University of Groningen Interface and surface roughness of polymer-metal laminates van Tijum, Redmer IMPORTANT NOTE: You are advised to consult the publisher's version (publisher's PDF) if you wish to cite from it. Please check the document version below. Document Version Publisher's PDF, also known as Version of record Publication date: 2006 Link to publication in University of Groningen/UMCG research database Citation for published version (APA): van Tijum, R. (2006). Interface and surface roughness of polymer-metal laminates. s.n. Copyright Other than for strictly personal use, it is not permitted to download or to forward/distribute the text or part of it without the consent of the author(s) and/or copyright holder(s), unless the work is under an open content license (like Creative Commons). The publication may also be distributed here under the terms of Article 25fa of the Dutch Copyright Act, indicated by the “Taverne” license. More information can be found on the University of Groningen website: https://www.rug.nl/library/open-access/self-archiving-pure/taverne- amendment. Take-down policy If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. Downloaded from the University of Groningen/UMCG research database (Pure): http://www.rug.nl/research/portal. For technical reasons the number of authors shown on this cover page is limited to 10 maximum. Download date: 29-11-2021
Transcript
University of Groningen
Interface and surface roughness of polymer-metal laminatesvan Tijum, Redmer
IMPORTANT NOTE: You are advised to consult the publisher's version (publisher's PDF) if you wish to cite fromit. Please check the document version below.
Document VersionPublisher's PDF, also known as Version of record
Publication date:2006
Link to publication in University of Groningen/UMCG research database
Citation for published version (APA):van Tijum, R. (2006). Interface and surface roughness of polymer-metal laminates. s.n.
CopyrightOther than for strictly personal use, it is not permitted to download or to forward/distribute the text or part of it without the consent of theauthor(s) and/or copyright holder(s), unless the work is under an open content license (like Creative Commons).
The publication may also be distributed here under the terms of Article 25fa of the Dutch Copyright Act, indicated by the “Taverne” license.More information can be found on the University of Groningen website: https://www.rug.nl/library/open-access/self-archiving-pure/taverne-amendment.
Take-down policyIf you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediatelyand investigate your claim.
Downloaded from the University of Groningen/UMCG research database (Pure): http://www.rug.nl/research/portal. For technical reasons thenumber of authors shown on this cover page is limited to 10 maximum.
where ( , )g r ε is the height difference squared between 2 arbitrary surface points located
in a horizontal plane at a distance r from each other. In general, the maximum
resolution of a measurement technique defines the lower bound for r . Therefore the
minimum average height difference for the shortest distance minr can be defined as
min( , )g r ε and the relative surface area is described as:
Roughness and adhesion
111
2
min min
min
( , )real
nom
r g rA
A r
ε+= , (6.4)
where nom
A is the nominal area. For r ξ� eq. (6.3) can be approximated by
2 ( )
2 ( )( , ) | 2 ( )
( )
H
r
rg r w
ε
ξ
εε ε
ξ ε
=
�
. (6.5)
In general minr is much smaller than ξ and therefore eq. (6.4) can be rewritten as:
2
2( ( ) 1)
min2 ( )
2 ( )1
( )
Hreal
H
nom
A wr
A
ε
ε
ε
ξ ε−= + . (6.6)
When we take minr equal to unity, the relative surface area becomes
2 2 ( )1 2 ( ) ( ) Hreal
nom
Aw
A
εε ξ ε −= + . (6.7)
Fig. 6.1 shows the influence of H on the relative surface area. For a small H , an
extremely rough surface will appear, which has nearly twice the surface area of a flat
surface. For larger values of H , the increase in relative surface area is not so dramatic.
0.0 0.5 1.0 1.5 2.0 2.5 3.01.0
1.2
1.4
1.6
1.8
Re
lative
su
rfa
ce
are
a [-]
w [a.u.]
Fig. 6.1. Relative surface area as a function of the root-mean-square roughness w with ξ =
30 and different Hurst exponents: ( ⋅ ⋅ ) H = 0.3, ( -- ) H = 0.6 and ( − ) H = 0.9.
Chapter 6
112
6.3 Pull-off test
6.3.1 Constitutive model
Fig. 6.2 shows a schematic of the axisymmetrical pull-off test used. The axisymmetry is
indicated in the figure by the symmetry axis and is parallel to the loading direction. The
thickness of the polymer layer is 40 µm. Two cylindrical metal plates of 20 µm thick
and radius 2049 µm enclose the polymer. Due to the symmetry only half of this system
has to be modeled. A cohesive zone is placed between the metal and the polymer. The
polymeric and metal descriptions are based on quadrilaterals. In the model the size of
these cells is set to 1 µm x 1 µm for a flat interface.
The algorithm described in chapter 2 is used to generate self-affine rough interfaces.
These interfaces are implemented as a cohesive zone [13] in a finite element model [14]
(see chapter 2 and 5). This specific cohesive zone definition is chosen, because large
fluctuations on the surface will cause shear deformation and fracture instead of only
normal fracture. The coupling between shear and normal tractions makes it therefore
suitable for our system.
As a material system chromium-plated steel with a glycol modified polyethylene
terephthalate (PETG) coating was chosen. The stress-strain response of the PETG [15,
[16] was used. The modeled stress-strain behavior of the polymer is shown in Fig. 6.3.
Further a hypothetical polymer is displayed with similar properties. The primary
difference is that it has one half the Young’s modulus of PETG.
Fig. 6.2. Schematic cross-sectional representation of the finite element model. The model consists of two identical rough metal disks, which are glued together with polymer.
Fig. 6.3. Stress-strain response of (-) PETG and the (--) hypothetical polymer.
6.3.2 Determination of the cohesive zone parameters
For the determination of the shear and normal response of the cohesive zone peel-tests
were performed. For this test we used a tensile stage inside an environmental scanning
Roughness and adhesion
113
electron microscope (ESEM). In an ESEM it is possible to prevent charging of the
deformed polymer by introducing small amounts of water as charge carrier. From the
ESEM observations, i.e. from both plane and cross-sectional view (Fig. 6.4) we were
able to estimate the shape of the necking of the polymer coating. The opening angle at
the crack-tip was 20 degrees. The peel-tests were performed at 0 degrees, which means
fully under an applied shear force. Due to necking of the polymer the opening angle of
the crack-tip was around 20 degrees instead of 0 degrees. By performing several plane-
strain simulations with different shear to normal ratios we were able to reach agreement
with the experiment (Fig. 6.5).
Fig. 6.6. Response of the used cohesive zone: - normal traction; -- shear traction; .- normal traction at maximum shear stress; .. shear traction at maximum normal stress.
The determined cohesive zone had the characteristics shown in Fig. 6.6. The graph
explains the relationship between the normal and the shear traction. Due to loading the
Fig. 6.4. Environmental scanning electron microscopy image during a zero degrees peel-test.
Fig. 6.5. Simulation of a 30 µm thick coating during a 0 degrees peel-test.
Chapter 6
114
traction-separation law will result in a combination of opening and shearing (see also
chapter 4). When large shear traction is applied, the maximum normal traction is
reduced and vice versa. It is important to emphasize that normal and shear traction are
coupled.
6.3.3 Numerical experiment
During an experimental pull-off test the load increases until fracture occurs. At that
point the loading curve drops towards zero. In the model this instability occurs as well.
In Fig. 6.7 an example of the force-displacement curve is shown together with the
deformed mesh at maximum stress. During the displacement controlled test cohesive
zone elements start to fracture (the stress in the cohesive zone element has passed the
maximum value). Then, less cohesive zone elements have to carry the still increasing
global stress, which results in an increase in the number of fractured elements. In
experiments and in the numerical approach this fracture process is instable. In Fig. 6.6,
the cohesive zone is well defined for all displacements. Consequently, cohesive zone
elements can still carry load after reaching a certain maximum stress level. Therefore it
is quite well possible to determine the maximum stress level (in Fig. 6.7 expressed with
■).
Fig. 6.7. Stress displacement curve for w = 3; ξ = 29 and H = 0.6. The squares denote at
which stress the deformed mesh in the inset is taken.
6.3.4 Results of the pull-off test
We will present the mechanical performance for three different Hurst H exponents (0.3,
0.6 and 0.9) and rms roughness of 3 µm. For each H various surfaces with different
lateral correlation lengths ξ are created. Each of these surfaces were used in the finite
element model and resulted in a maximum stress. Fig. 6.8 shows that a system with
Roughness and adhesion
115
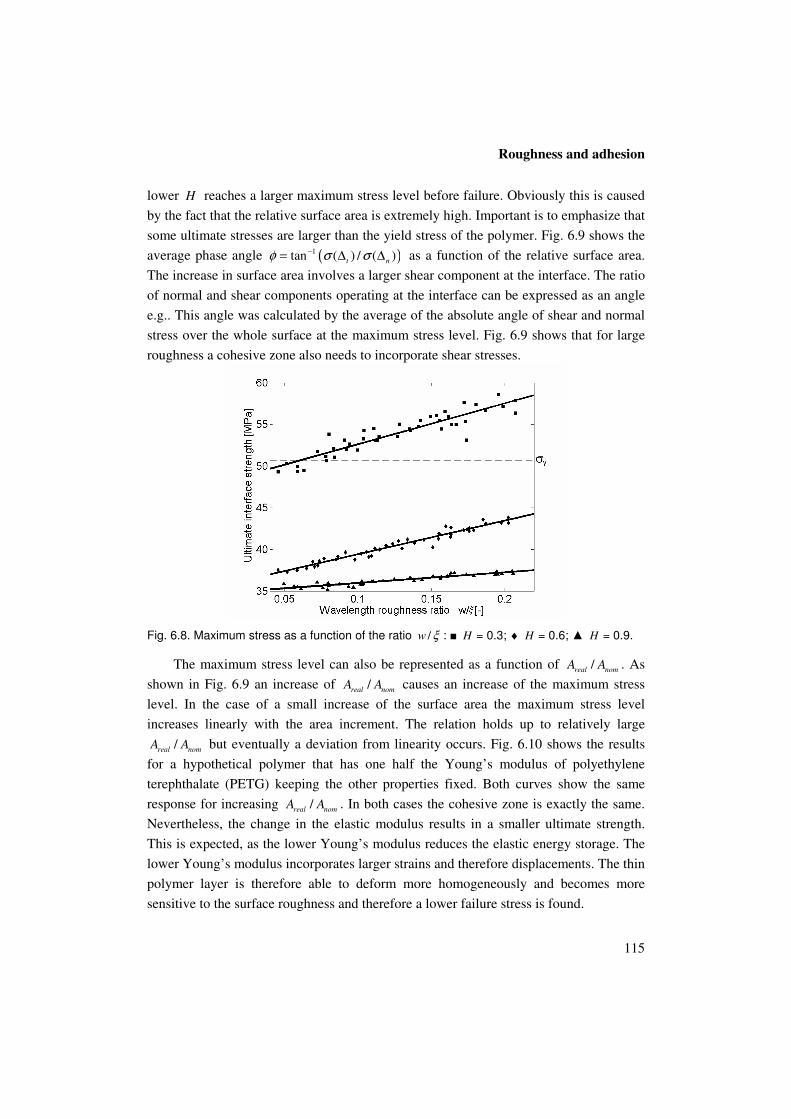
lower H reaches a larger maximum stress level before failure. Obviously this is caused
by the fact that the relative surface area is extremely high. Important is to emphasize that
some ultimate stresses are larger than the yield stress of the polymer. Fig. 6.9 shows the
average phase angle ( )1tan ( ) / ( )t n
φ σ σ−= ∆ ∆ as a function of the relative surface area.
The increase in surface area involves a larger shear component at the interface. The ratio
of normal and shear components operating at the interface can be expressed as an angle
e.g.. This angle was calculated by the average of the absolute angle of shear and normal
stress over the whole surface at the maximum stress level. Fig. 6.9 shows that for large
roughness a cohesive zone also needs to incorporate shear stresses.
Fig. 6.8. Maximum stress as a function of the ratio /w ξ : ■ H = 0.3; ♦ H = 0.6; ▲ H = 0.9.
The maximum stress level can also be represented as a function of /real nom
A A . As
shown in Fig. 6.9 an increase of /real nom
A A causes an increase of the maximum stress
level. In the case of a small increase of the surface area the maximum stress level
increases linearly with the area increment. The relation holds up to relatively large
/real nom
A A but eventually a deviation from linearity occurs. Fig. 6.10 shows the results
for a hypothetical polymer that has one half the Young’s modulus of polyethylene
terephthalate (PETG) keeping the other properties fixed. Both curves show the same
response for increasing /real nom
A A . In both cases the cohesive zone is exactly the same.
Nevertheless, the change in the elastic modulus results in a smaller ultimate strength.
This is expected, as the lower Young’s modulus reduces the elastic energy storage. The
lower Young’s modulus incorporates larger strains and therefore displacements. The thin
polymer layer is therefore able to deform more homogeneously and becomes more
sensitive to the surface roughness and therefore a lower failure stress is found.
Chapter 6
116
6.3.5 Discussion and conclusion
A self-affine roughness model is employed which can generate randomly rough surfaces
in a reproducible manner. The model proves to be a worthwhile extension to existing
theoretical approaches [17]. Fig. 6.8 and Fig. 6.10 show that thin polymer interlayers can
be stronger than the yield stress of the bulk. In both figures the data points are not at a
straight line. In Fig. 6.10, a large maximum stress distribution for rougher surfaces can
be seen. The statistical nature of self-affine surfaces causes that most of the numerical
experiments are not on the trend line. For the hypothetical polymer with half the
Young’s modulus of PETG this distribution is even larger. This is mainly caused by the
lower elastic modulus that incorporates larger deformations with even less energy
storage. This makes the interface more critical to failure. In that case local surface
characteristics start to play an important role by generating voids. These local effects
influence the maximum stress level to a large extent.
For larger Hurst exponents the surface area increase is small. In that case /real nom
A A
and maximum stress appear to have a linear relationship. When the surface becomes
rougher, the average angle between the tensile direction and the surface becomes so high
that shear starts to play an important role (see Fig. 6.9). Fig. 6.6 illustrates the impact on
the stresses. A pure mode II crack shows the highest peak, consequently it will show a
much larger stress than of a mode I crack. This together with an increase of /real nom
A A
will help to increase the ultimate interface stress. On the other hand, locally voids will
appear which decrease the ultimate interface strength. As a consequence, the linear
Fig. 6.9. Average angle between shear and
normal stress: ■ H = 0.3; ♦ H = 0.6; ▲
H = 0.9.
Fig. 6.10. The ultimate interface strength as
a function of /real nom
A A for PETG (filled
symbols) and the hypothetical polymer (open
symbols): ■ H = 0.3; ♦ H = 0.6; ▲ H = 0.9.
Roughness and adhesion
117
relationship does not hold for small Hurst exponents or very small lateral correlation
lengths.
The impact of small interface effects is responsible for the larger deviations of the
maximum stress. These local effects amplify for polymers with lower Young’s moduli
strengthened by the reduced elastic energy storage.
6.4 Adhesion along metal-polymer interfaces during plastic deformation
In the manufacturing process severe plastic deformation is used to obtain the final
shapes of the end products. A drawback of plastic deformation is the intrinsic
roughening of the surface of the metal caused by plasticity. This section concentrates on
the implications of the roughening process for the mechanical properties of the
combined metal-polymer system. Clearly the subject is closely related to that of a large
number of papers discussing the impact of roughness on the work of adhesion W, e.g
[2,3,4,7,18,19,20]. However, our work detailed in [9] sets itself apart from earlier
research because it emphasizes on: First, the evolution of roughness of the metal as a
mechanical loading mechanism of a metal-polymer interface; second, the coupling
between the metal substrate and the polymer coating using a stress-separation law; and
third, the polymer behavior including yielding, softening and hardening. In the following
these points are briefly discussed in the framework of the current understanding.
The topics addressed here are the work of adhesion W between such a self-affine
roughening metal-polymer system, the dependence of W on the parameters w, H and ξ,
and the evolution of W as a function of uniaxial strain ε.
Fig. 6.11 illustrates the problem under consideration, and introduces a number of
relevant quantities. It shows a metal and polymer in contact across an interface at zero
Fig. 6.11. Schematic representation of some model parameters at two stages in the deformation process ( ε = 0 and ε > 0).
Chapter 6
118
strain, and also at a higher strain value. During straining the area of contact increases,
the average stress in the polymer increases, and roughness develops at the interface,
which is accompanied by stress concentrations. These stress concentrations may lead to
local delamination. Also, note the appearance of shear bands in the polymer, caused by
the intrinsic softening that characterizes the post-yield deformation behavior of typical
glassy polymers. The impact of all of these phenomena on the work of adhesion W is the
subject of this section.
For a metal (m) and a polymer (p) coming into contact across an area A0 the work of
adhesion W per unit area is defined as:
0 2m p mp
W G γ γ γ= = + − , (6.8)
where γm and γp represent the surface tension and γpm the interface energy. During
uniaxial deformation at a strain ε the nominal (projected) contact area nom
A is given by:
0( ) (1 )nom
A Aε ε= + . (6.9)
Due to roughening of the metal surface the real contact area real
A at a strain ε is larger
than Anom(ε) and is given by
( ) ( )real
A dA rε = ∫�
, (6.10)
where the integral is taken over all positions r�
on the nominal surface.
The work of adhesion ( )W ε at a strain ε can be approximated by:
( ) ( )( ) ( ) ( )
( ) ( )( ) ( )
h
E E E
nom nom nom
G r dA rU U UW G
A A A
εε ε εε ε
ε ε
+= − = −
∫� �
, (6.11)
where ( )G ε represents all surface and interface terms and ( )E
U ε is the elastic energy
stored in the bulk of the materials. The elastic energy is split in two terms:
First, ( )E
Uε ε represents the average energy stored in a deformed block of material
in case the surface does not roughen and may be approximated by
2
1
2
( )( )
E nom
pol
U dAE
ε σ εε = , (6.12)
where d is the layer thickness, pol
E is the Young’s modulus of the polymer. Due to the
substantial difference of the elastic moduli the metal can be regarded as a rigid solid and
is omitted from the energy balance.
Second, ( )h
EU ε represents the elastic energy contribution of the roughening
interface. The term ( ) ( ) ( ) /nom
G G r dA r Aε = ∫� �
takes into account the two competing
effects of roughening on the interface energy, on the one hand an increase in real contact
Roughness and adhesion
119
area, and on the other hand local delamination caused by the stresses acting on the
interface.
So far, the interface was described in terms of energies only. In reality stresses are
transferred across the interface until delamination occurs, see Fig. 6.11. The interface
can be described in terms of a stress-separation law (e.g ( )σ ∆ with ∆ the displacement
at the interface. Traction and shear stresses, i.e. n
σ , and tτ respectively, and resulting
displacements ( ),n t
∆ ∆ may have components normal and tangential to the interface.
The work of adhesion W enters in a natural way as
0
0
. /ij j
W G n dr dA dsσ σ∞
= = = ⋅∫ ∫ ∫� �
. (6.13)
0G again contains all surface and interface terms. One can now also define
0
0
( )G G dsσ∆
∆ = − ⋅∫ . (6.14)
In a physical sense ( )G ∆ represents the remaining work needed to separate two surfaces
in the presence of a pre-applied stress. In the case of a roughening surface as considered
here, the stresses at a certain position stem from the height differences, e.g. areas of the
interface between two roughness peaks experience a local opening stress.
The separate contributions of interface and bulk to the work of adhesion and their
dependence on the strain are a key issue. In the following our numerical approach is
described that takes into account all the aforementioned features.
6.4.1 Model description
The numerical model describes the interface between steel and PETG and it will take
into account the following three aspects: Polymer deformation; roughening of the metal
surface; interaction between metal and polymer across the surface. The representation of
the PETG layer is a finite element model built from quadrilaterals representing a size of
1x1 µm2 [14,15]. The initial length of the system is 2049 µm and the initial thickness h
of the PETG film is 60 µm unless mentioned otherwise. In the calculations the ‘metal’
substrate is taken to be rigid. This is a reasonable approximation, since the elastic
modulus of steel is typical of the order of 100 GPa and therefore the thin polymer
coating is expected to have little effect on its roughening behavior.
6.4.2 Polymer constitutive behavior
The constitutive behavior used for the polymer is described in [15] and the response and
values of the parameters are given in the caption of Fig. 6.12. Here the curve is plotted
Chapter 6
120
as a function of the true strain εtrue , which is defined as ( )ln 1true
ε ε= + . The regime of
the polymer is purely elastic and after yielding the polymer starts to soften. In this
regime shear bands occur as a result of localization. Eventually, the hardening phase will
stop the localization.
6.4.3 Roughening of the metal surface
One of the simplifications in the approach proposed here is to parameterize the
roughness evolution of a metal surface as a function of strain, and to assume that the
roughness evolution at a polymer-metal interface is essentially identical to this because
of the large difference in elastic moduli of typical metals (~100s of GPa) and glassy
polymers (~ 1GPa).
The surface morphology for as received rolled stainless steel (with an averaged
grain size equal to 11.7 µm and a plate thickness of 500 µm) was determined
experimentally with confocal microscopy [11] during uniaxial tensile experiments and
characterized by the following empirical relationships as a function of strain ε:
( ) 1
0
(1 )
( ) (1 ),
C
satw w e
εε
ξ ε ξ ε
−= −
= + (6.15)
with sat
w = 1.1 µm, C1 = 6.1 and ξ0 = 35 µm. The Hurst exponent H was found to be
insensitive to strain and is taken to be constant H(ε) = H0 = 0.6. The correlation length ξ
increases with the strain in the tensile direction. A qualitatively similar behavior was
0.0 0.1 0.2 0.3 0.40
10
20
30
40
50
σxx [M
Pa
]
εtrue
[-]
Fig. 6.12. Stress-strain relationship for PET, using the following values as defined in [15]:
0/E s = 7.76;
0/
sss s = 0.774;
0/As T = 91.99;
0/h s = 3.90; α = 0.25; N = 12.602;
0/
RC s =
0.132.
Roughness and adhesion
121
also found for other materials (Fe, Al, [12]). From experimental results least square fits
to eq. (6.15) were performed [11]. A recursive refinement algorithm (see chapter 2) was
used to simulate surfaces with the characteristics described by eq. (6.15). A detailed
example of the roughness evolution in the numerical model is displayed in chapter 2, a
few stages of which are apparent from Fig. 6.13.
6.4.4 Interaction between metal and polymer
In finite element models, stress-separation laws are commonly known as “cohesive
zones” and different kinds have been discussed in literature. In the numerical
calculations presented here the interface was implemented as a rate-independent mixed-
mode cohesive zone of the type described in [13]. This type defines coupled stress
separation laws ( , )n n t
σ ∆ ∆ (tractions) and ( , )t n t
τ ∆ ∆ (shear stresses) at the interface,
with n
∆ and t
∆ coordinates normal and parallel to the interface, respectively. The
distance ∆0 is defined as the point at which the opening stress n
σ attains its maximum
value max
nσ . Unless stated otherwise, the parameters used for the cohesive zone in this
section are: normal-to-shear stress ratio max max/n t
σ τ = 0.75, interface energy 0
CZG = 30
J/m2, working distance ∆0 = 300 nm and max
nσ = 36.8 MPa. To illustrate the key features
of the cohesive zone ( ,0)n n
σ ∆ is shown in Fig. 6.14.
For each interface element the surface area and stress state are calculated. The
interface energy can be calculated analogously to eq. (6.14) as:
Fig. 6.13. Typical results of stress fields in the PETG caused by strain induced roughening of
the substrate, showing xx
σ in the PET. Three cases are shown for true
ε in the elastic (top),
softening (middle) and hardening (bottom) region of the polymer stress-strain curve.
Chapter 6
122
0 , ,
0 0
( ) ( ) ( )n t
CZ CZ CZ CZ
i i n i tG G dn dtε σ ε τ ε
∆ ∆
= − −∫ ∫ , (6.16)
where 0
CZG refers to 0G of the cohesive zone (see eq. (6.13)), ,
CZ
i nσ is the stress normal
and ,
CZ
i tτ the stress parallel to the interface element i. In this work we are interested in
( )W ε and therefore in ( )G ε and ( )U ε . In the context of the numerical model we
define ( )G ε as follows:
1
( ) ( )
( )
N
CZ
i i
CZ i
nom
G A
GA
ε ε
ε ==∑
, (6.17)
with i running over the discrete elements in the model, ( )i
A ε and ( )CZ
iG ε are the
surface area and the interface energy of the i -th element, respectively.
Since all energies in the following are derived from the numerical model the
superscript CZ will be dropped.
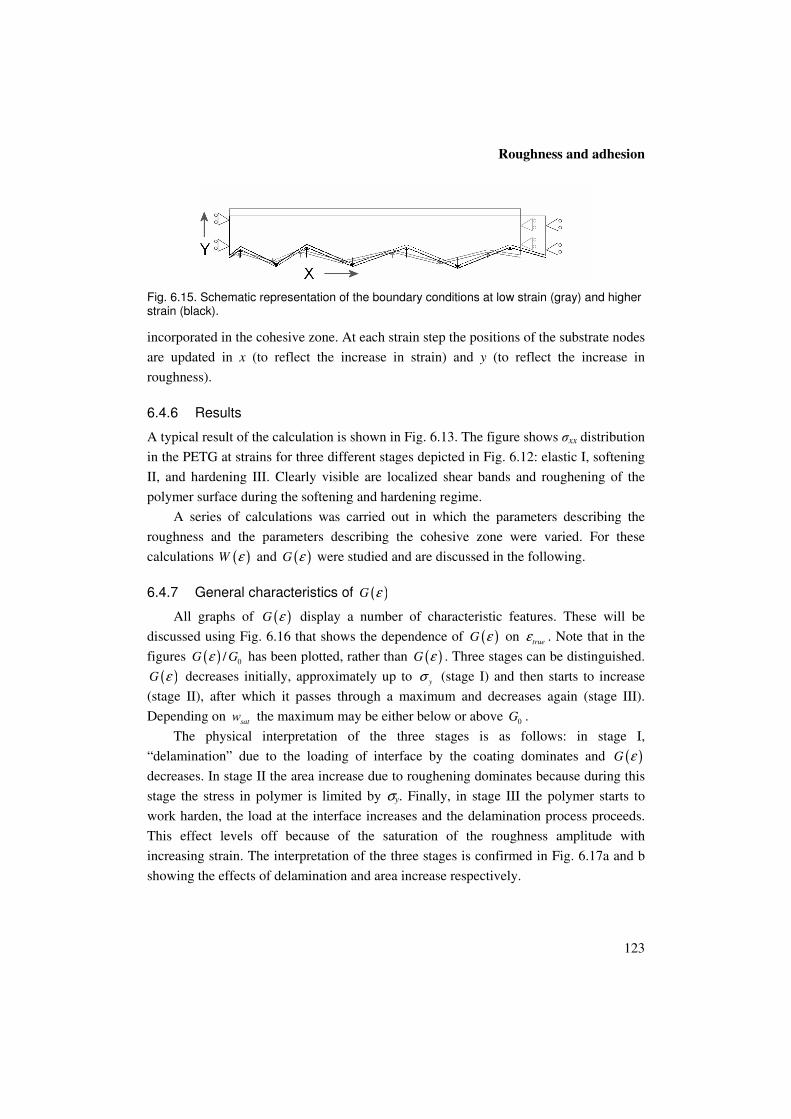
6.4.5 Simulation of deformation
In the calculations the composite is loaded in uniaxial plane strain up to strains of 50%
(in steps of 0.1%). At each step the following boundary conditions (see Fig. 6.15) are
imposed on the PETG and the cohesive zone. At the side of the PETG at x = 0
displacements along x are imposed while displacements along y are free. Similar
boundary conditions are applied at x = L(ε). Along the interface displacements in the
substrate are constrained in all directions. Displacements in the polymer are not
restricted and they are coupled to those in the substrate by the stress-separation laws
0 2 4 6 8 100
10
20
30
40
G(∆)
σn [
MP
a]
∆n/∆
0 [-]
0 2 4 6 8 100
10
20
30
G [J/m
2]
∆n/∆
0 [-]
G(∆)
Fig. 6.14. Characteristics of the cohesive zone (a) ( , 0)n n
σ ∆ plotted as function of 0
/n
∆ ∆ (b)
( ) ( , 0)n
n nG n dnσ
∞
∆∆ = ∫ plotted as function of
0/
n∆ ∆ .
Roughness and adhesion
123
incorporated in the cohesive zone. At each strain step the positions of the substrate nodes
are updated in x (to reflect the increase in strain) and y (to reflect the increase in
roughness).
6.4.6 Results
A typical result of the calculation is shown in Fig. 6.13. The figure shows σxx distribution
in the PETG at strains for three different stages depicted in Fig. 6.12: elastic I, softening
II, and hardening III. Clearly visible are localized shear bands and roughening of the
polymer surface during the softening and hardening regime.
A series of calculations was carried out in which the parameters describing the
roughness and the parameters describing the cohesive zone were varied. For these
calculations ( )W ε and ( )G ε were studied and are discussed in the following.
6.4.7 General characteristics of ( )G ε
All graphs of ( )G ε display a number of characteristic features. These will be
discussed using Fig. 6.16 that shows the dependence of ( )G ε on true
ε . Note that in the
figures ( ) 0/G Gε has been plotted, rather than ( )G ε . Three stages can be distinguished.
( )G ε decreases initially, approximately up to y
σ (stage I) and then starts to increase
(stage II), after which it passes through a maximum and decreases again (stage III).
Depending on sat
w the maximum may be either below or above 0G .
The physical interpretation of the three stages is as follows: in stage I,
“delamination” due to the loading of interface by the coating dominates and ( )G ε
decreases. In stage II the area increase due to roughening dominates because during this
stage the stress in polymer is limited by σy. Finally, in stage III the polymer starts to
work harden, the load at the interface increases and the delamination process proceeds.
This effect levels off because of the saturation of the roughness amplitude with
increasing strain. The interpretation of the three stages is confirmed in Fig. 6.17a and b
showing the effects of delamination and area increase respectively.
Fig. 6.15. Schematic representation of the boundary conditions at low strain (gray) and higher strain (black).
Chapter 6
124
0.0 0.1 0.2 0.3 0.4
0.85
0.90
0.95
1.00
1.05
IIIII
G(ε
)/G
0 [-]
εtrue
[-]
I
Fig. 6.16. Normalized interface energy 0
( ) /G Gε as a function of ε for different values of sat
w
: � sat
w = 1.1 µm; � sat
w = 2.2 µm; � sat
w = 3.3 µm; � sat
w = 4.4 µm and � sat
w = 5.5 µm.
Here it is useful to split the effect of the roughness and the increase in surface area
(as shown in Fig. 6.17a and b):
0
( )( ) ( )
( )
real
nom
AG G G
A
εε ε
ε= + ∆ , (6.18)
where the effect of the roughness on the interface energy is
1
1
( ) ( )
( )
( )
N
i i
i
N
i
i
G A
G
A
ε ε
ε
ε
=
=
∆ = −∑
∑ (6.19)
and the surface area increase effect is
1
( )( )
( ) ( )
N
i
real i
nom nom
AA
A A
εε
ε ε==∑
. (6.20)
Fig. 6.17a shows the reduction in interface energy as indicated in eq. (6.19). This
effectively removes the effect of increasing area and gives an indication of the decrease
in ( )G ε caused by the loading of the interface. At the onset ( )G ε∆ decreases rapidly,
i.e. approximately linearly with w2. At the yield point of the polymer the rate of decrease
of ( )G ε∆ reduces considerably, and in fact for low sat
w the interface partly recovers due
to the softening of the polymer layer.
Roughness and adhesion
125
0.0 0.1 0.2 0.3 0.4-0.25
-0.20
-0.15
-0.10
-0.05
0.00
∆G
(ε)/
G0 [-]
εtrue
[-]
0,0 0,1 0,2 0,3 0,4
1,00
1,05
1,10
1,15
1,20
Are
al(ε
)/A
nom(ε
) [-
]
εtrue
[-]
Fig. 6.17. Normalized interface energy 0
( ) /G Gε (same data as in Fig. 6.16) separated into the
contribution (a) 0
( ) /G Gε∆ and (b) ( ) / ( )real nom
A Aε ε .
Fig. 6.17b shows ( ) /real nom
A Aε which exhibits a monotonous increase due to
roughening up to a maximum where the increase in nominal area starts dominating the
effects of the increase of w(ε).
6.4.8 ( )G ε as a function of w, H and ξ
In the previous section the general behavior of ( )G ε was illustrated, and curves at
different sat
w were presented. The situation remains about the same if we change other
parameters describing the self-affinity, the correlation length ξ and the Hurst exponent
H. A low value of H results in a rapid fluctuation on a shorter length scale, and this leads
to a larger decrease in ( )G ε at lower strains (Fig. 6.18a) and to a continuing
delamination above the yield point. However, the overall effect is still compensated by
the faster increase in surface area (Fig. 6.18b).
0.0 0.1 0.2 0.3 0.4-0.20
-0.15
-0.10
-0.05
0.00
∆G
(ε)/
G0 [
-]
εtrue
[-]
0 2 4 6 8 100,94
0,96
0,98
1,00
1,02
1,04
1,06
G(ε
)/G
0 [-]
w2[µm
2]
Fig. 6.18. (a) 0
( ) /G Gε∆ as a function of ε , and (b) 0
( ) /G Gε as a function of 2
w . For all
curves sat
w = 3.3 µm. Hurst exponents H: � H = 0.4; � H = 0.6; � H = 0.8 and � H = 1.0.
Chapter 6
126
6.4.9 ( )W ε as a function of layer thickness
We note that the effects shown in the previous section do not take into account the
elastic energy stored in the layer. Fig. 6.19 shows ( )G ε , similar to Fig. 6.16 and Fig.
6.17b for layers of different thickness. For each thickness ( )G ε remained more or less
constant. Fig. 6.20 shows ( )W ε up to the strain at yielding. ( )W ε equal to zero
indicates that the interface becomes metastable to fracture. Clearly, ( ) / ( )E nom
U Aε ε
dominates ( )W ε . For the 10 µm coating ( )W ε decreases to a value of about 0.6 at the
yield strain, indicating that this coating is stable against delamination. ( ) / ( )E nom
U Aε ε
increases linearly with d, and for the coatings of 30µm and of 60µm the energy ( )W ε
turns out to be smaller than zero and therefore these situations are metastable.
0 2 4 6 8 100,94
0,96
0,98
1,00
1,02
1,04
1,06
G(ε
)/G
0 [-]
w2 [µm
2]
0.00 0.01 0.02 0.03 0.04 0.05 0.060.0
0.2
0.4
0.6
0.8
1.0
1.2
W(ε
)/G
0 [-]
εtrue
[-]
Fig. 6.19. 0
( ) /G Gε as a function of 2
w . For
all curves sat
w = 3.3 µm. Thickness h : � h =
10 µm; � h = 30 µm and � h = 60 µm.
Fig. 6.20. Work of adhesion ( )W ε of the
system for different coating thickness h : � h
= 10 µm; � h = 30 µm and � h = 60 µm (same dataset as Fig. 6.19).
6.4.10 Discussion
A relevant point of discussion is the influence of the cohesive zone. In Fig. 6.21 the
results for three different parameter sets describing the cohesive zone (in the inset) are
shown. Regardless of the parameter values of the cohesive zone the same qualitative
behavior of the ( )W ε is found, i.e. weakening, recovery and renewed weakening.
Another interesting aspect is the relation to analytical results relating ( )G ε to the
roughness of interfaces. In literature analytical studies have been reported for situations
[6,7] in which a flat elastic body is brought into perfect contact with a rigid rough body.
The physical picture emerging from these analytical results is the following: roughness
increases the real contact area at the interface and this effect contributes to an increase
of the interface energy. On the other hand for complete contact to occur, elastic energy is
stored in the material and this contributes to a decrease in interface energy. Depending
on the properties of interface, substrate and polymer (geometric as well as elastic) one of
Roughness and adhesion
127
these two effects dominates and in fact a critical modulus c
E can be defined for the
polymer layer that separates these two regimes [6]. For c
E it is found that
2
0 0 0
4(1 ) ( ) / ( )
( )c
E G g H f Hπ
νξ ε
= − , (6.21)
with
01 2
0 0
0
0 min
( ) 11 2
H
Hf H
H r
ξ−
= − −
and
02(1 )
0 0
0
0 min
( ) 12(1 )
H
Hg H
H r
ξ−
= − −
. (6.22)
Here rmin represents the smallest length scale in the system (in our case 1 µm). In the
case of PETG and steel and for a substrate geometry typical for the ones discussed here
we find c
E ~ 70 MPa which means that PET
E >>c
E . Therefore, based on the analytical
approach the interfaces are expected to show a decrease in interface energy for
increasing roughness. An expression for 0( ) /G Gε is given in [6].
In literature analytical studies have been reported for situations [6,7] in which a flat
elastic body is brought into perfect contact with a rigid rough body. Using the definitions
in Eqs. (6.8)-(6.12) and accounting for the self-affine character of the surface it can be
shown that the results in [6,7] are equivalent to:
0
( ) ( ) ( ) ( )h
E real nomU G A G Aε ε ε ε− = − . (6.23)
0 1 2 3 40.85
0.90
0.95
1.00
1.05
0 500 1000 15000
10
20
30
40
σn
[M
Pa
]
∆n [nm]
G(ε
)/G
0[-
]
w2[µm
2]
Fig. 6.21. Normalized effective interface energy 0
( ) /G Gε as a function of the squared rms
roughness (sat
w = 2.2) for different 0
G and working distance 0
∆ : � z0 = 150 nm, max
nσ = 18.4
MPa and 0
G =7.5 J/m2; � z0 = 300 nm,
max
nσ = 18.4 MPa and 0
G =15 J/m2; � z0 = 300 nm,
max
nσ = 36.8 MPa and 0
G =30 J/m2.
Chapter 6
128
For ( )h
EU ε , the elastic energy in the polymer due to the surface roughness only, it is
found that [6,7]:
2
2( ) ( ) ( , )
4(1 )
h
E nom
EU A qC q d qε ε ε
ν=
− ∫ , (6.24)
where q is defined as 2 / rπ and ( ),C q ε is the Fourier transform of the substrate height-
height correlation function ( ),C r ε defined in eq. (6.2)[21]. For the term 0 ( )real
G A ε it is
found that
2 2
0 0
1( ) ( ) 1 ( , )
2real nom
G A G A q C q d qε ε ε
= +
∫ . (6.25)
For ( ),C r ε with scaling properties given by eq.(6.2), ( , )C q ε scales as -2-2H( , ) qC q ε ∝ if
q >>1ξ , and as 2( , ) wC q ε ∝ if q <<1ξ . Using the latter relationship together with Eqs.
(6.23), (6.24) and (6.25) results in eq. (6.26). These results hold when a number of
criteria are met, most importantly | | 1h∇ � and the surfaces should stay in complete
contact.
12 2
2 220 02 2
0 0
( ) 8 4(1 ( ) ( ) ) ( ) ( )
( ) ( )
x
c
G Ew g H x e dx w g H
G E
ε π πε ε
ξ ε ξ ε
∞−= + −∫ . (6.26)
In Fig. 6.22 a comparison is made between this analytical solution and a number of
results from the numerical simulations (Fig. 6.16). To compare both cases it is necessary
to introduce an effective modulus E that reflects the elastic properties of both the
cohesive zone and the polymer coating. The best agreement of the slope was found with
value of 118 MPa is used.
0.0 0.5 1.0 1.5 2.0 2.5
0.85
0.90
0.95
1.00
G(ε
)/G
0[-
]
w2[µm
2]
Fig. 6.22. Comparison of the results of eq. (6.26) (with E = 118 MPa) indicated with the drawn
line and numerical results � sat
w = 1.1 µm; � sat
w = 2.2 µm; � sat
w = 3.3 µm; � sat
w = 4.4
µm and � sat
w = 5.5 µm. An enveloping curve (dash-dot ) accentuate the response of the
numerical model in case the PETG behaves elastically.
Roughness and adhesion
129
The figure shows that the analytic result (indicated by a drawn line) predicts a
monotonously linear decrease of 0( ) /G Gε as a function of 2( )w ε . We note that the
existence of an enveloping curve (indicated by a dash-dot line in the figure) may be
inferred from the numerical simulations (also shown in Fig. 6.21). This indicates that as
long as the PETG is in the elastic regime the interface energy depends only on 2( )w ε which is in qualitative accordance with the analytical results. A difference in this
respect is the occurrence of a non-linear regime at low strains for the numerical solutions
which is due to the description of the interface with a stress-separation law with a certain
working distance. Decreasing the interaction distance for the cohesive zone will lead to a
closer correspondence with the analytical result.
Deviation from the enveloping curve occurs for all numerical calculations as soon
as the average strain in the PETG reaches the yield strain. The value of 2( )w ε at which
this occurs depends on sat
w . It can be seen that for small sat
w the deviations from the
envelope curve occur for very low 2( )w ε . The softening that occurs in the PETG above
the yield strain leads to an increase or partial recovery of 0( ) /G Gε , a behavior that
differs drastically from what is expected from the analytical result.
6.4.11 Conclusion
The following generic picture emerges that describes the energetics of a strained ductile
glassy polymer layer with a roughening interface:
At the interface local delamination leading to a decrease in adhered area competes
with roughening that leads to an increase in adhered area.
A decrease of the interface energy occurs in the regime where the polymer deforms
elastically, a (partial) recovery occurs during the softening phase of the polymer
followed by a renewed decrease during the hardening phase of the polymer coating.
For layers of practical thickness the elastic energy stored in the polymer coating by
straining at the yield stress dominates the work of adhesion and the stability of the
interface against delamination.
6.5 Conclusion
In the adherence of a polymer/metal system the polymer showed to be the limiting factor
for rough surfaces. The metal surface introduces both plastic and elastic deformation in
the coating. In some cases the surface roughness creates enough extra surface leading to
a better adhesion. The elastic storage is the competing energy, which is able to destroy
the adhesion. In particular partial contact occurred during deformation of polymer-metal
laminates. It is concluded that a precise knowledge of both the metal and the polymer
deformation process is the essential key to a successful forming process.
Chapter 6
130
6.6 References
1. H. Hertz, Ueber die Beruehrung fester elastischer Koerper, J. Reine Agnew.
Math. 92, 156 (1882).
2. J.F. Archard, Elastic deformation and the laws of friction, Proceedings of the
Royal Society of London A 243, 190 (1957).
3. A.W. Bush, R.D. Gibson and T.R. Tomas, The Elastic Contact of a Rough
Surface, Wear 35, 87 (1975).
4. B.N.J. Persson, F. Bucher and B. Chiaia, Elastic contact between randomly
rough surfaces: Comparison of theory with numerical results, Physical
Review B 65, 182106 (2002).
5. B. Mandelbrot, The fractal geometry of nature, Freeman, New York (1977).
6. B. N. J. Persson and E. Tosatti, The effect of surface roughness on the
adhesion of elastic solids, Journal of Chemical Physics 115, 3840 (2001).
7. G. Palasantzas, J. Th. M. De Hosson, Influence of surface roughness on the
adhesion of elastic films, Physical Review E 67, 021604/1-6 (2003).
8. R. van Tijum and J.Th.M. De Hosson, Effects of self-affine surface roughness
on the adhesion of metal-polymer interfaces, Journal of Materials Science 40,
3503-3508 (2005).
9. R. van Tijum, W.P. Vellinga and J.Th.M. De Hosson, Adhesion along metal-
polymer interfaces during plastic deformation, Journal of Materials Research,
accepted (2006).
10. Y. Zhao, G.-C. Wang, and T.-M. Lu, Characterization of amorphous and
crystalline rough surface, Principles and applications, Academic Press,
(2001).
11. R. van Tijum, W.P. Vellinga and J.Th.M. De Hosson, in: Linking Length
Scales in the Mechanical Behavior of Materials, Editors: R.E. Rudd, T.J.
Balk, W. Windl, N. Bernstein, MRS Proceedings Volume 882E , EE3.2,
(2005).
12. O. Wouters, W.P. Vellinga, R. van Tijum and J.Th.M. De Hosson, On the
evolution of surface roughness during deformation of polycrystalline