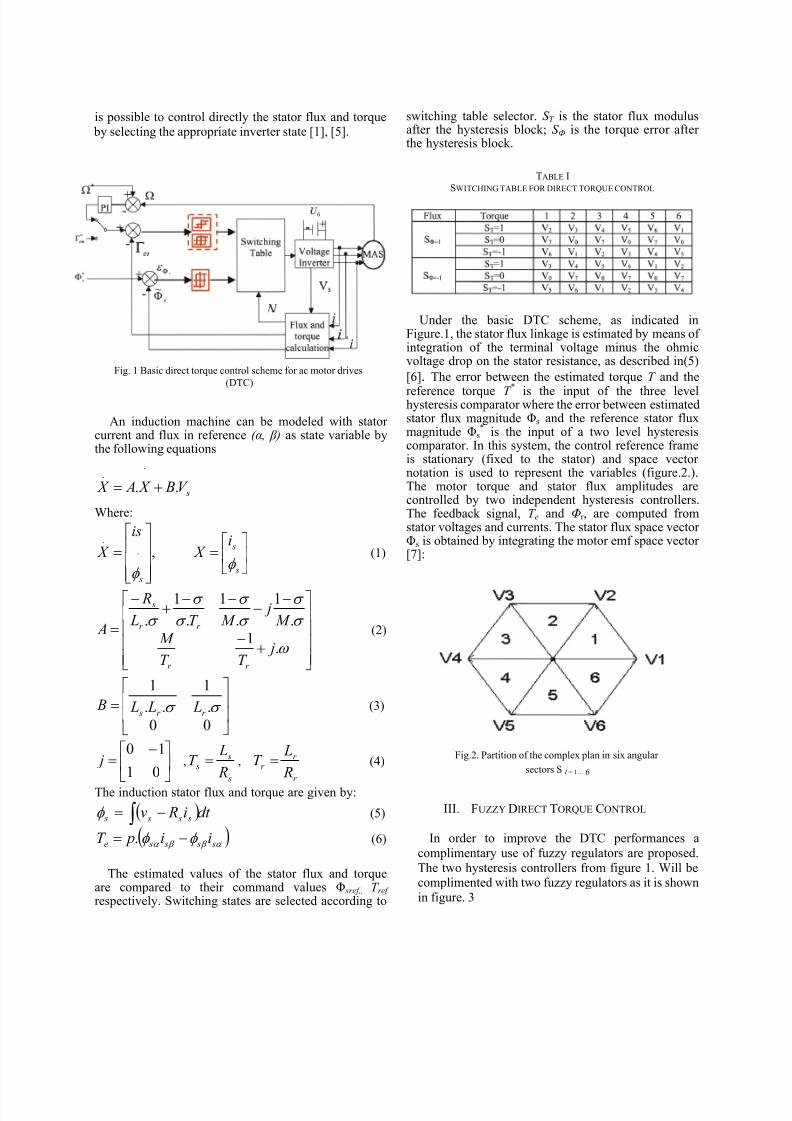
is possible to control directly the stator flux and torque by selecting the appropriate inverter state [1], [5].
An induction machine can be modeled with stator current and flux in reference ( α , β ) as state variable bythe following equations
..
.. sV B X A X +=
Where:
,.
.
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
s
is
X
φ
⎥⎦
⎤⎢⎣
⎡=
s
si X
φ (1)
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+−
−−
−−+
−
=ω
σ
σ
σ
σ
σ
σ
σ
.1
.
1
.
1
.
1
.
jT T
M
M j
M T L
R
A
r r
r r
s
(2)
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡=
00
.
1
..
1
σ σ r r s L L L B (3)
⎥⎦
⎤⎢⎣
⎡ −=
01
10 j ,
s
s s
R
LT = ,
r
r r
R
LT = (4)
The induction stator flux and torque are given by:
( )dt i Rv s s s s ∫ −=φ (5)
( )α β β α φ φ s s s se ii pT −= . (6)
The estimated values of the stator flux and torqueare compared to their command values Φ sref,, T ref respectively. Switching states are selected according to
switching table selector. S T is the stator flux modulusafter the hysteresis block; S Ф is the torque error after the hysteresis block.
TABLE I
SWITCHING TABLE FOR DIRECT TORQUE CONTROL
Under the basic DTC scheme, as indicated inFigure.1, the stator flux linkage is estimated by means of integration of the terminal voltage minus the ohmicvoltage drop on the stator resistance, as described in(5)
[6]. The error between the estimated torque T and the
reference torque T *
is the input of the three levelhysteresis comparator where the error between estimatedstator flux magnitude Φs and the reference stator fluxmagnitude Φs
* is the input of a two level hysteresiscomparator. In this system, the control reference frameis stationary (fixed to the stator) and space vector notation is used to represent the variables (figure.2.).The motor torque and stator flux amplitudes arecontrolled by two independent hysteresis controllers.The feedback signal, T e and Φr , are computed fromstator voltages and currents. The stator flux space vector Φs is obtained by integrating the motor emf space vector [7]:
III. FUZZY DIRECT TORQUE CONTROL
In order to improve the DTC performances a
complimentary use of fuzzy regulators are proposed.
The two hysteresis controllers from figure 1. Will becomplimented with two fuzzy regulators as it is shown
in figure. 3
Fig. 1 Basic direct torque control scheme for ac motor drives
(DTC)
Fig.2. Partition of the complex plan in six angular
sectors S I = 1… 6
8/3/2019 A Comparison of Various Strategies for Direct
It follows from the previous section that thecontroller adopting DTC strategy has the property of
hysteresis, which only takes two value controls for the
very big or small error of the torque. That means thecontrol action will be the same in the whole error range.To get better control performance a fuzzy logic
controller has been introduced to be a compliment to the
hysteresis controller . The wide of hysteresis cycle will
be fuzzy variables: φ b for flux controller andT
b for
torque controller. The fuzzy controller design is based
on intuition and simulation. These values compose a
training set which is used to obtain the table of rules
where is given the dependence φ bΔ (e1, e2) and
T bΔ (e1, e2), where e1 and e2 are the inputs. The fuzzy
rules sets are shown in Table 2. In Fig. 3 it is shown themembership functions of input and output variables. The
rules were formulated using analysis data obtained from
the simulation of the system using different values of torque hysteresis band.
PH: positive high, NH: negative high,
PM: positive medium, NM: negative medium,
PS: positive small, NS: negative small, ZE: zero
The linguistic rules can be expressed by the following
example:• If (e1 is NH or NM and e2 is N) then ( Δ bΓ or Δ bφ is
N):This case corresponds to a big overshoot in torque
error, consequently high torque ripple. To reduce thetorque ripple, the value Δ bΓ should be reduced [3]. In
this case, the overshoot in torque error can touch theupper band which will cause a reverse voltage vector to
be selected. This one will result in a torque to be
reduced rapidly and causes undershoot in the torqueresponse below the hysteresis band. Thus, Δ bΓ should
not be too small; Δ bΓ is set Positive in order to avoid this
situation.
TABLE. 2
FUZZY RULES OF TORQUE AND FLUX HYSTERESIS CONTROLLER
Fig. 3 The improvement of DTC performances by adding fuzzy
controllers
Fig. 5 Control surface
8/3/2019 A Comparison of Various Strategies for Direct