8
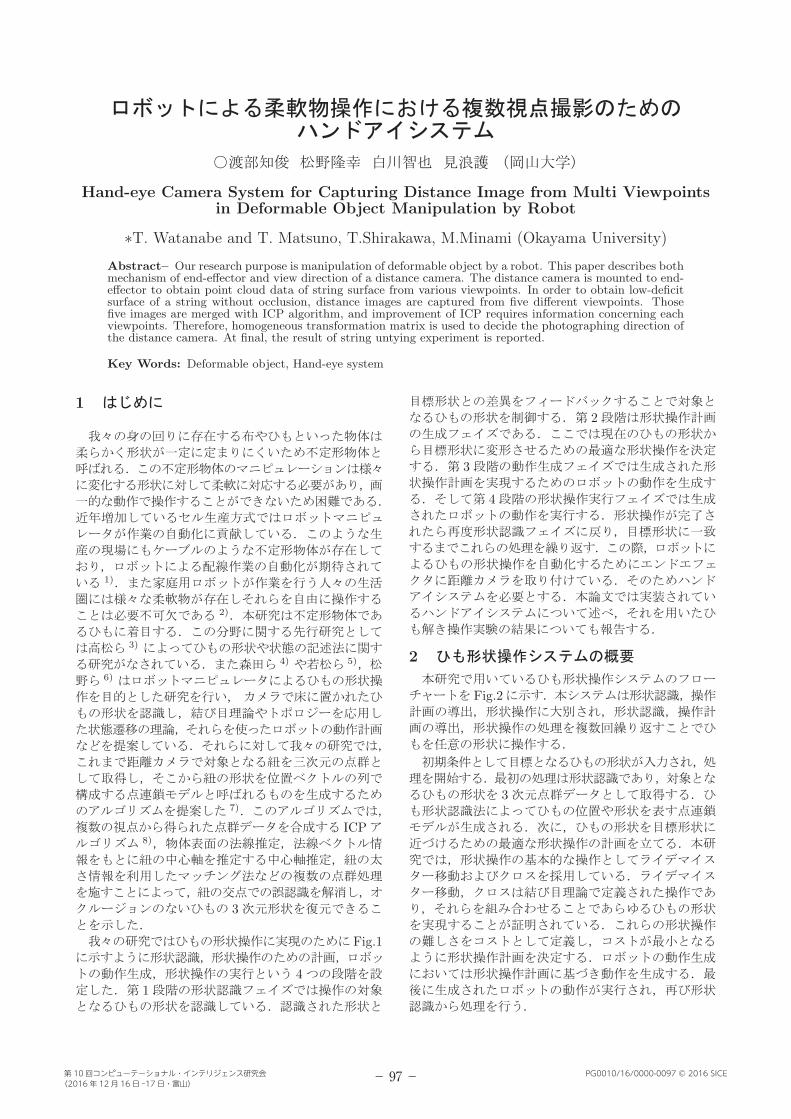
- 97 - ロボットによる柔軟物操作における複数視点撮影のための ハンドアイシステム ○渡部知俊 松野隆幸 白川智也 見浪護 (岡山大学) Hand-eye Camera System for Capturing Distance Image from Multi Viewpoints in Deformable Object Manipulation by Robot *T. Watanabe and T. Matsuno, T.Shirakawa, M.Minami (Okayama University) Abstract– Our research purpose is manipulation of deformable object by a robot. This paper describes both mechanism of end-effector and view direction of a distance camera. The distance camera is mounted to end- effector to obtain point cloud data of string surface from various viewpoints. In order to obtain low-deficit surface of a string without occlusion, distance images are captured from five different viewpoints. Those five images are merged with ICP algorithm, and improvement of ICP requires information concerning each viewpoints. Therefore, homogeneous transformation matrix is used to decide the photographing direction of the distance camera. At final, the result of string untying experiment is reported. Key Words: Deformable object, Hand-eye system 1 はじめに 我々の身の回りに存在する布やひもといった物体は 柔らかく形状が一定に定まりにくいため不定形物体と 呼ばれる.この不定形物体のマニピュレーションは様々 に変化する形状に対して柔軟に対応する必要があり,画 一的な動作で操作することができないため困難である. 近年増加しているセル生産方式ではロボットマニピュ レータが作業の自動化に貢献している.このような生 産の現場にもケーブルのような不定形物体が存在して おり,ロボットによる配線作業の自動化が期待されて いる 1) .また家庭用ロボットが作業を行う人々の生活 圏には様々な柔軟物が存在しそれらを自由に操作する ことは必要不可欠である 2) .本研究は不定形物体であ るひもに着目する.この分野に関する先行研究として は高松ら 3) によってひもの形状や状態の記述法に関す る研究がなされている.また森田ら 4) や若松ら 5) ,松 野ら 6) はロボットマニピュレータによるひもの形状操 作を目的とした研究を行い, カメラで床に置かれたひ もの形状を認識し,結び目理論やトポロジーを応用し た状態遷移の理論,それらを使ったロボットの動作計画 などを提案している.それらに対して我々の研究では, これまで距離カメラで対象となる紐を三次元の点群と して取得し,そこから紐の形状を位置ベクトルの列で 構成する点連鎖モデルと呼ばれるものを生成するため のアルゴリズムを提案した 7) .このアルゴリズムでは, 複数の視点から得られた点群データを合成する ICP ア ルゴリズム 8) ,物体表面の法線推定,法線ベクトル情 報をもとに紐の中心軸を推定する中心軸推定,紐の太 さ情報を利用したマッチング法などの複数の点群処理 を施すことによって,紐の交点での誤認識を解消し,オ クルージョンのないひもの 3 次元形状を復元できるこ とを示した. 我々の研究ではひもの形状操作に実現のために Fig.1 に示すように形状認識,形状操作のための計画,ロボッ トの動作生成,形状操作の実行という 4 つの段階を設 定した.第 1 段階の形状認識フェイズでは操作の対象 となるひもの形状を認識している.認識された形状と 目標形状との差異をフィードバックすることで対象と なるひもの形状を制御する.第 2 段階は形状操作計画 の生成フェイズである.ここでは現在のひもの形状か ら目標形状に変形させるための最適な形状操作を決定 する.第 3 段階の動作生成フェイズでは生成された形 状操作計画を実現するためのロボットの動作を生成す る.そして第 4 段階の形状操作実行フェイズでは生成 されたロボットの動作を実行する.形状操作が完了さ れたら再度形状認識フェイズに戻り,目標形状に一致 するまでこれらの処理を繰り返す.この際,ロボットに よるひもの形状操作を自動化するためにエンドエフェ クタに距離カメラを取り付けている.そのためハンド アイシステムを必要とする.本論文では実装されてい るハンドアイシステムについて述べ,それを用いたひ も解き操作実験の結果についても報告する. 2 ひも形状操作システムの概要 本研究で用いているひも形状操作システムのフロー チャートを Fig.2 に示す.本システムは形状認識,操作 計画の導出,形状操作に大別され,形状認識,操作計 画の導出,形状操作の処理を複数回繰り返すことでひ もを任意の形状に操作する. 初期条件として目標となるひもの形状が入力され,処 理を開始する.最初の処理は形状認識であり,対象とな るひもの形状を 3 次元点群データとして取得する.ひ も形状認識法によってひもの位置や形状を表す点連鎖 モデルが生成される.次に,ひもの形状を目標形状に 近づけるための最適な形状操作の計画を立てる.本研 究では,形状操作の基本的な操作としてライデマイス ター移動およびクロスを採用している.ライデマイス ター移動,クロスは結び目理論で定義された操作であ り,それらを組み合わせることであらゆるひもの形状 を実現することが証明されている.これらの形状操作 の難しさをコストとして定義し,コストが最小となる ように形状操作計画を決定する.ロボットの動作生成 においては形状操作計画に基づき動作を生成する.最 後に生成されたロボットの動作が実行され,再び形状 認識から処理を行う. PG0010/16/0000-0097 © 2016 SICE 第 10 回コンピューテーショナル・インテリジェンス研究会 (2016 年 12 月 16 日 -17 日・富山)






![Ô D å è © C ] a ø H a ] C...ñ ¸ ¢ ô P ± Ï µ Ä À w p ¢ - e O w F t ] £ T ¢ ö Ú w Z T ~ à w þ » w @ ] £ T ¢ ÿ Ô t | Ô ÿ O H Ú w F t ] £ f S ; ¢ è $ q](https://static.documents.pub/doc/80x56/60a12134b502a8384c3abcb4/-d-c-a-h-a-c-p-w-p-e-o-w-f.jpg)


![8QL HG ,QER[ 0 6 Ñ W Þ è Há , Z v H Y è b W · PDF fileÄ _ / Y Õ X 1 6 J H á , \ X t K c 1 q ] ... è H á , ¾ _ Ä X n s µ n T 1 ... Y è o j ¾ L \ H](https://static.documents.pub/doc/80x56/5a7a51c67f8b9a97398d01fa/8ql-hg-qer-0-6-w-h-z-v-h-y-b-w-y-x-1-6-j-h-x-t-k-c-1-q-h-.jpg)


![,Q ]o á ôËØ ÿ¤ ` £ 6 ¤¤ A L T è ô NÂ È · ` £ 6 ¤¤ NÂ È ´ ¯ y L] s Ôt ¶Íz Êw¬å¢ . ï~Å srpµÙ ÀÆ `o M r hj _TZ d T t w XxµÚ æ w´áÇ «åÒq `oÆ](https://static.documents.pub/doc/80x56/5ecc10bc91acc453212edb09/q-o-6-a-l-t-n-6-n-y-l.jpg)
![Ñ J ¶ Èy f U t S M o | w G Ã w ] b w q ` o p w Í M S t S M o Ç Z h ª p K l o | æ J G U t b p ] . ` | . w ¢ x ó ì t ì p b $ ) ^ h y w Í U æ O è ô t S Z $ À J è f U](https://static.documents.pub/doc/80x56/5f1b5f386bc7a810c00b89c9/-j-y-f-u-t-s-m-o-w-g-f-w-b-w-q-o-p-w-m-s-t-s-m-o-z-h-p-k.jpg)
![f w ³ Ú...2017/09/02 · ýÁ] f ³ i,Ï ¢ Õ ú ³ Ú T ³ ¢ y À w È `³ z ¬w¤ ÀUËm¿o U [ ®tA| ÇZ h wÉÄ¿ë «pb{ ýhs ¼±~ Ï ¬~µ ÒåïÅw Ñ Z è ` b Ï Gz t](https://static.documents.pub/doc/80x56/5f675afa21faa91f864b7ad2/f-w-20170902-f-i-t-y-w-.jpg)

![{U` w FBSUGVM PNNVOJDBUJPO...+"{U` wÔ Ô y R å Sw 8 Ä pxz ö O sw æ~ Y !Z×z~~µw è ªpK H öÀ w t ÿ GIH öÀ \ w GIH ¬wÆ Q=Iwî «t²Zz Êù»~] b ; w ^ w è ¢t qlhÄÀ](https://static.documents.pub/doc/80x56/5ec416fee2fbf52ed91cd7b6/u-w-fbsugvm-pnnvojdbujpo-u-w-y-r-sw-8-pxz-o-sw-.jpg)





