Autonomous Robots 4, 175–198 (1997) c 1997 Kluwer Academic Publishers. Manufactured in The Netherlands. Cooperation Protocols in Multi-Agent Robotic Systems FANG-CHANG LIN AND JANE YUNG-JEN HSU Department of Computer Science and Information Engineering, National Taiwan University, Taipei, Taiwan, R.O.C. [email protected][email protected]Abstract. Multi-agent robotic systems are useful in many practical applications. For some tasks, such as holding a conference, cooperation among agents are necessary. For other tasks, such as cleaning a room, multiple agents can work in parallel for better performance. This paper provides help-based (HCP) and coordination-based (CCP) protocols for controlling agents to accomplish multi-agent tasks. The HCP utilizes efficient negotiation to coordi- nate agents into groups. The CCP improves overall performance by exchanging local knowledge among agents and making decisions in parallel. A reactive and modularized agent architecture was employed to implement the proto- cols. Since each protocol is embedded into the architecture, it is efficient and effective. In addition, the protocols are deadlock-free. The protocols were utilized to solve the Object-Sorting Task, which abstracts two characteristics of tasks: parallelism and cooperation. The experimental results showed that 1) both HCP and CCP are stable under different workload; 2) the protocols can effectively utilize the agent-power to achieve super-linear improvement; 3) The CCP is better than the HCP in both performance and speedup. Keywords: multi-agent cooperation, deadlock handling, multirobot systems, multi-agent tasks, distributed auto- nomous robotic systems 1. Introduction Multi-agent systems employ multiple agents to solve problems. Nuclear power plants, space or undersea ex- ploration, and manufacturing systems are typical ap- plication domains. The advantages of a multi-agent system include cost, parallelism, fault-tolerance, and modularity. In particular, parallel performance and co- operation inside tasks are the main interests of the emerging multi-agent robotic systems. Some tasks can be executed in parallel for better performance. Tasks such as painting a wide wall or cleaning rooms can be partitioned into several parts, each of which is then assigned to an agent. If all agents work independently, i.e., no resource contention or goal conflicts, the performance is linearly speeded up. Otherwise, if there is resource contention (e.g., short of paintbrushes or brooms) or conflicts (e.g., agents have different favorite colors), the performance speedup will be sublinear. On the other hand, some other tasks re- quire explicit cooperation among the agents, e.g., con- ferences and moving a heavy equipment. In order to move a heavy equipment, a robotic agent must call for help and wait for the arrival of its partners, then they can start to move the equipment. For telecon- ferences, a couple of communication channels must be reserved and kept available for discussion among the attendants. In the information retrieval domain, a query may require many information servers to provide their information or knowledge. The query engine waits to collect all the information, then prepares the answer for users. All the situations explicitly require the coopera- tion among agents. The Object-Sorting Task described in the paper is an abstraction of these tasks. It consists of both parallelism and cooperation characteristics in which explicit cooperation is required to accomplish the task. There has been much research in multi-agent ro- botic systems. Hackwood and Beni’s research on swarm robotics demonstrated large scale cooperation
Abstract. Multi-agent robotic systems are useful in many practical applications. For some tasks, such as holdinga conference,cooperationamong agents are necessary. For other tasks, such as cleaning a room, multiple agentscan workin parallel for better performance. This paper provideshelp-based(HCP) andcoordination-based(CCP)protocols for controlling agents to accomplish multi-agent tasks. The HCP utilizes efficient negotiation to coordi-nate agents into groups. The CCP improves overall performance by exchanging local knowledge among agents andmaking decisions in parallel. A reactive and modularized agent architecture was employed to implement the proto-cols. Since each protocol is embedded into the architecture, it is efficient and effective. In addition, the protocolsare deadlock-free. The protocols were utilized to solve theObject-Sorting Task, which abstracts two characteristicsof tasks: parallelism and cooperation. The experimental results showed that 1) both HCP and CCP are stable underdifferent workload; 2) the protocols can effectively utilize the agent-power to achieve super-linear improvement;3) The CCP is better than the HCP in both performance and speedup.
Multi-agent systems employ multiple agents to solveproblems. Nuclear power plants, space or undersea ex-ploration, and manufacturing systems are typical ap-plication domains. The advantages of a multi-agentsystem include cost, parallelism, fault-tolerance, andmodularity. In particular, parallel performance and co-operation inside tasks are the main interests of theemerging multi-agent robotic systems.
Some tasks can be executed in parallel for betterperformance. Tasks such as painting a wide wall orcleaning rooms can be partitioned into several parts,each of which is then assigned to an agent. If all agentswork independently, i.e., no resource contention orgoal conflicts, the performance is linearly speeded up.Otherwise, if there is resource contention (e.g., short ofpaintbrushes or brooms) or conflicts (e.g., agents havedifferent favorite colors), the performance speedup willbe sublinear. On the other hand, some other tasks re-
quire explicit cooperation among the agents, e.g., con-ferences and moving a heavy equipment.
In order to move a heavy equipment, a robotic agentmust call for help and wait for the arrival of its partners,then they can start to move the equipment. For telecon-ferences, a couple of communication channels must bereserved and kept available for discussion among theattendants. In the information retrieval domain, a querymay require many information servers to provide theirinformation or knowledge. The query engine waits tocollect all the information, then prepares the answer forusers. All the situations explicitly require the coopera-tion among agents. TheObject-Sorting Taskdescribedin the paper is an abstraction of these tasks. It consistsof both parallelism and cooperation characteristics inwhich explicit cooperation is required to accomplishthe task.
There has been much research in multi-agent ro-botic systems. Hackwood and Beni’s research onswarm robotics demonstrated large scale cooperation
in simulation (Hackwood and Beni, 1992). Brookset al. (1990) developed the lunar base constructionrobots by using a set of reactive rules implementedon subsumption architecture (Brooks, 1986). By us-ing the schema-based architecture (Arkin, 1989), Arkin(1992) demonstrated that cooperation between roboticagents was possible even in the absence of communi-cation. It simplified the design of an agent becausethere was no communication between agents. On theother hand, it may be inefficient due to the lack ofcommunication. Arkin et al. (1992, 1993) assessed theimpact on performance of a society of robots in a forag-ing and retrieval task when simple communication wasintroduced.
Some researchers proposed mechanism to create thefoundation of multi-agent robotic systems. Fukuda’sCEBOT system (1989) showed the self-organizing be-havior of a group of heterogeneous robotic agents.Asama et al. (1989) proposed the ACTRESS archi-tecture for connecting equipment, robots, and com-puters together to compose autonomous multi-agentrobotic systems by designing underlining communica-tion architecture. Wang (1995) proposed several dis-tributed functional primitives on distributed roboticsystems.
Some other researchers worked on solving multi-agent tasks. Mataric (1992) addressed the problem ofdistributing a task over a collection of homogeneousmobile robots. Collective homing and flocking taskswere experimented. Balch and Arkin (1994) investi-gated the importance of communication in robotic so-ciety. They evaluated the performance of three genericmulti-agent tasks (forage, consume, and graze) un-der different types of communication. Alami et al.(1995) coordinated the multiple-robot navigation witha plan-merging paradigm for the task of transportingcontainers in harbors. All the mentioned tasks can beaccomplished with one agent alone. However, there aremany real world tasks that require explicit cooperationamong agents and cannot be achieved by any singleagent alone, such as moving a heavy equipment. Agahand Bekey (1995) studied the effects of communica-tion by simulated robot colonies on the fetch-and-carrytask in which an object may require one ortwo robotsfor movement. Their work addressed the communica-tion radius issue rather than cooperation issues suchas coordination and deadlocks. On the contrary, Linand Hsu (1995a) proposed a cooperation protocol withdeadlock-handling schemes for tasks that may requireany number of agents.
Since these tasks require cooperation and coordina-tion among agents, the achievement of tasks will beaccidental if agents work independently. Tasks cannotbe done unless agents cooperate and coordinate theirbehaviors. Therefore, it is necessary to have a cooper-ation protocol that allows multiple agents to help eachother in the problem solving process.
To solve a multi-agent task, either centralized ordistributed approaches can be employed. A central-ized model uses a powerful agent to plan and sched-ule the subtasks for every agent. This control agenthas global knowledge concerning the environment andthe problems. It can deliberately plan for better perfor-mance, e.g., optimal solutions. However, for tasks withNP complexity, the centralized approach is impracti-cal. Furthermore, the control agent must be powerfulenough to achieve satisfactory performance. High de-sign complexity, high cost and low reliability are theother drawbacks of centralized approach.
On the other hand, a distributed approach decreasesdesign complexity and cost, while increasing the reli-ability. Agents are autonomous and equal. An agentplans for itself and communicates with the others inorder to accomplish the global task. Since every agentinteracts directly with the environment, it is reactive.However, each agent has only local knowledge of thetask and the environment. Hence, it cannot make thebest decision of the global task alone. Furthermore, ne-gotiation and social cooperation rules for conflict res-olution are required to coordinate among them.
One distributed approach is to let each agent workalone. Whenever an agent cannot achieve its goal byitself, it requests help from the others. Moreover, everyagent always offers help when it can. This ishelp-basedcooperation. It is simple and effective in achieving theoverall task. Its problems include: too many helpersfor an agent is a waste; too many agents requiring helpwill cause a deadlock; some agents obtain help moreoften than the other agents (unbalanced load) ; and localknowledge limits the system performance.
Another approach is to let agents work together. Fora given task, agents coordinate a global plan for per-forming the task by exchanging their local knowledge.It is coordination-based cooperation. With enough in-formation, a task can be optimally achieved. Moreover,each agent can optimize its decisions. The problemsof this approach include overhead due to coordina-tion, complexity in choosing optimal decisions, andthe amount of storage for saving the exchanged infor-mation.
In this paper, two distributed approaches, thehelp-based cooperation protocol(HCP) and thecoordi-nation-based cooperation protocol(CCP), were uti-lized to solve multi-agent tasks with a modularizedand reactive agent architecture. TheObject-SortingTask(OST) was applied to demonstrate the approaches.Section 2 introduces and discusses the OST. The agentarchitecture for implementing the protocols is pre-sented in Section 3. The HCP, CCP, associated dead-lock handling, and implementation are described inSections 4 through 6. Finally, simulation and exper-imental results are shown in Section 7. In addition,Section 8 provides several issues for implementing theproposed protocols to real robots.
2. The Object-Sorting Task (OST)
The Object-Sorting Task provides an abstraction modelfor the type of tasks which consist of both parallelismand cooperation characteristics in which explicit coop-eration is required to accomplish the task. The OSTwas showed to be a NP-complete problem for findingthe optimal performance (Lin and Hsu, 1995b). Thissection presents its definition, search complexity, andproblem analysis.
2.1. Definition
Let O = {o1, . . . ,oM} be a set of stationary objectsthat are randomly distributed in a bounded area. Everyobject, oi = (l i , di , ni ), is associated with an initiallocationl i , a destination locationdi , and the numberni
of agents for movement. An objectoi can be movedonly if there are at leastni agents available to move it.An object is a large object ifni > 1, or it is a smallobject if ni = 1. Let R = {r1, . . . , r N} be the set ofagents andnmax be the maximal number of agents tomove any single object, an object-sorting task can becompleted only ifN is not less thannmax. Agents searchfor objects and move them to their destinations. Whenall the objects have been moved to their destinations,the task is finished.
Typical application examples of OST are foragingand retrieval, explosives detection and handling, AGVdispatching for components transportation in FMS, andsurveillance, etc.
There are many models associated with differentstrategies to do the task, e.g., any object is assignedto agents at random, the movement of objects are con-
trolled by a predefined precedence, and the action ofagents are all central-controlled, etc. No matter whatoperational model and strategies are arranged, its so-lution can be represented by the sequence of objectsmoved by each agent. This sequence is calledAgent-Object Sequence(AOS). For each agentri , let si j ∈ Orepresent thej th object moved byri (and its partners).An AOS is represented by the form:
r1 : s11s12 · · · s1k1
r2 : s21s22 · · · s2k2
· · ·r N : sN1sN2 · · · sNkN
For example, the number of objects thatr1 involvedto move isk1 and the sequence iss11s12 · · · s1k1. LetI (si j ) be the initial location ofsi j , and D(si j ) be thedestination ofsi j . The cost ofsi j is defined as
ci j = ai j + wi j +mi j
where
ai j : the cost ofri moving from I (ri ) to I (si 1) whenj = 1, or the cost ofri moving from D(si ( j−1))
to I (si j ) when 1< j ≤ ki .wi j : the cost ofri after reachingI (si j ) and waiting for
enough agents to movesi j .mi j : the cost ofri movingsi j from I (si j ) to D(si j ).
All ai j , wi j , andmi j are defined by its model, e.g., amodel may use distance to define them. Letfi be thecost ofri moving from D(siki ) to I (ri ), i.e., return toits initial location. The cost of agentri is defined as
CRi =(∑
j
ci j
)+ fi
For example,CR1 is the cost ofr1 spent on itsk1
objects and returning to its initial location. Obviously,the maximumCRi (1≤ i ≤ N) is the maximum cost toachieve the AOS. Hence, the cost of the AOS is definedas
Cost= MaxCRi , 1≤ i ≤ N
Generally speaking, an agent searches for objects, co-ordinates with the other agents for handling objects,and cooperates to move objects. The cost of an appliedmodel is the maximum cost among all the agent costs.
Table 1. The order of search space forN = 10 agents.
M 10 20 30 40 50 100
Order 1026 1058 1092 10128 10164 10358
2.2. Search Complexity
Finding an optimal solution of OST is an NP-completeproblem. The search space can be depicted from thesearch process of AlgorithmOptimal-OST. It lists allobject sequences, then assign agents to the objects foreach sequence. There areM ! object sequences fromM objects, andC(N, ni ) assignments for each ob-jectoi , whereC(k, r ) is the number ofr -combinationsfrom k. Hence, the search space isM !(
∑C(N, ni )),
1 ≤ i ≤ M . Let E(C(N, i )) be the mean ofC(N, i ), 1 ≤ i ≤ N. The search space becomesM !(E(C(N, i )))M . Table 1 lists the order of searchspaces for different number of objects whenN = 10agents.
Algorithm. Optimal-OST.
1. FOR each permutation of objectso1, . . . ,oM DO
(1) Let the object sequence bes1, . . . , sM .(2) FOR eachsi = (l i , di , ni ) in s1, . . . , sM DO
a) Let C(r ) represent all ther -combinationsfrom the agent set{r1, . . . , r N}.
b) FOR each combination ofC(ni ) DOAssign the agents to the objectsi .
(3) Compute the cost ofs1, . . . , sM .
2. The optimal solution is the object sequence com-bined with the assigned agent, which has minimalcost.
2.3. Assumptions
The system assumptions are the following:
1. Agents are homogeneous mobile robots.2. Agents have no prior knowledge about the environ-
ment. They know the environment around them onlyafter they have detected it.
3. Agents are cooperative.4. Agents can communicate through reliable broadcast
or point-to-point channel.5. Every agent is autonomous and has the basic capa-
bilities:
• object recognition. It can identify the otheragents, the obstacles, and the target objects.• navigation and obstacle avoidance. It can move
from one location to a specified location.• object handling. It can move an object alone or
with the other agents.
2.4. Problems
To solve the OST, several problems need to be ad-dressed.
1. Search. All the objects must be found in order toachieve the task. The most intuitive way is to letagents search the entire area so that they can find allthe objects. How do they search efficiently?
2. Coordination.How do agents coordinate each otherfor assigning themselves to any found object? Thatis, for a given object, which agents should worktogether to move it? and who makes the decision?
3. Deadlocks.When each agent autonomously selectsan object and none of the selected object has enoughagents for movement, a deadlock occurs. A coordi-nation solution must solve the problem.
4. Load balance.How is all the load of the task dis-tributed to agents? If some agents are busying insearch or handling objects while other agents areidle, the performance will be poor. More load bal-ance stands for better performance.
5. Cost balance.The smaller the maximum cost ofthe agents is, the better performance is. Intuitively,more balanced cost may reduce the maximum costof the agents.
6. Termination. How do every agent realize that theglobal task has been accomplished?
The OST consists of two subtasks:searchfor objectsand objectmovement. Moreover, the OST includes twotypes of task characteristics: parallelism and coopera-tion. Thesearchsubtask can be easily paralleled. Letthe entire area be equally partitioned intoN subar-eas, then each subarea is assigned to one agent. Themovementsubtask also can be paralleled if multipleagents can move multiple objects simultaneously. Ob-viously, This is a cooperation problem because agentsmust coordinate themselves to control the parallel per-formance. Another characteristic is cooperation: anobject may require several agents for its movement.Hence, it is necessary to have cooperation protocolsthat allow multiple agents to help each other in theproblem solving process.
Many protocols can be utilized for the OST. Oneeffective and reactive protocol is thehelp-basedproto-col. In this model, every agent searches the objects inits subarea. When an agent finds a large object, it callsfor the other agents’ help. Then, it selects its partnersfrom the agent willing to offer help. After the arrivalof its partners, they start to move the object.
Another improved protocol is thecoordination-basedprotocol which lets an agent broadcast the objectdata when it finds an object. After having searched theentire area, agents coordinate to plan anagent-objectsequencefor object movement. This model stores ob-ject data for obtaining better performance through coor-dinating overall object movement. Although responseof object movement may be slower, the global perfor-mance is better than the help-based protocol.
All the proposed protocols are designed and imple-mented on the agent architecture described in the nextsection.
3. Agent Architecture
At the bottom of the agent architecture, each agent hasthe basic behaviors such as navigation, object handling,etc. Based on the behaviors, the architecture presentedin the section focus on functionality. The overall func-tion of each agent is controlled by cooperation proto-cols which are realized by finite state automata (FSA).Furthermore, the global FSA is distributed into sev-eral functional modules which perform subsets of theglobal FSA simultaneously.
For the OST, the system architecture of each agentis shown in Fig. 1. Thesearch module, communica-tion (comm.) module and motion moduleare all finite
Figure 1. The architecture of each agent.
state automata coordinated through a global state. Theyshare and change the state information according totheir state functions. Thesearch modulesearches forobjects, identifies their destinations and required num-ber of agents. Themotion moduleperforms the functionof object movement alone or with other agents. Thecommunication modulecommunicates with the otheragents in order to cooperate with them.
Advantages of the architecture are described in thefollowing:
• Simplicity. The global FSA is very complex. Com-pared with a central module controlling all the statetransition, the architecture is more simple, clear andfast for implementation.• Reactivity. Agents react and cooperate quickly be-
cause cooperation protocols are realized into statetransition functions and each module handles only asubset of the global FSA.• Intra-agent Distributed Control.Functional separa-
tion for each agent makes the intra-agent distributedcontrol. All state transitions are distributed into themodules and a single transition is done only by onemodule. The modules can run concurrently or simul-taneously based on multiprocessor or uniprocessorplatform. The communication between modules isthrough the shared global state information.• No fixed Inter-agent Control.Agents communicate
with each other only through the communicationsystem. The inter-agent control can be designedfor different kinds of purpose. Depending on ap-plications, it may be central control or distributedcontrol.• Flexibility. It is ease to add a new functional mod-
ule to the agent architecture. Additional functionscan be performed by the agents if the correspondingmodules are included in the architecture.
4. Help-Based Cooperation Protocol (HCP)
The HCP defines how and when an agent requests help,how and when the other agents offer help, as well asdeadlock handling, in order to coordinate the agents foraccomplishing the task.
The working area is partitioned into disjointN sub-areas, and each subarea is assigned to an agent. Eachagent exhaustively searches its subarea. It requests helponce it finds a large object, then selects its partners fromthe agent willing to offer help. After there are enoughagents arriving at the found object, they carry the object
to its destination. Since each agent is independent andautonomous, simultaneous selection of partners by sev-eral agents may cause a deadlock. Several schemes areutilized to handle deadlocks.
The global state diagram representing the HCP isshowed in Fig. 2, and the state diagrams of each mod-ule are showed in Fig. 3. Each circle is a state and
a thread represents the state transition driven by theevent on the thread. The I-states in the figures are uti-lized to distinguish the agents having finished their sub-tasks from the agents not having finished their subtasks.For example, an agent is inRETURNINGstate or inI-RETURNINGstate after it has helped out. The agentwill be in SEARCHINGafterRETURNINGstate while
it will be in IDLE state afterI-RETURNINGstate whenit reaches its destination.
4.1. Cooperation Strategies
An overview of the HCP is described with the followingcooperation strategies:
1) Request-helpstrategy. An agent broadcasts ahelpmessage when it finds a large object. It is called arequiring-help agent.
2) When-helpstrategy. The strategy determines whento offer help. An agent accepts ahelpmessage onlywhen it is in SEARCHING, (I-)RETURNINGorIDLE states (whose states will be described in nextsubsection). Otherwise the message is queued forlater processing.
3) Select-helpstrategy. It enables an agent to decidewhich agent has the most urgent need for help whenthere are many agents requiring help. An agent se-lects the nearest to offer help. That is, select theagent with minimum approaching cost. An agentthat responds to ahelpmessage is called a will-helpagent.
4) Select-partnerstrategy. A requiring-help agentr i
must choose suitable partners if there are more will-help agents. The selected partners are called help-ing agents, andri is called helped agent. An agentchooses the nearest will-help agents as its partners,i.e., the agents with minimum approaching cost.
5) Load-balancingstrategy. It is considered in twoparts. One part is to uniformly distribute agentsinto equal-partitioned area. Another part is embed-ded in theselect-partnerstrategy. When an agentneeds help fromn agents, there may bem will-helpagents such thatm is greater thann. The load-balancingstrategy enables the agent to select thefirst n nearest agents, who will receive anacceptmessage. The other will-help agents will be rejectedby rejectmessages.
6) Deadlock-freestrategy. Deadlocks are the situa-tion that all the agents are inWAITINGstate orI-WAITINGstate. First, the agents in(I-)WAITINGstate detect the deadlocked situation (which will bediscussed in detail in Section 5), then they broadcastblockedmessages to exchange their state informa-tion and break down the blocked situation by com-paring their priorities. The lower priority agents willenter(I-)HELPINGstate and go to help the highestpriority agent.
4.2. Search Module
The search module searches for the objects and iden-tifies their destinations in theSEARCHINGstate. Itchanges the state toMOVING if the object is small,or to WAITINGand broadcasts ahelp message if theobject is large.
Since agents are independent, they don’t know inwhich situation the others are. When an agent has com-pletely searched its subarea, it does not mean the systemtask is done. It is necessary to have a protocol to letagents know when the task is done. When an agentrhas accomplished its subarea, it broadcasts asub-finmessage and comes intoSub-FINISHstate. Any otheragent whose subtask is not yet finished will reply abusymessage to the agentr . If r receives abusymessage,it enters intoIDLE state. Otherwise, it means all thesubtasks are finished andr will broadcast anall-finishmessage. All the agents inIDLE come intoFINISHstate after receiving thefinishmessage, i.e., the systemtask is finished.
4.3. Motion Module
Agents inMOVING state is moving an object to itsdestination, and will change the state toRETURNINGafter having moved the object to its destination. Whenin RETURNINGstate, an agent is returning to its sub-area and the motion module will change the state toSEARCHINGafter arrival. An agent inHELPINGstateis walking toward ahelped agent, and will change thestate toWAITINGwhen arrival. If there are enoughagents for carrying the object, the agents inWAITINGwill change the state toMOVING.
After an agent has finished its subtask, it entersIDLEstate and returns to its base location. The agent will bein I-HELPING when it is moving to ahelped agent,and will change the state toI-WAITINGwhen arrival.If there are enough agents to move the objects, theagents inI-WAITING state will change the state toI-MOVING. When it has moved the object to the desti-nation, the agent comes intoI-RETURNING, then thestate is changed toIDLE when it has returned to itsbase location.
4.4. Communication Module
When receiving ahelpmessage inSEARCHINGorRE-TURNINGstates, the communication module replies a
will-help message and changes its state toS-REPLYorR-REPLY. If the requiring-help agent accepts thewill-helpmessage, it sends back anacceptmessage to theagent, otherwise, it sends arejectmessage to reject thehelp. When receiving anacceptmessage, the commu-nication module changes the state toHELPING. Whenreceiving arejectmessage, the communication modulereturns to its previous state.
An agent inIDLE state stays in its base location andwaits forhelpmessage in order to help the others. Themechanism is the same as described above.
5. Deadlock-Handling Schemes
Here is a deadlock situation using the HCP. There are 4agentsR = {r1, r2, r3, r4} and two objectso1, o2 withn1 = n2 = 3. If r1 finds objecto1 andr2 finds ob-ject o2 at the same time,r3 and r4 will receive helpmessage from bothr1 andr2. If r3 chooses to helpr1
andr4 chooses to helpr2 according to theselect-helpstrategy, all the agents will enter theWAITINGstate.A deadlock occurs. We say{o1, o2} causes the systemcoming into a deadlock. Here is a fact coming fromthe strategies used.
Fact 1. If a set of objects will cause the system com-ing into a deadlock, they are large objects and found atthe same time.
Explanation: Assume there is a set of objectsK ={oi | oi ∈ O, ri ∈ R, oi was found byri at timeti } suchthat the system comes into a deadlock. Since a smallobject requires only a single agent to move, it will notcause a deadlock. Sooi is a large object ifoi ∈ K . Foranyoi , oj ∈ K , i 6= j ,
Case 1: ti < t j . Sincer j was inSEARCHINGbeforet j according to the state diagram,r j must have beena will-help agent tori and rejected byri accordingto thewhen-helpstrategy and the state diagram. Sori had enough partners to moveoi . The result is thatoi should not be inL. So this case is impossible.
Case 2: ti > t j . Similar to Case 1, it is impossible also.
Soti = t j . That is, the large objects causing systemblocked are found at the same time.
Since the small objects will not cause a deadlock, we fo-cus on the large objects. LetLt = {oi | oi ∈ O, r j ∈ R,s.t.,oi was found byr j at time t}, |Lt | = k, be a setof large objects, andrt (oi ) denote the agentr j suchthat oi ∈ Lt andoi was found byr j at time t . Gt =
{rt (oi ) | oi ∈ Lt }. Rememberoi = (l i , di , ni ), andni
is the required number of agent to moveoi . Let Ft ={r | r ∈ R, r 6∈ Gt } be the set of agents which don’tfind large object at timet . Since the objects causing adeadlock must be found simultaneously, the followingdiscussion uses a fixedt . Lt is referred to asL , rt (oi ) isreferred to asr (oi ), andGt is referred to asG. We as-sumeN ≥ nmax. If k = 1, the other agents can help theagent inG and the system will not come into a deadlock.So a deadlock may occur ifk > 1. It is obvious that adeadlock will occur if for alloi ∈ Lt , ni > |F | + 1.
There are three approaches for handling deadlocks:deadlock prevention, deadlock avoidance, and dead-lock detection. Which deadlock-handling approach issuitable greatly depends on the application. Based onthe strategies provided in previous section and a lit-tle modification, we propose three schemes to handledeadlocks for the object-sorting task.
5.1. Deadlock Detection
In what follows, we will present the analysis for anyagent in(I-)WAITINGstate to detect the deadlock situ-ation. Lemma 1 shows that a deadlock can be detectedby checking the number of objects causing agents tostay in the(I-)WAITING states if global knowledgeabout the agent state is available. In a distributed en-vironment, Theorem 1 allows each agent to identify adeadlock based only on local information.
Let MTT be themaximum travel timebetween anytwo locations in the bounded area, andWt,u = {o | o∈ Lt , some agent is inWAITINGor I-WAITINGstateat timet +u due too}, soWt,0 = Lt ·Wt,u is referred toasWu in the following discussion.
Lemma 1. Given|Wu| > 0, the system is deadlockediff
|Wu+2MTT| = |Wu|.(That is, the system is not deadlocked iff
|Wu+2MTT| < |Wu|.)
Proof: The “only if” part is trivial and obvious. Nextwe consider the if part: given|Wu+2MT T| = |Wu|. Theagents are partitioned into the following sets accordingto their current states, except theFINISH state whichmeans that the task has been finished:
AVAIL = {r ∈ R, r ’sstate isSEARCHINGorRETURNINGor I -RETURNINGor IDLE}
TEMP= {r ∈ R, r ’sstate isS-REPLYor R-REPLYorI-REPLYor SUB-FINISH}
Each state in TEMP is a transit state and can be ignored.Given |Wu| > 0, i.e., WAIT set is not empty, if thesystem was not deadlocked at timet + u, the agentsin AVAIL can offer help immediately and the agentsin MOVE or HELP may offer help in the future. Ifthey can help to move an object at timet +u+ v otherthan enter WAIT, then|Wu+v| < |Wu|. We considerthe case in each set starting from the timet + u:
1) HELP set: When an agent in HELP set reaches theobject, either it enters MOVE set if there are enoughagents to move the object or enters WAIT set. Ob-viously, an agent stays in HELP state no more thanoneMTT. So the maximum time for these agents toreach and move an object inWu is oneMTT.
2) AVAIL set: Every agent in the set is a will-helpagent. If the agents in AVAIL are accepted by therequiring-help agents, they enter HELP set. So themaximum time for these agents to reach and movean object inWu is aMTT.
3) MOVE set: The time that an agent stays in MOVEand enters AVAIL set is no more than oneMTT. Af-ter that, the agent enters HELP set immediately ifthere is requiring-help agent. So the maximum timefor these agents to reach and move an object inWu
is 2MTT.
So the maximum time for the agents not in WAIT toreach and move an object inWu is 2MTT. On theother hand, they all enter the WAIT set if they cannotmove any object inWu in 2MTT. That is, the system isdeadlocked if|Wu+2MT T| = |Wu|. 2
Theorem 1. For object-sorting tasks, a deadlock isthat all agents keep staying in WAITING or I-WAITINGstates. Let MTT be themaximum travel timebe-tween any two locations in the bounded area. Whenany agent stays in WAITING state or I-WAITING statefor 2(N− 1) MTT, the system is deadlocked.
Proof: The system is deadlocked if all the agents findlarge objects at the same time, i.e.,|W0| = N. If it isnot the case, i.e.,|W0| < N. From Lemma 1, the sys-tem is not deadlocked att + 2MTT if |W2MTT| < |W0|.In the worst case:|W0| = N − 1, |W2(N−1)MTT| = 0 ifthe system is not deadlocked att + 2(N − 1)MTT.That is, all the objects inL have been moved, andthere is no agent inWAITINGor I-WAITINGdue to theobjects.
So if an agent stays inWAITINGstate orI-WAITINGstate for 2(N−1)MTT, all the agents must be in eitherWAITINGstate orI-WAITINGstate and the system isdeadlocked. 2
This scheme is very simple and effective. How-ever, it may be inefficient because the deadlock detec-tion time is proportional to the number of agents. Thesystem performance will degrade when the number ofagents increases. To avoid unnecessary waiting, let anagentr broadcasts anis-blockedmessage every 2MTTwhen staying in(I-)WAITING, and the other agents notin (I-)WAITINGreply with not-blockedmessage. Ifrreceives anynot-blocked, it keeps waiting, otherwise,it has detected a deadlock situation. This improvementcan detect a deadlock quickly once a deadlock occurs.Nevertheless, it introduces redundant message trans-mission.
5.2. Object Priority
This scheme prevents deadlocks by the following parts:
• It assigns a unique priority to each object.• Select-helpstrategy is modified. An agent selects
the agent having found the highest priority object.• Select-partnerstrategy is modified. An agent selects
its partners by first considering their states are not in(I-)WAITING, then shorter distance.• When-helpstrategy is modified. An agent in(I-)
WAITINGstate also can offer help if it is not the agenthaving found the object with the highest priority.
An object has a higher priority if it is nearer to itsdestination. In our two-dimensional experimental en-vironment, for example, the priority of an object isdetermined by comparing the following order:
1. the distance between the object and its destination,2. x-coordinate of the object,3. y-coordinate of the object.
Since there is no more than one object having the same(x, y) coordinates, different object has different pri-ority. The scheme guarantees that the selection ofa requiring-help agent to offer help will not cause adeadlock when an agent is available to offer help. Themodifiedwhen-helpstrategy is for the situation whenni > |F | + 1 for all oi ∈ L.
This scheme is very simple and easy for implementa-tion. Nevertheless, many redundant messages are trans-ferred for replying to thehelp coming from higherpriority agents, or rejecting the will-help agents whichare more than required.
5.3. Feasible Sequence
This scheme utilizes the concept offeasible sequenceand associated algorithms in order to guarantee that se-lecting an agent to offer help doesn’t cause a deadlock.Meanwhile, it has additional advantages:
• It eliminates the redundant messages transferred.• It is load-balancing.• It can improve the system performance.
Definition: Feasible sequence.A feasible sequenceis a permutation sequences1, . . . , si , . . . , sk of L , si ∈L , 1 ≤ i ≤ k, such thats1 is moved to its destinationby the agents inF andr (s1), thens2 is moved to itsdestination by the agents inF, r (s1), andr (s2), . . ., andfinally sk is moved to its destination by all agents.
For example, assumingR = {r1, r2, r3, r4}, L ={o1, o2},G = {r1, r2}, n1 = 3, n2 = 2, a feasible se-quence may beo1, o2 or o2, o1. If n1 = 3, n2 = 4, thefeasible sequence iso1, o2 only.
Theorem 2. For object-sorting tasks, a deadlock isthat all agents keep staying in WAITING or I-WAITINGstates. Let L be the set of objects found at the sametime. Any deadlock which may be caused by L can beavoided if there is a feasible sequence in L.
Proof: Fact 1 states thatL may cause a deadlock.However, there is a feasible sequence inL. Assumes1, . . . , sk is the feasible sequence, we can lets1 bemoved to its destination first, thens2, . . . , and letsk
be moved to its destination at last. Since all the ele-ments inL are moved to their destinations, the deadlockwhich may be caused byL has been avoided. 2
If there is a feasible sequence inL, the agents canmoved these objects according to the sequence. Fur-thermore, they can distribute themselves to differentobjects such that more than one object can be movedsimultaneous and increase the performance. It is im-plemented in Algorithmload-balancing.
If there is no feasible sequence inL, the select-help strategy must be modified to avoid coming intoa deadlock. In addition, the agents inG may needto exit WAITINGstate to help each other. For exam-ple, assumeR = {r1, r2, r3, r4}, L = {o1, o2},G ={r1, r2}, r (o1) = r1, r (o2) = r2, n1 = 4, n2 = 4, andthe sorted sequence ofL is o1, o2. Though there isno feasible sequence, bothr3 and r4 can selectr1 asthe helped agent. Besides,r2 must exitWAITINGstateand go to helpr1 to avoid a deadlock. Aftero1 havingbeen moved to its destination, the agents can continueto moveo2. In order to implement the scheme, theselect-helpstrategy is modified to the following:
Step 1.If k = 1, the agent inG is the selected agent.Otherwise, continue the next step.
Step 2.Use algorithmfind-feasible-sequenceto checkif there exist a feasible sequence inL.
Step 3. If there is a feasible sequence inL, use al-gorithm load-balancingto select the helped agent.Otherwise, select the agent according to the orderof the sequences1, . . . , sk sorted in algorithmfind-feasible-sequence. That is, if will-help r(s1) is re-jected, tryr (s2), etc.
Let I (oi ) = i be an index function foroi ∈ L.Algorithm find-feasible-sequencewill find a feasiblesequence inL if there is a feasible sequence inL.
Algorithm. Find-feasible-sequence.
Step 1. Sort L by keysni and agent priority to ansequences1, . . . , sk. First sort by keyni with non-decreasing order. Ifni = nj , compare the agentpriorities ofr (oi ) andr (oj ) to determine their order.
Step 2. C= N − k.FOR 1≤ i ≤ k DO
j = I (si );IF C + 1≥ nj THEN
C = C + 1.ELSE
marksi+1, . . . , sk as the unsatisfied sequence,the result is no feasible sequence,exit.
Step 3.The sequences1, . . . , sk is a feasible sequence.
Step 1.Initialize the current number of agent,Ci , forall oi ∈ L to 1.
Step 2. j= 1.FOR 1≤ i ≤ N DO
IF ri ∈ F THENl = I (sj );IF Cl < nl THEN
IF i is equal to my id. THENrl is the selected agent, exit.
ELSECl = Cl + 1;IF Cl = nl THEN
j = j + 1.
The agents inF also need some modification for theirbehavior when they stay in(I-)WAITINGstate. If thereis a feasible sequence, they can stay(I-)WAITINGstateand wait for help. While there is no feasible sequence,the agents inG must exit(I-)WAITINGstate to helpeach other in order to avoid a deadlock.
Step 1.Use algorithmfind-feasible-sequenceto checkif there is a feasible sequence inL.
Step 2. If there is no feasible sequence inL, and theobject found by itself is in the marked unsatisfiedobjectssi+1, . . . , sk, select the helped agent accord-ing to the order of the sequencesi+1, . . . , sk. Thatis, if will-help r(si+1) is rejected, try next one in thesequence, etc.
The sorted sequence is kept by all agents and is referredwhen they can help the others till all objects inL aremoved.
6. Coordination-based CooperationProtocol (CCP)
The HCP utilized simultaneous subarea search for par-allel performance, and cooperation protocol for solvingthe coordination, deadlocks, and termination problems.The protocol is realized into each agent’s state tran-sition function so that agents reacted and cooperatedquickly. Nevertheless, the performance of OST can befurther improved.
One characteristic, mentioned in Section 2.4, of theOST isparallel movementof objects. In HCP, an ob-ject is processed immediately once it is found, which
limited the global knowledge of agents. Hence, the de-gree of parallel movement depends on the dynamics ofenvironment. That is, agents cannot make cost-optimaldecisions. The CCP has been developed to address thisissue.
Like HCP, the CCP uses equal partition of the work-ing area for parallel search. However, instead of re-questing help once an object is found, every objectinformation is broadcast and saved when received.With the overall object information, each agent makesits optimal decision and negotiates with the others for aglobalagent-object sequence(AOS) which defines ev-ery agent’sobject sequence. Then, each agent movesobjects according to its object sequence. In order toefficiently resolve conflicts, social rules are employedinto acoordination algorithmfrom which decisions areobtained by each agent independently so as to minimizenegotiation overhead.
6.1. Coordination Points
A coordination point specifies the time when agentsshould start coordinating the AOS for the found objects.The simplest way is to start acoordination processafterhaving searched the entire area. Since the CCP requiresevery agent to save the information of found objects,the storage demand will expand with the increasingnumber of objects.
However, coordination can start during subareasearch under storage constraints or in order to reducestorage demand. Several events can be utilized to ac-tivate a coordination process, such as having found acertain number of objects, a part of area searched, ora fixed time interval if there is a common clock. Thefrequency of coordination is specified by thecoordina-tion interval(CI), e.g., coordination is activated every100 time units (CI= 100) or every 20 objects found(CI= 20). The unit of CI employed in the paper is acertain number of objects found, since it is more naturalto the OST.
Since it is possible that more than one object arefound at the same time, the actual number of objectsfound may be more than the CI when a coordina-tion process begins. Agents must have the same objectset for each coordination process. Under such circum-stance, either the exactly CI number of higher priorityobjects or all found objects attend the current coordi-nation process. Object ID can help to determine theobject priority.
In order to clearly identify objects during coordina-tion, a consistent representation of objects is necessary.Generally, assigning a unique ID for each object isappropriate. However, various assignment methodsshould be suitably applied under different situations.Several methods are discussed:
1) Predefined attributes: Object IDs are predefinedso that it can be identified by agents. An objectcan be identified from its outside look, size, sym-bol, or initial location. For example, a two dimen-sional coordinate can determine the order of objectIDs by comparingx-coordinate theny-coordinate inorder.
2) Coordinator: Where there is no way to specify apredefined object ID, this method can be applied.Every object found is reported to the coordina-tor, then the coordinator broadcasts the ID to theothers.
3) Other more complicated distributed algorithms(e.g., Lamport, 1986; Wang, 1993) concerning theorder of discrete events may be employed when thecoordinator method is unsuitable.
6.3. Coordination Algorithm
The OST is a NP-complete problem, thus there is nopolynomial time algorithm for overall optimal AOS.The utilized coordination strategy is based on balancedcost and greediness. AlgorithmCoordinationdepictsit. All agents invoke this algorithm to coordinate theirindividual object sequence.
At first, every agent selects a local cost-optimal ob-ject and broadcasts its selection. Among the selectedobjects, the best cost-optimal object is scheduled, i.e.,enough agents are assigned to it. Finally, every assignedagent updates its cost and location. The process is re-peated until all objects are scheduled.
Algorithm. Coordination
1. Every agent selects its current cost-optimal object,and broadcasts to the others. Let the selected objectsbes1, . . . , sk, 1≤ k ≤ N.
2. Select the best cost-optimal object,Opt, among theselected objects.
(1) FOR each object ins1 · · · sk DO
• Let the current object beoi = (l i , di , ni ).• FOR each agentr j DO
Let C Aj be the accumulated cost ofr j ,andC Rj be the cost ofr j to reachoi .
Ci j = C Aj + C Rj
• Mi = the ni th smallest cost fromCi 1,
Ci 2, . . . ,Ci N
(2) Opt= the object with minimumMi
3. Assign agents toOpt, and update data.Let Optbeop = (l p, dp, np).Assigned agents are thenp agents with smaller cost
Cpi, 1≤ i ≤ N.IF I am one of the assigned agents THEN
(1) appendOpt to my object schedule;(2) accumulate my cost with (Mp+ the cost froml
to d);(3) my location= d.
4. Repeat from Step 1 until all object has been sche-duled.
Obviously, this approach is cost balance because selec-tion strategy is to choose the agents with smaller cost.Besides, it is deadlock-free from the two facts: thereis a consistent object order in every agent’s object se-quence and there are enough agents assigned to everyobject.
Since every agent selects one object for coordina-tion at a time, the number of selected objects is at mostN. For each selected object, it requires time complex-ity O(N) to calculate all costs of agents. So, the costfor scheduling an object isO(N2). Since there areMobjects, the complexity of algorithmCoordinationisO(M N2).
There are several differences between the HCP andCCP.
1. Task partition: The HCP partitions objects and as-sign each part to an agent while the CCP partitionsthesearchtask only.
2. Object assignment: An object is assigned to whichagents is determined by cooperation strategies inHCP while by coordination strategy in CCP.
3. Handling objects found: An agent deals with anobject at a time ( request help, select partners, thenmove object) in HCP while an agent broadcasts theobject information in CCP when an object is found.
For the CCP, negotiation of the object sequence isdelayed till having found a number of objects orhaving finished thesearchtask.
4. Sequence of handling objects: The sequence of han-dling objects in HCP is determined by the order thatan agent finds an object while by negotiation in CCP.The exhaustive search algorithm determine the or-der of object found.
5. Knowledge: The HCP makes decision with localknowledge other than global knowledge in CCP.
6. Object data: The CCP requires that every agentkeep all the object data while not in HCP.
6.4. Implementation
The transition diagram of CCP is shown in Fig. 4;and Fig. 5 shows the transition diagrams of each mod-ule. At first, agents start searching in SEARCHINGstate, broadcast the information (initial location, desti-nation location, and required number of agent) of eachobject found. After an agent has finished its search sub-task, it broadcasts this message and enters DECISIONstate. During searching, agents will start a coordina-tion process if they reach a coordination point, thenexchange local optimal selections and runCoordina-
Figure 4. State transition diagram of the CCP.
Figure 5. Each module’s state diagram of the CCP.
tion algorithm to obtain the global AOS. Coordinationand object handling can perform simultaneously. Ev-ery agent’s object sequence is stored in itsobject queue.When an agent enters DECISION state, it picks the nextobject from itsobject queueand changes to HELPINGstate for going toward the target object. When the agentarrives at the object, its state becomes WAITING. Ifthere are enough agents for carrying the object, theyenter MOVING state and move the object to its desti-nation. They each repeat the movement cycle until allassigned object tasks having been accomplished.
If the object queueis empty when an agent in DECI-SION and not all objects are scheduled in the AOS, theagent will wait for an assigned object task. This is forconsidering the cases when agents are in coordinationor specially when CI= M , i.e., coordination will startonly if all the area has been searched. An agent entersFINISH state when all objects have been scheduled andits object queueis empty.
7. Simulation
The object-sorting task was simulated in a multi-strategy simulator developed on Sun workstation withgraphic user interface showing the task execution. Thesimulator is a testbed for testing different cooperationprotocols on the OST. Figure 20 shows a sequence ofsnapshots for a task execution before its start, duringthe execution, and after its completion.
7.1. Simulation Environment
The working area was equally partitioned intoN sub-areas, and each subarea was assigned to an agent. Thearea is represented in a two-dimensional coordinatesystem, e.g., 500× 200. The partition of the area isrepresented by am× n notation,m in x-axis directionandn in y-axis direction. For example, 5× 2 parti-tion means that the area is equally partitioned into 5subparts inx-axis direction and 2 subparts iny-axisdirection, as showed in Fig. 6. In the experiment, thearea was 500× 200. Figure 6 shows the map used inthe simulation forN = 10 agents with 5× 2 partition.The partitions for different number of agentsN usedin the experiment are shown in Table 2.
Each agent searches for the objects in its subareaand moves the objects to their destinations. The per-formance was evaluated with the number of time steps.The following code fragment describes the actions per-formed by the agent at each time step.
for each agenti ,do the search module of agenti ;do the motion module of agenti ;do the communication module of agenti .
The area is a grid area, and the agents can only moveto one of the four locations from a location in a time unitas the Fig. 7. The agents can sense the objects locatedin the grids adjacent to the agents as the Fig. 8. Theagents may use any exhaustive search method to searchtheir subarea. In this experiment, a row-major methodwas used. They start search from the initial location,
the (0, 1) location of their subarea, to the right sideboundary, and search the first three rows which areunder the sensor range. When they have reached theright side boundary, they search the second three rowsand change the search direction from right to left. Whenthey has reached the left side boundary, they change thesearch direction from left to right and start searching thenext three rows. The search repeats until the subareahas been searched.
Each message has one time unit delay, i.e., a messagesent at timet will be received att + 1. Computationcan be performed with movement of agents, thus thecomputation time is ignored in performance evaluation.
Each object was randomly generated for its destina-tion, initial location, and the number of required agents.This experiment generated 10 sets of object data foreach number of objectM usingnmax= 10. All objectsets were run forN = 10, 20, 30, 40, and 50. Whenthe object sets were applied toN = 1, 2, 4, and 8, thennmax was set toN and all theni were proportionallyadjusted in order to accomplish the task.
The experiment was run by varying the number ofagentsN, and the number of objectsM . For a givennumberM of objects, the execution time was the av-erage of the execution time run from the 10 generatedobject sets ofM . The performance was evaluated bycomparing the execution time under different numberof agents and different number of objects. The actualexecution time performed by the HCP was representedby H , and C for the CCP. The reference executiontime were the upper bound,U , and the estimated lowerbound,L.
The upper bound is the execution time of thepro-fessional furniture movers(PFM) which is a centrally-controlled model. In PFM, all the agents start togethersearching the area for objects. When they find an ob-ject, a group of agents are assigned to move the object.The remaining agents continue searching objects andassigning groups. If the main search group is too smallto move an object, they will wait. After the assignedgroups have delivered their objects, they return backto join the main search group. The main group wouldfinally become large enough to move the object afterthe assigned groups return one after another. In or-der to simplify the problems of group separation and
combination for the model, each assigned group is as-sumed to return to the location where its object wasfound. When a group returns to the previous location,it follows the same search path of the main group sothat the two groups will meet eventually. The processis repeated till they have searched the entire area anddelivered all the objects.
The estimated lower time is the execution time un-der the operation model that the other agents are alwaysavailable for offering help when an agent finds a largeobject. The available agents are assumed to be in thecentral point of their subareas. An agent chooses itspartners which are closer to it, i.e., with minimum cost.The execution time of each agent is its subarea searchtime and all the processing time for the objects locatedin its subarea. The processing time of the objectj lo-cated in the agenti is the wait time for the arrival of allits partners, the movement time for objectj , and thereturn time from the destination of the objectj to theinitial location of j . So, the estimated lower bound isthe maximum time among the execution time of all theagents.
L = Max TAi
TAi = TSi +∑
j
TOi j
TOi j = TWi j + TMi j + TRi j
where
L: estimated lower bound.TAi : the total execution time of agenti .TSi : the time for agenti to search its subarea.
TOi j : the processing time of objectj located inthe subarea of agenti .
TWi j : the maximum wait time of objectj for all thehelping agents of agenti .
TMi j : the time that agenti moves objectjto its destination.
TRi j : the time that agenti returns from thedestination of objectj to the previous location.
7.2. Simulation Results of HCP
The experimental results of HCP showed that 1) Theprotocol is stable and reliable under a spectrum ofworkload. 2) The execution time increases linearly withthe number of objects. 3) Increasing the number ofagents can significantly decrease the waiting time andimprove the performance.
Figure 9. The execution time of HCP forN = 10 agent.
At first, the actual execution time,H , was com-pared with the estimated lower bound and upper bound.Figure 9 shows the relationship between the executiontime and the number of objects forN= 10 agents. Intu-itively, as the number of objects to be moved increases,the execution time, either estimated or actual, will in-crease. In general, the upper bound model needs moretime to do the task because it moves the objects sequen-tially.
When the workload is light, it takes less time to waitfor help. As a result, the performance of the coopera-tion protocol approaches the lower bound. The agentssearch their subareas simultaneously and move objectssimultaneously if they don’t need to wait for the others.
Under heavy workloads, there are more demandsfor agents and each agent must spend more time towait for help. Since every agent is often busy, the de-gree of concurrency is decreased. The agents have atendency to group together and move objects sequen-tially. If most objects require a large number of agentsto move, the system behavior will approach the upperbound in which objects are moved one by one. Further-more, most agents will find objects and need help whenthey return to their subareas due to heavy workloads.Under this situation, agents will waste time in return-ing to subareas and going to help move the next object.Hence, the performance of HCP will be equal to (evenworse than) the upper bound under heavy workloadsituations, e.g., 200 objects.
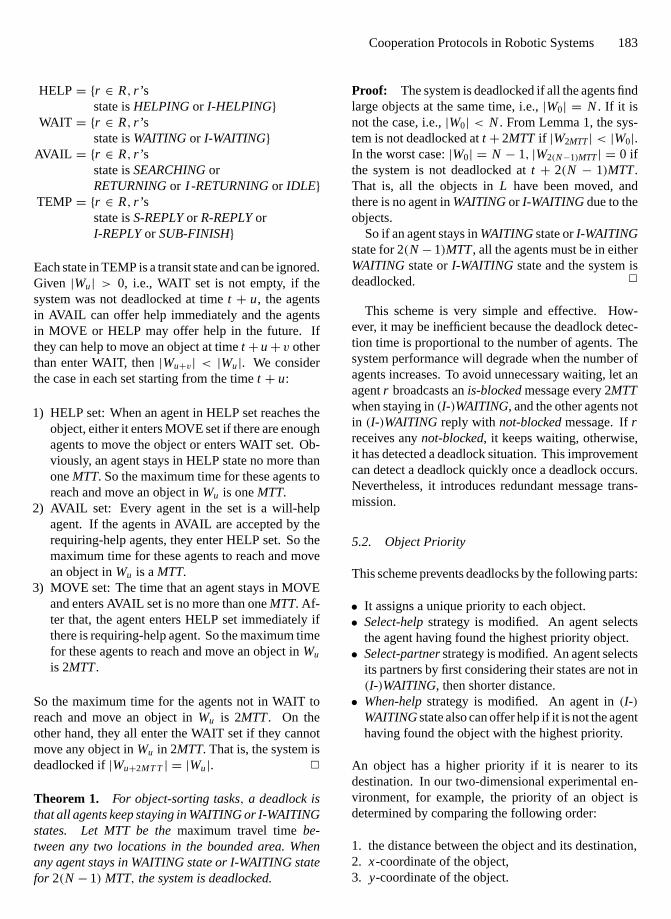
In comparison, the HCP is much better than the upperbound model in the experiments summarized in Fig. 10which shows theU , H , andL for N= 50 agents underdifferent number of objects. When using more agents,the performance of all three models has been improved.The more agents do the task, the faster the task is fin-ished. Moreover, the HCP is better than the upper boundmodel even under heavy workloads. It showed that theHCP can effectively utilize the agent power.
Second, the execution time for different numberof agents under the same object sets were compared.
Figure 10. The execution time of HCP forN = 50 agents.
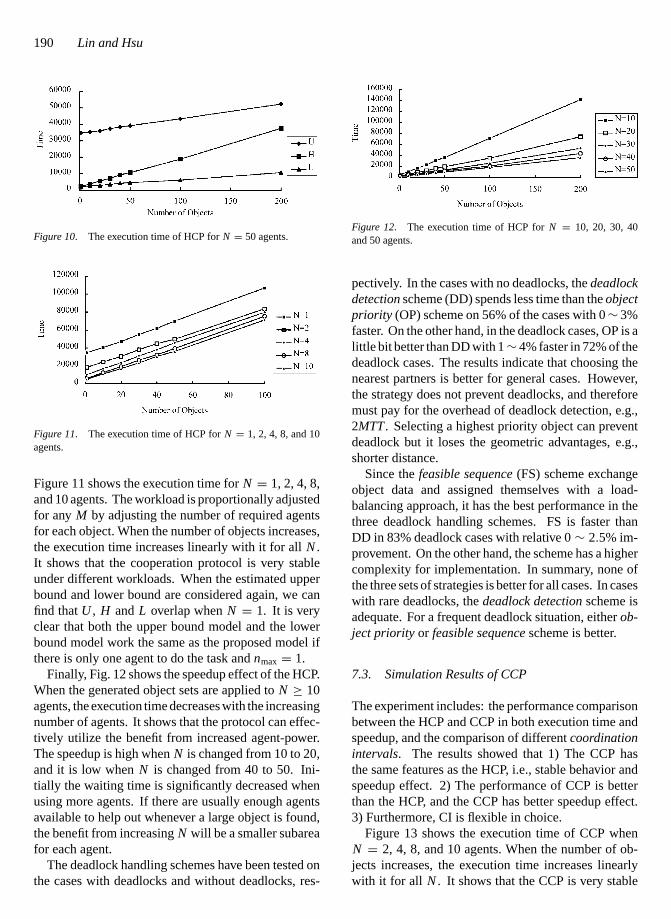
Figure 11. The execution time of HCP forN = 1, 2, 4, 8, and 10agents.
Figure 11 shows the execution time forN = 1, 2, 4, 8,and 10 agents. The workload is proportionally adjustedfor any M by adjusting the number of required agentsfor each object. When the number of objects increases,the execution time increases linearly with it for allN.It shows that the cooperation protocol is very stableunder different workloads. When the estimated upperbound and lower bound are considered again, we canfind thatU , H andL overlap whenN = 1. It is veryclear that both the upper bound model and the lowerbound model work the same as the proposed model ifthere is only one agent to do the task andnmax= 1.
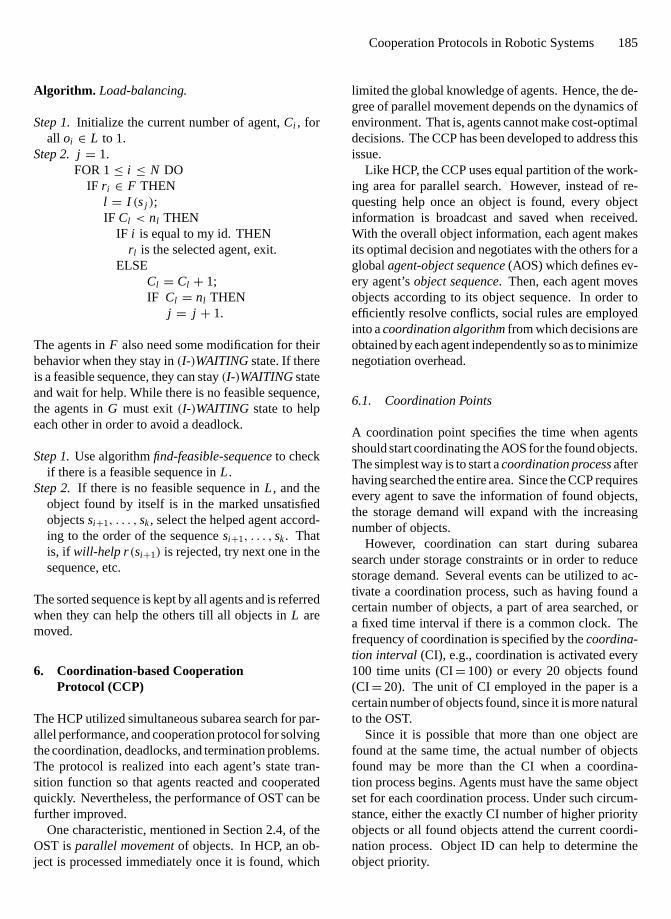
Finally, Fig. 12 shows the speedup effect of the HCP.When the generated object sets are applied toN ≥ 10agents, the execution time decreases with the increasingnumber of agents. It shows that the protocol can effec-tively utilize the benefit from increased agent-power.The speedup is high whenN is changed from 10 to 20,and it is low whenN is changed from 40 to 50. Ini-tially the waiting time is significantly decreased whenusing more agents. If there are usually enough agentsavailable to help out whenever a large object is found,the benefit from increasingN will be a smaller subareafor each agent.
The deadlock handling schemes have been tested onthe cases with deadlocks and without deadlocks, res-
Figure 12. The execution time of HCP forN = 10, 20, 30, 40and 50 agents.
pectively. In the cases with no deadlocks, thedeadlockdetectionscheme (DD) spends less time than theobjectpriority (OP) scheme on 56% of the cases with 0∼ 3%faster. On the other hand, in the deadlock cases, OP is alittle bit better than DD with 1∼ 4% faster in 72% of thedeadlock cases. The results indicate that choosing thenearest partners is better for general cases. However,the strategy does not prevent deadlocks, and thereforemust pay for the overhead of deadlock detection, e.g.,2MTT. Selecting a highest priority object can preventdeadlock but it loses the geometric advantages, e.g.,shorter distance.
Since thefeasible sequence(FS) scheme exchangeobject data and assigned themselves with a load-balancing approach, it has the best performance in thethree deadlock handling schemes. FS is faster thanDD in 83% deadlock cases with relative 0∼ 2.5% im-provement. On the other hand, the scheme has a highercomplexity for implementation. In summary, none ofthe three sets of strategies is better for all cases. In caseswith rare deadlocks, thedeadlock detectionscheme isadequate. For a frequent deadlock situation, eitherob-ject priority or feasible sequencescheme is better.
7.3. Simulation Results of CCP
The experiment includes: the performance comparisonbetween the HCP and CCP in both execution time andspeedup, and the comparison of differentcoordinationintervals. The results showed that 1) The CCP hasthe same features as the HCP, i.e., stable behavior andspeedup effect. 2) The performance of CCP is betterthan the HCP, and the CCP has better speedup effect.3) Furthermore, CI is flexible in choice.
Figure 13 shows the execution time of CCP whenN = 2, 4, 8, and 10 agents. When the number of ob-jects increases, the execution time increases linearlywith it for all N. It shows that the CCP is very stable
Figure 13. The execution time of CCP forN = 2, 4, 8, and 10agents, with CI= 1.
Figure 14. The execution time of CCP forN = 10, 20, 30, 40, and50 agents, with CI= 1.
under different workloads. When the generated objectsets are applied toN ≥ 10, the execution time decreaseswith the increasing number of agents as showed inFig. 14.
Table 3 further lists the speedup ratio relative to theexecution time ofN = 10 agents. Let the executiontime of N agents beCN . The speedup ratioSN is:
SN = (C10/CN)(10/N)
Compared with the HCP’s speedup ratio showed inTable 4, the CCP has significant effect on speedup. Itshows that the CCP can effectively utilize the increasedagent-power.
For most cases withM > 30, the speedup is linearor superlinear. There is obvious improvement on ob-jects movement because more agents make more ob-jects movement in parallel. For example, assume thereare three objects requiring 5, 6, and 7 agents respec-tively. They will be moved in sequence whenN = 10while moved in parallel whenN= 20. The speedupratio is 3. On the other hand, for small number of ob-jects, e.g.,M = 1, more agents decrease thesearchtime
Table 3. The CCP speedup ratio relative toN = 10.
Number ofobject, M
Number of agents,N
10 20 30 40 50
1 1 0.82 0.67 0.61 0.53
10 1 0.95 0.88 0.85 0.82
20 1 1.01 0.96 0.92 0.88
30 1 1.04 1.02 0.99 0.93
40 1 1.05 1.03 1.04 1.00
50 1 1.04 1.04 1.04 1.00
100 1 1.08 1.09 1.12 1.09
200 1 1.09 1.14 1.15 1.15
Table 4. The HCP speedup ratio relative toN = 10.
Number ofobject, M
Number of agents,N
10 20 30 40 50
1 1 0.81 0.65 0.57 0.48
10 1 0.88 0.69 0.68 0.59
20 1 0.89 0.83 0.75 0.61
30 1 0.93 0.80 0.76 0.65
40 1 0.91 0.84 0.76 0.67
50 1 0.91 0.85 0.72 0.69
100 1 1.00 0.90 0.83 0.76
200 1 0.95 0.87 0.79 0.76
due to smaller subarea. But, there is no obvious im-provement on object movement since there is no sig-nificant increasing parallelism. Hence, the results alsoprovide a useful reference when adding more agentsfor speedup. Where there is a superlinear speedup,adding more agents can be beneficial. Under sublinearspeedup condition, the benefit of adding more agentsis not as significant.
Next, Figs. 15 and 16 typically present the com-parison between HCP and CCP underN= 10 and 50agents, respectively. The CCP results include bothCI= 1 and CI=M , i.e., coordination activated oncefinding an object or after having searched the entirearea. No matter what CI value is chosen, the CCP isalways superior to the HCP. In addition, the CCP isobviously better than the upper bound model by com-paring Figs. 15, 16 with Figs. 9, 10. Through globalcoordination and cost-balanced strategy, the CCP canefficiently perform the OST.
Figure 15. Comparison of execution time for HCP and CCP whenN = 10.
Figure 16. Comparison of execution time for HCP and CCP whenN = 50.
Figure 17. Execution time for different coordination interval whenN = 10.
Finally, the effect of different CI is showed inFigs. 17 and 18 where CI= 1, 10, 20, 30, 40, 50, 100,and 200. Larger CI can make better decisions due toholding more information for coordination, and smallerCI requires more coordination processes. Hence, alarger CI has better performance than a smaller CI ingeneral. On the other hand, smaller CI requires lessstorage and is faster in generating the object sched-ule for movement. In addition, the difference between
Figure 18. Execution time for different coordination interval whenN = 50.
CI= 1 and CI=M becomes smaller when there aremore agents such asN = 50 in Fig. 18. Hence, CCPis flexible in choosing CI.
8. The Path to Implementation
This section describes communication and uncertaintyissues when implementing these cooperation protocolsin real robots. Variability in the proposed approach isillustrated by simulation on the object-drop uncertaintyand variable message delay.
8.1. Communication
The messages in the proposed protocols are important.They should not be lost. For example, if ahelpmessagebroadcast to the other agents is lost, the requiring-helpagent may not be able to move its object since theremay not be enough number of willing-help agents. Ifan agent’sselectionmessage is lost when broadcast-ing its selected object to the others, the coordinationalgorithm will fail in running the overall object sched-ule. Hence, a reliable communication system mustbe utilized for the cooperation protocols. A reliablecommunication system can guarantee that every mes-sage sent should reach the destination agent. The wellknown TCP/IP is a reliable communication protocol.It can be found in many popular systems such as Unixor Windows.
In the absence of reliable communication systems,additional mechanisms can be appended to the com-munication module. Each message sent is monitoredby acknowledgment and retransmission mechanisms.When an agent receives a message, it sends a messageback to the sender to acknowledge the received mes-sage. The sender will retransmit the message if it isnot acknowledged by its receiver within the predefinedtime duration.
Since agents have to move about in the area, awireless communication system is more suitable forimplementation. Effective communication distance ofmessages is an important issue in wireless communica-tion. Practical systems usually use relays or gatewaysto route messages from one cell to another. Studies oncommunication distance for optimal performance un-der different situations have been performed. In suchresearch, transmission waiting time (Yoshida et al.,1995) and task performance (Agah and Bekey, 1995)were considered for optimal performance. However,in our systems, certain tasks require all agents workingtogether. For example, ahelpmessage must reach allthe other agents in order to accomplish a task requir-ing all the agents. Hence, the communication distanceshould be at least as long as the working area.
Both broadcast messages and peer-to-peer messagesare employed in our systems. In a distributed environ-ment, agents don’t have the knowledge about the otheragents. Broadcast is necessary for agents to requesthelp. If broadcast communication is not supportedin the system, an alternative method must be imple-mented. One alternative is to give each agent the basicinformation of the other agents so that agents can es-tablish peer-to-peer channels between any two agents.When an agent wants to send a broadcast message, itwill be sent through all the peer-to-peer channels of theagent. Another method is to set up a central station tobroadcast messages. The central station has communi-cation channels with every agent. When an agent wantsto send a broadcast message, it sends the message tothe station. Then, the station forwards the message tothe other agents. Besides, a range of bandwidth can bereserved for the broadcast channel in the wireless envi-ronment. Every agent uses the special channel to sendbroadcast messages. In addition, every agent listens tothe channel to receive broadcast messages.
8.2. Variability
There are uncertainties in the sensors and manipu-lators of robots. Furthermore, variability in environ-ments may cause non-deterministic results. Variabilityon object movement and variable message delay arediscussed to illustrate the variability in the proposedapproach.
For object movement, an object may drop duringmovement. If the drop is detected, the agents must stopto pick up the object, then continue carrying the objectto its destination. The function of detecting dropped
objects can be implemented in the motion module. Ad-ditional states for the situation can be added to the statemachine for handling the problem. When the object ispicked up again, the state can change toMOVING tocontinue object movement.
Message delay is variable in a real environment.Many actions of agents must be synchronized for themto work together, e.g., waiting for willing-help mes-sage for choosing partners, waiting for the selectionsof the other agents for running the coordination al-gorithm. Hence, message delays also affect the sys-tem performance. Our previous simulation employeda centralized simulator which assumed a fixed messagedelay. In order to approach the real environment, wehave developed a distributed multi-workstation simu-lator in which each agent is represented by an inde-pendent process and distributed in several Sun Unixworkstations (Lin, 1997). Amonitor process is uti-lized to interact with the users. The monitor accepts atask specification from the user, initializes each agenton various workstations according to the task specifica-tion, waits for agents to establish their communicationchannels, then starts the task. Each agent performs thetask with the specified cooperation protocol and sendsreports to the monitor during execution. The monitorcollects reports from the agents and display the cur-rent progresses of the overall task and of every agent.Message delay is dependent on the load of the overallnetwork.
8.3. Simulation for Variability
Simulation for object movement and message delaywas performed for showing the variability in the pro-posed approach.
For object movement, a group of agents may droptheir object while moving to the destination. If theagents sense the drop event, they can pick up the objectand continue movement. In case the drop is not sensed,they may discover it after having reached the destina-tion and inspected the object. Hence, there are threeprobabilistic events: object-dropped, drop-sensed, anddrop-inspected events. For handling the uncertainty inobject movement, an INSPECT state has been added.When an agent in MOVING state has reached the desti-nation, it enters the INSPECT state and checks whetherthe object has dropped. If the object has dropped, theagent enters DROP-BACK state and follows the pathback to find the object. The modified state diagram forthe CCP is called UCCP and showed in Fig. 19.
The simulation was performed with the followingparameters:
Number of agents: 10Number of objects: 50Number of problem samples: 10Cooperation protocol: UCCPProbability of the object-dropped event: 0.5Probability of the drop-sensed event: 0.5Probability of the drop-inspected event: 0.95
Each problem sample was run 30 times. The meanand standard deviation of experimental results areshown in Tables 5 and 6. Table 5 lists the mean of the
execution time for each sample (UCCP), the mean ofthe occurred number of events (object-dropped, drop-sensed, and drop-inspected), and the increased execu-tion time cost relative to the CCP (Dtime). Table 6 liststhe standard deviation of the results.
Under variable environments, the cost is increasedbecause the agents must pay more effort to handle thevariability. The increased cost is about 12.6% of CCPunder the above simulation condition. From the illus-tration, the object-dropped uncertainty can be handledby the modified cooperation protocols.
The second part of the simulation was for mes-sage delay. Each problem sample was performed bythe multiple-workstation simulator (MWS) describedin the above subsection under different configurationswhich combining various computing power, networktraffic, and system load. The experimental parametersare listed as follows:
Number of agents: 10Number of objects: 50Number of problem samples: 10Number of configurations: 10Cooperation protocol: CCP
Table 7 lists the experimental results for each prob-lem instance. The results include the mean and stan-dard deviation of the performed configurations, and thecost difference (Dtime) between the fixed-delay simu-lator and the MWS. The increased cost is about 38% ofthe CCP. The results of all configurations can be dividedinto two parts according to the performance. They can
Mean Dtime Standard deviationSample (Time unit) (Time unit) (Time unit)
1 42456 8516 3836
2 39371 11343 4540
3 40948 10644 4164
4 34371 10771 3750
5 36114 9322 3393
6 35944 12552 4114
7 37691 9645 3859
8 36289 12569 4404
9 41713 11300 4286
10 37106 9980 4230
Average 38200 10664 4058
Standarddeviation 2619 1264 328
represent different kinds of performance. For the betterfirst half results, the increased cost is about 27% whilethe increase is 49% for the remaining results. Hence,variability on message delay is an important issue forthe task performance.
9. Conclusion
A complex multi-agent task, theObject-Sorting Task(OST), is discussed in the paper for solvingcooper-ation and parallelism problems in multi-agent tasks.
Parallelism and cooperation requirements are embed-ded in the OST. In order to accomplish the task,cooperation is required. In addition, the degree of par-allelism affects the performance. To cooperate eachother while maintaining parallelism is an importantproblem of multi-agent tasks. Several cooperation pro-tocols for solving multi-agent tasks are presented, anddemonstrated on solving the OST.
All the protocols are realized by a reactive, mod-ularized architecture. With the architecture, differentprotocols can be easily implemented. This paper pro-vides several design criteria for solving the OST, and aframework for the implementation. From the analysisof experimental results, we can conclude:
1) In distributed autonomous robotic systems withoutglobal knowledge, thehelp-based cooperation pro-tocol (HCP) is suitable for coordinating agents tohelp each other.
2) Where there is a requirement for immediate re-sponse, e.g., an object must be handled once it isfound, the HCP is appropriate.
3) The performance ofcoordination-based coopera-tion protocol (CCP) is better than the HCP witha global consideration and embedded social rules,the result is close to a deliberate approach, geneticalgorithms, implemented in Lin and Hsu (1995b).Where the global knowledge is available, the CCPis more suitable for better performance.
4) The deadlock handling schemes provide a founda-tion for solving resource conflicts in a multi-agentenvironment.
Figure 20. Three snapshots of a task execution in simulation.
The HCP and CCP are superior to the model ofpro-fessional furniture movers(PFM), which searches andmoves objects sequentially. When the workload isheavy, such as 10 agents handling 200 objects in whichthe total required number of agents for object move-ment is around 1100 agents, the performance of HCPis approximately equal to that of PFM. However, whenthe number of agents is increased to 50, the executionof HCP is 40 percent faster than the PFM.
Several extensions and future work have been iden-tified by the authors during this research. From theperformance comparison, there is a point in which acooperation protocol and the PFM have the same ex-ecution time. The relationship between the executiontime of a cooperation protocol and the PFM is depen-dent on the number of agents, the number of objects, thetotal number of required agents, and the working areasize, etc. Further study is necessary to decide which
cooperation protocol or the PFM should be employedfor a specific object-sorting task.
The PFM can be further extended to consider theissues of cooperation. For example, where is the pre-ferred return location when an assigned group hasmoved its object to the destination? If there is no ne-gotiation among the groups, a group can only returnto its object’s original location and continue searchingby following the predefined search path. If the mainsearch group is still searching when a group finishesits subtask, the group may inquire the current locationof the main group and go to the location directly. But,the main group could have moved on to another loca-tion when the group reaches the specified location. Ifthe main group wants to predict the next location formeeting with the assigned group, how does it make theprediction? Hence, communication, coordination anddeadlock problem must be considered for such exten-sions.
There are other approaches to solving the OST. Oneis the elected leader approach (EL). A leader is se-lected to coordinate the activities of agents. It can beviewed as a variation of the centralized approach, inwhich a single leader is elected to make decisions forassigned tasks. In a sense, the HCP embeds the princi-ple of EL since an agent becomes a leader when it findsa large object. It will request help and decide whichagents will be its partners, then wait for the partnersto move the object together. The HCP is more efficientthan the EL because the HCP utilizes more leaderswhich are distributed and working simultaneously. Inaddition, the leader concept is employed by the CCP.Each agent provides its own selection for schedulingobjects. The common coordination algorithm collectsthe selections and decides the object schedule. More-over, the coordination algorithm can be performed bythe leader provided that the other agents send their se-lection to the leader. In fact, the CCP is more effec-tive than the EL because the coordination algorithmis common to all the agents and can be performed byeach agent. The load can be distributed onto all theagents.
On the other hand, error recovery issue of the ELis not yet considered by the HCP and CCP. When theelected leader is disabled, a new leader can be elected.Election mechanisms combined with the leader con-cepts inside the HCP and CCP can be studied to addressthe fault tolerance and error recovery issues.
Objects in the OST are assumed to be indepen-dent in our current research. There may be constraints
among objects in some cases. For example, the ob-jects must be sorted by their size. That is, larger ob-jects must be moved first. Then, smaller objects willbe moved later and placed on the larger objects. ForCCP to consider such situations, each agent must makeits own selection according to the order. For HCP,each agent must not request help until it has searchedits subarea. After it has searched its subarea, it re-quests help according to the object order. The statemachine of HCP must be extended to handle the sit-uations. Anyway, the evaluation function of the OSTis still valid. No matter which sequence the objectsare found or the number of objects needed to be pro-cessed by each agent, the actual sequence of the objectsprocessed by each agent defines anAgent-Object Se-quence(AOS). Hence, the cost of each agent is the ac-tual cost spent by the agent for handling all the objectsin its object sequence. It is independent of any objectconstraints.
For HCP, using different sets of cooperation strategy(when-help, select-help,...) will have different perfor-mance. For CCP, the utilized coordination strategy de-termines its performance. Many other strategies can bedeveloped to improve the performance of OST as wellas for applying to other domains.
Adaptation of cooperation protocols will be requiredin a dynamic environment. And the proposed archi-tecture can be developed to automatically generatethe implementation for different sets of cooperationprotocols.
Acknowledgment
The authors would like to thank Professor George A.Bekey and the anonymous referees. Their valuablecomments have led to a much improved paper. Thisresearch was supported in part by a grant from ROCNational Science Council (NSC 84-2212-E-002-087).
References
Agah, A. and Bekey, G.A. 1995. In a team of robots the loudest is notnecessarily the best. InProc. of the 1995 IEEE International Con-ference on Systems, Man, and Cybernetics, Vancouver, Canada,pp. 3800–3805.
Alami, R., Robert, F., Ingrand, F., and Suzuki, S. 1995. Multi-robotcooperation through incremental plan-merging. InProc. of IEEEInternational Conference on Robotics and Automation, Nagoya,Japan, pp. 2573–2579.
Arkin, R.C. 1989. Motor schema-based mobile robot navigation.International Journal of Robotics Research, 8(4):92–112.
Arkin, R.C. 1992. Cooperation without communication: Multi-agent schema based robot navigation.Journal of Robotic Systems,9(3):351–364.
Arkin, R.C. and Hobbs, J.D. 1992. Dimensions of communicationand social organization in multi-agent robotic systems. InProc.2nd Inter. Conf. on Simulation of Adaptive Behavior, Honolulu,HI, pp. 486–493.
Arkin, R.C., Balch, T., and Nitz, E. 1993. Communication of behav-ioral state in multi-agent retrieval tasks. InProc. of 1993 IEEEInternational Conference on Robotics and Automation, GA, pp.588–594.
Asama, H., Matsumoto, A., and Ishida, Y. 1989. Design of an au-tonomous and distributed robot system: ACTRESS. InProc. ofIEEE/RSJ International Workshop on Intelligent Robots and Sys-tems ’89, Tsukuba, Japan, pp. 283–290.
Balch, T. and Arkin, R.C. 1994. Communication in reactive multia-gent robotic systems.Autonomous Robots, 1:27–52.
Brooks, R.A. 1986. A robust layered control system for a mobilerobot. IEEE Journal of Robotics and Automation, RA-2(1):14–23.
Brooks, R.A., Maes, P., Mataric, M., and More, G. 1990. Lunarbase construction robots. InProc. IEEE International Workshopon Intelligent Robots and Systems (IROS ’90), Tsuchiura, Japan,pp. 389–392.
Fukuda, T., Nakagawa, S., Kawauchi, Y., and Buss, M. 1989.Structure decision method for self organizing robots based oncell structure—CEBOT. InProc. of IEEE International Confer-ence on Robotics and Automation, Scottsdale Arizona, pp. 695–700.
Hackwood, S. and Beni, S. 1992. Self-organization of sensors forswarm intelligence. InProc. of 1992 IEEE International Con-ference on Robotics and Automation, Nice, France, pp. 819–829.
Lamport, L. 1986. The mutual exclusion problem: Part II—Statementand solutions.J. ACM, 33(2):327–348.
Lin, F.C. 1997. A cooperation framework for multi-agent roboticsystems. Ph.D. Thesis. Department of Computer Science and In-formation Engineering, National Taiwan University, Taiwan.
Lin, F.C. and Hsu, J.Y.-j. 1995a. Cooperation and deadlock-handlingfor an object-sorting task in a multi-agent robotic system. InProc.of IEEE Inter. Conf. on Robotics and Automation, Nagoya, Japan,pp. 2580–2585.
Lin, F.C. and Hsu, J.Y.-j. 1995b. A genetic algorithm approach for theobject-sorting task problem. InProc. of the 1995 IEEE Interna-tional Conference on Systems, Man, and Cybernetics, Vancouver,Canada, pp. 241–246.
Mataric, M. 1992. Minimizing complexity in controlling a mo-bile robot population. InProc. of 1992 IEEE International Con-ference on Robotics and Automation, Nice, French, pp. 830–835.
Yoshida, E., Yamamoto, M., Arai, T., Ota, J., and Kurabayashi, D.1995. A design method of local communication area in multiplemobile robot system. InProc. of IEEE International Conferenceon Robotics and Automation, Nagoya, Japan, pp. 2567–2572.
Wang, J. 1993. Establish a globally consistent order of discrete eventsin distributed robotic systems. InProc. of 1993 IEEE InternationalConference on Robotics and Automation, GA, pp. 853–858.
Wang, J. 1995. Operating primitives supporting traffic regulation andcontrol of mobile robots under distributed robotic systems. InProc.of IEEE International Conference on Robotics and Automation,Nagoya, Japan, pp. 1613–1618.
Fang-Chang Lin received his PhD degree in Computer Science andInformation Engineering from National Taiwan University in Jan-uary 1977. His research interests include multi-agent cooperation,multi-robot systems, distributed agent collaboration, computer net-work, and artificial intelligence. From February 1977, he works onthe project concerning high speed network service at Institute forInformation Industry in Taiwan.
Jane Yung-jen Hsu is an associate professor of Computer Sci-ence and Information Engineering at the National Taiwan University.She received her PhD in Computer Science from Stanford Univer-sity in 1991. Her research interests include planning and learn-ing for mobile robots in dynamic environments, intelligent softwareagents, data mining, and intelligent computer-assisted learning envi-ronments. She is a member of IEEE, ACM, AAAI, and the Phi TauPhi Scholastic Honor Society. She currently serves on the editorialboard of “Intelligent Data Analysis—An International Journal.”