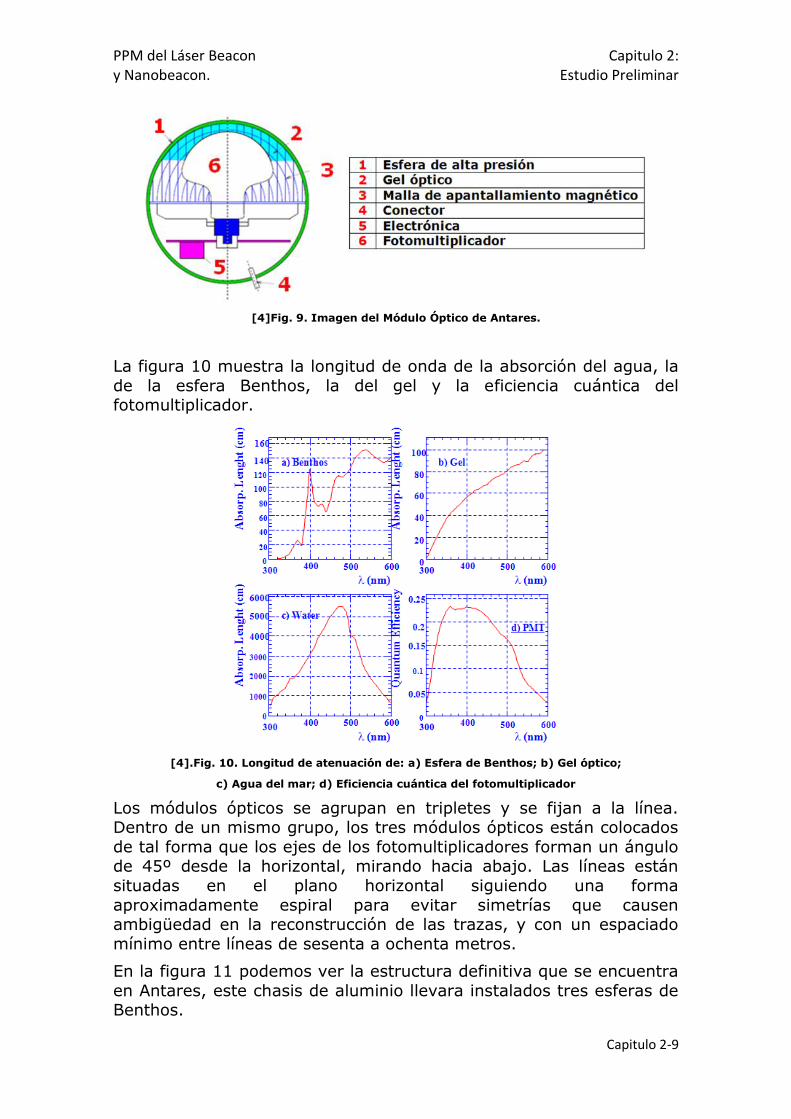
Además del fotomultiplicador, cada esfera contiene el convertidor de
alta tensión para el fotomultiplicador, y el circuito electrónico (ARS) que se encarga de leer las señales que siguen a un disparo del
sistema de adquisición (trigger). Asimismo, el fotomultiplicador se encuentra rodeado de una malla de µ-metal que le protege del campo
magnético terrestre. Todo ello se conoce como “Módulo Óptico”. En la figura 9 se puede apreciar los elementos que forman el módulo óptico
que está instalado en Antares, en el que se ve la disposición del fotomultiplicador y de la electrónica. Algunos componentes
adicionales como el gel óptico, la malla de micro-metal y los conectores también pueden apreciarse en la figura.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-9
[4]Fig. 9. Imagen del Módulo Óptico de Antares.
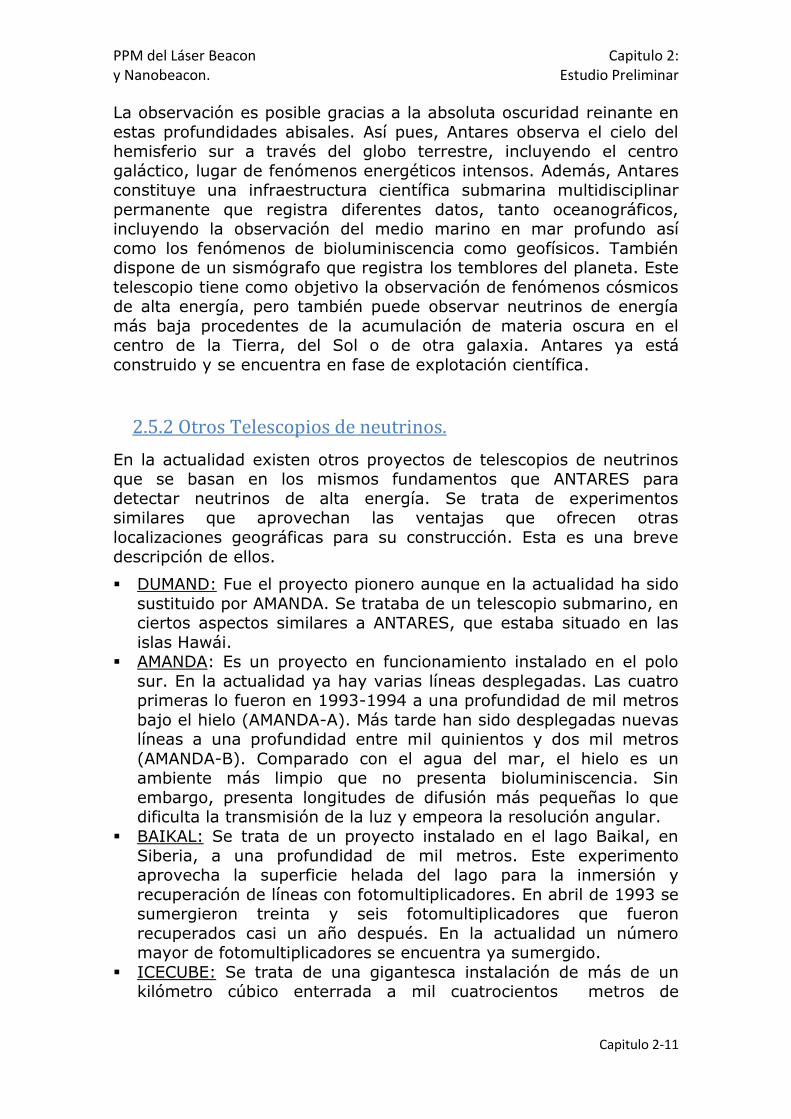
La figura 10 muestra la longitud de onda de la absorción del agua, la
de la esfera Benthos, la del gel y la eficiencia cuántica del fotomultiplicador.
[4].Fig. 10. Longitud de atenuación de: a) Esfera de Benthos; b) Gel óptico;
c) Agua del mar; d) Eficiencia cuántica del fotomultiplicador
Los módulos ópticos se agrupan en tripletes y se fijan a la línea. Dentro de un mismo grupo, los tres módulos ópticos están colocados
de tal forma que los ejes de los fotomultiplicadores forman un ángulo de 45º desde la horizontal, mirando hacia abajo. Las líneas están
situadas en el plano horizontal siguiendo una forma
aproximadamente espiral para evitar simetrías que causen ambigüedad en la reconstrucción de las trazas, y con un espaciado
mínimo entre líneas de sesenta a ochenta metros.
En la figura 11 podemos ver la estructura definitiva que se encuentra
en Antares, este chasis de aluminio llevara instalados tres esferas de Benthos.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-10
[12]Fig.11 Estructura con sus tres esferas de Benthos.
Estos fotomultiplicadores, son los ojos de Antares, utilizan un gran volumen de agua de mar para observar la estela de luces
extremadamente débil producida por los muones “ascendentes” debido al efecto Cherenkov. Estos muones son el resultado de la
interacción con la corteza terrestre de los neutrinos que han atravesado la Tierra. En la figura 12 se puede ver una imagen de la
pantalla de control remoto de Antares, en el que se observan las 12 líneas de detección así como la reconstrucción de la trayectoria de los
neutrinos, la distancia recorrida y la intensidad.
[12]Fig 12. Reconstrucción de la toma de datos del Telescopio de Neutrinos Antares.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-11
La observación es posible gracias a la absoluta oscuridad reinante en
estas profundidades abisales. Así pues, Antares observa el cielo del hemisferio sur a través del globo terrestre, incluyendo el centro
galáctico, lugar de fenómenos energéticos intensos. Además, Antares constituye una infraestructura científica submarina multidisciplinar
permanente que registra diferentes datos, tanto oceanográficos, incluyendo la observación del medio marino en mar profundo así
como los fenómenos de bioluminiscencia como geofísicos. También dispone de un sismógrafo que registra los temblores del planeta. Este
telescopio tiene como objetivo la observación de fenómenos cósmicos de alta energía, pero también puede observar neutrinos de energía
más baja procedentes de la acumulación de materia oscura en el centro de la Tierra, del Sol o de otra galaxia. Antares ya está
construido y se encuentra en fase de explotación científica.
2.5.2 Otros Telescopios de neutrinos.
En la actualidad existen otros proyectos de telescopios de neutrinos que se basan en los mismos fundamentos que ANTARES para
detectar neutrinos de alta energía. Se trata de experimentos similares que aprovechan las ventajas que ofrecen otras
localizaciones geográficas para su construcción. Esta es una breve
descripción de ellos.
DUMAND: Fue el proyecto pionero aunque en la actualidad ha sido
sustituido por AMANDA. Se trataba de un telescopio submarino, en ciertos aspectos similares a ANTARES, que estaba situado en las
islas Hawái. AMANDA: Es un proyecto en funcionamiento instalado en el polo
sur. En la actualidad ya hay varias líneas desplegadas. Las cuatro primeras lo fueron en 1993-1994 a una profundidad de mil metros
bajo el hielo (AMANDA-A). Más tarde han sido desplegadas nuevas líneas a una profundidad entre mil quinientos y dos mil metros
(AMANDA-B). Comparado con el agua del mar, el hielo es un ambiente más limpio que no presenta bioluminiscencia. Sin
embargo, presenta longitudes de difusión más pequeñas lo que dificulta la transmisión de la luz y empeora la resolución angular.
BAIKAL: Se trata de un proyecto instalado en el lago Baikal, en
Siberia, a una profundidad de mil metros. Este experimento aprovecha la superficie helada del lago para la inmersión y
recuperación de líneas con fotomultiplicadores. En abril de 1993 se sumergieron treinta y seis fotomultiplicadores que fueron
recuperados casi un año después. En la actualidad un número mayor de fotomultiplicadores se encuentra ya sumergido.
ICECUBE: Se trata de una gigantesca instalación de más de un kilómetro cúbico enterrada a mil cuatrocientos metros de
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-12
profundidad bajo el hielo antártico, dimensiones similares a
KM3NeT, con una superficie de un Kilómetro cubico. NEMO: El proyecto NEMO pretende instalar a unos tres mil
quinientos metros de profundidad en el mar, a veinte y ocho kilómetros de la costa de Sicilia, un cubo de dos kilómetros de lado
formado por una red de fotodetectores (fotomultiplicadores) para observar la radiación de Cherenkov que se produce cuando un
neutrino de alta energía colisiona con una molécula de agua.
NESTOR: Es un proyecto que se planea instalar a una profundidad
de tres mil ochocientos metros cerca de la costa de Pylos en el
mar Egeo. El proyecto consiste en una torre de doce pisos hexagonales de dieciséis metros de diámetro que soportan un total
de ciento sesenta y ocho fotomultiplicadores.
2.6. El Telescopio KM3NeT.
EL telescopio de neutrinos KM3NeT es una infraestructura de investigación submarina europea ubicada en el fondo del Mar
Mediterráneo, aproximadamente a unos tres mil metros, en el que se albergará un telescopio de neutrinos con un volumen de al menos un
kilómetro cúbico. Dicho telescopio permitirá detectar neutrinos cósmicos procedentes de fuentes astrofísicas tales como las
explosiones de rayos gamma, los núcleos activos galácticos, restos de supernovas, etc. Será, por tanto, un poderosísimo instrumento en la
búsqueda de materia oscura en el Universo. El telescopio de neutrinos submarinos KM3NeT constituirá también una plataforma
marina donde podrán ubicarse instrumentos para realizar estudios y
medidas continuas y a largo plazo del medio ambiente marino.
Para el diseño del proyecto KM3NeT cuenta con la experiencia de tres
proyectos pilotos en el mar mediterráneo, como son el proyecto Antares, el proyecto griego Néstor, y el proyecto Nemo.
Como idea global es necesario entender que el telescopio de neutrinos KM3NeT consistirá en un array(14) de detectores ópticos,
fotomultiplicadores (PMT) sensibles a los conos de luz Cherenkov, y protegidos por esferas de vidrio diseñadas para resistir las altas
presiones del fondo marino.
En una primera fase del proyecto KM3NeT, únicamente se va a
instalar una única línea de detección o DU “Detection Unit”, de las ciento cincuenta que tendrá el telescopio cuando esté terminado,
todo esto se hace con el fin de realizar un último test en el lugar y en las condiciones ambientales en las que se va a construir, antes de
empezar a fabricar en masa todos los componentes necesarios para
construir un telescopio de estas características, con el fin de comprobar que todos los dispositivos funcionan correctamente. Al
proceso de diseño y fabricación de esta línea de detección que servirá
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-13
como modelo para la fabricación en serie de las líneas restantes, se le
ha llamado Pre-Production Model “PPM”. Esta línea de detección estará completa y contara con toda la electrónica necesaria para
poder empezar a detectar neutrinos, se espera que esta línea este operativa y tomando datos a finales de este año.
[7] Fig. 13. Distribución de líneas KM3NeT.
2.6.1. Estructura del Telescopio KM3NeT.
Cada línea o DU “Detection Unit” del telescopio KM3NeT estará
formada de un material que no será rígido, sino ligeramente flexible para evitar rupturas debido a las tensiones y sobresfuerzos
mecánicos durante la inmersión, tendrá una longitud de mil metros, con una boya en su parte superior y un peso muerto o ancla en su
parte inferior, la parte activa de la línea comenzará unos cien metros
por encima del fondo del mar para evitar el fango y la suciedad del fondo que pueden ser removidos por las corrientes como sucede en el
telescopio de neutrinos Antares.
El telescopio KM3Net estará formado por ciento cincuenta líneas o DU
“Detection Unit”, cada línea estará formada por veinte pisos, con una separación entre los pisos de cuarenta metros, y con una separación
de cien metros con las otras líneas del telescopio, cada piso tendrá una longitud de seis metros y se instalarán dos esferas de vidrio o
DOM “Digital Optical Module” en los extremos. En la figura 14 podemos ver la composición y medidas en centímetros de un piso de
una de las líneas del telescopio submarino de neutrinos KM3NeT.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-14
[7] Fig. 14. Composición y medidas de un piso del Telescopio KM3NeT.
La estructura del peso muerto o ancla que se instalará en la parte
inferior de cada línea estará compuesta por acero bajo en carbono
(S235JREN 10027-1) (1.0037 EN 10027-2). La estructura y medidas
en centímetros lo podemos ver en la figura 15.
[7] Fig. 15. Estructura y medidas del ancla del telescopio KM3NeT.
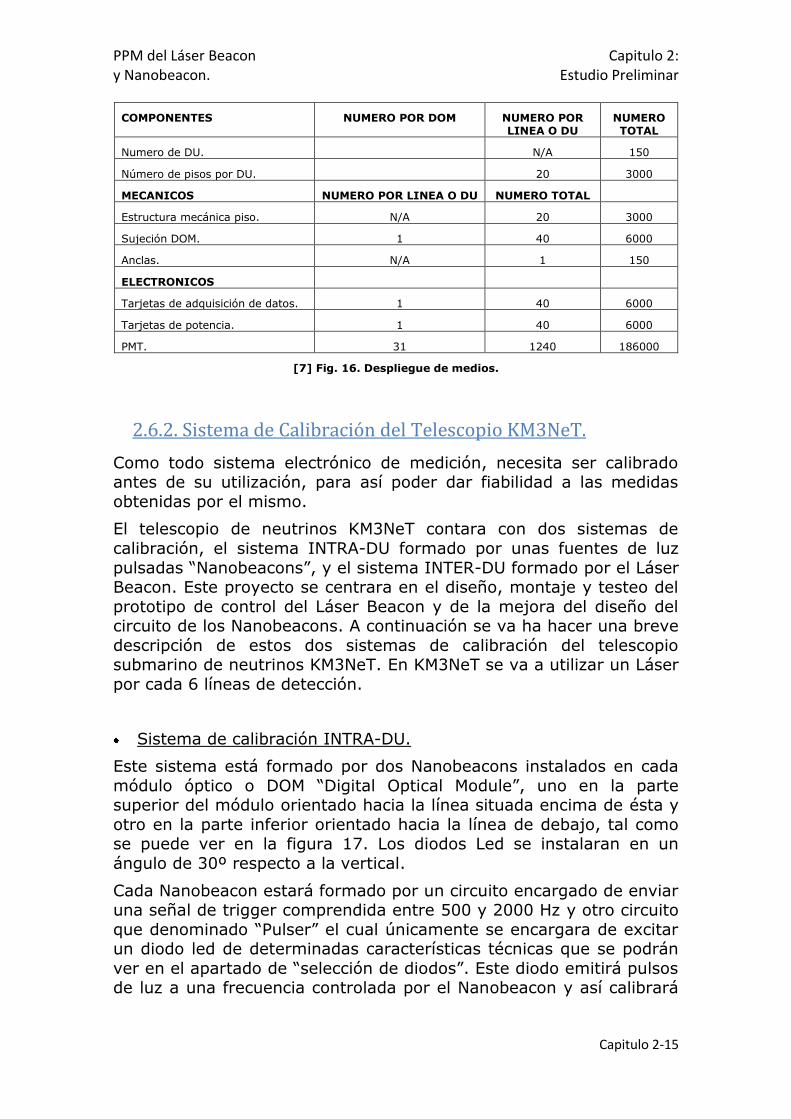
Con el fin de entender un poco más el gran despliegue de medios que
se ha de hacer para poder llevar a cabo un proyecto de estas
características, se va mostrar en la siguiente tabla algunas de las
cantidades de componentes necesarios para la construcción del
telescopio de neutrinos KM3NeT.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-15
COMPONENTES NUMERO POR DOM NUMERO POR LINEA O DU
NUMERO TOTAL
Numero de DU. N/A 150
Número de pisos por DU. 20 3000
MECANICOS NUMERO POR LINEA O DU NUMERO TOTAL
Estructura mecánica piso. N/A 20 3000
Sujeción DOM. 1 40 6000
Anclas. N/A 1 150
ELECTRONICOS
Tarjetas de adquisición de datos. 1 40 6000
Tarjetas de potencia. 1 40 6000
PMT. 31 1240 186000
[7] Fig. 16. Despliegue de medios.
2.6.2. Sistema de Calibración del Telescopio KM3NeT.
Como todo sistema electrónico de medición, necesita ser calibrado antes de su utilización, para así poder dar fiabilidad a las medidas
obtenidas por el mismo.
El telescopio de neutrinos KM3NeT contara con dos sistemas de
calibración, el sistema INTRA-DU formado por unas fuentes de luz
pulsadas “Nanobeacons”, y el sistema INTER-DU formado por el Láser Beacon. Este proyecto se centrara en el diseño, montaje y testeo del
prototipo de control del Láser Beacon y de la mejora del diseño del circuito de los Nanobeacons. A continuación se va ha hacer una breve
descripción de estos dos sistemas de calibración del telescopio submarino de neutrinos KM3NeT. En KM3NeT se va a utilizar un Láser
por cada 6 líneas de detección.
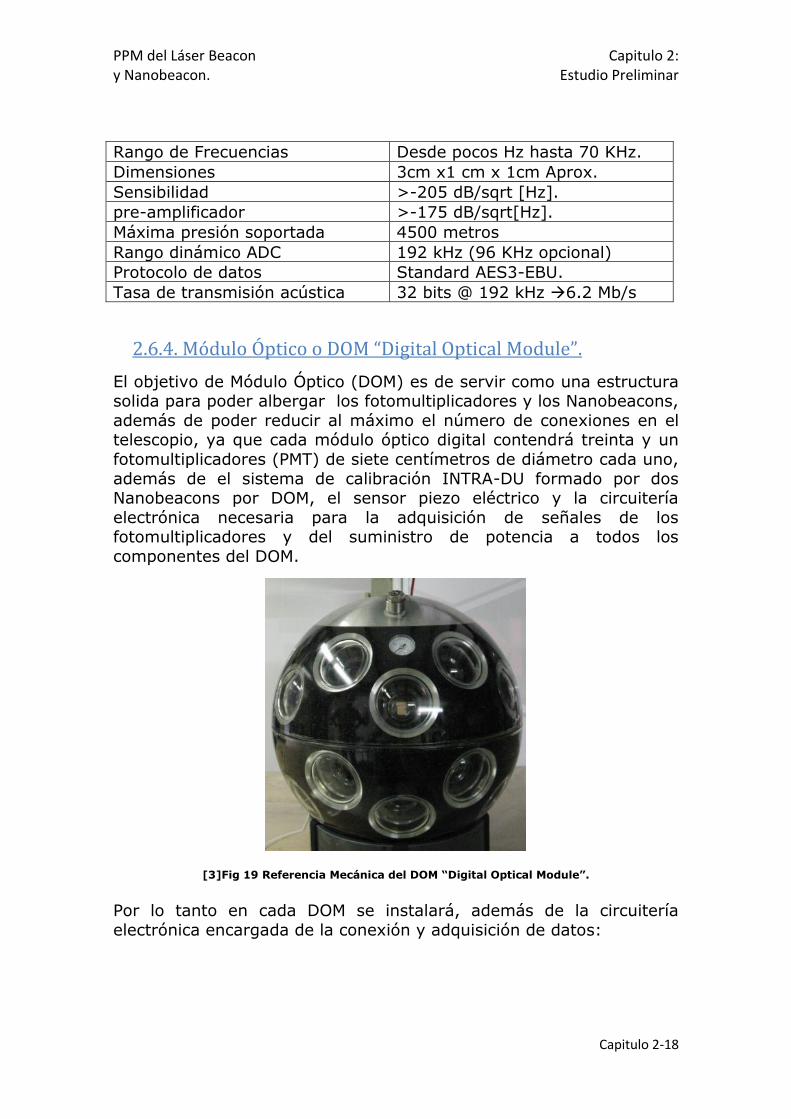
Sistema de calibración INTRA-DU.
Este sistema está formado por dos Nanobeacons instalados en cada
módulo óptico o DOM “Digital Optical Module”, uno en la parte superior del módulo orientado hacia la línea situada encima de ésta y
otro en la parte inferior orientado hacia la línea de debajo, tal como se puede ver en la figura 17. Los diodos Led se instalaran en un
ángulo de 30º respecto a la vertical.
Cada Nanobeacon estará formado por un circuito encargado de enviar una señal de trigger comprendida entre 500 y 2000 Hz y otro circuito
que denominado “Pulser” el cual únicamente se encargara de excitar un diodo led de determinadas características técnicas que se podrán
ver en el apartado de “selección de diodos”. Este diodo emitirá pulsos de luz a una frecuencia controlada por el Nanobeacon y así calibrará
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-16
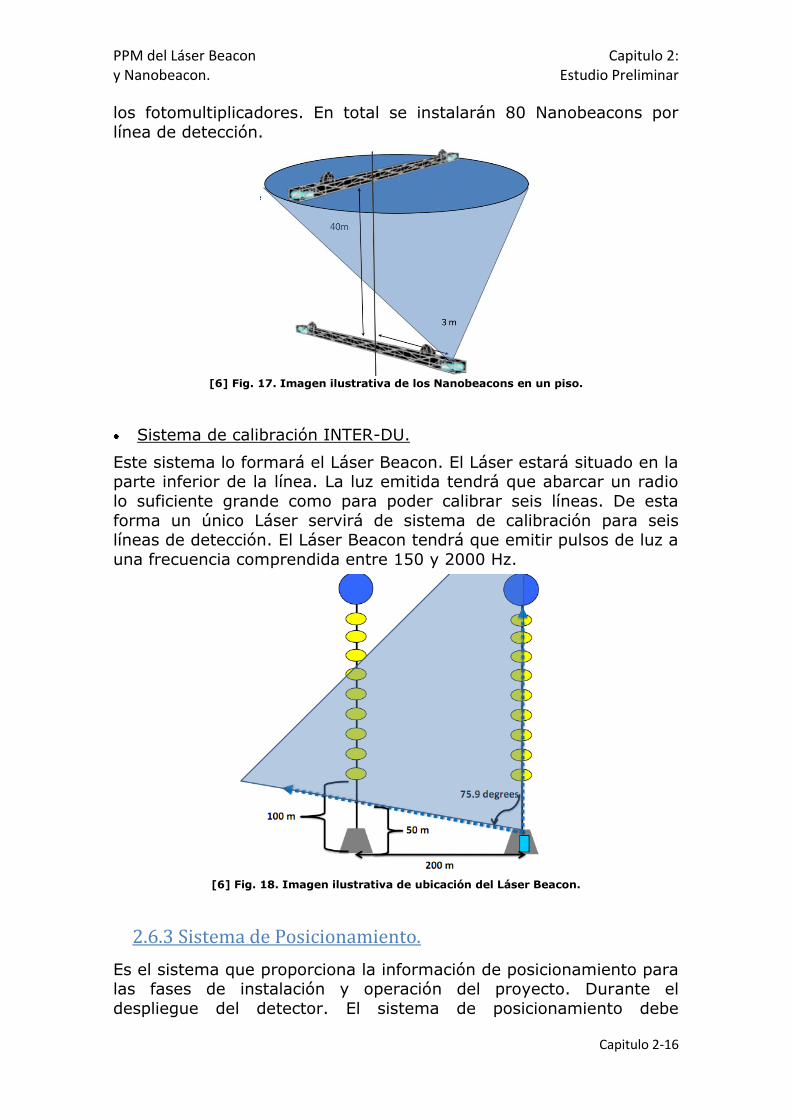
los fotomultiplicadores. En total se instalarán 80 Nanobeacons por
línea de detección.
[6] Fig. 17. Imagen ilustrativa de los Nanobeacons en un piso.
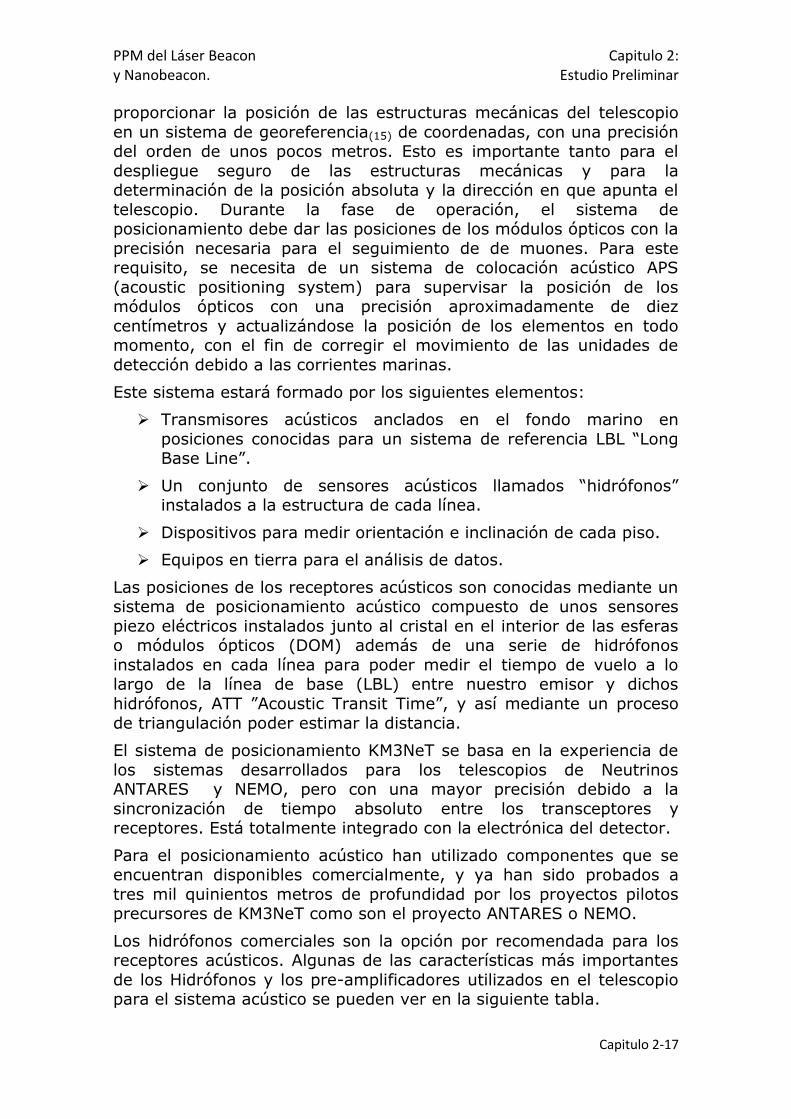
Sistema de calibración INTER-DU.
Este sistema lo formará el Láser Beacon. El Láser estará situado en la parte inferior de la línea. La luz emitida tendrá que abarcar un radio
lo suficiente grande como para poder calibrar seis líneas. De esta
forma un único Láser servirá de sistema de calibración para seis líneas de detección. El Láser Beacon tendrá que emitir pulsos de luz a
una frecuencia comprendida entre 150 y 2000 Hz.
[6] Fig. 18. Imagen ilustrativa de ubicación del Láser Beacon.
2.6.3 Sistema de Posicionamiento.
Es el sistema que proporciona la información de posicionamiento para las fases de instalación y operación del proyecto. Durante el
despliegue del detector. El sistema de posicionamiento debe
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
Capitulo 2-17
proporcionar la posición de las estructuras mecánicas del telescopio
en un sistema de georeferencia(15) de coordenadas, con una precisión del orden de unos pocos metros. Esto es importante tanto para el
despliegue seguro de las estructuras mecánicas y para la determinación de la posición absoluta y la dirección en que apunta el
telescopio. Durante la fase de operación, el sistema de posicionamiento debe dar las posiciones de los módulos ópticos con la
precisión necesaria para el seguimiento de de muones. Para este requisito, se necesita de un sistema de colocación acústico APS
(acoustic positioning system) para supervisar la posición de los módulos ópticos con una precisión aproximadamente de diez
centímetros y actualizándose la posición de los elementos en todo momento, con el fin de corregir el movimiento de las unidades de
detección debido a las corrientes marinas.
Este sistema estará formado por los siguientes elementos:
Transmisores acústicos anclados en el fondo marino en
posiciones conocidas para un sistema de referencia LBL “Long Base Line”.
Un conjunto de sensores acústicos llamados “hidrófonos” instalados a la estructura de cada línea.
Dispositivos para medir orientación e inclinación de cada piso.
Equipos en tierra para el análisis de datos.
Las posiciones de los receptores acústicos son conocidas mediante un sistema de posicionamiento acústico compuesto de unos sensores
piezo eléctricos instalados junto al cristal en el interior de las esferas o módulos ópticos (DOM) además de una serie de hidrófonos
instalados en cada línea para poder medir el tiempo de vuelo a lo largo de la línea de base (LBL) entre nuestro emisor y dichos
hidrófonos, ATT ”Acoustic Transit Time”, y así mediante un proceso
de triangulación poder estimar la distancia.
El sistema de posicionamiento KM3NeT se basa en la experiencia de
los sistemas desarrollados para los telescopios de Neutrinos ANTARES y NEMO, pero con una mayor precisión debido a la
sincronización de tiempo absoluto entre los transceptores y receptores. Está totalmente integrado con la electrónica del detector.
Para el posicionamiento acústico han utilizado componentes que se encuentran disponibles comercialmente, y ya han sido probados a
tres mil quinientos metros de profundidad por los proyectos pilotos precursores de KM3NeT como son el proyecto ANTARES o NEMO.
Los hidrófonos comerciales son la opción por recomendada para los receptores acústicos. Algunas de las características más importantes
de los Hidrófonos y los pre-amplificadores utilizados en el telescopio para el sistema acústico se pueden ver en la siguiente tabla.
PPM del Láser Beacon Capitulo 2: y Nanobeacon. Estudio Preliminar
PPM del Láser Beacon Capitulo 3: y Nanobeacon. Requerimientos
Capitulo 3-17
Un problema que afecta a las baterías corrientes consiste en que, si
no se han descargado completamente, sólo podrán recargarse hasta un límite, la diferencia entre la energía que faltaba con cargar y la
que había antes de ponerse la batería nuevamente en carga. En la práctica, las baterías corrientes hay que descargarlas, las de ión litio
no. Su capacidad habitual suele ser de 1.5 a 2.8 Amperios, en pilas tipo AA, y su densidad de energía de 115 Wh/Kg.
Ventajas:
No hay efecto memoria y no requiere ciclos de mantenimientos para prolongar la vida de la batería.
Menor peso por unidad. Permiten llegar a altas densidades de capacidad.
No necesitan mantenimiento en todo su ciclo de vida.
Desventajas:
Las baterías de Li-Ion requieren un circuito de protección para
mantenerse operando de forma segura.
La carga debe realizarse bajo estrictos estándares.
Deterioro provocado por el paso del tiempo, aún cuando no haya sido usada
No admiten descargas completas.
Pueden sobrecalentarse hasta el punto de explotar.
Peor capacidad de trabajo en frío. Rendimiento inferior a bajas temperaturas, hasta en un 25 % menos que las Ni-Cd y Ni-MH.
3.5.6.2. Baterías de níquel-cadmio. Las baterías de níquel cadmio (que suelen abreviarse "Ni-Cd") son baterías recargables de uso doméstico e industrial. Se utilizan cada
vez menos, a favor de la Ni-MH, debido a su efecto memoria y al cadmio, que es muy contaminante. Estas baterías tienen una mayor
durabilidad (ciclos carga) que las baterías de NI-MH. Las baterías de níquel-cadmio utilizan un cátodo de hidróxido de
níquel y un ánodo de un compuesto de cadmio. El electrolito es de hidróxido de potasio. Esta configuración de materiales permite
recargar la batería una vez está agotada, para su reutilización. Sin embargo, su densidad de energía es de tan sólo cincuenta Wh/kg, lo
que hace que tengan poca capacidad. Admiten sobrecargas, se pueden seguir cargando cuando ya no admiten más carga, aunque no
la almacena. Admiten un gran rango de temperaturas de funcionamiento.
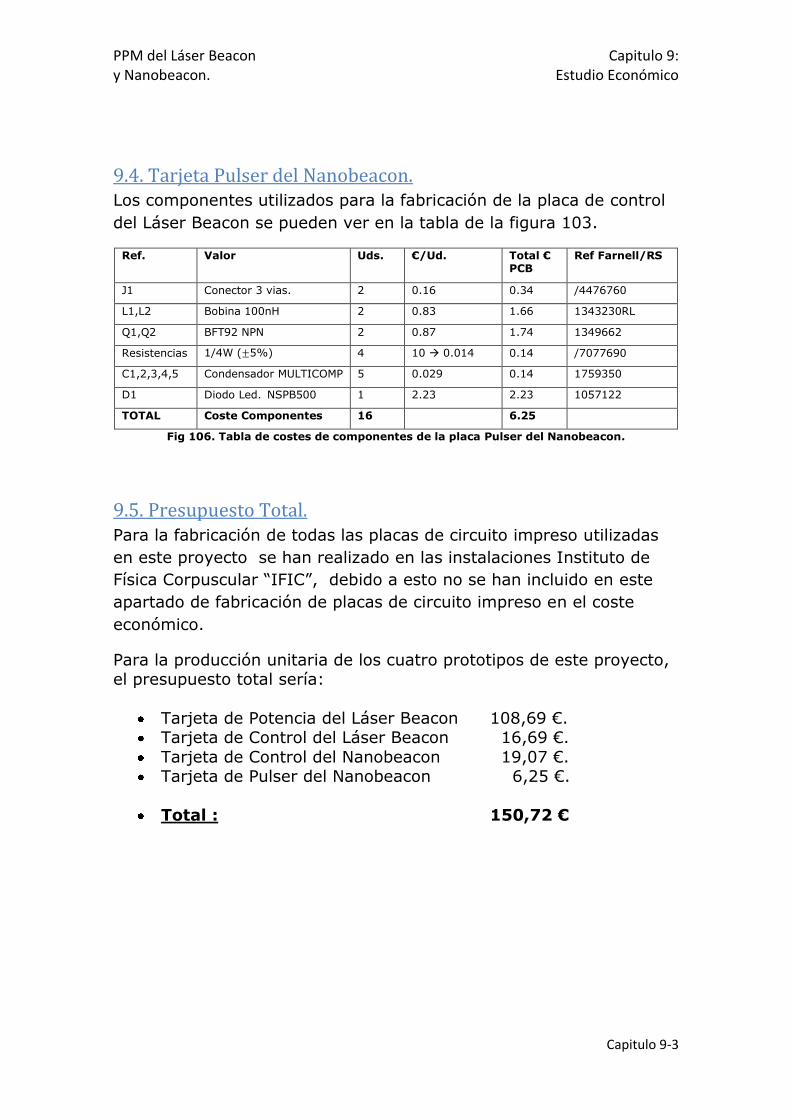
Fig 106. Tabla de costes de componentes de la placa Pulser del Nanobeacon.
9.5. Presupuesto Total. Para la fabricación de todas las placas de circuito impreso utilizadas
en este proyecto se han realizado en las instalaciones Instituto de
Física Corpuscular “IFIC”, debido a esto no se han incluido en este
apartado de fabricación de placas de circuito impreso en el coste
económico.
Para la producción unitaria de los cuatro prototipos de este proyecto, el presupuesto total sería:
Tarjeta de Potencia del Láser Beacon 108,69 €. Tarjeta de Control del Láser Beacon 16,69 €.
Tarjeta de Control del Nanobeacon 19,07 €. Tarjeta de Pulser del Nanobeacon 6,25 €.
Total : 150,72 €
Capitulo 10-1
En este capítulo se trataran las conclusiones alcanzadas tras la
realización del presente proyecto, las dificultades encontradas y los conocimientos adquiridos durante el desarrollo del mismo, así como
las posibles mejoras que se pueden realizar en un futuro. os.
10.1. Conclusiones. Los objetivos planteados al principio del proyecto eran:
Desarrollar y diseñar los prototipos de control del Láser Beacon y
mejorar el diseño del Nanobeacon. El prototipo de control del Láser Beacon tenía que cumplir las siguientes características:
Proporcionar alimentación y señales de control al Láser Beacon. Proporcionar una señal trigger de niveles TTL con un rango de
frecuencias comprendido entre 150 y 2000 Hz. Seleccionar entre una señal de trigger interna (generada por el
mismo), o externa que se nos proporcionara del exterior. Control sobre el Láser Beacon mediante comunicación RS232.
Suministrar una alimentación y las señales de control sobre el atenuador óptico(Polarizador).
Implementar mediante software Labview un panel de control Virtual capaz de controlar y testear el hardware del láser
Beacon.
El prototipo para el sistema de Nanobeacon tenía que cumplir:
Seleccionar entre una señal de trigger interna (generada por el
mismo), o externa que se nos proporcionara del exterior. Control sobre el Nanobeacon mediante comunicación I2C.
Seleccionar entre una señal de trigger interna (generada por el mismo), o externa que se nos proporcionara del exterior.
Proporcionar alimentación y señales de control al Led Beacon.
Proporcionar una señal trigger de niveles TTL con un rango de frecuencias comprendido entre 500 y 2000 Hz.
Por lo que llegamos a la conclusión de que se han cumplido con todos los objetivos planteados inicialmente en este proyecto.
PPM del Láser Beacon Capitulo 10: y Nanobeacon. Conclusiones
Capitulo 10-2
10.2. Aprendizaje.
Este proyecto me ha servido para adquirir conocimientos sobre:
Programación en lenguaje de alto nivel de microcontroladores,
en este caso el lenguaje C. Muy común en la programación digital de casi cualquier sistema electrónico.
Utilización de software especifico para la simulación de programación de alto nivel, lenguaje C.
Conocimientos en convertidores dc/dc y limitadores de corriente, así como en fuentes de alimentación conmutadas.
Diseño de placas de circuito impreso mediante el software de diseño electrónico Orcad.
Conocimientos en protocolos de comunicación serie, como RS232, I2C.
Estructura, características y tipos de baterías comerciales.
En la elaboración de este proyecto se ha tenido que diseñar y ensamblar un prototipo como el del Láser Beacon partiendo desde
cero, teniendo que hacer el diseño de las placas. El aprendizaje en C de los microcontroladores y el manejo de los protocolos de
comunicación serie como el RS232 y I2C ha sido desde cero, puesto que inicialmente no tenía ningún tipo de experiencia previa sobre
ellos. Cierto es que para el prototipo del Nanobeacon se ha partido del diseño existen en el Proyecto Antares, este se ha mejorado
obteniendo así una configuración con mas precisión y que nos ofrece más posibilidades que la diseñada para el proyecto Antares.
10.3. Futuras Mejoras.
En un futuro, se podrá mejorar el sistema con las siguientes modificaciones:
Utilizar un potenciómetro digital controlador por I2C para poder
modificar la corriente de carga de las baterías. Incorporar un sensor de corriente a la entrada de las baterías y
del Láser que indique tanto la corriente de carga como el consumo del Láser.
Utilizar protocolo de comunicación RS485 más rápido, seguro y
permitiendo mayor distancia de transmisión que el utilizado RS232.
Capitulo 11-1
1. Leptones: En física, un leptón es una partícula con espín que no experimenta interacción fuerte. Los leptones forman parte de una
familia de partículas elementales conocida como la familia de los fermiones.
2. Quarks: Es una de las seis partículas que, según se cree son los
constituyentes básicos de las partículas elementales como el prontón, el neutrón o el pión. El concepto de quark fue propuesto
independientemente en 1963 por los físicos estadounidenses Murray Gell Mann y George Zweig. El termino quark se tomo de la obra
Finnegans Wake del escritor irlandés James Joyce. 3. Quasars: Un cuásar o quásar (acrónimo en inglés de quasi-stellar
radio source) es una fuente astronómica de energía electromagnética, que incluye radiofrecuencias y luz visible.
4. Megapársec: El pársec es una unidad de longitud utilizada en astronomía.
5. M.A.Markov : Cientifico ruso que en 1960 propuso usar un gran recipiente de agua para la observación astronómica de neutrinos.
6. Cherenkov: Radiación que produce un efecto óptico en forma de cono de luz al interaccionar los neutrinos con la corteza terrestre.
7. Isótopos: Se conoce como isótopos a los átomos de un mismo
elemento que posee distinto número electrones, es decir, distinto número de atómico que de número másico. 8. Fotomultiplicadores: Se llama fotomultiplicador a un tipo de detector óptico de vacío que aprovecha el efecto de emisión
secundaria de electrones para responder a niveles muy bajos de iluminación, manteniendo un nivel de ruido aceptable.
9. Fotocátodo: Un Fotocátodo es un dispositivo sensible a la luz formado por una capa de una sustancia metálica como el cesio, sodio
ó antimonio sobre una base de cuarzo o vidrio y que descarga electrones cuando se expone a cierto nivel de luminosidad.
10. Marinas: Velocidad del mar del lugar escogido es de 5 cm/s, la velocidad máxima medida es de 18 cm/s.
11. Benthos: Esfera de vidrio instalada en Antares que protege a cada fotomultiplicador y su electrónica de la presión. Además, el
campo magnético de la Tierra se apantalla mediante una malla de µ-
metal. 12. Convolución: Matemáticamente una convolución es un
operador matemático que transforma dos funciones f y g en una tercera función que en cierto sentido representa la magnitud en la
que se superponen f y una versión trasladada e invertida de g. Una convolución es un tipo muy general de promedio móvil.
PPM del Láser Beacon Capitulo 11: y Nanobeacon. Glosario de Términos
Capitulo 11-2
13. Transmisividad: La capacidad de un material de transmitir la
radiación incidente sobre él, es decir es la proporción de radiación que es capaz de atravesar dicho material. 14. Array: Termino usado para referirse a matrices de elementos. 15. Georeferencia: Se refiere al posicionamiento con el que se
define la localización de un objeto (representado en el plano espacial mediante punto, vector, área, volumen) en un sistema de
coordenadas y datum determinado. 16. Electrólito: Sustancia que, fundida o en disolución acuosa, se
disocia en iones, por lo cual es conductora de la electricidad 17. Oxidróxido: Los hidróxidos son un grupo de compuestos
químicos formados por un metal y uno o varios aniones hidroxilos, en lugar de oxígeno como sucede con los óxidos.
18. Dendritas: as dendritas son pequeños hilos metálicos que se
forman por la aglomeración de partículas de plomo de la placa negativa en una batería.
19. Fluctúe(Fluctuar): Experimentar algo una variación de valor o
medida. 20. Pseudocapacitancia: En la utilización de súper condensadores
es la deficiencia electrónica producto de la interacción de los iones metálicos con el medio de carbono. La pseudocapacitancia es un
fenómeno dependiente de la tensión, con lo que por lo tanto se posee una capacitancia variable que debe ser controlada adecuadamente. 21. Polímeros: Se denomina polímeros a la unión que producen de cientos de miles de moléculas pequeñas denominadas monómeros
que forman enormes cadenas.
22. Jitter: Se denomina Jitter a la variabilidad temporal durante el envío de señales digitales. Es un cambio indeseado y abrupto de la
propiedad de una señal. Esto puede afectar tanto a la amplitud como a la frecuencia y la situación de fase. El jitter es la primera
consecuencia de un retraso de la señal. 23. Slew-rate: Es una efecto no lineal de los amplificadores. Se
puede definir como la velocidad de respuesta del amplificador ante variaciones de la tensión de entrada. Representa la incapacidad de un
amplificador para seguir variaciones rápidas de la señal de entrada. 24. Dieléctrico: Material que no conduce la electricidad por lo que
puede ser utilizado como aislante eléctricos. 25. Relés: El relé o relevador es un dispositivo electromecánico.
Funciona como un interruptor controlado por un circuito eléctrico en el que, por medio de una bobina y un electroimán, se acciona un
juego de uno o varios contactos que permiten abrir o cerrar otros