
THE LOW FREQUENCY MOTIONS OF A SEMI-SUBMERSIBLE I N WAVES
J . A . P i n k s t e r and R.H.M. Huijsmans Netherlands Ship Model Basin, The Netherlands
SUMMARY
I n t h i s paper a t t e n t i o n i s pa id t o low frequency wave d r i f t f o r c e s on a semi-submersible moored i n i r r e g u l a r head waves and t o t h e low frequency h o r i z o n t a l motions caused by t h e d r i f t fo rces .
The wave d r i f t f o r c e s a r e computed based on three-dimensional p o t e n t i a l theory using t h e d i r e c t i n t e g r a t i o n method. Time records of t h e low frequency d r i f t f o r c e i n i r r e g u l a r waves a r e computed using t h e second o rder impulse response funct ion technique. Resul ts of t h i s method a r e compared with r e s u l t s of t h e d i r e c t summation method. The comparison shows t h a t use of t h e sec- ond o rder impulse response funct ion l e a d s t o numerically accura te r e s u l t s . A computed low f r e - quency d r i f t f o r c e record is compared with a measured d r i f t f o r c e record. The comparison shows t h a t the p r e d i c t i o n s a r e q u a l i t a t i v e l y c o r r e c t bu t some 30 t o 40 pe r cen t lower than measured da ta . Resu l t s of time domain s imula t ion computations of the low frequency surge motions i n ir- r e g u l a r head s e a s a r e compared with measurements. A d i scuss ion i s given regarding d i f f e r e n c e s between computations and measurements.
NOMENCLATURE
all = added mass i n surge
b l l = l i n e a r damping c o e f f i c i e n t i n surge
b2 = q u a d r a t i c damping c o e f f i c i e n t
C = r e s t o r i n g c o e f f i c i e n t of t h e mooring system
dL = l eng th element of the w a t e r l i n e
dS = sur face element of S o r So - F = fo rce vec to r wi th components F,, F2 and F3
~ ( 2 ) = second o rder f o r c e vec to r wi th components F : ~ ) l F:~) and F$*)
g ( 2 ) (t,, t2) = q u a d r a t i c impulse response func t ion
M = mass mat r ix
m = mass of the v e s s e l i n a i r - N = outward po in t ing normal u n i t vec to r of a su r face elernent dS r e l a t i v e t o a r i g h t -
handed system of co-ordinates wi th o r i g i n i n t h e c e n t r e of g r a v i t y and Xj-axis, v e r t i c a l l y upwards
= outward po in t ing normal u n i t vec to r of a su r face element dS referenced t o t h e body axes wi th components n n2 and n3
n, ( a ) = d i r e c t i o n cosine of a l eng th element dL i n l o n g i t u d i n a l d i r e c t i o n
'ij = in-phase p a r t of the q u a d r a t i c t r a n s f e r funct ion
P = pressure ob ta inab le from B e r n o u l l i ' s equation
Qi j = quadrature p a r t of t h e q u a d r a t i c t r a n s f e r func t ion
S = ins tantaneous wetted s u r f a c e
S 0 = mean wetted su r face
T. 1 j
= amplitude of the q u a d r a t i c t r a n s f e r funct ion
t = time
5' t2 = time s h i f t s
%(l) = f i r s t o rder motion of a s u r f a c e element dS - Xg
= motion vec to r of t h e c e n t r e of g r a v i t y wi th components X lg l X2g and X 3g
~ ( 1 ) g
= f i r s t o rder o s c i l l a t o r y component of t h e motions of t h e c e n t r e of g r a v i t y
;(l) = f ' r t order angular motion vec to r wi th components xi1) ( r o l l ) , xi1) ( p i t c h ) and xa l f (yawl
E i = random phase uniformly d i s t r i b u t e d over 0 - 2n
E ( L ) = phase angle of t h e r e l a t i v e wave e l e v a t i o n a t p o i n t II r e l a t e d t o t h e undis turbed i wave c r e s t pass ing t h e c e n t r e of g r a v i t y
(1) 5 i = amplitude of t h e i - t h r e g u l a r wave component
<(l) (t) = time dependent wave e l e v a t i o n
(l) ' ( L ) = t r a n s f e r funct ion of t h e amplitude of t h e f i r s t o rder r e l a t i v e wave e l e v a t i o n a t =ri p o i n t L i n t h e wa te r l ine
(t,!t) = time dependent r e l a t i v e wave e l e v a t i o n i n a p o i n t L a long t h e wa te r l ine
o( l ) = f i r s t o rder v e l o c i t y p o t e n t i a l inc lud ing con t r ibu t ions from t h e incoming waves, d i f f r a c t i o n and body motions
= second o rder d i f f r a c t i o n p o t e n t i a l
= second order "undisturbed wave" p o t e n t i a l
W . = frequency of i - t h component
INTRODUCTION
I n o f f shore a c t i v i t i e s t h e types of work f o r which semi-submersibles a r e employed, a r e continuously inc reas ing . I n i t i a l l y t h e s e v e s s e l s were used a s s t a b l e pla t forms from which d r i l - l i n g a c t i v i t i e s were c a r r i e d ou t . Due t o t h e c o n s i s t e n t l y super io r seakeeping performance of t h e s e v e s s e l s compared with barges and s h i p s , such v e s s e l s a r e now a l s o being used f o r a v a r i e t y of o t h e r t a s k s such as product ion pla t forms, h o t e l p la t forms, mul t i - funct ional s e r v i c e v e s s e l s and crane vesse l s . The e a r l y semi-submersibles cons i s t ed of r e l a t i v e l y s l e n d e r elements. This was i n keeping with t h e b a s i c idea behind t h e design of such v e s s e l s which s t r o v e towards a f l o a t i n g s t r u c t u r e which was " t ransparen t" f o r the waves and which gained most of i ts buoyancy from submerged f l o a t e r s ou t of reach of t h e g r e a t e s t wave motion. Such design phi losophies l e d t o semi-submersibles which, although i n many cases possessed e x c e l l e n t motion c h a r a c t e r i s t i c s i n waves, were l i m i t e d i n t h e i r c a p a b i l i t y t o accept l a r g e v a r i a t i o n s i n deck load. This was i n p a r t due t o the r e l a t i v e l y s l ender columns and correspondingly smal l waterplane a r e a s of such v e s s e l s .
With the development of t h e o r e t i c a l means, such a s given by Hooft [ l ] , t o analyse t h e complex hydrodynamic aspec t s of semi-submersibles it became apparent t h a t wave t ransparency i s a design requirement which i s t o o simple and unnecessar i ly r e s t r i c t i v e f o r designing such ves- s e l s from t h e p o i n t of view of sea k ind l iness . It appeared t h a t wave loads on such v e s s e l s could be inf luenced and t h e corresponding motion could be optimised, f o r i n s t a n c e , by a l t e r a t i o n i n geometry. Thus, more recen t semi-submersible designs have become considerably l e s s s l ender and l e s s wave t ransparen t than t h e i r predecessors , whi le r e t a i n i n g t h e favourable motion charac te r - i s t i c s i n waves.
The use of l a r g e r diameter columns and t h e inc rease i n displacement, however, a l s o r e s u l t i n a p o t e n t i a l l y g r e a t e r c a p a b i l i t y of t h e s t r u c t u r e t o d i s t u r b and r e f l e c t t h e incoming waves. This may have a s i g n i f i c a n t e f f e c t on t h e low frequency second o rder wave f o r c e s on t h e s t r u c - t u r e . These f o r c e s , a l s o known a s low frequency wave d r i f t f o r c e s , a r e a s s o c i a t e d with t h e capa- b i l i t i e s of a s t r u c t u r e t o r e f l e c t waves and can generate l a r g e amplitude low frequency motions i n moored v e s s e l s r e s u l t i n g i n high peak mooring loads . I n t h e case of dynamically pos i t ioned v e s s e l s , these f o r c e s a r e of importance from the p o i n t of view of s t a t i o n keeping accuracy and t h r u s t e r s i z ing .
I n o rder t o i n v e s t i g a t e t h e m e r i t s of a p a r t i c u l a r design f o r a semi-submersible from t h e p o i n t of view of wave d r i f t fo rces and t h e r e s u l t a n t motion, a theory which embodies a l l r e l e v a n t a spec t s and which can be used a s a b a s i s f o r computation, i s needed. I n t h e p a s t , a number of t h e o r i e s have been pu t forward by means of which t h e wave d r i f t f o r c e s on a semi- submersible could be computed. See f o r ins tance Wahab 1 2 1 , P i j f e r s and Brink [31, F e r r e t t i and Ber ta E41 and Karppinen [5] . The l a s t of t h e s e au thors presented a computational method which is based on p o t e n t i a l theory and t h e assumption t h a t t h e elements of a semi-submersible such a s t h e columns and f l o a t e r s a r e s l e n d e r and from a hydrodynamic p o i n t of view, do n o t i n t e r a c t . The t o t a l second order wave d r i f t f o r c e i s then t h e sum of t h e d r i f t f o r c e s on t h e elements i n t h e absence of a l l o t h e r elements. According t o p o t e n t i a l theory which d i s r e g a r d s viscous e f f e c t , t h e d r i f t f o r c e s a r e a q u a d r a t i c func t ion of t h e wave he igh t . Wahab [ 2 1 , P i j f e r s and Brink 131 and F e r r e t t i and Ber ta [4 ] a l s o make use of t h e assumption of s l enderness and t h e absence of hydrodynamic i n t e r a c t i o n of t h e elements of the semi-submersible. The hydrodynamic f o r c e i n each element i s determined through t h e use of Morison's equat ion and t h e r e l a t i v e v e l o c i t y between t h e f l u i d and t h e elements. The t o t a l fosce i s found by summation over t h e elements. The d r i f t f o r c e i s def ined a s t h e mean value of t h e t o t a l f o r c e averaged over a wave per iod. Resul ts of c a l c u l a t i o n i n d i c a t e t h a t v iscous e f f e c t s a r i s i n g from t h e d rag term i n Morison's equat ion a r e of s i g n i f i c a n t importance and t h a t t h e d r i f t f o r c e s a r e p ropor t iona l t o about t h e t h i r d power of t h e wave height . I n none of these cases a r e r e s u l t s of computation compared with experimental r e s u l t s , however, s o t h e i s s u e a s t o whether t h e wave d r i f t f o r c e s on semi-submersible s t r u c t u r e s a r e s i g n i f i c a n t l y inf luenced by viscous e f f e c t s o r t h a t t h e s e f o r c e s may be determined by methods which neg lec t hydrodynamic i n t e r a c t i o n between t h e elements of t h e cons t ruc t ion i s e s s e n t i a l l y l e f t u n s e t t l e d .
I n t h i s paper experimental r e s u l t s of model t e s t s wi th a semi-submersible i n i r r e g u l a r head waves w i l l be presented. The time domain record of the measured wave d r i f t f o r c e i n i r r e g - u l a r waves is compared with r e s u l t s of computation. The computations a r e based on three-dimen- s i o n a l p o t e n t i a l theory and t ake i n t o account t h e hydrodynamic i n t e r a c t i o n between t h e elements.

Resul ts of time domain s imulat ion of t h e low frequency surge motions i n i r r e g u l a r head waves a r e a l s o compared with experimental r e s u l t s . Before comparing t h e r e s u l t s of computations and exper- iments a b r i e f account w i l l be given of the method of computation employed f o r determinat ion of t h e wave d r i f t fo rces and the s imulat ion techniques used t o determine t h e low frequency compo- nen t s of t h e wave d r i f t fo rce and t h e h o r i z o n t a l surge motion of t h e semi-submersible.
WAVE DRIFT FORCES
Computations of wave d r i f t fo rces a r e based on t h e d i r e c t i n t e g r a t i o n method, see r e f . L 6 1 and [ 7 1 . By t h i s method t h e wave d r i f t fo rces a r e found from t h e second order term i n the following express ion f o r t h e hydrodynamic force:
Following t h e development given i n r e f . 161 we ob ta in t h e following express ion f o r t h e second o rder wave fo rce :
For t h e purpose of t ime domain s imulat ion of wave d r i f t fo rces equation (2) i s unsu i t ab le i n i ts p r e s e n t form. This i s due t o t h e l a r g e amount of d a t a which must be computed a t each t i m e s t e p i n o rder t o be ab le t o c a r r y ou t t h e i n t e g r a t i o n s around t h e wa te r l ine and over t h e h u l l su r face . It i s computationally more convenient t o use equat ion (2) t o compute frequency domain q u a d r a t i c frequency response o r t r a n s f e r func t ions , which i n t u r n can be transformed i n t o time domain second o rder impulse response funct ions . These second o rder impulse response func t ions , when convoluted with t h e undisturbed wave t r a i n , y i e l d time records of t h e second o rder d r i f t fo rces . See r e f . [ B ] . This procedure makes i t p o s s i b l e t o compute wave d r i f t fo rce r e c o ~ d s f o r a r b i t r a r y wave records i n a r e l a t i v e l y s t ra igh t fo rward and economic manner.
I n t h e following a b r i e f d e s c r i p t i o n i s given of the procedure t o ob ta in t h e q u a d r a t i c , t r a n s f e r funct ion f o r t h e second o rder wave d r i f t fo rces .
QUADRATIC TRIlNSFER FUNCTION
The t o t a l q u a d r a t i c t r a n s f e r func t ion i s s p l i t up i n con t r ibu t ions a r i s i n g from t h e fo l - lowing components of equat ion ( 2 ) :
I : F i r s t o rder r e l a t i v e wave e l e v a t i o n
I1 : Pressure drop due t o f i r s t order v e l o c i t y
- J J - t p l ~ o ( ' ) 12.;i.ds ( 4 )
0
111: Pressure due t o product of g r a d i e n t of f i r s t o r d e r p ressure and f i r s t o r d e r motion
I V : Contr ibut ion due t o products of f i r s t o rder angular motions and i n e r t i a f o r c e s
V : Contr ibut ion due t o second o r d e r p o t e n t i a l s
The procedure t o o b t a i n t h e q u a d r a t i c t r a n s f e r func t ions of t h e fo rces dependent on f i r s t o rder q u a n t i t i e s (I, 11, I11 and I V ) w i l l be i l l u s t r a t e d by t ak ing t h e low frequency p a r t of t h e lon- g i t u d i n a l component of t h e f o r c e con t r ibu t ion due t o t h e r e l a t i v e wave e leva t ion :
I n i r r e g u l a r long-cres ted waves t h e e l e v a t i o n , t o f i r s t o rder , of the incoming undisturbed waves - r e f e r r e d t o the mean p o s i t i o n of t h e c e n t r e of g r a v i t y of t h e f l o a t i n g body - may be w r i t t e n a s :
The f i r s t o rder r e l a t i v e wave e l e v a t i o n a t a p o i n t 9. on t h e wa te r l ine of t h e body may be w r i t - t e n a s follows:
S u b s t i t u t i o n of (10) i n equat ion ( 8 ) l eads t o :
+ high frequency terms (11)
where Pij and Q . a r e t h e in-phase and out-of-phase components of the time independent t r a n s - I l j l
£ e r func t ion with:
QijI = Q I ( w i 1 w j ) = - J f ~ 9 3 ' ( L ) . 5; ( L ) sin{^, ( L ) - ( L ) Inl ( L ) .dL (13) WL ri j i j
Taking the low frequency p a r t of t h e square of t h e wave e l e v a t i o n given by equat ion ( 9 ) r e s u l t s i n :
Comparison with equa t ion (11) shows t h a t P . and Qi j a r e t r a n s f e r func t ions which give t h a t 11, I
p a r t of t h e wave d r i f t i n g f o r c e which i s in-phase a n d - o u t - ~ f - ~ h a s e r e s p e c t i v e l y wi th t h e low frequency p a r t of t h e square of t h e i n c i d e n t wave e leva t ion .
It w i l l be c l e a r t h a t s i m i l a r developments can be made f o r o t h e r con t r ibu t ions t o t h e wave d r i f t i n g f o r c e s which depend only on f i r s t o rder q u a n t i t i e s . The con t r ibu t ion V due t o second o rder p o t e n t i a l s i s approximated using r e s u l t s of f i r s t o rder wave loads; see r e f . [7]. The t o t a l in-phase and out-of-phase t r a n s f e r func t ions a r e found by simple summation of t h e c o n t r i b u t i o n s from t h e f i v e components. The wave d r i f t i n g f o r c e s may t h u s be presented a s t r a n s - f e r func t ions which, a s can be seen from t h e aforegoing, a r e a funct ion of two frequencies . I n g e n e r a l , t h e q u a d r a t i c t r a n s f e r func t ions w i l l a l s o be func t ions of t h e d i r e c t i o n of t h e wave S.
Based on a wave e l e v a t i o n a s given by equat ion (9 ) t h e t o t a l wave d r i f t f o r c e i s found from:
i n which P . . and Q i j a r e found by summation of c o n t r i b u t i o n s I through V. 13
DRIFT FORCE I N A REGULAR WAVE GROUP
We consider t h e f i r s t o rder wave e l e v a t i o n i n a regu la r wave group c o n s i s t i n g of two reg- u l a r waves wi th frequency U . and w -
j-
= jl) .cos ( w l t + c l ) + <;l) .cos ( u 2 t + C 2 )
The second o rder f o r c e assoc ia ted with such a wave t r a i n has the following form:
From equat ion (17) it i s seen t h a t t h e second o rder f o r c e con ta ins two cons tan t compo- nents . Each of these components represen t s t h e cons tan t f o r c e which would be found i f t h e wave t r a i n cons i s t ed of a s i n g l e r e g u l a r wave with frequency w l o r w2 r e spec t ive ly . This shows t h a t , al though t h e f o r c e i s a non-linear phenomenon, t h e cons tan t o r mean second order f o r c e i n a wave t r a i n c o n s i s t i n g of a superpos i t ion of r egu la r waves i s t h e sum of t h e mean f o r c e s found f o r each of t h e component waves. The quadra t i c t r a n s f e r funct ion:
g ives t h e mean second o rder fo rce i n r e g u l a r waves wi th frequency wl : I n l i t e r a t u r e dea l ing with t h e mean second o rder fo rces on f l o a t i n g o b j e c t s i n r e g u l a r o r irregular waves t h i s i s o f t e n expressed a s a funct ion dependent on one frequency wl . The above equat ions show t h a t t h e t r a n s f e r func t ion f o r t h e mean o r constant p a r t i s , however, only a s p e c i f i c case of t h e gen- e r a l q u a d r a t i c t r a n s f e r funct ion P(wlrw2) f o r t h e f o r c e i n r e g u l a r wave groups.
Besides the cons tan t p a r t s t h e second o rder f o r c e con ta ins low frequency p a r t s wi th a frequency corresponding t o t h e d i f f e r e n c e frequency wl - w2 of t h e component r e g u l a r waves. It is seen t h a t t h e amplitudes of the in-phase and out-of-phase p a r t s depend on t h e sum of t h e in-phase q u a d r a t i c t r a n s f e r func t ions P12 and P21 and t h e d i f f e r e n c e of t h e out-of-phase func- t i o n s Q12 and Q21.
SYMMETRY OF THE QUADRATIC TRANSFER FUNCTIONS
From equat ion (1'7) it is seen t h a t t h e t r a n s f e r func t ions do not appear i n i s o l a t i o n but r a t h e r i n p a i r s . In genera l , t h e in-phase and out-of-phase components of t h e quadra t i c t r a n s f e r func t ions a s determined from equa t ions ( 3 ) through ( 7 ) f o r combinations of wl and w2 w i l l be s o t h a t , f o r ins tance :
However, s i n c e t h e f o r c e a s given i n equat ion (17) depends on the sum o r d i f f e r e n c e of t h e com- ponents of t h e q u a d r a t i c t r a n s f e r func t ions these may be s o reformulated t h a t t h e fol lowing symmetry r e l a t i o n s a r e v a l i d :
P(w1,w2) = P(w2'w1) (20)
Q ( w 1 , w 2 ) = - Q ( w 2 1 ~ 1 ) (21)
The in-phase component P(w1,w2) of t h e q u a d r a t i c t r a n s f e r funct ion of t h e t o t a l second o rder

fo rce t akes t h e form of a matr ix which i s symmetrical about t h e diagonal f o r which w l i s equa l t o w2 whi le t h e out-of-phase component Q ( w 1 , w 2 ) i s anti-symmetrical about the diagonal .
EVALUATION OF QUADRATIC TRANSFER FUNCTIONS
Evaluation of t h e va r ious components of t h e q u a d r a t i c t r a n s f e r funct ions of t h e low f r e - quency wave d r i f t i n g f o r c e s requ i res d e t a i l e d knowledge of t h e f i r s t o rder vesse l motions and f l u i d motions. For i n s t a n c e , a s shown by equat ions (12) and ( 1 3 ) , evaluat ion of con t r ibu t ion I r e q u i r e s knowledge of t h e r e l a t i v e wave e l e v a t i o n amplitudes and phase angles around t h e water- l i n e .
A numerical method by means of which such d e t a i l e d information may be obtained (us ing a d i s t r i b u t i o n of sources over t h e mean wetted su r face of t h e body) has been developed by Boreel 191 and Van Oortmerssen [10] .
TIME DOMAIN REPRESENTATION OF THE MEAN AND LOW FREQUENCY SECOND ORDER FORCES
According t o D a l z e l l [ 81 the low frequency second o rder fo rces can be computed given t h e q u a d r a t i c t r a n s f e r func t ion and the time record of t h e wave e leva t ion using the fol lowing r e l a - t i o n s h i p :
The q u a d r a t i c impulse response func t ion g ( 2 ) (t ,t ) i s der ived from t h e fol lowing express ion: 1 2
i n which:
G ( ~ ) ( w l , w 2 ) = complex q u a d r a t i c t r a n s f e r funct ion
From equat ion (22) it i s seen t h a t i f the q u a d r a t i c impulse response func t ion g ( 2 ) ( t lrt2) i s known the time record of t h e low frequency second o rder f o r c e s can be computed f o r a r b i t r a r y wave e l e v a t i o n records . The a p p l i c a b i l i t y of t h i s technique has been demonstrated ex tens ive ly and convincingly by D a l z e l l [ l11 using q u a d r a t i c t r a n s f e r func t ions f o r the second o rder f o r c e s obta ined from t e s t s i n i r r e g u l a r waves using c ross -b i - spec t ra l a n a l y s i s techniques.
Time records of second order wave d r i f t f o r c e s i n i r r e g u l a r waves can a l s o be generated based on equat ion (15) . I n such cases i t i s assumed t h a t t h e i r r e g u l a r waves a r e descr ibed by t h e s p e c t r a l dens i ty S ( U ) . The amplitudes ci a r e found from t h e following r e l a t i o n s h i p :
5
The phase angles gi a r e random with a homogeneous d i s t r i b u t i o n funct ion from zero t o 2n. The wave e l e v a t i o n follows from equat ion ( 9 ) . The wave d r i f t f o r c e record i s found from equa t ion (15) . It should be noted, however, t h a t i f t i m e records of d r i f t f o r c e s a r e generated f o r t h e purpose of s imulat ing t h e behaviour of moored v e s s e l s , t h e frequency d i f f e r e n c e s w i - w ' i n equat ion (15) must be chosen s u f f i c i e n t l y smal l i n o rder t o cover t h e frequency range 03 s ig - n i f i c a n t response of t h e moored v e s s e l with enough frequency bands. This w i l l genera l ly r e s u l t i n a l a r g e number, N I of d i s c r e t e f requencies w i being used t o desc r ibe t h e wave t r a i n of equa- t i o n ( 9 ) . This i n t u r n l e a d s t o a l a r g e number of summations t o be c a r r i e d ou t when genera t ing wave d r i f t f o r c e s according t o equation (15) .
Computational e f f o r t s involved with eva lua t ion of t h e wave d r i f t f o r c e record according t o equat ion (15) can be d r a s t i . c a l l y reduced by chosing e q u i d i s t a n t f requencies w i t o desc r ibe t h e wave spectrum. I f t h e frequency s t e p used t o desc r ibe t h e wave spectrum i s Aw then t h e wave record and hence t h e wave d r i f t f o r c e record become p e r i o d i c with a per iod o f :
According t o F o u r i e r ' s theorem t h e wave d r i f t f o r c e record can then be w r i t t e n i n t h e form of a s i n g l e summation a s follows:
where : wk = k. Aw
and from equat ion (15) Ak and Bk a r e found t o be:
wi th: 6k = 1 f o r k = 0
= 2 f o r k # O N = number of wave f requencies used t o desc r ibe t h e wave spectrum M = N - l
Use of equat ion (27) i n s t e a d of equat ion (15) involves computing the c o e f f i c i e n t s Ak and Bk according t o equat ions ( 2 9 ) , (30) and (25) us ing d a t a on t h e quadra t i c t r a n s f e r func t ions Pij and Qij. Once t h e s e c o e f f i c i e n t s a r e computed and s t o r e d t h e time record of t h e wave d r i f t f o r c e is computed from t h e s i n g l e summation of equat ion (27) .
I n t h i s paper time records of wave d r i f t f o r c e s on a semi-submersible i n i r r e g u l a r head waves a r e given, which have been computed using both t h e q u a d r a t i c impulse response func t ion technique and t h e d i r e c t summation technique of equa t ion (27) .
COMPUTATIONS OF LOW FREQUENCY MOTIONS
I n t h i s paper the low frequency wave d r i f t f o r c e induced surge motions of a semi-submers- i b l e i n head s e a s w i l l be presented. The equat ion of motion desc r ib ing t h e surge motion i s a s follows:
( m + al1)P1 + b j: + b P \P I + cx1 = ~ : ~ ) ( t ) 1 1 1 2 1 1 (31)
The added mass a l l was determined based on three-dimensional p o t e n t i a l theory computations. The damping c o e f f i c i e n t s b l l and b2 were obtained from st i l l water surge motion decay t e s t s i n t h e mooring system. The time record of t h e wave d r i f t f o r c e ~ 1 ~ ) ( t ) i s computed o f f - l i n e and s to red . A f t e r t h i s the equat ion of motion i s solved f o r t h e surge motion.
The aforementioned equat ion of motion i s r a t h e r simple. For more complex cases involving more degrees of freedom, and i n which t h e assumption of cons tan t added mass and damping i s n o t v a l i d anymore, a more s u i t a b l e s e t of equat ions of motion is chosen. See Van Oortmerssen 1101.
THE VESSEL
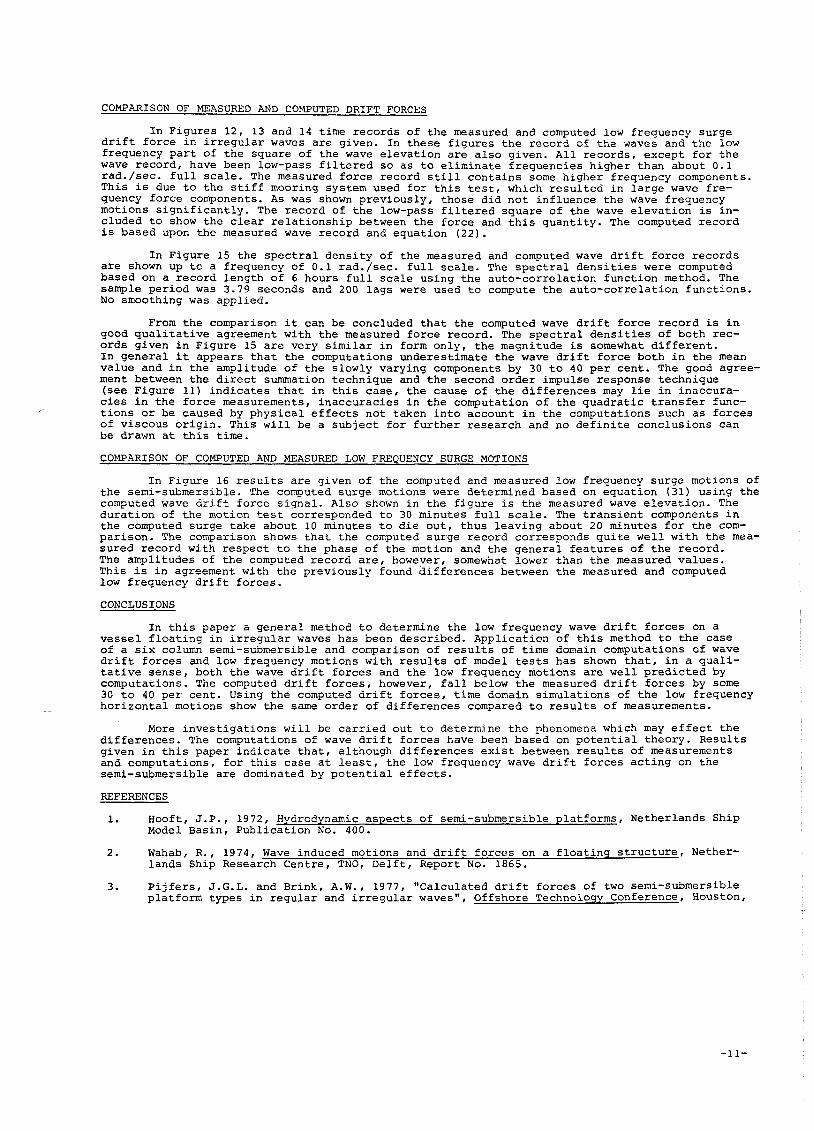
Computations and model t e s t s have been c a r r i e d o u t f o r a s i x column, two f l o a t e r semi- submersible. The main p a r t i c u l a r s a r e given i n Table I and Figure 1. The model was made of PVC t o a s c a l e of 1 t o 40.
For t h e computations us ing three-dimensional d i f f r a c t i o n theory, t h e wetted su r face of t h e h u l l is approximated using a t o t a l of 216 plane f a c e t elements. The wa te r l ine of t h e semi- submersible i s approximated using a t o t a l of 72 s t r a i g h t l i n e elements. The f a c e t schematisa- t i o n of one f l o a t e r and t h e w a t e r l i n e schemat isa t ion of one column a r e shown i n Figure 2.
Model t e s t s and computations were c a r r i e d o u t f o r a water depth corresponding t o 40 m f u l l s c a l e .
MODEL TESTS
Model t e s t s (and computations) have been c a r r i e d o u t f o r t h i s v e s s e l i n a v a r i e t y of cond i t ions . I n r e f . L71 r e s u l t s have been given on t e s t s i n r e g u l a r waves from ahead, abeam and from t h e bow q u a r t e r i n g d i r e c t i o n . I n t h e re fe rence mentioned, mean d r i f t f o r c e s i n regu- l a r waves and wave frequency motion response func t ions have been compared with r e s u l t s of com- pu ta t ions . The comparisons confirm t h a t , i n genera l , t h e wave frequency motions and mean d r i f t f o r c e s a r e accura te ly p r e d i c t e d by t h e computations. For f u r t h e r d e t a i l s we r e f e r t o t h e above mentioned re fe rence .
For t h i s paper a t t e n t i o n i s r e s t r i c t e d t o tests i n i r r e g u l a r head seas . Two t e s t s w i l l be discussed h e r e , v iz . : - One t e s t t o measure the time record of t h e surge wave d r i f t f o r c e (wave d r i f t fo rce t e s t ) .
- One t e s t t o measure t h e low frequency su rge motions wi th t h e v e s s e l moored i n a s o f t l i n e a r mooring sys tem (motion test) .
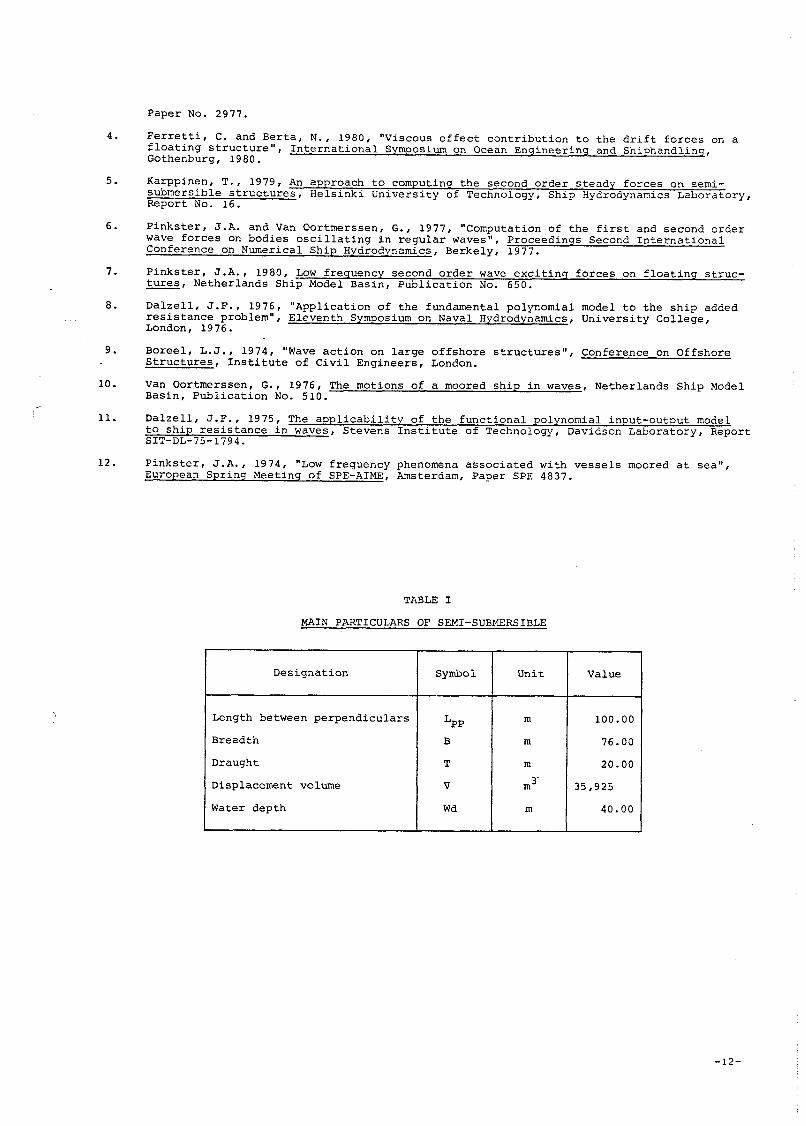
Besides t e s t s i n i r r e g u l a r head s e a s a su rge motion decay test was c a r r i e d ou t i n s t i l l wa te r w i th t h e v e s s e l moored i n t h e s o f t l i n e a r mooring system. I n F igu re 3 t h e wave spectrum i s shown o f t h e i r r e g u l a r waves f o r which model tests were c a r r i e d o u t .
TEST SET-UP FOR THE WAVE DRIFT FORCE TEST
The purpose o f t h i s t e s t was t o measure t h e wave d r i f t f o r c e s i n i r r e g u l a r waves i n such a way t h a t t h e r e s u l t s would be r e p r e s e n t a t i v e f o r t h e wave d r i f t f o r c e s a c t i n g on a s o f t moored semi-submersible. Th i s r e q u i r e d a t e s t se t -up which, on t h e one hand does n o t r e s t r i c t t h e wave f requency motions, and on t h e o t h e r hand r e s t r i c t s a s much a s p o s s i b l e low frequency su rge mo- t i o n s . The l a t t e r requi rement e n s u r e s t h a t t h e measured f o r c e s a r e n o t a f f e c t e d unduly by dynam- i c magn i f i ca t ion e f f e c t s .
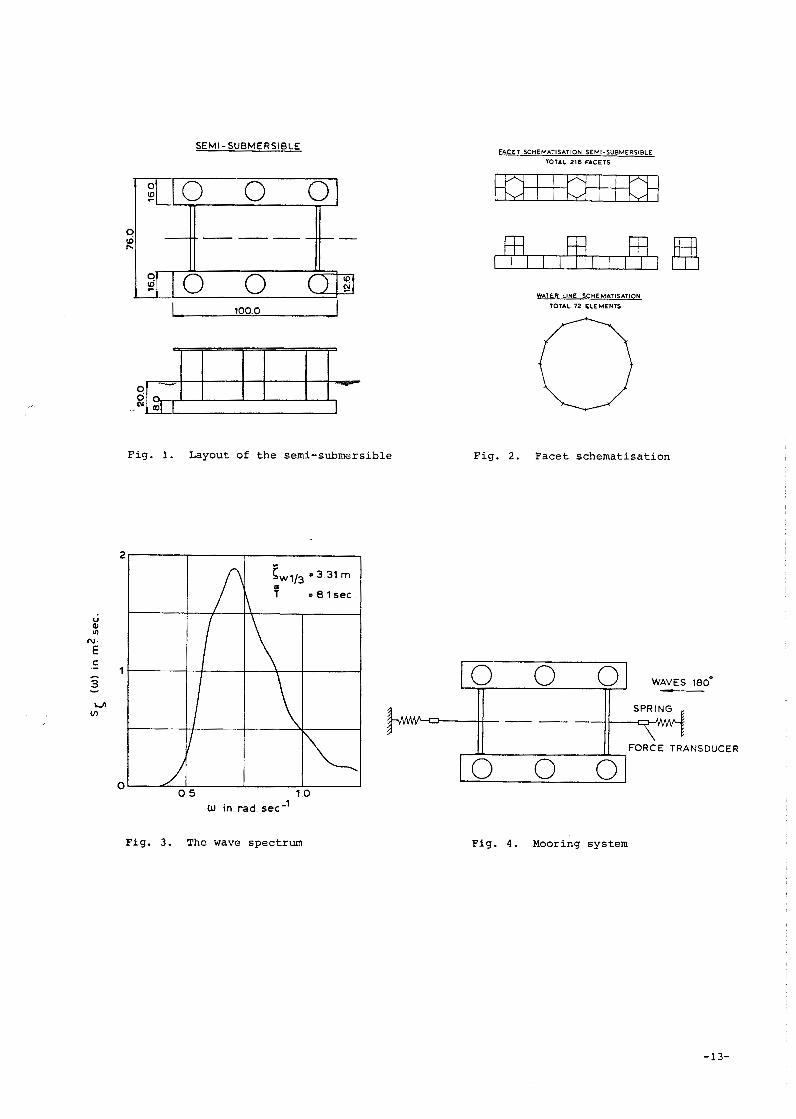
I n o r d e r t o measure t h e low frequency wave d r i f t f o r c e on t h e semi-submersible use was made of a s t i f f l i n e a r s p r i n g mooring system. The se t -up i s shown schemat i ca l ly i n F igu re 4. The s t i f f n e s s of t h e s p r i n g s was chosen such t h a t t h e n a t u r a l frequency o f t h e su rge motion was j u s t o u t s i d e t h e f requency range of t h e i r r e g u l a r waves. The n a t u r a l su rge frequency co r re - sponded wi th 0 .4 r ad . / s ec . f u l l s c a l e . I n s p i t e o f t h e r e l a t i v e l y l a r g e s t i f f n e s s of t h e moor- i n g system, t h e wave f requency motions were on ly s l i g h t l y a f f e c t e d i n t h e range of t h e wave f r e q u e n c i e s p r e s e n t i n t h e spectrum. Th i s i s shown i n F igu re 5 i n which r e s u l t s o f wave f r e - quency heave, p i t c h and s u r g e motion response computations a r e shown w i t h and wi thou t t h e e f f e c t of t h e s t i f f mooring system. I n F igu re 6 t h e e f f e c t of t h e mooring s t i f f n e s s on t h e computed v a l u e s o f t h e mean d r i f t f o r c e i n r e g u l a r waves i s shown. Again t h e i n f l u e n c e of t h e mooring s t i f f n e s s i s s m a l l , which i n d i c a t e s t h a t t h e low frequency wave d r i f t f o r c e on t h e v e s s e l i n t h e s t i f f mooring system i s p r a c t i c a l l y t h e same a s it would be on t h e v e s s e l moored i n a s o f t system.
The mean and low f requency wave d r i f t f o r c e was found from t h e mooring f o r c e measure- ments ( s e e F igu re 4 ) . Due t o t h e mooring system t h e measured low frequency f o r c e w i l l t e n d t o s u f f e r from magn i f i ca t ion e f f e c t s a s t h e frequency of i n t e r e s t i n c r e a s e s from z e r o upward t o t h e n a t u r a l su rge f requency. For t h e p r e s e n t c a s e , low f requency d r i f t f o r c e s wi th f r e q u e n c i e s up t o 0.1 r a d . / s e c . f u l l s c a l e s u f f e r e d l e s s t h a n 6 p e r c e n t from dynamic magn i f i ca t ion e f f e c t s . T h i s means t h a t t h e low frequency components o f t h e measured mooring f o r c e could be equated t o t h e wave d r i f t f o r c e up t o a frequency of 0 .1 r ad . / s ec . f u l l s c a l e . Above t h i s f requency magni- f i c a t i o n e f f e c t s i n c r e a s e d above 6 p e r c e n t .
TEST SET-UP FOR THE MOTION TEST
The p r i n c i p l e of t h e t es t se t -up f o r t h i s test i s a l s o shown i n F igu re 4. I n t h i s ca se , however, t h e mooring s t i f f n e s s was cons ide rab ly l e s s . The n a t u r a l frequency of t h e su rge motion amounted t o 0.036 r a d . / s e c . f u l l s c a l e , which corresponds t o a n a t u r a l p e r i o d of 176 seconds. Surge motion decay t e s t s t o de termine t h e s t i l l wa te r damping c o e f f i c i e n t s b l l and b2 o f equa- t i o n (31) were a l s o c a r r i e d o u t i n t h e s o f t s p r i n g system. From t h e s e tests t h e fo l lowing v a l u e s were found:
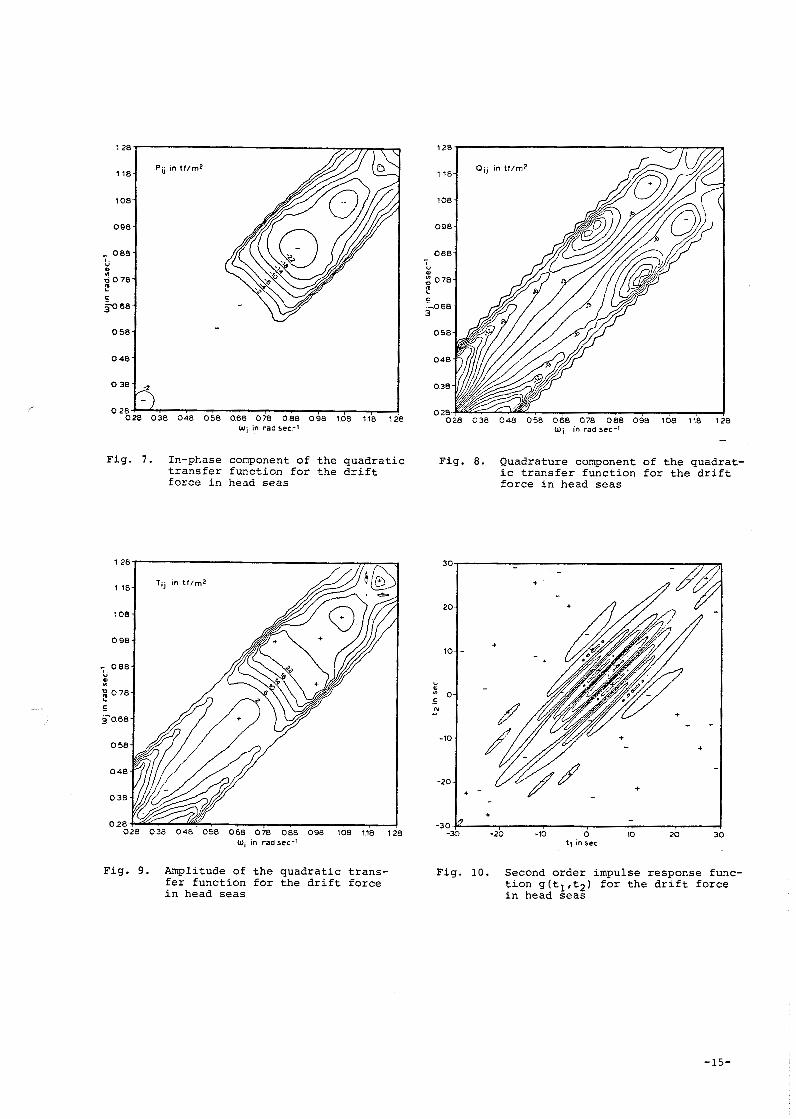
RESULTS OF COMPUTATIONS OF THE QUADRATIC TRANSFER FUNCTION AND THE SECOND ORDER IMPULSE RESPONSE FUNCTION
I n F igu re 7 and F igure 8 p l o t s a I e g iven of t h e q u a d r a t i c t r a n s f e r f u n c t i o n s P i j and Q i j r e s p e c t i v e l y of t h e d r i f t f o r c e i n head waves. The p l o t s show t h e contour l i n e s o f t h e f u n c t i o n s P and Q i j i n t h e w i , w j f requency p l ane . I n each p l o t numbers have been a s s igned t o t h e con- 3.3 t o u r s . These e x p r e s s t h e v a l u e s o f P i j and Q i i n m e t r i c tons/m2. The p l o t s on ly cover p a r t o f t h e t o t a l wi,u p l ane . For l w i - U, l > 0.24 t i e t r a n s f e r f u n c t i o n s have n o t been computed and have been set 20 ze ro . The r a p i d f a l l - o f f of t h e f u n c t i o n s a long t h e l i n e s i w i - W . l = 0.21 i s t h e r e f o r e n o t a c h a r a c t e r i s t i c of t h e f u n c t i o n s b u t due t o t r u n c a t i o n . Data f o r l a g g e r d i f f e r - ence f r e q u e n c i e s a r e n o t r e l e v a n t f o r t h e low frequency s u r g e motions. For o t h e r modes o f mo- t i o n , f o r i n s t a n c e , when low frequency v e r t i c a l motions a r e impor t an t , it may be necessa ry t o e n l a r g e t h e t r a n s f e r f u n c t i o n s t o l a r g e r d i f f e r e n c e f r equenc ie s . The f u n c t i o n P i j g iven i n Fig- u r e 7 i s symmetrical about t h e l i n e w i = wj whi l e t h e f u n c t i o n Q i j g iven i n F igu re 8 is a n t i - symmetrical about t h e l i n e wi = w j . Th i s i s i n keeping wi th equa t ions (20) and (21 ) . I n F igu re 7 t h e d a t a on t h e l i n e w i = W, cor responds wi th t h e mean d r i f t f o r c e s i n r e g u l a r waves shown i n F i g u r e 6. The n e g a t i v e s i g n o f P i n d i c a t e s t h a t t h e mean f o r c e i n head waves is d i r e c t e d a f t . I t i s noted t h a t t h e f u n c t i o n P i i j i n F igu re I g e n e r a l l y has i t s lowest va lues on t h e d i agona l W = = W,. T h i s f u n c t i o n t e n d s t o l n c r e a s e a s t h e d i f f e r e n c e f requency Iwi - w j l i s inc reased . Below a f requency o f about 0.75 r ad . / s ec . t h e r e a r e no con tour l i n e s excep t nea r t h e f requency
0.3 r ad . / s ec . A t t h i s f requency a s l i g h t "dip" i s shown i n Pi,. Th i s frequency corresponds t o t h e n a t u r a l heave and p i t c h f requency of t h e v e s s e l . I n between 0.75 r ad . / s ec . and 0.3 r ad . / s ec . t h e f u n c t i o n Pi j remains above t h e v a l u e of -2 and below zero . The f i r s t contour l i n e marks t h e -2 l e v e l , hence no contour l i n e s o f P i j a r e shown i n t h i s i n t e r v a l . The dec rease ( l a r g e r nega- t i v e v a l u e s i n d i c a t i n g t h a t t h e a f t d i r e c t e d f o r c e i s i n c r e a s i n g ) i n t h e va lue of Pi , above f r e q u e n c i e s o f abou t 0.75 r ad . / s ec . i s a s s o c i a t e d wi th i n c r e a s i n g d i f f r a c t i o n e f f e c t s . The s t r u c - t u r e becomes l a r g e r e l a t i v e t o t h e wave l e n g t h and more wave energy i s r e f l e c t e d back. The peaks and t roughs shown i n F igu re '7 a r e due t o changing i n t e r a c t i o n e f f e c t s occur r ing between t h e s i x columns of t h e semi-submersible. T h i s is a l s o r e f l e c t e d i n F igu re 6 , i n which t h e mean d r i f t f o r c e i n r e g u l a r waves i s shown. The r e s u l t s i n t h i s f i g u r e correspond t o t h e va lues on t h e d i - agonal o f F igu re 7.
As i n d i c a t e d p r e v i o u s l y , t h e f u n c t i o n Q i . shown i n F igu re 8 is anti-symmetric about t h e d i agona l . On t h e d i agona l t h e v a l u e s a r e zero . i s one moves f u r t h e r away from t h e d i agona l t h e v a l u e s , i n a b s o l u t e sense , i n c r e a s e . For low v a l u e s o f w i and w j , Q i j i n c r e a s e s more r a p i d l y a s / m i - w j I t n c r e a s e s . Th i s i s due t o c o n t r i b u t i o n V t o t h e d r i f t f o r c e which i s g iven i n equa t ion ( 7 ) . F o r h i g h e r va lues of w i and w j , Q i j shows peaks and t roughs which a r e again a s s o c i a t e d wi th d i f f r a c t i o n and i n t e r a c t i o n e f f e c t s between columns of t h e semi-submersible. For I w i - u . l > 0.24, Qi j f a l l s o f f r a p i d l y . T h i s i s aga in due t o t r u n c a t i o n . 3
I n F igu re 9 t h e ampl i tude Tij o f t h e wave d r i f t f o r c e t r a n s f e r f u n c t i o n i s given. T h i s i s d e f i n e d by:
By d e f i n i t i o n T i j i s symmetric about t h e d i agona l . I n s p e c t i o n of T i i n comparison wi th P i j and Qi, shows t h a t f o r h i g h e r v a l u e s o f o i and u, t h e ampl i tude T i . i s dominated by t h e in-phase . For lower v a l u e s o f w i and w j , t h e quadra tu re p a r t hi i s dominant. Fo r f requency ::;:eziareater t h a n about 0.75 rad . /sec. , T i v a l u e s dec rease r a p i d l y . Between 0.75 r ad . / s ec . and 0.91 rad . / sec . t h e con tour s of Ti, t e n d 20 run a t r i g h t - a n g l e s t o t h e d i agona l w i = o j f o r /toi - w j l v a l u e s o f up t o abou t 0 .1 r ad . / s ec . T h i s type of behaviour t e n d s t o f avour t h e use o f approximate methods f o r computing d r i f t f o r c e s i n i r r e g u l a r waves a s , f o r i n s t a n c e , g iven by P i n k s t e r [12 ] . Th i s i s because i n such c a s e s t h e o f f -d i agona l v a l u e s o f Ti , can be r e p l a c e d by t h e va lue on t h e d i agona l Tnn where t h e f requency wn i s equa l t o t h e mean of t h e f r e q u e n c i e s w i and U,. For lower v a l u e s of t h e f r e q u e n c i e s w i and w j t h e va lues o f T i j a r e changing more r ap id - l y when moving away from t h e d i agona l w i = w j . Th i s t e n d s t o make approximative methods, which a r e based on t h e d a t a on t h e d i a g o n a l o n l y , l e s s accep tab le .
F igu res 7, 8 and 9 show t h a t t h e q u a d r a t i c t r a n s f e r f u n c t i o n is a compl ica ted s u r f a c e i n t h e w i , w j p l ane . Some of i t s f e a t u r e s a r e r e a d i l y a s s o c i a t e d w i t h known p h y s i c a l e f f e c t s . A f u l l unders tanding o f t h e q u a d r a t i c t r a n s f e r f u n c t i o n w i l l r e q u i r e more s y s t e m a t i c computa- t i o n s .
I n F igu re 10, t h e second o r d e r impulse response f u n c t i o n g ( 2 ) (tl,t2) computed acco rd ing t o equa t ion (23) i s shown. The f u n c t i o n g ( 2 ) ( t l , t 2 ) i s shown f o r tl and t 2 va lues from -30 sec. t o +30 sec . T h i s is only p a r t of t h e complete f u n c t i o n which was CO t e d f o r tl and t 2 from -78 s e c . t o +78 sec . w i th a sample t ime o f 1.14 sec . The f u n c t i o n g T 3 y ( t l , t 2 ) i s r e a l and sym- m e t r i c a l about t h e d i agona l t l = t 2 . It reaches i t s l a r g e t va ues , i n a b s o l u t e sense , on t h e d i agona l . The l a r g e s t va lue on t h e d i agona l is -0.48 t f .mS/sec t f o r tl = t 2 = 6.8 s e c . The con- t o u r s o f t h e f u n c t i o n g e n e r a l l y run p a r a l l e l t o t h e d i agona l i n d i c a t i n a s t r o n g dependence on t h e t ime d i f f e r e n c e tl - t 2 . As we move away from t h e d i agona l , g ( 2 y 1 t l , t 2 ) o s c i l l a t e s i n s i g n and decays. The same behaviour was a l s o found by D a l z e l l [ l 1 1 when s tudy ing t h e q u a d r a t i c impulse response f u n c t i o n f o r t h e added r e s i s t a n c e o f a v e s s e l t r a v e l l i n g i n head waves.
The f u n c t i o n g ( 2 ) ( t l , t 2 ) is t o o compl ica ted t o be a b l e t o i d e n t i f y any p a r t i c u l a r phys- i c a l phenomena a s having i n f l u e n c e on a p a r t i c u l a r f e a t u r e o f t h e func t ion . Again, s y s t e m a t i c computations i n which, f o r i n s t a n c e , t h e geometry o f a p l a t f o r m i s changed, can be used t o g e t a b e t t e r f e e l f o r t h e s i g n i f i c a n c e o f such d a t a .
RESULTS OF TIME DOMAIN COMPUTATIONS OF THE DRIFT FORCE
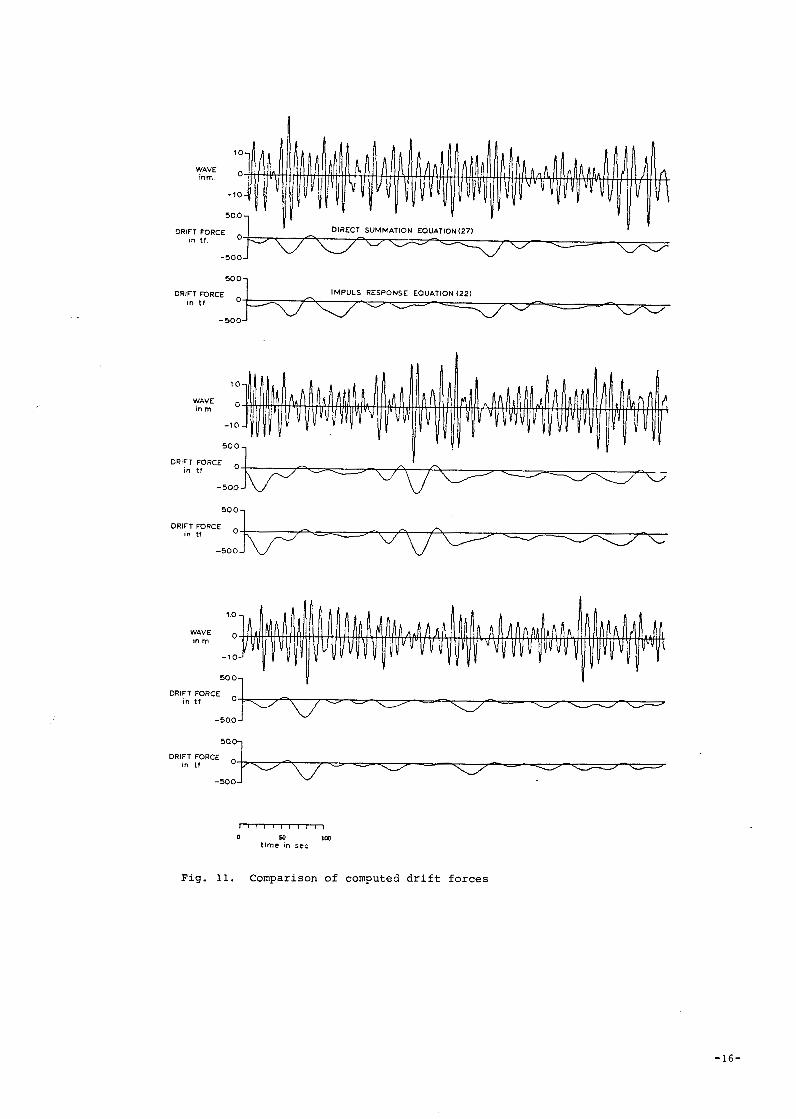
I n o r d e r t o v e r i f y t h a t t h e wave d r i f t f o r c e i n i r r e g u l a r waves i s computed c o r r e c t l y u s i n g t h e q u a d r a t i c t r a n s f e r f u n c t i o n and e q u a t i o n ( 2 2 ) , t h e r e s u l t s ob ta ined i n t h i s way a r e compared wi th r e s u l t s o b t a i n e d by a p p l i c a t i o n o f t h e d i r e c t summation t echn ique g iven by equa t ion (27) . To t h i s end a wave t r a i n corresponding t o t h e wave spect rum i n F igu re 3 was gene ra t ed based on equa t ion (9 ) u s i n g 600 e q u i d i s t a n t f requency components. For t h i s wave t r a i n t h e " t r u e " wave d r i f t f o r c e s i g n a l i s o b t a i n e d from equa t ion (2'7) u s i n g d a t a on Pij and Q i j shown i n F i g u r e s 7 and 8. The wave d r i f t f o r c e s i g n a l was a l s o computed u s i n g t h e second o r d e r impulse r e sponse f u n c t i o n g ( 2 ) ( t l , t2) and e q u a t i o n ( 2 2 ) . The r e s u l t s a r e compared i n F igu re 11. I t can b e seen t h a t t h e agreement between t h e two methods i s e x c e l l e n t , t h u s g i v i n g conf idence i n t h e app l i ca - b i l i t y of equa t ion (22) t o a r b i t r a r y measured wave r eco rds .
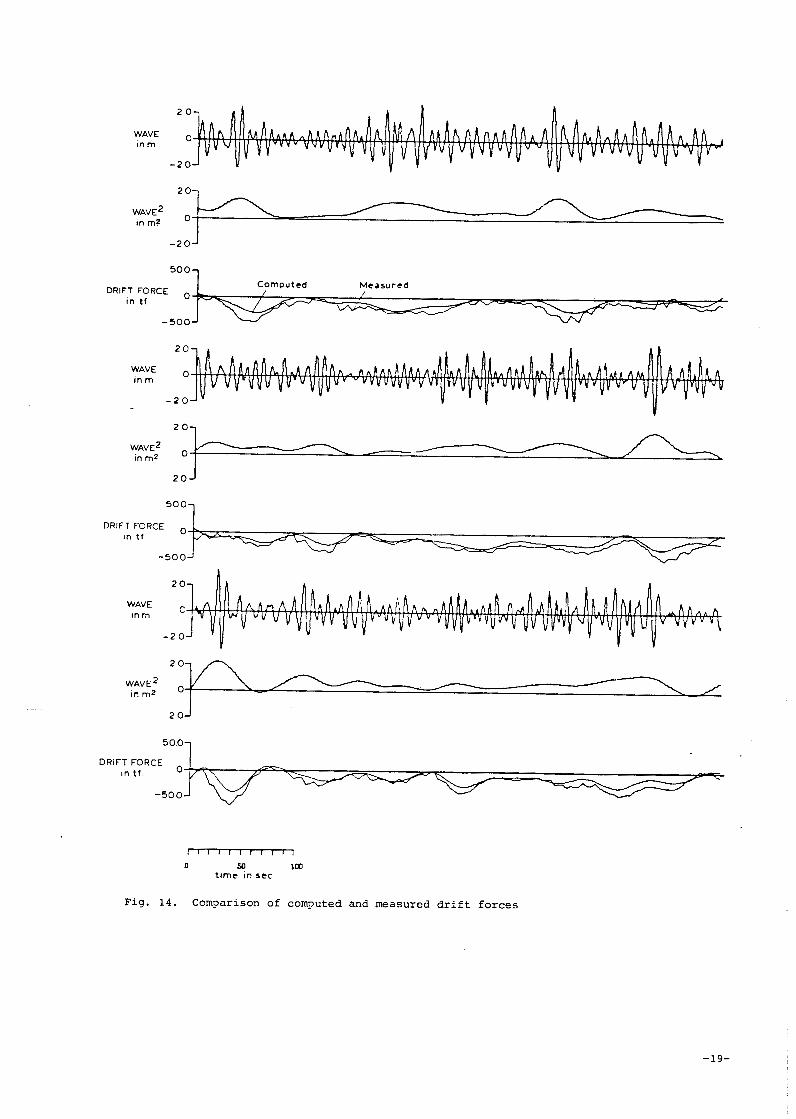
COMPARISON OF MEASURED AND COMPUTED DRIFT FORCES
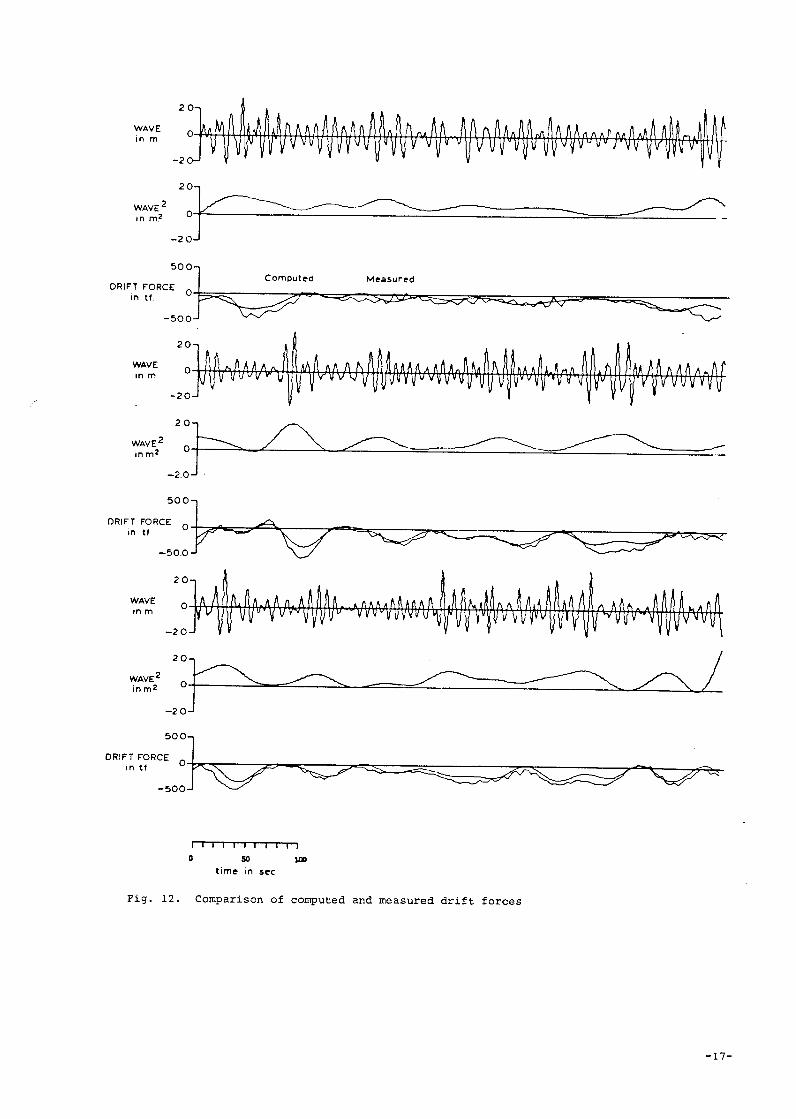
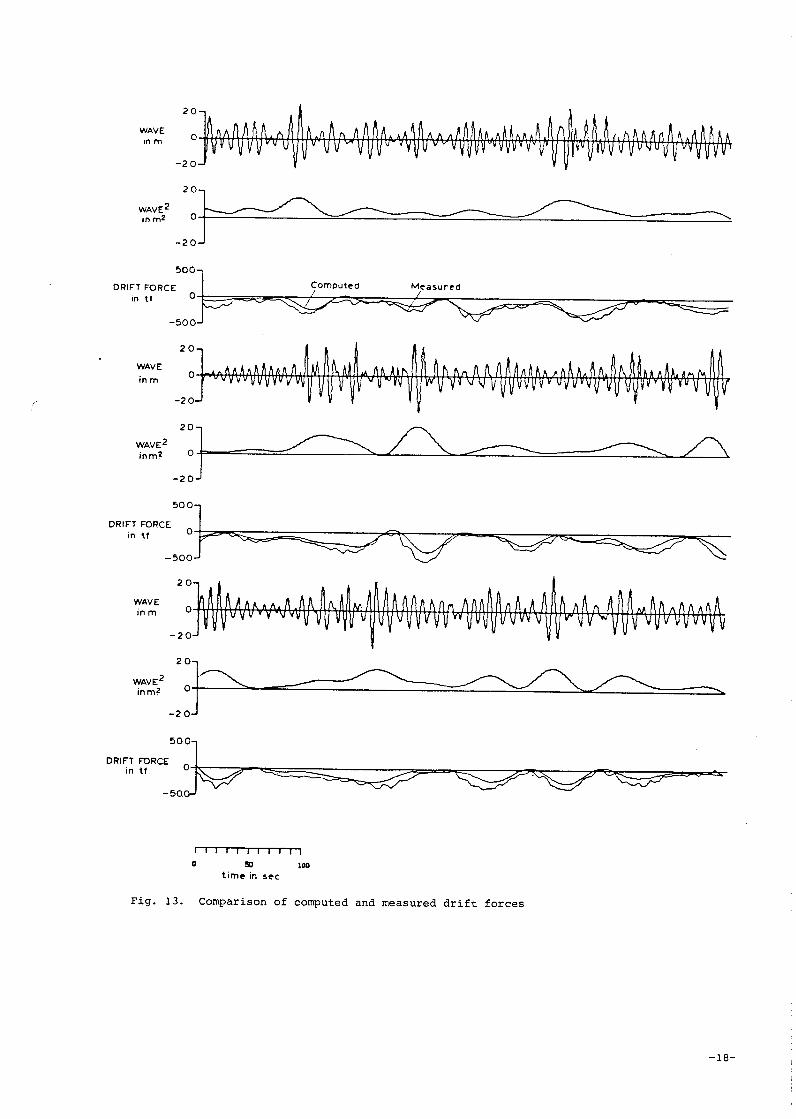
In Figures 12, 13 and 1 4 time records of t h e measured and computed low frequency surge d r i f t f o r c e i n i r r e g u l a r waves a r e given. In these f i g u r e s t h e record of t h e waves and t h e low frequency p a r t of t h e square of the wave e leva t ion a r e a l s o given. A l l records , except f o r t h e wave record , have been low-pass f i l t e r e d s o a s t o e l imina te f requencies higher than about 0.1 rad. /sec . f u l l sca le . The measured fo rce record s t i l l con ta ins some higher frequency components. This is due t o the s t i f f mooring system used f o r t h i s t e s t , which r e s u l t e d i n l a r g e wave f r e - quency fo rce components. A s was shown previously , those d id n o t in f luence t h e wave frequency motions s i g n i f i c a n t l y . The record of t h e low-pass f i l t e r e d square of the wave e l e v a t i o n i s in - cluded t o show the c l e a r r e l a t i o n s h i p between t h e f o r c e and t h i s quan t i ty . The computed record i s based upon the measured wave record and equation (22) .
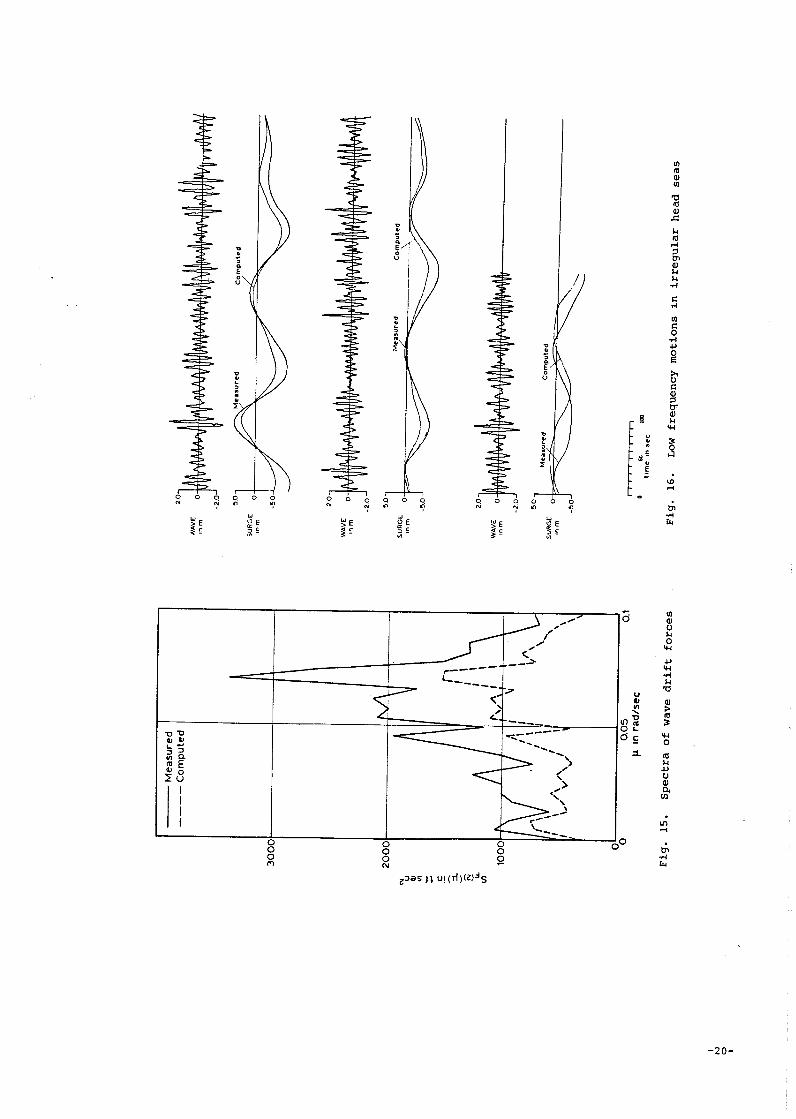
I n Figure 15 the s p e c t r a l dens i ty of the measured and computed wave d r i f t f o r c e records a r e shown up t o a frequency of 0.1 rad. /sec . f u l l sca le . The s p e c t r a l d e n s i t i e s were computed based on a record l eng th of 6 hours f u l l s c a l e us ing t h e au to -cor re la t ion func t ion method. The sample per iod was 3.79 seconds and 200 l a g s were used t o compute t h e au to -cor re la t ion funct ions . No smoothing was applied.
From t h e comparison it can be concluded t h a t t h e computed wave d r i f t f o r c e record i s i n good q u a l i t a t i v e agreement with t h e measured f o r c e record. The s p e c t r a l d e n s i t i e s of both rec- o rds given i n Figure 15 a r e very s i m i l a r i n form only, t h e magnitude is somewhat d i f f e r e n t . I n genera l it appears t h a t the computations underestimate t h e wave d r i f t fo rce both i n t h e mean value and i n t h e amplitude of t h e slowly varying components by 30 t o 40 p e r cent . The good agree- ment between t h e d i r e c t summation technique and t h e second o r d e r impulse response technique ( see Figure 11) i n d i c a t e s t h a t i n t h i s case , t h e cause of t h e d i f f e r e n c e s may l i e i n inaccura- c i e s i n t h e f o r c e measurements, inaccurac ies i n t h e computation of t h e q u a d r a t i c t r a n s f e r func- t i o n s o r be caused by phys ica l e f f e c t s n o t taken i n t o account i n t h e computations such a s f o r c e s of v iscous o r i g i n . This w i l l be a s u b j e c t f o r f u r t h e r r esea rch and no d e f i n i t e conclusions can be drawn a t t h i s time.
COMPARISON OF COMPUTED AND MEASURED LOW FREQUENCY SURGE MOTIONS
I n Figure 16 r e s u l t s a r e given of the computed and measured low frequency surge motions of t h e semi-submersible. The computed surge motions were determined based on equat ion (31) using t h e computed wave d r i f t fo rce s i g n a l . Also shown i n t h e f i g u r e i s t h e measured wave e l e v a t i o n . The d u r a t i o n of t h e motion t e s t corresponded t o 30 minutes f u l l s c a l e . The t r a n s i e n t components i n t h e computed surge t ake about 10 minutes t o d i e o u t , t h u s l eav ing about 20 minutes f o r t h e com- par i son . The comparison shows t h a t t h e computed surge record corresponds q u i t e w e l l wi th the mea- su red record with respec t t o t h e phase of t h e motion and the genera l f e a t u r e s of t h e record. The amplitudes of t h e computed record a r e , however, somewhat lower than t h e measured values . This i s i n agreement with t h e previously found d i f f e r e n c e s between t h e measured and computed low frequency d r i f t fo rces .
CONCLUSIONS
In t h i s paper a genera l method t o determine t h e low frequency wave d r i f t fo rces on a v e s s e l f l o a t i n g i n i r r e g u l a r waves has been descr ibed. Appl icat ion of t h i s method t o t h e case of a s i x column semi-submersible and comparison of r e s u l t s of time domain computations of wave d r i f t f o r c e s and low frequency motions wi th r e s u l t s of model t e s t s has shown t h a t , i n a qua l i - t a t i v e sense , both t h e wave d r i f t f o r c e s and t h e low frequency motions a r e w e l l p r e d i c t e d by computations. The computed d r i f t f o r c e s , however, f a l l below t h e measured d r i f t f o r c e s by some 30 t o 40 pe r cent . Using t h e computed d r i f t f o r c e s , t i m e domain s imula t ions of t h e low frequency h o r i z o n t a l motions show t h e same order of d i f f e r e n c e s compared t o r e s u l t s of measurements.
More i n v e s t i g a t i o n s w i l l be c a r r i e d out t o determine t h e phenomena which may e f f e c t t h e d i f f e r e n c e s . The computations of wave d r i f t f o r c e s have been based on p o t e n t i a l theory. Resu l t s given i n t h i s paper i n d i c a t e t h a t , al though d i f f e r e n c e s e x i s t between r e s u l t s of measurements and computations, f o r t h i s case a t l e a s t , t h e low frequency wave d r i f t fo rces a c t i n g on t h e semi-submersible a r e dominated by p o t e n t i a l e f f e c t s .
REFERENCES
l. Hooft, J.P., 1972, Hydrodynamic aspec t s of semi-submersible pla t forms, Netherlands Ship Model Basin, Pub l ica t ion No. 400.
2. Wahab, R . , 1974, Wave induced motions and d r i f t f o r c e s on a f l o a t i n g s t r u c t u r e , Nether- lands Ship Research Centre, TNO, D e l f t , Report No. 1865.
3. P i j f e r s , J . G . L . and Brink, A.W., 1977 , "Calculated d r i f t f o r c e s of two semi-submersible pla t form types i n r e g u l a r and i r r e g u l a r waves", Offshore Technology Conference, Houston,
P a p e r No. 2977.
F e r r e t t i , C. and B e r t a , N . , 1980, "Viscous e f f e c t c o n t r i b u t i o n t o t h e d r i f t f o r c e s on a f l o a t i n g s t r u c t u r e " , I n t e r n a t i o n a l Symposium on Ocean E n g i n e e r i n g and S h i ~ h a n d l i n q , Gothenburg , 1980.
Karppinen , T.1 1979, An a p p r o a c h t o computing t h e s e c o n d o r d e r s t e a d y f o r c e s o n semi- s u b m e r s i b l e s t r u c t u r e s , H e l s i n k i U n i v e r s i t y o f Technology , S h i p Hydrodynamics L a b o r a t o r y , R e p o r t No. 16 .
P i n k s t e r , J.A. and Van O o r t m e r s s e n , G . , 1977, "Computat ion o f t h e f i r s t and s e c o n d o r d e r wave f o r c e s on b o d i e s o s c i l l a t i n g i n r e g u l a r waves", P r o c e e d i n g s Second I n t e r n a t i o n a l Conference on Numer ica l S h i p Hydrodynamics, B e r k e l y , 1977.
P i n k s t e r , J .A. , 1980, Low f r e q u e n c y s e c o n d o r d e r wave e x c i t i n g f o r c e s on f l o a t i n g s t r u c - t u r e s , N e t h e r l a n d s S h i p Model B a s i n , P u b l i c a t i o n No. 650.
D a l z e l l , J .F. , 1976, " A p p l i c a t i o n o f t h e f u n d a m e n t a l p o l y n o m i a l model t o t h e s h i p added r e s i s t a n c e problem", E l e v e n t h Symposium on Naval Hydrodynamics, U n i v e r s i t y C o l l e g e , London, 1976.
B o r e e l , L . J . , 1974, "Wave a c t i o n on l a r g e o f f s h o r e s t r u c t u r e s " , Conference on O f f s h o r e S t r u c t u r e s , I n s t i t u t e o f C i v i l E n g i n e e r s , London.
Van Oor tmerssen , G . , 1976, The m o t i o n s o f a moored s h i p i n waves, N e t h e r l a n d s S h i p Model B a s i n , P u b l i c a t i o n No. 510.
D a l z e l l , J .F. , 1975, The a p p l i c a b i l i t y o f t h e f u n c t i o n a l p o l y n o m i a l i n p u t - o u t p u t model t o s h i p r e s i s t a n c e i n waves , S t e v e n s I n s t i t u t e o f Technology, Davidson L a b o r a t o r y , R e p o r t SIT-DL-75-1794.
P i n k s t e r , J .A. , 1974 , "Low f r e q u e n c y phenomena a s s o c i a t e d w i t h v e s s e l s moored a t s e a " , European S p r i n g Meet ing o f SPE-AIME, Amsterdam, P a p e r SPE 483'7.
TABLE I
MAIN PARTICULARS OF SEMI-SUBMERSIBLE
D e s i g n a t i o n
Length be tween p e r p e n d i c u l a r s
B r e a d t h
Draught
D i s p l a c e m e n t volume
Water d e p t h
Symbol
L~~
B
T
V
Wd
U n i t
m
m
m
m 3-
m
V a l u e
100.00
76.00
20.00
35,925
40.00
SEMI - SUBMERSIBLE
Fig. 1. Layout of the semi-submersible
FACET X H E M A T I S A T I O H SEMI-SUBMERSIBLE
TOTAL 216 FACETS
WATER LINE SCHEMATISATION
TOTAL 72 ELEMENTS
Fig. 2. Facet schematisation
W in rad sec-'
Fig. 3. The wave spectrum Fig. 4. Mooring system
- - --
FORCE TRANSDUCER -
l0 0 0 1
- FREE-FLOATING D IN STIFF MOORING SYSTEM
w in rad sec -'
Fig. 5. In f luence of mooring system s t i f f n e s s on f i r s t o rde r motions
FREE FLOATING 0 IN STIFF MOORING SYSTEM I-
U in rad sec:'
Fig. 6 . Inf luence of mooring system s t i f f n e s s on mean d r i f t f o r c e s
W i in rad sec-' W i in rad sec-'
Fig. '7. In-phase component of t h e q u a d r a t i c Fig. 8. Quadrature component of t h e quadrat- t r a n s f e r funct ion f o r t h e d r i f t i c t r a n s f e r func t ion f o r t h e d r i f t fo rce i n head s e a s f o r c e i n head s e a s
W, In rad sec-'
+ -30 ,
- -30 -20 -10 0
I 10 20 30
11 In sec
Fig. 9. Amplitude of t h e quadra t i c t r a n s - Fig. 10. Second o rder impulse response func- f e r funct ion f o r the d r i f t f o r c e t i o n g ( t l , t 2 ) f o r t h e d r i f t fo rce i n head seas i n head seas
DRIFT FORCE IMPULS RESPONSE EQUATION 122) in t f
- 5 0 0 -
1 0
WAVE In m
-1 0
5 0 0
DRIFT FORCE In t f
- 5 0 0
5 0 0 -
DRIFT FORCE In tf L
-500-2
DRIFT FORCE In t f /'
- V
-500- '
DRIFT FORCE ~n tf /v - -
-500- - 0 %l im
t i m e tn sec
F ig. 11. Comparison of computed d r i f t forces
WAVE in m
50 0- Computed Measured
DRIFT FORCE - in tf
-500-
2 0
WAVE tn m
-20-1 ' V ' - ' V
DRIFT FORCE A
in t f A
-50 0-
2 0
WAVE in m
-2oJ Y Y - ' T l
DRIFT FORCE in t f
-
-500-
- 0 SO
t ime in sec
Fig. 12. Comparison of computed and measured drift forces
2 0
WAVE
-2 0
DRIFT FORCE In t t 0
-500-
DRIFT FORCE ~n 11
2 0
WAVE in m 0
-20
Computed Measured
0- e'
2 o-l
-500-
500-
DRIFT FORCE In t t
- 5QO-
0 S 100
t ime in sec
Fig. 13. Comparison of computed and measured d r i f t forces
2 0
WAVE In m
- 2 0 I ' v Y
DRIFT FORCE Computed Measured
in t t /
-500-
2 0
WAVE In m
- 2 0 I
0 5D lrn t tme In sec
Fig. 14. Comparison of computed and measured drift forces






![L 22 – Vibrations and Waves [3] resonance clocks – pendulum springs harmonic motion mechanical waves sound waves golden rule for waves Wave.](https://static.documents.pub/doc/80x56/56649e485503460f94b3b92b/l-22-vibrations-and-waves-3-resonance-clocks-pendulum-springs.jpg)
