38
Johns Hopkins Engineering Autonomous Personal Air Vehicle (APAV) 645.800 Systems Engineering Project Bryant Tong Fall 2018 Presented December 7 th , 2018, 8:30 pm Mentor: Steve Biemer 1

Johns Hopkins EngineeringAutonomous Personal Air Vehicle (APAV)
645.800 Systems Engineering ProjectBryant Tong
Fall 2018Presented December 7th, 2018, 8:30 pm
Mentor: Steve Biemer
1
ep.jhu.edu
Outline
2
1. Biography2. Introduction & Need for System3. Requirements4. Concept of Operations (CONOPS)5. Functional Concept6. Physical Concept7. Trade Study8. Risk Management9. Test Plan10. System Specification11. Summary of Final Concept and Further Work12. Lessons Learned13. Recommendations

ep.jhu.edu
Biography
3
§ Education§ B.S. in Mechanical Engineering (May 2014) from the University of
Maryland, College Park§ M.S. in Systems Engineering (expected 2018) from Johns Hopkins
University, Engineering for Professionals§ Experience
§ Perspecta (formerly Vencore, formerly The SI Org.) – [Aug 2014 to Oct 2018]§ Systems Engineer
§ Supported systems engineering/integration lifecycle for the acquisition of a critical Command and Control software
§ Predictive Modeling Analyst§ Analyzed detailed system and operational requirements of Geospatial Intelligence (GEOINT) systems
through the use of the modeling and simulation
§ Johns Hopkins Applied Physics Lab (APL) – [Oct 2018 to Present]§ Modeling and Simulation Analyst (FPS/KVQ)
§ Support to precision strike analysis. Modeling and analysis of radar systems and Integrated Air Defense Systems

ep.jhu.edu
Introduction & Need for System
4
§ The APAV system provides an alternative method of transportation which integrates various sensor packages with high-precision navigation in order to autonomously transport passengers and cargo
§ The need:§ Average U.S. commute times can reach up to 34.7 minutes one-way§ Number of workers with commute times ≥45 min is growing at a faster rate than
those with commute times <45 min§ Longer commutes have been seen to be linked with increased rates of obesity,
high cholesterol, high blood pressure, back and neck pain, divorce, depression and death
§ A study from the United States Department of Transportation attributes 94% of serious crashes to human choices
§ The APAV offers a fully-electric solution which helps address the rising concern of global warming and carbon emissions§ Cars and trucks account for nearly one-fifth of all U.S. emissions, emitting 24 pounds of carbon dioxide
and other global warming gases per gallon of gas

ep.jhu.edu
Requirements (1 of 2)Approach
5
§ Requirements generation approach:§ Identify top-level User/Mission Needs§ Decompose User Needs into:
§ Operational Requirements (mission and scope)§ Functional Requirements (capabilities/tasks)§ Performance Requirements (quantitative ability)§ Interface Requirements (external interfaces)§ Constraint Requirements (limitations, -ilities)
§ Each requirement written to be unambiguous, verifiable, clear, and implementation-free
§ Every requirement traceable back to User Needs
§ Identified verification methods for each requirement (inspection, analysis, demonstration, test)
User Needs
Operational Requirements
Functional Requirements
Performance Requirements
Interface Requirements
*Iterative Process
Constraint Requirements
ep.jhu.edu
Requirements (2 of 2)Sources and Stakeholders
6
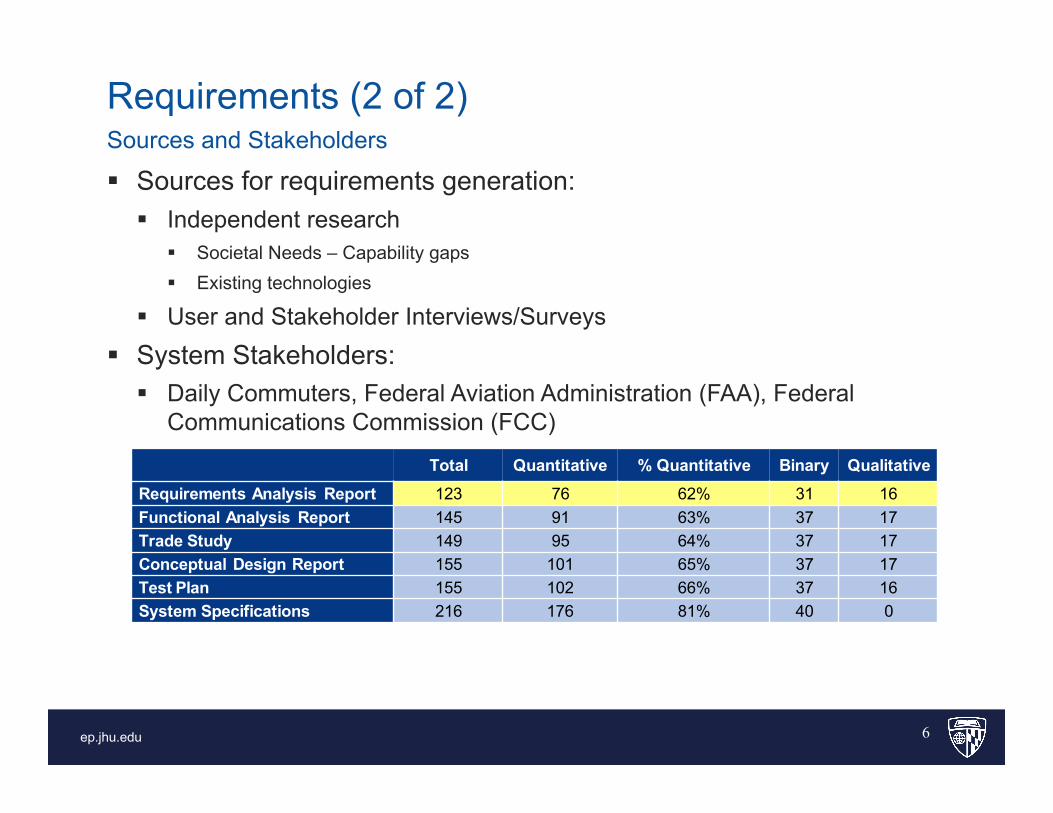
§ Sources for requirements generation:§ Independent research
§ Societal Needs – Capability gaps§ Existing technologies
§ User and Stakeholder Interviews/Surveys§ System Stakeholders:
§ Daily Commuters, Federal Aviation Administration (FAA), Federal Communications Commission (FCC)
Total Quantitative % Quantitative Binary QualitativeRequirements Analysis Report 123 76 62% 31 16Functional Analysis Report 145 91 63% 37 17Trade Study 149 95 64% 37 17Conceptual Design Report 155 101 65% 37 17Test Plan 155 102 66% 37 16System Specifications 216 176 81% 40 0

ep.jhu.edu
Concept of Operations (CONOPS) (1 of 3)System OV-1
7
APAV
OtherAircraftWeather
EmergencyResponse
EnvironmentalObstructions
GPS
FederalAviationAgency(FAA)
SenseandAvoid
SenseandAvoid
EphemerisandAlmanacData
Communications(e.g.Commanding,Status,EmergencyNotification)
Communications(e.g.Coordination)
Communications(e.g.Commanding,Status,EmergencyNotification)
Communications(e.g.Commanding,Status,EmergencyNotification)
EmergencyAssistance(e.g.LandingPads,Blockades)
NationalWeatherService(NWS)
ConditionsandForecasts
SenseandAdjust

ep.jhu.edu
Concept of Operations (CONOPS) (2 of 3)Scenario: Baseline
8
Passenger(s)
EnterandActivate
GPS NWS Environment (e.g.weather,birds, trees)
EmergencyResponse FAAOther
VehiclesAPAV
EnterDestination
BuckleSafetyStraps
PerformPre-takeoffSystemChecks NotifyUserforTakeoff
TakeoffandReachCruisingAltitude
EphemerisandAlmanacData
ConditionsandForecast
EphemerisandAlmanacData
ConditionsandForecast
Sense,Avoid,andAdjust
Sense,Avoid,andAdjust
AdjustClimateControlConfigureEntertainmentSystem
EngageLandingProcedures
PowerDownExitandArriveatDestination
Sense,Avoid,andAdjustEphemerisandAlmanacData
Sense,Avoid,andAdjust
ep.jhu.edu
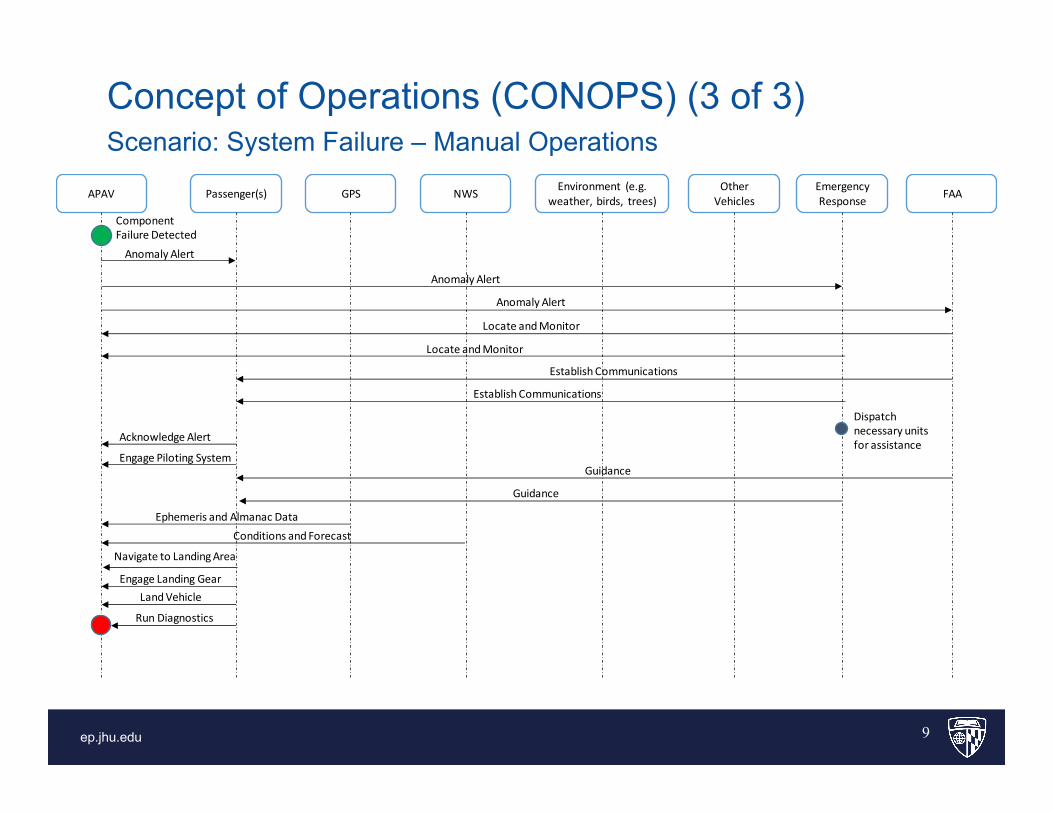
Concept of Operations (CONOPS) (3 of 3)Scenario: System Failure – Manual Operations
9
Passenger(s)
ComponentFailureDetected
GPS NWS Environment (e.g.weather,birds, trees)
EmergencyResponse FAAOther
VehiclesAPAV
AnomalyAlert
AnomalyAlert
Dispatchnecessaryunitsforassistance
AcknowledgeAlert
AnomalyAlert
LocateandMonitor
EphemerisandAlmanacData
LocateandMonitor
EstablishCommunications
EstablishCommunications
EngagePilotingSystem
NavigatetoLandingArea
Guidance
Guidance
ConditionsandForecast
EngageLandingGearLandVehicle
RunDiagnostics
ep.jhu.edu
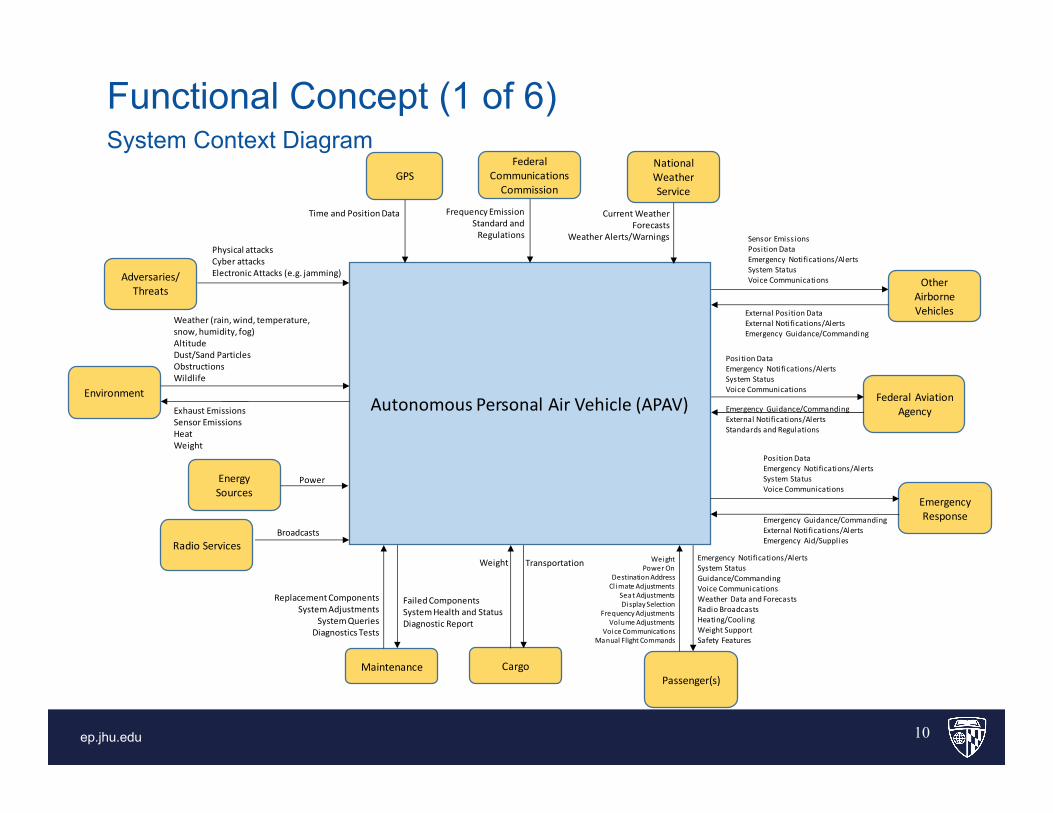
Functional Concept (1 of 6)System Context Diagram
10
AutonomousPersonalAirVehicle(APAV)
Passenger(s)Cargo
EnergySources
Adversaries/Threats
FederalAviationAgencyEmergency Guidance/Commanding
ExternalNotifications/AlertsStandardsandRegulations
OtherAirborneVehicles
EmergencyResponse
GPS
PhysicalattacksCyberattacksElectronicAttacks(e.g.jamming)
Power
Weight Transportation WeightPowerOn
DestinationAddressCl imateAdjustments
SeatAdjustmentsDisplaySelection
FrequencyAdjustmentsVolumeAdjustments
VoiceCommunicationsManualFlightCommands
EnvironmentExhaustEmissionsSensorEmissionsHeatWeight
Weather(rain,wind,temperature,snow,humidity,fog)AltitudeDust/SandParticlesObstructionsWildlife
TimeandPositionData
NationalWeatherService
CurrentWeatherForecasts
WeatherAlerts/Warnings
Maintenance
SensorEmissionsPositionDataEmergency Notifications/AlertsSystemStatusVoiceCommunications
PositionDataEmergency Notifications/AlertsSystemStatusVoiceCommunications
PositionDataEmergency Notifications/AlertsSystemStatusVoiceCommunications
ExternalPositionDataExternalNotifications/AlertsEmergency Guidance/Commanding
Emergency Guidance/CommandingExternalNotifications/AlertsEmergency Aid/Supplies
FederalCommunicationsCommission
FrequencyEmissionStandardandRegulations
RadioServicesBroadcasts
Emergency Notifications/AlertsSystemStatusGuidance/CommandingVoiceCommunicationsWeatherDataandForecastsRadioBroadcastsHeating/CoolingWeightSupportSafetyFeatures
ReplacementComponentsSystemAdjustments
SystemQueriesDiagnosticsTests
FailedComponentsSystemHealthandStatusDiagnosticReport

ep.jhu.edu
Functional Concept (2 of 6)Functional Hierarchy
11
0.0Transport
Passenger(s)andCargo
1.0PerformLaunch
Operations
2.0ConductFlight
Operations
3.0PerformLanding
Operations
4.0MonitorSystem
HealthandStatus
5.0ExecuteEmergencyOperations
6.0CommunicatewithExternal
Entities
7.0ExecutePassengerCommands
8.0PerformMaintenanceOperations
1.1DetermineLocation
1.2ConfigureforTakeoff
1.3PerformLaunchSystem
Checks
1.4DetermineFlightPlan
1.5ExecuteLaunchingSequence
2.1DetermineLocation
2.2DetectSurroundings
2.3DetermineManeuver
Path
2.4PerformManeuvers
2.5ExecuteManual
Commands
3.1DetermineLocation
3.2ConfigureforLanding
3.3PerformLanding
SystemChecks
3.4ExecuteLandingSequence
3.5ConfigureforTaxiandParking
4.1MeasureSystemStatus
4.2DetermineSystemHealthandStatus
4.3DetectThreats
4.4CounterIntrusions
4.5ReportSystemStatus
5.1EvaluateTypeof
Emergency
5.2GenerateSelf-
Correction/ReconfigurationCommands
5.3GenerateEmergencyCommands
5.4DeploySafetyFeatures
6.1AcquireRFSignals
6.2ConvertAcquiredSignals
6.3OutputCommunications
6.4ConvertInputDatato
Signals
6.5TransmitRFSignals
7.1PowerOnVehicle
7.2AdjustPassengerSeat
Position
7.3AdjustIn-Cabin
Temperature
7.4DisplaySystemStatus
7.5ProcessDestinationAddress
8.1PerformSystemQueries
8.2RunDiagnosticsTesting
8.3ReleaseParts
8.4ReceiveReplacement
Parts
2.6EvaluateCurrentFlight
Status
3.6NavigatetoParkingArea
3.7EngageParking
Mechanisms
3.8PowerDown
7.6PoweronEntertainmentReceivers
7.7AdjustSystemOutput
Volumes
7.8TuneCommunicationsFrequencies
4.6SupplyPower
4.7MaintainInternal
Temperatures
7.9AdjustIn-CabinLighting

ep.jhu.edu
Functional Concept (3 of 6)Top-Level Functional Block Diagram (FBD)
12
Cargo
EnergySource
FederalAviationAgency
Emergency Guidance/CommandingEmergency Notifications/AlertsStandardsandRegulations
OtherAirborneVehicles
EmergencyResponse GPSWeight
Transportation
Environment
Heating/CoolingWeightSupport
TimeandPositionData
NationalWeatherService
CurrentWeatherDataForecastDataWeatherAlerts/Warnings
Maintenance
Replacement ComponentsSystemAdjustmentsSystemQueriesDiagnosticsTests
FailedComponentsSystemHealthandStatus
DiagnosticReport
PositionDataEmergency Notifications/AlertsSystemStatusVoiceCommunications
PositionDataEmergency Notifications/Alerts
SystemStatusVoiceCommunications
PositionDataEmergency Notifications/AlertsSystemStatusVoiceCommunications
ExternalPositionDataEmergency Notifications/Alerts
Emergency Guidance/Commanding
Emergency Guidance/CommandingEmergency Notifications/Alerts
Emergency Aid/Supplies
2.0ConductFlight
Operations
3.0PerformLanding
Operations
4.0MonitorSystem
HealthandStatus
5.0ExecuteEmergencyOperations
6.0CommunicatewithExternal
Entities
7.0ExecutePassengerCommands
8.0PerformMaintenanceOperations
PowerOnDestinationAddressClimateAdjustmentsSeatAdjustmentsDisplaySelectionFrequencyAdjustmentsVolumeAdjustments
Passenger(s)
Emergency Notifications/AlertsSystemStatusVoiceCommunicationsWeatherDataandForecastsRadioBroadcastsEmergency Guidance/Commanding
DisplayQueriesFrequencyAdjustmentsVolumeAdjustmentsPoweronEntertainment Receivers
1.0PerformLaunch
Operations
ValidatedDestinationInput
FlightPlanLaunchStatus
FlightPlanFlightStatus
Emergency Notifications/AlertsSystemHealthandStatus
Emergency Detection
ExhaustEmissionsSensorEmissionsHeat
ExhaustEmissionsSensorEmissions
HeatWeight
ExhaustEmissionsSensorEmissionsHeatWeight
EnvironmentWeather(rain,wind,temperature,
snow,humidity,fog)Altitude
Dust/SandParticlesObstructions
Wildlife
Weather(rain,wind,temperature,snow,humidity,fog)
AltitudeDust/SandParticles
ObstructionsWildlife
Weather(rain,wind,temperature, snow,humidity,fog)AltitudeDust/SandParticlesObstructionsWildlife
Passenger(s)SafetyFeatures
Emergency CommandingSelf-CorrectionCommands
Functions1.0,2.0,3.0
Power
Adversaries/Threats
PhysicalattacksCyberattacksElectronicAttacks(e.g. jamming)
RadioServices
Broadcasts
FederalCommunicationsCommission
FrequencyEmissionStandardsandRegulations
Function4.0
PositionDataSystemMeasurementsSensorMeasurements
WeatherDataForecastDataEmergencyNotifications/AlertsExternalPositionDataEmergencyGuidance/Commanding
Functions1.0,2.0,3.0 WeatherData
ForecastDataEmergencyNotifications/Alerts
VoiceCommunications
Functions1.0,2.0,3.0
ManualFlightCommands
OtherAirborneVehicles
Functions1.0,2.0,3.0
SensorEmissions
SystemHealthandStatus
SystemHealthandStatusDiagnosticResults
SystemQueriesDiagnosticsTest
AllFunctions(except4.0)
SystemAdjustmentsReplacement ComponentsReconfigurationSignals
Functions3.0-7.0
OffSignal
ep.jhu.edu
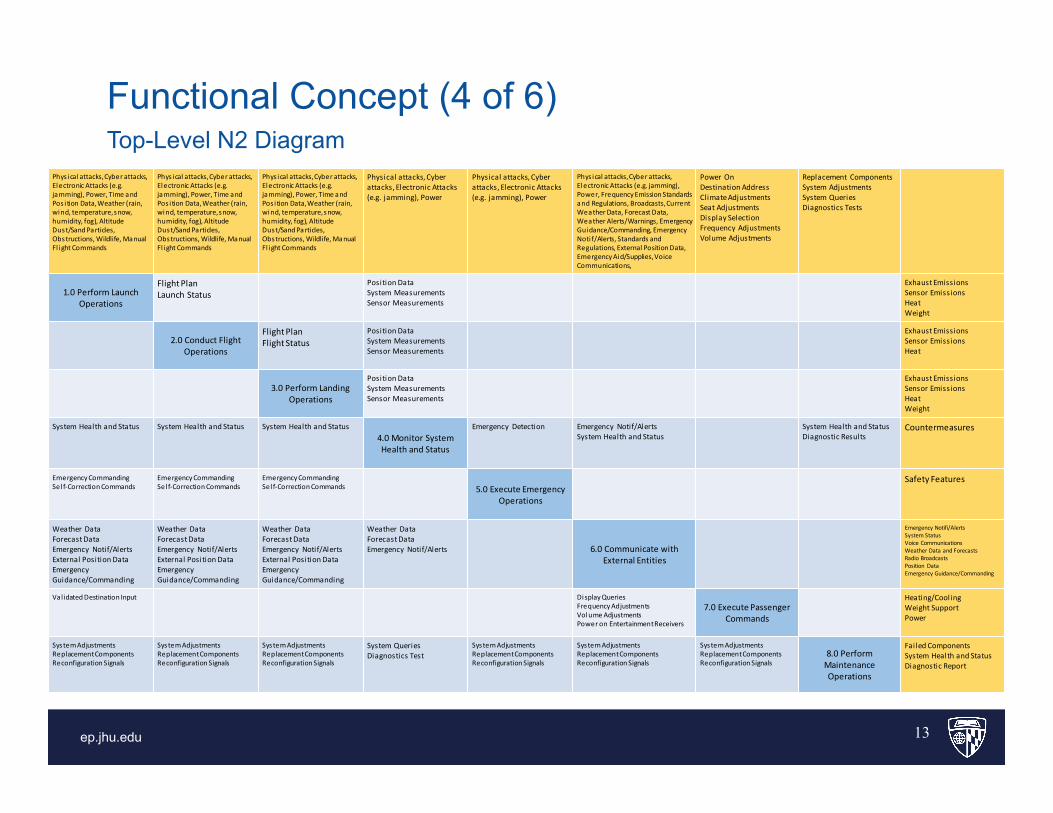
Functional Concept (4 of 6)Top-Level N2 Diagram
13
Phys icalattacks,Cyberattacks,ElectronicAttacks(e.g.jamming),Power,Time andPos i tionData,Weather(rain,wind,temperature,snow,humidity,fog),AltitudeDust/SandParticles,Obstructions,Wildlife, ManualFl ightCommands
Phys icalattacks,Cyberattacks,ElectronicAttacks(e.g.jamming),Power,Time andPos i tionData,Weather(rain,wind,temperature,snow,humidity,fog),AltitudeDust/SandParticles,Obstructions,Wildlife, ManualFl ightCommands
Phys icalattacks,Cyberattacks,ElectronicAttacks(e.g.jamming),Power,TimeandPos i tionData,Weather(rain,wind,temperature,snow,humidity,fog),AltitudeDust/SandParticles,Obstructions,Wildlife,ManualFl ightCommands
Physicalattacks,Cyberattacks,ElectronicAttacks(e.g. jamming),Power
Physicalattacks,Cyberattacks,ElectronicAttacks(e.g. jamming),Power
Phys icalattacks,Cyberattacks,ElectronicAttacks(e.g.jamming),Power, FrequencyEmissionStandardsandRegulations,Broadcasts,CurrentWeatherData,ForecastData,WeatherAlerts/Warnings, EmergencyGuidance/Commanding,EmergencyNoti f/Alerts,StandardsandRegulations,ExternalPositionData,EmergencyAid/Supplies,VoiceCommunications,
PowerOnDestinationAddressClimateAdjustmentsSeatAdjustmentsDisplaySelectionFrequencyAdjustmentsVolumeAdjustments
Replacement ComponentsSystemAdjustmentsSystemQueriesDiagnosticsTests
1.0PerformLaunchOperations
FlightPlanLaunch Status
PositionDataSystemMeasurementsSensorMeasurements
ExhaustEmissionsSensorEmissionsHeatWeight
2.0Conduct FlightOperations
FlightPlanFlightStatus
PositionDataSystemMeasurementsSensorMeasurements
ExhaustEmissionsSensorEmissionsHeat
3.0PerformLandingOperations
PositionDataSystemMeasurementsSensorMeasurements
ExhaustEmissionsSensorEmissionsHeatWeight
SystemHealthandStatus SystemHealthandStatus SystemHealthandStatus4.0Monitor SystemHealthandStatus
Emergency Detection Emergency Notif/AlertsSystemHealthandStatus
SystemHealthandStatusDiagnosticResults
Countermeasures
EmergencyCommandingSel f-CorrectionCommands
EmergencyCommandingSel f-CorrectionCommands
EmergencyCommandingSel f-CorrectionCommands 5.0ExecuteEmergency
Operations
SafetyFeatures
WeatherDataForecastDataEmergency Notif/AlertsExternalPositionDataEmergencyGuidance/Commanding
WeatherDataForecastDataEmergency Notif/AlertsExternalPositionDataEmergencyGuidance/Commanding
WeatherDataForecastDataEmergency Notif/AlertsExternalPositionDataEmergencyGuidance/Commanding
WeatherDataForecastDataEmergencyNotif/Alerts 6.0Communicatewith
ExternalEntities
EmergencyNotifi/AlertsSystemStatusVoiceCommunicationsWeatherDataandForecastsRadioBroadcastsPosition DataEmergencyGuidance/Commanding
Val idatedDestinationInput DisplayQueriesFrequencyAdjustmentsVolumeAdjustmentsPoweronEntertainmentReceivers
7.0Execute PassengerCommands
Heating/CoolingWeightSupportPower
SystemAdjustmentsReplacementComponentsReconfigurationSignals
SystemAdjustmentsReplacementComponentsReconfigurationSignals
SystemAdjustmentsReplacementComponentsReconfigurationSignals
SystemQueriesDiagnosticsTest
SystemAdjustmentsReplacementComponentsReconfigurationSignals
SystemAdjustmentsReplacementComponentsReconfigurationSignals
SystemAdjustmentsReplacementComponentsReconfigurationSignals
8.0PerformMaintenanceOperations
FailedComponentsSystemHealthandStatusDiagnosticReport
ep.jhu.edu
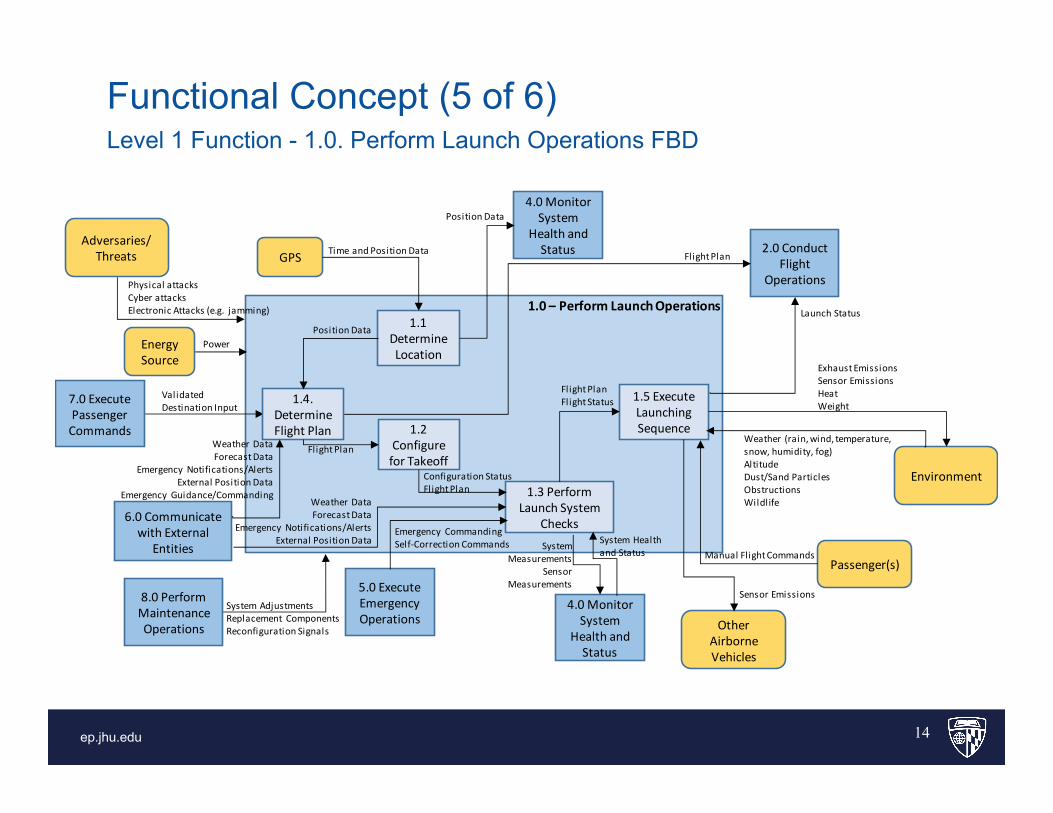
Functional Concept (5 of 6)Level 1 Function - 1.0. Perform Launch Operations FBD
14
1.1DetermineLocation
Environment
2.0ConductFlight
Operations
7.0ExecutePassengerCommands
ValidatedDestinationInput
FlightPlan
ExhaustEmissionsSensorEmissionsHeatWeight
Weather(rain,wind,temperature,snow,humidity,fog)AltitudeDust/SandParticlesObstructionsWildlife
1.2ConfigureforTakeoff
1.3PerformLaunchSystem
Checks
1.4.DetermineFlightPlan
1.5ExecuteLaunchingSequence
PositionData
GPS TimeandPositionData
FlightPlan
ConfigurationStatusFlightPlan
FlightPlanFlightStatus
6.0CommunicatewithExternal
Entities
WeatherDataForecastData
Emergency Notifications/AlertsExternalPositionData
Emergency Guidance/Commanding
1.0– PerformLaunchOperations
OtherAirborneVehicles
SensorEmissions4.0MonitorSystem
HealthandStatus
SystemHealthandStatusSystem
MeasurementsSensor
Measurements
4.0MonitorSystem
HealthandStatus
PositionData
EnergySource
Power
WeatherDataForecastData
Emergency Notifications/AlertsExternalPositionData
5.0ExecuteEmergencyOperations
Emergency CommandingSelf-CorrectionCommands
Passenger(s)ManualFlightCommands
LaunchStatus
Adversaries/Threats
PhysicalattacksCyberattacksElectronicAttacks(e.g. jamming)
8.0PerformMaintenanceOperations
SystemAdjustmentsReplacement ComponentsReconfigurationSignals

ep.jhu.edu
Functional Concept (6 of 6)Traceability
15
§ Traceability was maintained throughout functional analysis
Req_ID Subsystem/Category Description
Type(Binary,
Quantitative,orQualitative)
Verification_Method(I,A,T,or
D)
LinkedFunctions
SA.001 SenseandAvoid
Thesenseandavoidsubsystemshalllocatestationaryobjectswithadetectionrangeofatleast1mile.
Quantitative D Launch:[FUNC_1.5.1.1]DetectSurroundings[FUNC_1.5.2.1]DetermineManeuverPathFlight:[FUNC_2.2]DetectSurroundings[FUNC_2.2.6]DetermineManeuverPathLanding:[FUNC_3.3.5.1]EvaluateGroundSpace[FUNC_3.3.5.2]DetermineLocationwithSufficientSpace
PR.003 Propulsion Thepropulsionsubsystemshallhaveapower-to-weightratioofatleast4kW/kgpermotor.
Quantitative T [FUNC_1.5]ExecuteLaunchingSequence[FUNC_2.4]PerformManuevers[FUNC_3.4]ExecuteLandingSequence[FUNC_3.6]NavigatetoParkingArea
Function_ID Level Function_Name Linking_Req_ID0.0 0 TransportPassenger(s)andCargo1.0 1 PerformLaunchOperations
1.1 2 DetermineLocation[REQ_I.001]Thesystemshalldetermineitslocationwithanaccuracylessthanorequalto0.5metersbasedonsignalsreceivedbyGPS
1.1.1 3 AcquireGPSSignals
[REQ_O.016]ThesystemshallenablecommunicationswithintheUHF(300MHz- 3GHz)frequencyband[REQ_I.001]Thesystemshalldetermineitslocationwithanaccuracylessthanorequalto0.5metersbasedonsignalsreceivedbyGPS[REQ_I.025]Thesystemshallreceivetimingandlocationdatainnearreal-timefromGPSwithintheUHFband(300MHz- 3GHz)
1.1.2 3 ReceiveTimingandLocationData
[REQ_I.001]Thesystemshalldetermineitslocationwithanaccuracylessthanorequalto0.5metersbasedonsignalsreceivedbyGPS[REQ_I.025]Thesystemshallreceivetimingandlocationdatainnearreal-timefromGPSwithintheUHFband(300MHz- 3GHz)
Requirements to Functions Traceability
Functions to Requirements Traceability

ep.jhu.edu
Physical Concept (1 of 5)Top-Level Physical Block Diagram (PBD)
16
2.0PropulsionSubsystem
4.0VehicleStructureSubsystem
6.0Communications
Subsystem
3.0CentralControl
Subsystem
1.0SenseandAvoid
Subsystem
7.0PowerManagementSubsystem
ExternalEntity
RepeatedExternalEntity
InternalEntity
Legend
5.0UserControl
Subsystem
FAA
OtherAirborneVehicles
TwistedPairCables
RFSignals
Environment Atmosphere
ElectricalCables
Passenger(s)UserConsole(DisplayInterface,Switches,Knobs),Comm.Console,FlightControllers
GPSRFSignals,VisibleWaves
Maintenance
TestConsole,TwistedPairCables
TwistedPairCables,Electrical
Cables
CoaxialCables
TwistedPairCables
OtherAirborneVehicles
EmergencyResponse
NationalWeatherService
FederalAviationAgency
RFSignals
RFSignals
RFSignals
RFSignals
Adversaries/Threats
RFSignals
EmergencyResponse
Adversaries/Threats
DirectPhysicalContact
DirectPhysicalContact
Passenger(s)
Cargo
Seating,SafetyFeatures,Convection,LightWaves
Storage
ElectricalCables,TwistedPairCables
AllSubsystems
Housing,Fasteners(bolts,screws),
Environment DirectPhysicalContact
EnvironmentAtmosphere
TwistedPairCables
ElectricalWiring
EnergySources
ChargingCableRadioServices
RFSignals
Maintenance
UserConsole(DisplayInterface,Switches,Knobs),Comm.Console,FlightControllers
DirectPhysicalContact
AutonomousPersonalAirVehicle(APAV)RFSignals
Subsystem5.0
TwistedPairCables

ep.jhu.edu
Physical Concept (2 of 5)Top-Level N2 Diagram
17
RFSignals(positionandweatherdata)VisibleWaves
LocationandTimingDataMaintenanceQueriesMaintenanceTests
Environment(heat,rain,snow,winds,dust,sand,humidity,etc.)PassengerWeightCargoWeightAdversarialAttacks
UserInputCommands(DestinationAddressClimateAdjustmentsSeatAdjustmentsDisplaySelectionFrequencyAdjustmentsVolumeAdjustments)UserFlightCommandsUserVoiceCommunications
RFSignals(BroadcastData,Weather/ForecastData,ExternalEmergency Notif/Alerts,ExternalGuidance/Commanding,ExternalPositionData,ExternalVoiceCommunications)
ElectricalPower/Charge
1.0SenseandAvoidSubsystem
ExternalaircraftpositiondataWeatherdataEO/IRsensordetectionsSenseandavoidcomponentmeasurements
Weight RFSignals(positiondata)
2.0PropulsionSubsystem
Propulsionsubsystemsensormeasurements
Weight HeatThrust
PointingCommandsPower/FrequencyAdjustments
FlightCommands(poweroutput,speed) 3.0CentralControlSubsystem
EmergencyCommandsforsafetyunitsLandinggearcontrolcommandsWing/StabilizerCommandsWeight
SystemStatusEmergencyNotif./AlertsGuidance/Navigation
SystemStatusEmergencyNotif./AlertsLocationData
PowerDistributionCommands
SystemStatusMaintenanceresultsDatalogs/history
Housing/StructuralSupport Housing/StructuralSupport
StructurecomponentmeasurementsHousing/StructuralSupport 4.0VehicleStructure
Subsystem
Housing/StructuralSupport
Housing/StructuralSupport Housing/StructuralSupport
WeightStorageSafetyFeaturesSeatingHeating/CoolingLighting
DataRequests/QueriesFlightCommands
SeatAdjustmentsClimateAdjustmentsWeight 5.0UserControl
Subsystem
UserVoiceCommunicationsTuningAdjustments
PowerOn/OffSignals SystemStatusEmergencyNotif./AlertsGuidance/NavigationUserVoiceSignalsBroadcasts
Comm.ComponentmeasurementsExternalEmergencyNotif./AlertsExternalGuidance/Commanding
Weight ExternalVoiceCommunicationsSignalsBroadcastData 6.0CommunicationsSubsystem
RFSignals(VoiceCommunications,SystemStatus,EmergencyNotif/Alerts,LocationData)
ElectricalPower ElectricalPower ElectricalPower ElectricalPowerWeight
ElectricalPower ElectricalPower 7.0PowerManagementSubsystem
Heat
ep.jhu.edu
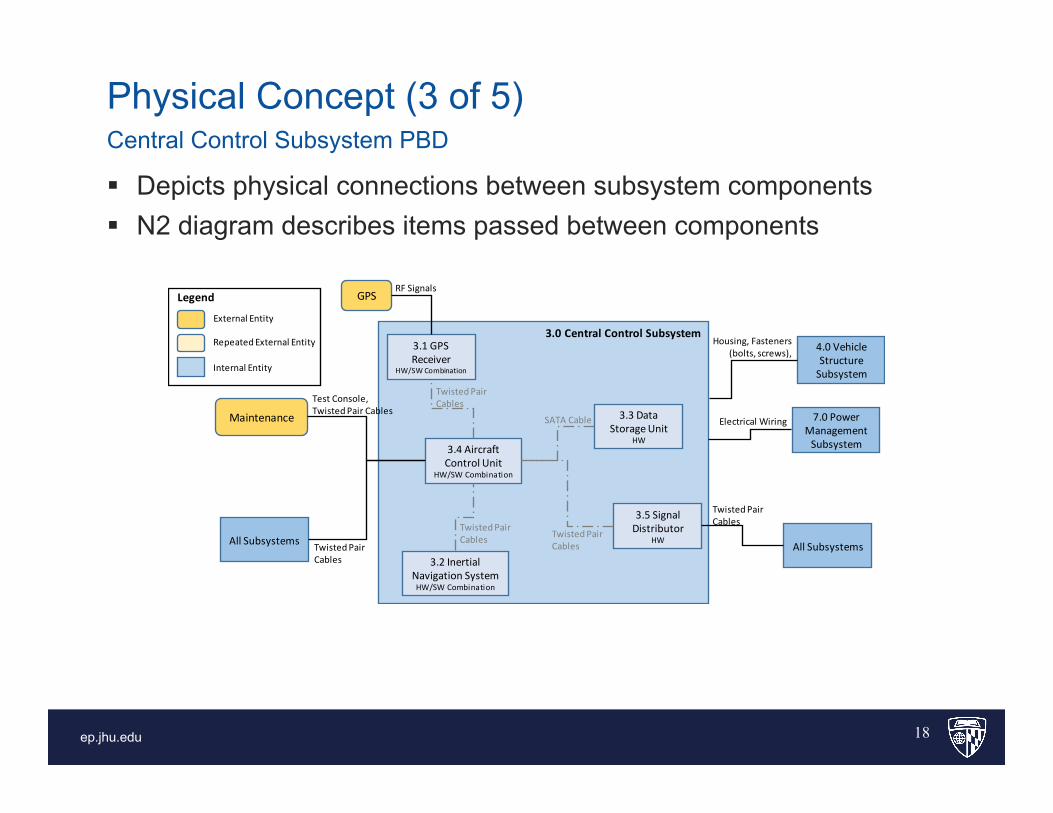
Physical Concept (3 of 5)Central Control Subsystem PBD
18
§ Depicts physical connections between subsystem components§ N2 diagram describes items passed between components
3.0CentralControlSubsystem3.1GPSReceiver
HW/SWCombination
3.2InertialNavigationSystemHW/SWCombination
3.3DataStorageUnit
HW3.4AircraftControlUnit
HW/SWCombination
3.5SignalDistributor
HWTwistedPairCables
RFSignalsGPS
MaintenanceTestConsole,TwistedPairCables
TwistedPairCables
AllSubsystems TwistedPairCables
4.0VehicleStructureSubsystem
7.0PowerManagementSubsystem
Housing,Fasteners(bolts,screws),
ElectricalWiringSATACable
TwistedPairCables AllSubsystems
TwistedPairCables
ExternalEntity
RepeatedExternalEntity
InternalEntity
Legend
ep.jhu.edu
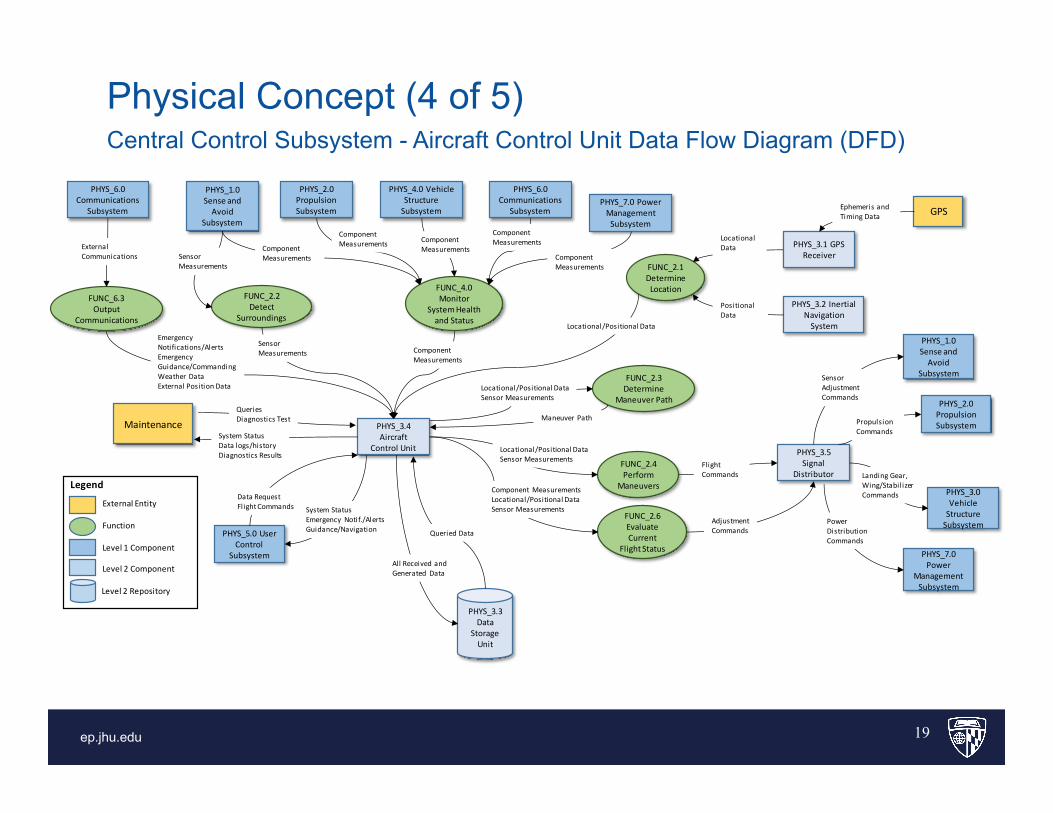
Physical Concept (4 of 5)Central Control Subsystem - Aircraft Control Unit Data Flow Diagram (DFD)
19
PHYS_3.1GPSReceiver
PHYS_3.2 InertialNavigationSystem
PHYS_3.4Aircraft
ControlUnit PHYS_3.5Signal
Distributor
PHYS_1.0SenseandAvoid
Subsystem
Maintenance
GPS
PHYS_2.0PropulsionSubsystem
PHYS_4.0VehicleStructureSubsystem
PHYS_5.0UserControl
Subsystem
PHYS_6.0Communications
SubsystemPHYS_7.0PowerManagementSubsystem
PHYS_3.3Data
StorageUnit
QueriesDiagnosticsTest
DataRequestFlightCommands
EphemerisandTimingData
FUNC_2.1DetermineLocation
LocationalData
PositionalData
FUNC_2.2Detect
Surroundings
FUNC_2.3Determine
ManeuverPath
FUNC_2.4Perform
Maneuvers
FUNC_2.6EvaluateCurrent
FlightStatus
SensorMeasurements
SensorMeasurements
FUNC_4.0Monitor
SystemHealthandStatus
ComponentMeasurements
ComponentMeasurements Component
Measurements
ComponentMeasurements
ComponentMeasurements
ComponentMeasurements
Locational/PositionalData
AllReceivedandGenerated Data
ComponentMeasurementsLocational/PositionalDataSensorMeasurements
FUNC_6.3Output
Communications
PHYS_6.0Communications
Subsystem
ExternalCommunications
EmergencyNotifications/AlertsEmergencyGuidance/CommandingWeatherDataExternalPositionData
Locational/PositionalDataSensorMeasurements
Locational/PositionalDataSensorMeasurements
ManeuverPath
SystemStatusEmergency Notif./AlertsGuidance/Navigation
SystemStatusDatalogs/historyDiagnosticsResults
PHYS_2.0PropulsionSubsystem
FlightCommands
AdjustmentCommands
PropulsionCommands
PHYS_1.0SenseandAvoid
SubsystemSensorAdjustmentCommands
PHYS_3.0VehicleStructureSubsystem
PHYS_7.0Power
ManagementSubsystem
LandingGear,Wing/StabilizerCommands
PowerDistributionCommands
QueriedData
ExternalEntity
Function
Level1Component
Legend
Level2Component
Level2Repository

ep.jhu.edu
Physical Concept (5 of 5)Traceability
20
Req_ID Subsystem/Category Description
Type(Binary,
Quantitative,orQualitative)
Verification_Method
(I,A,T,orD)LinkedPhysicalComponents
SA.001 SenseandAvoid
Thesenseandavoidsubsystemshalllocatestationaryobjectswithadetectionrangeofatleast1mile.
Quantitative D [PHYS_1.1]ADS-B[PHYS_1.2]EO/IRSensors
PR.003 Propulsion Thepropulsionsubsystemshallhaveapower-to-weightratioofatleast4kW/kgpermotor.
Quantitative T [PHYS_2.1]ElectricMotors
P.015 performance Thesystemshallcomputeflightrouteswithin10secondsofreceivingadestinationaddress.
Quantitative D [PHYS_3.4]AircraftControlUnit[PHYS_3.4.3]Microprocessor[PHYS_3.4.3.1]Navigation/GuidanceSoftware
Requirements to Physical Component Traceability
Phys_ID Class Level Component_Name Linking_Req_ID1.0 Subsystem 1 SenseandAvoidSubsystem1.1 Component 2 ADS-B1.1.1 ConfigurationItem 3 ADS-BInReceiver
1.1.1.1 Part 4 Antenna
[REQ_EI.033]Thesystemshallreceiveexternalaircraftpositionaldataandweatherdatafromotherairbornevehiclesandgroundaircontrolstationsat1090MHz.
1.1.1.2 Part 4 SignalProcessor
[REQ_II.001]Thesenseandavoidsubsystemshallsendreceivedexternalaircraftpositiondatatothecentralcontrolsubsystemwithin20millisecondsofreceipt.
Physical Component to Requirements Traceability
§ Traceability was maintained throughout conceptual design

ep.jhu.edu
Trade Study (1 of 6)Introduction and Alternatives
21
§ Trade space existed for the various risk areas of the APAV, requiring the evaluation of alternatives to determine the most feasible and cost-effective solution
§ Formal trade analysis was conducted for the sense and avoid subsystem of the APAV§ Alternatives included:
§ Electro-optical/Infrared (EO/IR) Sensor Package§ Automatic Dependent Surveillance – Broadcast (ADS-B)§ Airborne Sense-and-Avoid (ABSAA) Radar§ Traffic Alert and Collision Avoidance System (TCAS II)
Example ABSAA
Basic ADS-B explanation Basic TCAS II explanation
Example EO/IR Sensor

ep.jhu.edu
Trade Study (2 of 6)Selection Criteria
22
§ Selection criteria was based on the system requirements of the APAV system and these criteria represent the major characteristics for sense and avoid capabilities§ Field of View (FOV) - the observable area of a sensor, broken down by:
§ Azimuth Range - the angle measured between the vehicle direction of travel and the projected line-of-sight (LOS) to the target
§ Minimum Elevation - the angle between the ground and the LOS to the object
§ Detection Range - the furthest distance an object could be detected§ Detection Accuracy - measurement of the error in the detection range§ Weight – weight of the system§ Power – power consumed by the system

ep.jhu.edu
Trade Study (3 of 6)Selection Criteria Traceability
23
Req_ID Description RelatedCriteria
SA.007 Thesenseandavoidsubsystemshallsenseobjectswithinanazimuthrangeofatleast± 90° referencedfromthedirectionoftravel.
AzimuthRange
SA.008 Thesenseandavoidsubsystemshallsenseobjectswithinanazimuthrangeofatleast± 90° referencedfromtheoppositedirectionoftravel.
AzimuthRange
SA.009 Thesenseandavoidsubsystemshallsenseobjectswithinaminimumelevationangleof20° orless. MinimumElevation
SA.001 Thesenseandavoidsubsystemshalllocatestationaryobjectswithadetectionrangeofatleast1mile. DetectionRange
SA.003 Thesenseandavoidsubsystemshalllocatemovingobjectswithadetectionrangeofatleast0.5miles. DetectionRange
SA.005 Thesenseandavoidsubsystemshalltrackmovingobjectswithadetectionrangeofatleast0.5miles. DetectionRange
SA.002 Thesenseandavoidsubsystemshalllocatestationaryobjectswithadetectionrangeaccuracyof+/- 1ftorless. DetectionAccuracy
SA.004 Thesenseandavoidsubsystemshalllocatemovingobjectswithadetectionrangeaccuracyof+/- 1.5ftorless. DetectionAccuracy
SA.005 Thesenseandavoidsubsystemshalltrackmovingobjectswithadetectionrangeaccuracyof+/- 1.5ftorless. DetectionAccuracy
C.012 Thesystemshallhavefulloperations(e.g.takeoff,flight,landing,detecting,communications)whileunderminimumloadingconditions(oneaveragesizedpassengerandnocargo)forarangeofatleast400milesbeforerequiringpowerreplenishment.
Weight
O.013 Thesystemshallhaveanemptyweightofnomorethan2500lbs. Weight
O.014 Thesystemshallhaveamaximumtakeoffweight(includingpassengersandcargo)of3500lbs. Weight
O.012 Thesystemshallhavefulloperations(e.g.takeoff,flight,landing,detecting,communications)whileunderminimumloadingconditions(oneaveragesizedpassengerandnocargo)forarangeofatleast400milesbeforerequiringpowerreplenishment.
Power
PR.001 Thepropulsionsubsystemshalloutputpowerofatleast260kWpermotor. Power

ep.jhu.edu
Trade Study (4 of 6)Criteria Weighting
24
§ Normalized criteria weights were generated by following the Nth-root Pair-wise comparison method
Value Meaning Definition1 EqualImportance Bothalternativescontributeequally totheobjective
3 ModerateImportance Experienceandjudgement giveaslightedge toonealternative
5 Strong Importance Experienceandjudgement strongly favoronealternative
7 VeryStrongImportance
Activity strongly favoredanditsdominance isdemonstrated inpractice
9 AbsoluteImportance Evidence favoringonealternativeishighestpossible
FOV(azim
uthrange)
FOV(m
inelevatio
n)
DetectionRa
nge
DetectionAccuracy
Weight
Power Row
ValueProducts
NthrootofRowValue
Products
NormalizedWeightingFactor
FOV(azimuth range) 1 1 2 2 3 3 36 1.817 0.269FOV(minelevation) 1 1 2 2 3 3 36 1.817 0.269DetectionRange 0.5 0.5 1 2 2 2 2 1.122 0.166
DetectionAccuracy 0.5 0.5 0.5 1 2 2 0.5 0.891 0.132Weight 0.333 0.333 0.5 0.5 1 0.5 0.013889 0.490 0.073Power 0.333 0.333 0.5 0.5 2 1 0.055556 0.618 0.091
Sum: 6.756 1.000

ep.jhu.edu
Trade Study (5 of 6)Utility Curves
25
§ Utility functions used to translate an alternative’s raw score against a criterion to a utility score
§ Curves developed according to independent research and assumed to be linear
ep.jhu.edu
Trade Study (6 of 6)Results
26
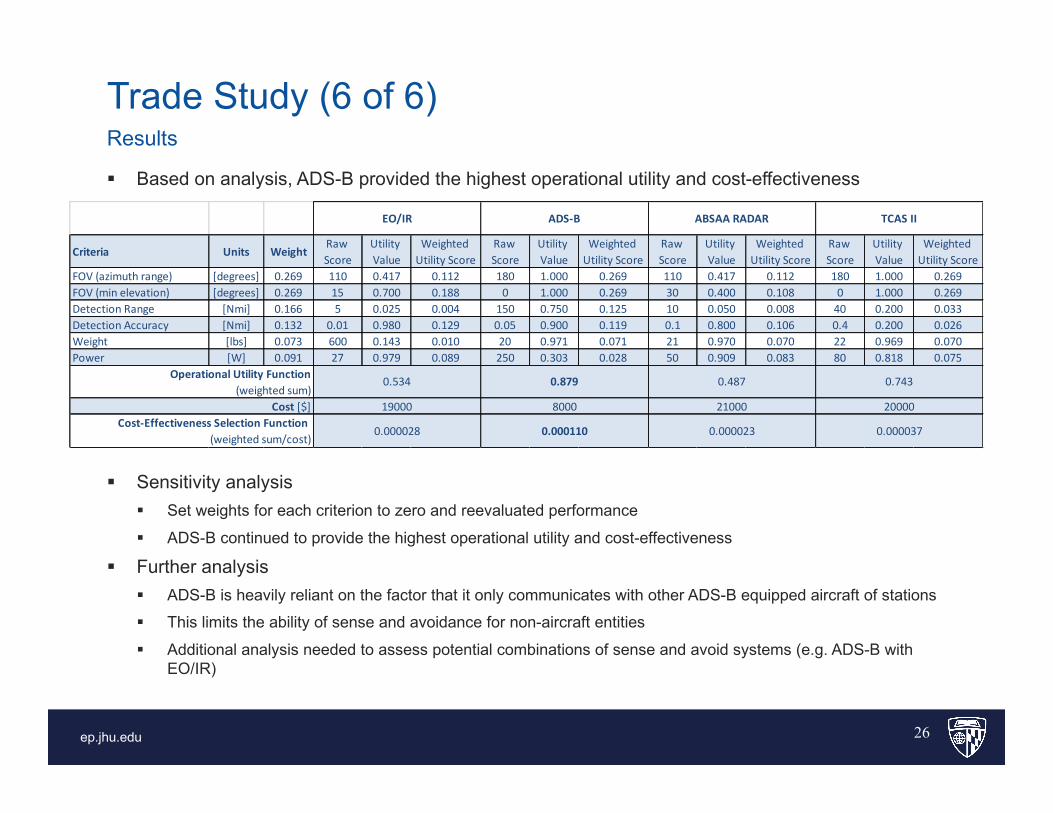
§ Based on analysis, ADS-B provided the highest operational utility and cost-effectiveness
§ Sensitivity analysis§ Set weights for each criterion to zero and reevaluated performance
§ ADS-B continued to provide the highest operational utility and cost-effectiveness
§ Further analysis§ ADS-B is heavily reliant on the factor that it only communicates with other ADS-B equipped aircraft of stations§ This limits the ability of sense and avoidance for non-aircraft entities
§ Additional analysis needed to assess potential combinations of sense and avoid systems (e.g. ADS-B with EO/IR)
Criteria Units WeightRawScore
UtilityValue
WeightedUtilityScore
RawScore
UtilityValue
WeightedUtilityScore
RawScore
UtilityValue
WeightedUtilityScore
RawScore
UtilityValue
WeightedUtilityScore
FOV(azimuthrange) [degrees] 0.269 110 0.417 0.112 180 1.000 0.269 110 0.417 0.112 180 1.000 0.269FOV(minelevation) [degrees] 0.269 15 0.700 0.188 0 1.000 0.269 30 0.400 0.108 0 1.000 0.269DetectionRange [Nmi] 0.166 5 0.025 0.004 150 0.750 0.125 10 0.050 0.008 40 0.200 0.033DetectionAccuracy [Nmi] 0.132 0.01 0.980 0.129 0.05 0.900 0.119 0.1 0.800 0.106 0.4 0.200 0.026Weight [lbs] 0.073 600 0.143 0.010 20 0.971 0.071 21 0.970 0.070 22 0.969 0.070Power [W] 0.091 27 0.979 0.089 250 0.303 0.028 50 0.909 0.083 80 0.818 0.075
TCASII
0.743
20000
0.000037
OperationalUtilityFunction(weightedsum)
Cost[$]Cost-EffectivenessSelectionFunction
(weightedsum/cost)
EO/IR ADS-B ABSAARADAR
0.534 0.879 0.487
19000 8000 21000
0.000028 0.000110 0.000023
ep.jhu.edu
Risk Management (1 of 3)Approach
27
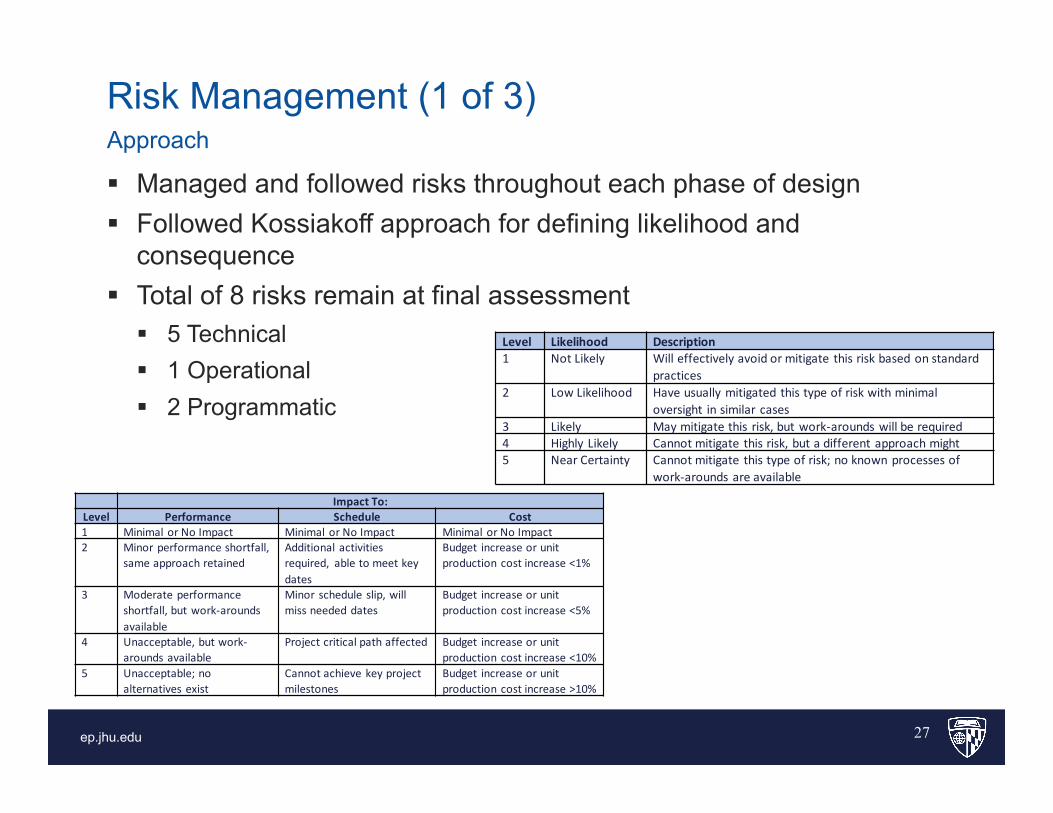
§ Managed and followed risks throughout each phase of design§ Followed Kossiakoff approach for defining likelihood and
consequence § Total of 8 risks remain at final assessment
§ 5 Technical§ 1 Operational§ 2 Programmatic
Level Likelihood Description1 NotLikely Willeffectivelyavoidormitigate thisriskbasedonstandard
practices2 LowLikelihood Haveusuallymitigated thistypeofriskwithminimal
oversight insimilarcases3 Likely Maymitigatethis risk,butwork-aroundswillberequired4 HighlyLikely Cannotmitigate thisrisk,butadifferentapproachmight5 NearCertainty Cannotmitigate thistypeofrisk;noknownprocessesof
work-aroundsareavailable
ImpactTo:Level Performance Schedule Cost1 MinimalorNoImpact MinimalorNoImpact MinimalorNoImpact2 Minorperformanceshortfall,
sameapproachretainedAdditionalactivitiesrequired, abletomeetkeydates
Budget increaseorunitproductioncostincrease<1%
3 Moderateperformanceshortfall,butwork-aroundsavailable
Minorscheduleslip,willmissneededdates
Budget increaseorunitproductioncostincrease<5%
4 Unacceptable,butwork-aroundsavailable
Projectcriticalpathaffected Budget increaseorunitproductioncostincrease<10%
5 Unacceptable;noalternativesexist
Cannotachievekeyprojectmilestones
Budget increaseorunitproductioncostincrease>10%

ep.jhu.edu
Risk Management (2 of 3)Risk Overview
28
RiskID Type Title RiskStatement RiskDescription
Initial
Likelih
ood
Initial
Conseq
uence
Fina
lLikelih
ood
Fina
lCo
nseq
uence
R-001 T ImmatureElectronicFlightTechnologies
Ifcurrentelectronicpowersourcetechnologiesareinsufficienttosupportalloperationsofapassengeraircraft,thenthesystemmaybeunabletomeetdesiredemissionsstandardsandchangestothesystemdesignwillbeincurred.
Autonomousflighttechnologies,letalonefully-electronicautonomousflighttechnologiesarestillrelativelynewadvancedconceptsintoday'sindustry.Currenttechnologiesmaynotbesufficientinbeingabletodeployafullyelectricautonomouspassengeraircraft.
4 4 2 4
R-002 T In-FlightCollision
Ifautonomousavoidancetechnologiesareimmatureandunabletoproperlyoperateinvariousenvironmentalconditions(day,night,rain,snow,winds),thentheAPAVwillbeunabletoprovidefullautonomyandsafetytothepassengers.
Autonomousaircraftfacethepotentialofcollidingwithotherairborneobjectssuchasbirds,drones,orotherdebris.Ifanobjectcollideswiththesystem,itmaycauseasystemfailure,posingathreattothepassenger(s).
3 4 2 3
R-003 T CyberAttacksIfprotectiveandreliablenetworksecurityisnotimplementedacrossthesystem,thencyberattackscouldresultinlossofflightcontrol,lossofcommunications,andviolationofpassengersafety.
TheAPAVcontainsseveralexternalfacinginterfaceswhichcanbetargetedbycyberattacks,orotherformsofelectronicattacks(i.e.jamming).
3 5 1 4
R-004 O ElectronicAttacks
Ifelectronicattacks(e.g.jamming)aresuccessfulagainsttheAPAV,thenthesystemwillbeunabletoestablishstablecommunicationslinkswithexternalentities,leadingtoadverseimpactsonsafetyandawareness.
TheAPAVcontainsseveralexternalfacinginterfaceswhichcanbetargetedbycyberattacks,orotherformsofelectronicattacks(i.e.jamming).Successfulattackscanresultinlossofpositionaldata,lossofcommunications,andreducedsafety.
3 4 1 4
R-005 T Modularity/StandardizationIfcomponentswithinthesystemarenon-standardandunique,thenthesystemwillhavelessmodularityandrequirespecializedtoolsandhighermaintenancedetail.
TheAPAVisarelativelynewconceptwhichmayutilizenewertechnologies.Usingnewtechnologiesposesariskthatnon-standardizedpartsareusedandspecializedequipmentwillberequiredforproductionandmaintenance.
3 3 1 2
R-006 T ConstrainingPolicies,Standards,&Regulations
IfcurrentFAApoliciesandstandardsposeoverlyconstrainingrequirements,theAPAVdesignmaybeconstrainedtocertainimplementationsordesigns.
Duetothenewconceptofautonomousairtransportation,policies,standards,andregulationstomanagepersonalautonomousaircraftmaynotbefullydevelopedorinplace.Existinggovernancemaybetoorestrictiveand/ornewgovernancemayneedtobedevelopedinordertoaccommodatethisconcept.
3 4 1 4
R-007 P SocietalShifttoConcept Ifthesystemisunabletogainsocietalapprovalandtrust,thencontinueddevelopmentandproductionofthesystemwillcease.
Beinganewerconcept,electronicautonomousaircraftmayposeaffordabilityconcernstothepublic.Additionally,societymayhavedifficultytrustingthesafetyoftheautonomousaircraftandmaythereforerejectthissystem.
4 5 1 5
R-008 P On-timecompletionofCapstoneProject
Ifpersonaltasks(e.g.work,travel)takeupmoretimethananticipated,thenthecompletionofdeliverableswillbedelayed.
Giventhelargetimecommitmentofthisprojectandthecombinationofbusynessinpersonallife,Imaynotbeabletoachieveallmilestonesintheintendedtimeframe.Additionally,giventhatIhavenotgainedapprovalofmyproposalpriortothestartofthesemester,myschedulehasalreadybeensetback.
2 4 1 4

ep.jhu.edu
Risk Management (3 of 3)Risk 001 (Immature Electronic Flight Technologies) Review
29
RiskID:R-001RiskTitle:ImmatureElectronicFlightTechnologiesRiskType:Technical
RiskStatement:Ifcurrentelectronicpowersourcetechnologiesareinsufficienttosupportalloperationsofapassengeraircraft,thenthesystemmaybeunabletomeetdesiredemissionsstandardsandchangestothesystemdesignwillbeincurred.RiskDescription:Autonomousflighttechnologies,letalonefully-electronicautonomousflighttechnologiesarestillrelativelynewadvancedconceptsintoday'sindustry.Currenttechnologiesmaynotbesufficientinbeingabletodeployafullyelectricautonomouspassengeraircraft.
InitialLikelihood:4InitialConsequence:4CurrentLikelihood:2CurrentConsequence:4
Dec2018Aug2018 Sep2018 Oct2018 Nov2018
1
2 3
5
4
MitigationPlan:1. Conductresearchoncurrentlyavailableelectricaircrafttechnology2. Performtradeanalysistoidentifyfeasiblepowersourceoptionsforafully-electricpassengeraircraft3. Identifypotentialalternativestofully-electricpowersources(e.g.hybrid)4. Performadditionaltradeanalysistodeterminebestoverallsolutionforthepowersource.5. Designanddevelopmostfeasiblesolutiontomeetperformanceobjectivesandsafety
FurtherAssessment:Atthispointinthesystemdevelopment,tradestudieshavebeencarriedoutandafeasibleelectricpowersourcealternative hasbeenidentifiedtopowertheAPAV.Followingthetradestudies,requirementsweredevelopedcapturethesealternativesandensuretheproperdevelopmentofthepowersource.
1 2 3 4 5
5
4
3
2
1
ConsequenceRating
Likelihoo
d
1
4
2/3
5
ep.jhu.edu
Test Plan (1 of 2)
30
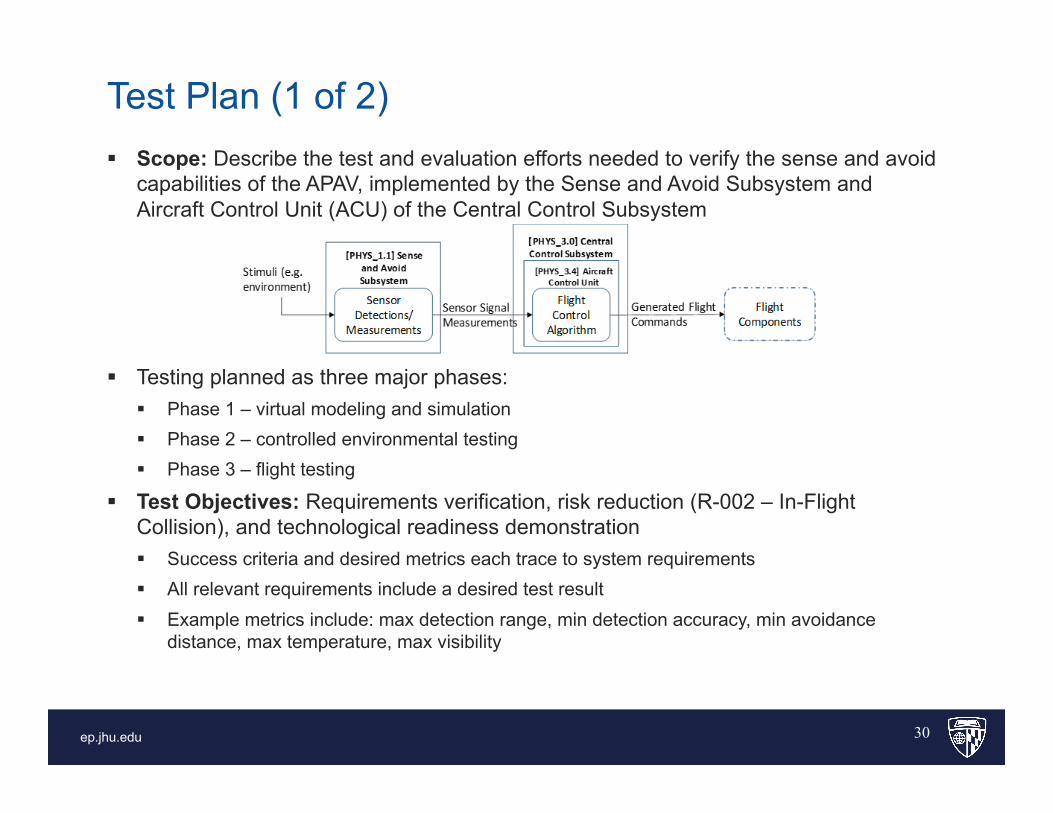
§ Scope: Describe the test and evaluation efforts needed to verify the sense and avoid capabilities of the APAV, implemented by the Sense and Avoid Subsystem and Aircraft Control Unit (ACU) of the Central Control Subsystem
§ Testing planned as three major phases:§ Phase 1 – virtual modeling and simulation§ Phase 2 – controlled environmental testing§ Phase 3 – flight testing
§ Test Objectives: Requirements verification, risk reduction (R-002 – In-Flight Collision), and technological readiness demonstration§ Success criteria and desired metrics each trace to system requirements§ All relevant requirements include a desired test result§ Example metrics include: max detection range, min detection accuracy, min avoidance
distance, max temperature, max visibility

ep.jhu.edu
Test Plan (2 of 2)
31
§ Test Environment: § Phase 1: Virtual environment, integrated development
environment (IDE)§ Phase 2: Environmental testing facility (e.g. McKinley
Climatic Laboratory)§ Phase 3: Controlled live operational environment
§ Test Equipment§ Phase 1: Computers, power supplies§ Phase 2: Weather simulators (e.g. wind, temperature, humidity, rain, snow, fog, etc.), stress
sensors (e.g. load sensor, thermometers, hygrometer, barometer), computers, detection entities, artificial signal generators, control stations, power supplies
§ Phase 3: ADS-B Out transmitters, artificial obstacles (air and ground), safety equipment (guards, nets), ground control station
§ Test Articles and Subjects§ ADS-B, EO/IR Sensors, Sensor Component Detectors,
ACU, APAV Prototype§ Flight Control S/W Developer, Senior Design Engineer,
T&E Analyst, Flight Operator, Development Technician, Emergency Response
Virtual Simulation Example
McKinley Climatic Lab F-22 Test

ep.jhu.edu
System Specification (1 of 2)Requirements Summary
32
§ Total of 216 requirements§ ~76% increase in requirements since the completion of the
Requirements Analysis Report (RAR) § Requirements added, modified, and deleted throughout the course of the
system development§ Maintained traceability throughout each phase
§ 81% of requirements are quantitative as compared to 62% at the completion of the RAR
Total Quantitative % Quantitative Binary QualitativeRequirements Analysis Report 123 76 62% 31 16Functional Analysis Report 145 91 63% 37 17Trade Study 149 95 64% 37 17Conceptual Design Report 155 101 65% 37 17Test Plan 155 102 66% 37 16System Specifications 216 176 81% 40 0

ep.jhu.edu
System Specification (2 of 2)Key Performance Parameters (KPPs)
33
Req_ID Description Rationale
Type(Binary,
Quantitative,orQualitative)
VerificationMethod
(I,A,T,orD)
C.001 Thesystemshallhaveanoperationalavailabilityofatleast0.9999. Usersexpectahighlevelofsystemeffectivenessandhaveaneedforthesystemtobereadilyavailableasatransportvehicle.
Quantitative A
C.002 ThesystemshallhaveaMeanTimeToFailure(MTTF)ofatleast400,000traveledmiles.
Roadvehiclestypicallylastaround200,000miles.GiventhesystemtravelsthroughairtheMTTFwasdeterminedtobehigher.MTTFmeasuredinunitsofmilestraveledinsteadoftime.
Quantitative A
C.003 Thesystemshallhaveafaultdetectionrateofatleast99%. Safetyisalargeconcerntocommuters;theautonomyofthevehiclemustalsoincludeself-detectionofanomalies.
Quantitative T
F.001 Thesystemshallconductfullyautonomoussense,avoid,andmaneuveringduringflightthroughdayandnightconditions.
AmainobjectiveoftheAPAVistoprovideautonomyandminimizetheneedforhumancontribution.Thesystemshouldbeoperableindayornightconditions.
Binary D
F.009 Thesystemshalltransportpassengersandcargowithtraveltimesatleast20%fasterthanapersonalroadvehiclewouldachieveoverthesamedistance.
Amajorobjectiveofthesystemistoprovideafastermodeoftransportationtocommuters.
Quantitative A
P.014 Thesystemshalldeployemergencysafetyfeatureswithin0.1secondsofdetectingacriticalfault.
Safetyisalargeconcerntocommuters;safetyfeaturesmustbepresenttokeepinjuriesataminimum.
Quantitative D
O.012 Thesystemshallhavefulloperations(e.g.takeoff,flight,landing,detecting,communications)whileunderminimumloadingconditions(oneaveragesizedpassengerandnocargo)forarangeofatleast400milesbeforerequiringpowerreplenishment.
Asanairvehicle,thissystemisexpectedtoprovideatleastthesamerangeasatypicalroadvehicleononetankofgas(averagetanksizeis16gallonsandaveragempgis24.7)
Quantitative D
O.020 Thesystemshallenableoperationsundervariousenvironmentalconditions,toinclude:i.Altitudesrangingfromatleast0to40,000ft abovesealevelii.Rainfallofatleastmoderateintensity(0.4inchesperhour)iii.Temperaturesrangingfromatleast-20°Fto130°Fiv.Humidityrangingfrom0%to100%v.SnowfallofatleastCategory1ontheNESISscale(byNOAA)vi.Windsuptoatleast50knots,steadywinds up toatleast40knots,
andgustspreadsuptoatleast15knotsvii.Visibilities of0.5statutemilesorlessduringthedayviii.Visibilitiesof1statutemileorlessduringthenightix.Sandanddustconcentrationsofatleast0.5gramspermeterscubed
Airtravelissubjecttovariousenvironmentalconditionsandthesystemshouldbeabletoprovideavailabilitytothecommutersthroughthesevariousconditions.
Quantitative D
ep.jhu.edu
Summary of Final Concept and Further Work
34
§ User Needs and independent research served as the basis for the system development
§ Additional review from subject matter experts (SMEs) are needed§ Recommend the following next steps:
§ Perform additional formal trade analysis of:§ Propulsion Subsystem motors§ Power Management Subsystem batteries§ Vehicle Structure Subsystem safety features
§ Develop high-level cost estimations for projected development and manufacturing costs
§ Conduct system reviews for each major phase (based on DoD readiness events)§ System Requirements Review (SRR)§ System Functional Review (SFR)§ Preliminary Design Review (PDR)

ep.jhu.edu
Lessons Learned
35
§ Be consistent with tracking and assessing schedule§ Include extra time buffers in your schedule§ Learn a Systems Engineering tool (e.g. CORE)
§ A lot of time was spent on manually tracing between requirements, functions, and physical components
§ Much time was also spent looking for places where updates/modifications needed to be carried over
§ Systems Engineering is a team effort§ Practice proper configuration management (version control)
§ The iterative nature of SE results in many changes which should be documented for reference

ep.jhu.edu
Recommendations
36
§ If possible, consider offering an elective which teaches the use of System Engineering tools (e.g. CORE, DOORS)§ This may give students more incentive to use these tools for this course§ These tools may help students maintain consistency and traceability, as
well as improve the overall quality of work§ Send reminders to keep students motivated and thinking about this
course prior to enrolling§ Access to blackboard site is given while taking the 5th core course
(typically the mid-point of the program for most), but then the capstone course was never mentioned again
§ Getting the proposal done prior to the beginning of the course gives students more time to work on the other deliverables

ep.jhu.edu
Questions?
37

ep.jhu.edu
References
38
§ ADS-B Technologies LLC. (2018). What is ADS-B? Retrieved December 1, 2018 from website: http://www.ads-b.com/
§ Designboom. (2018). Researchers Test Cars and Planes in Extreme Weather Conditions Inside Lab. Retrieved November 4, 2018 from website: https://www.designboom.com/technology/mckinley-climatic-laboratory-07-27-2017/
§ Desjardins, J. (2018). Visualizing the Average Commute Time in U.S. States and Cities. Visual Capitalist. Retrieved August 20, 2018, from website: http://www.visualcapitalist.com/average-commute-u-s-states-cities/
§ Dronelife. (2015). NASA to Test Sense-and-Avoid Technology for Drones. Retrieved November 4, 2018 from website: https://dronelife.com/2015/06/29/nasa-to-test-sense-and-avoid-technology-for-drones/
§ Ingraham, C. (2017). The American Commute is Worse Today Than its Ever Been. Washington Post. Retrieved August 20, 2018, from website: https://www.washingtonpost.com/news/wonk/wp/2017/02/22/the-american-commute-is-worse-today-than-its-ever-been/?utm_term=.2307886f0a28
§ Kossiakoff, A. (2011). Systems Engineering Principles and Practice. Second Edition. John Wiley & Sons.
§ NAVSEA (2017). NSWC Crane Hosts Surface Electro-Optics/Infrared (EO/IR) Standards Profile Review. Retrieved December 1, 2018 from website: https://www.navsea.navy.mil/Media/News/Article/1243556/nswc-crane-hosts-surface-electro-opticsinfrared-eoir-standards-profile-review/
§ Traffic Avoidance Collision System. (2018). Wikipedia. Retrieved December 1, 2018 from website: https://en.wikipedia.org/wiki/Traffic_collision_avoidance_system
§ Union of Concerned Scientists (UCS). (2018). Car Emissions & Global Warming. Retrieved August 20, 2018 from website: https://www.ucsusa.org/clean-vehicles/car-emissions-and-global-warming#.W3tlm-hKhPY

















