21
Evergreen Andreas Profous December 5, 2011
| Date post: | 18-Jul-2015 |
| Category: |
Technology |
| Upload: | senand |
| View: | 89 times |
| Download: | 0 times |

Evergreen
Andreas Profous
December 5, 2011

Outline
OverviewIntroductionEvergreen Features
New NavEngine FeaturesOverviewConsumption ModelOne-to-many Search
Summary
1

Outline
OverviewIntroductionEvergreen Features
New NavEngine FeaturesOverviewConsumption ModelOne-to-many Search
Summary
2 Overview
Introduction
I Evergreen: reduce range anxiety in Renault electric carsI Evergreen has two deliverablesI NFA 2.5: update of TomTom NAV2 in-dash device.
I In Production. Used in Renault Fluence ZE cars.I MM2012: part of Strasbourg
I Bugfixing phase. This talk is about Strasbourg.
3 Overview
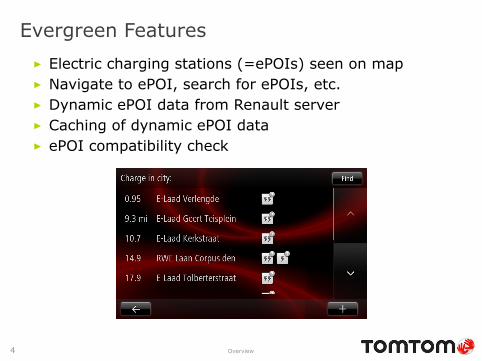
Evergreen Features
I Electric charging stations (=ePOIs) seen on mapI Navigate to ePOI, search for ePOIs, etc.I Dynamic ePOI data from Renault serverI Caching of dynamic ePOI dataI ePOI compatibility check
4 Overview

Evergreen Features, Part 2
I Consumption model yields energy estimateI Driving style differences → learning driver profileI New eco-routing uses consumption modelI Warning in case user cannot reach destination
5 Overview

Evergreen Features, Part 3
I Route colored according to reachabilityI Patatoid = Reachable area on mapI Warning in case battery is low
6 Overview

Teams Involved
I User Interface.I Map Visualization. Patatoid renderingI NavEngine. Consumption model, one-to-many searchI DALE. ePOI data structures, ePOI cachingI MapToolChain. Node elevation format, ePOI formatI CPU. Node elevation data, ePOI dataI BU Automotive. Car interface, Learning Driver ProfileI TTSD. User update of ePOI data
7 Overview

Challenges
I Lots of components involved. Communication gaps.I Incomplete, inconsistent requirements from RenaultI Continuously changing requirementsI No meaningful scheduleI Platform changes: NFA 2.5 NAV2, Strasbourg Android
8 Overview

Outline
OverviewIntroductionEvergreen Features
New NavEngine FeaturesOverviewConsumption ModelOne-to-many Search
Summary
9 New NavEngine Features

Overview
10 New NavEngine Features
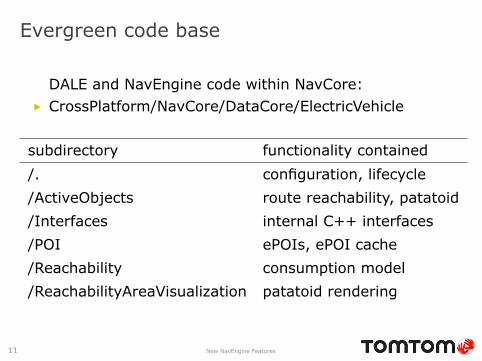
Evergreen code base
DALE and NavEngine code within NavCore:I CrossPlatform/NavCore/DataCore/ElectricVehicle
subdirectory functionality contained
/. configuration, lifecycle
/ActiveObjects route reachability, patatoid
/Interfaces internal C++ interfaces
/POI ePOIs, ePOI cache
/Reachability consumption model
/ReachabilityAreaVisualization patatoid rendering
11 New NavEngine Features

Consumption Model
I Necessary for patatoid, route coloring,destination flag
I Specified by RenaultI Rules for estimating the consumption
of a single line
consumption of a single lineConsumption = FVehicleCons + slopeCons + auxCons
I Unit is energy in kWh
12 New NavEngine Features

FVehicle Consumption
I Speed-dependent consumptionI Accounts for friction, air dragI FVehicle = table of consumption per distance
for a given speedI Example: at a speed of 70 km/h,
it’s 7.3 kWh per 100 km
FVehicle consumption of a single lineFVehicleCons = FVehicle(line speed) × length of segment
I FVehicle table = output of Learning Driver Profile
13 New NavEngine Features

Slope Consumption
I Additional consumption when driving uphillI Battery recharge when driving downhillI Needs node elevation data
slope consumptionslopeCons = constant × carWeight × g × ∆height
I constant = 0.97 for uphill, 0.9 for downhillI g = 9.81 m
s2
I ∆height = height(toNode) − height(fromNode)I Check to ensure battery is not recharged beyond
capacity
14 New NavEngine Features
Auxiliary Consumption
I Consumption due to heating, air condition,lights, etc.
auxiliary consumptionauxCons = auxPower × travel time of line
I auxPower is the auxiliary power given in WattsI Delivered via reflection from carI Value is unknown at system startupI Special rules about what value to assume in that case
15 New NavEngine Features

Consumption Model Summary
I Consumption of single line: sum of three partsI FVehicle consumption. Uses Learning Driver Profile
outputI Slope consumption. Uses node elevationI Auxiliary consumption. Uses auxilary power from car
I Needs:I Node elevation dataI Weight of car, auxiliary power, FVehicle table
I Necessary for:
16 New NavEngine Features

One-to-many Search
I Search in all directions from current positionI Similar to route planning, but without destination
I For all possible optimal routes, applies consumptionmodel to check how much energy is needed
I Needed for: patatoid shape, exact ePOI distances
17 New NavEngine Features
Outline
OverviewIntroductionEvergreen Features
New NavEngine FeaturesOverviewConsumption ModelOne-to-many Search
Summary
18 Summary

Summary
I Evergreen: reduce range anxiety in Renault electric carsI Electric charging stationsI Node elevation dataI Consumption model. Used for:
19 Summary

Thank you
Any questions?

















