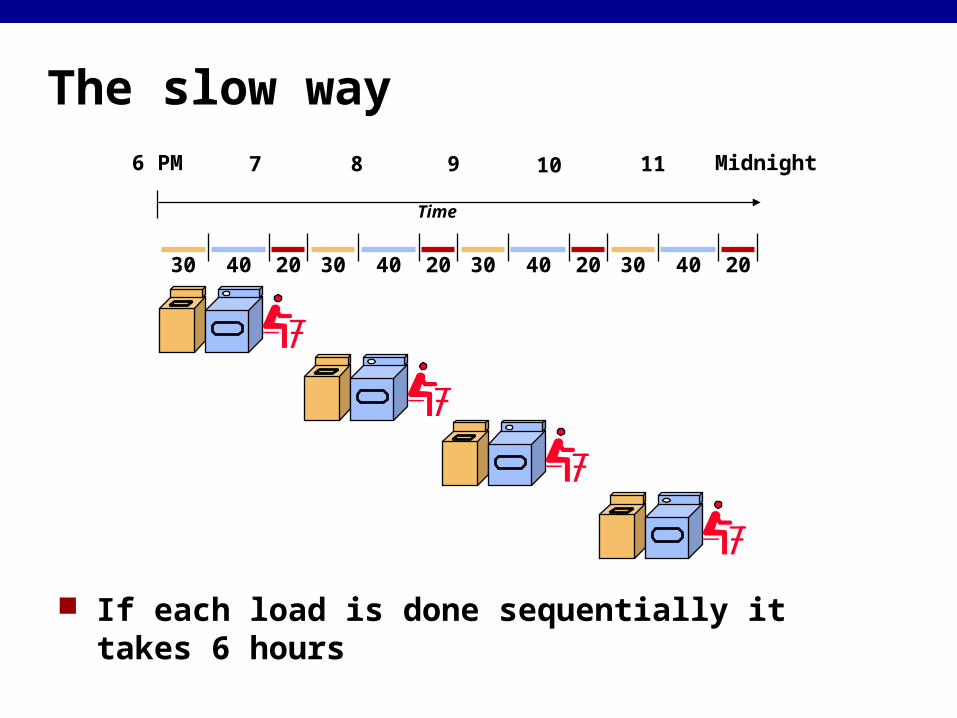
Real-World Pipelines: Car Washes Idea Divide process into independent stages Move objects through stages in sequence At any instant, multiple objects being processed Sequential Parallel Pipelined
Transcript
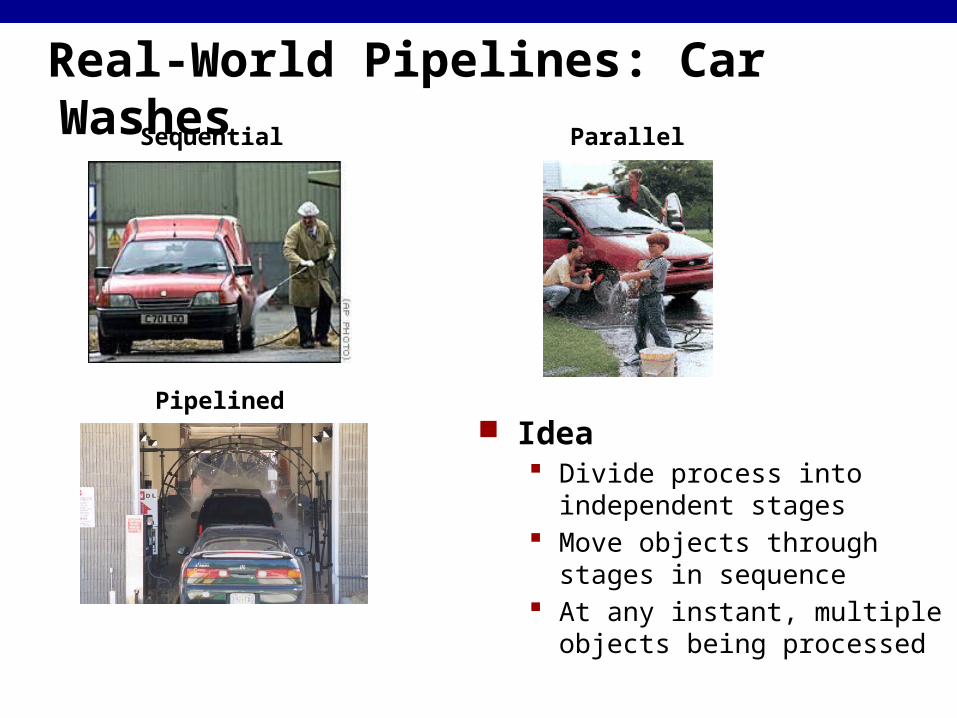
Real-World Pipelines: Car Washes
Idea Divide process into independent
stages Move objects through stages in
sequence At any instant, multiple objects
being processed
Sequential Parallel
Pipelined
Computational Example
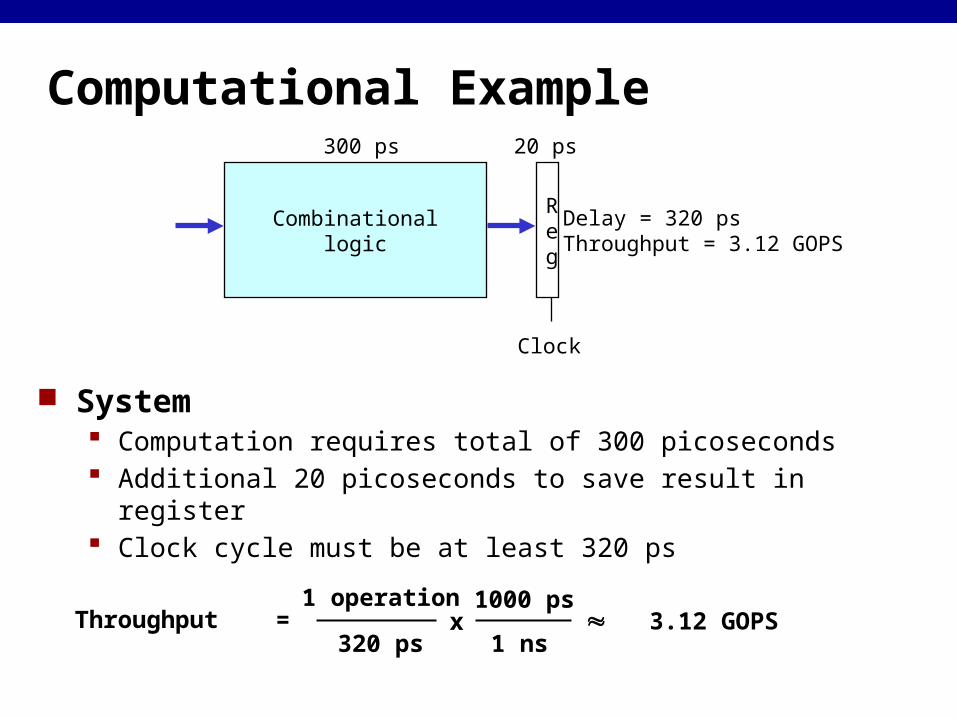
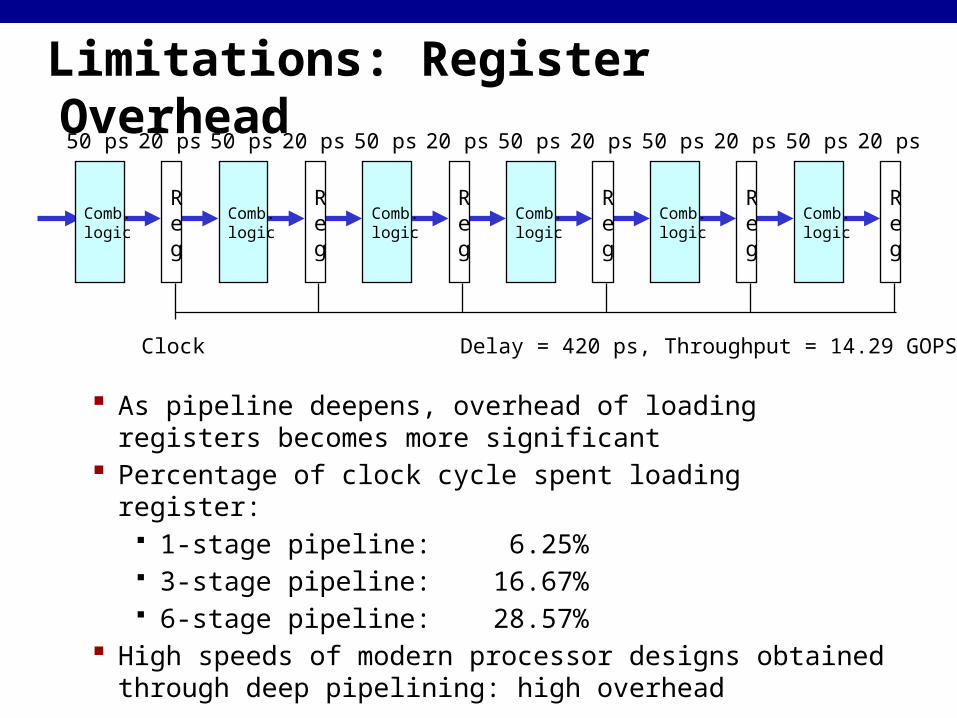
System Computation requires total of 300 picoseconds Additional 20 picoseconds to save result in register Clock cycle must be at least 320 ps
Combinationallogic
Reg
300 ps 20 ps
Clock
Delay = 320 psThroughput = 3.12 GOPS
Throughput = 1 operation
320 ps 1 ns
1000 ps 3.12 GOPSx
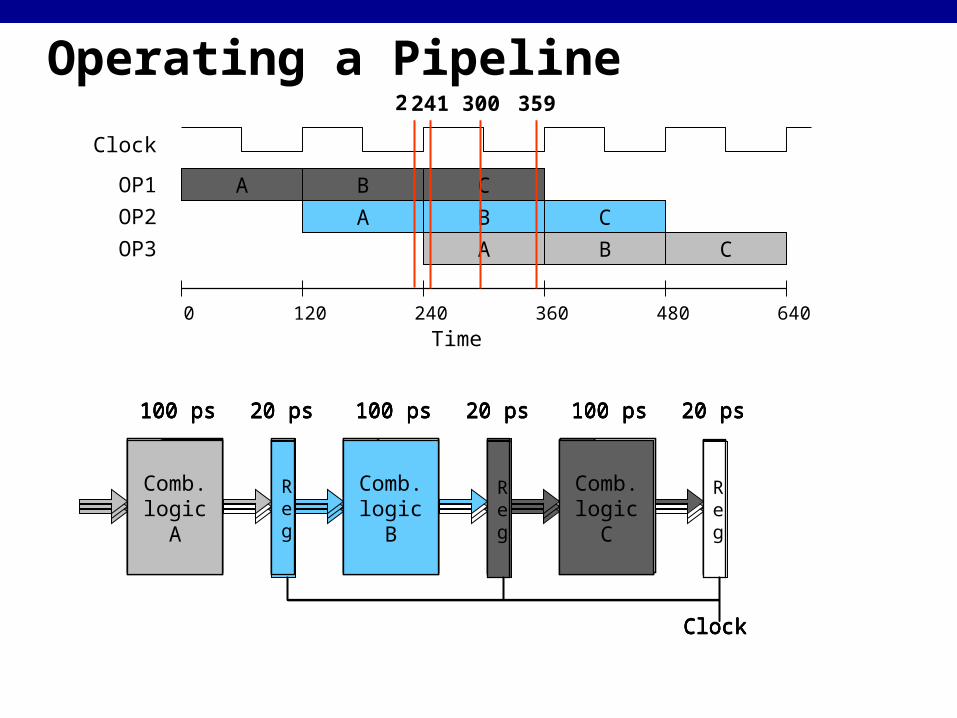
3-Stage Pipelined Version
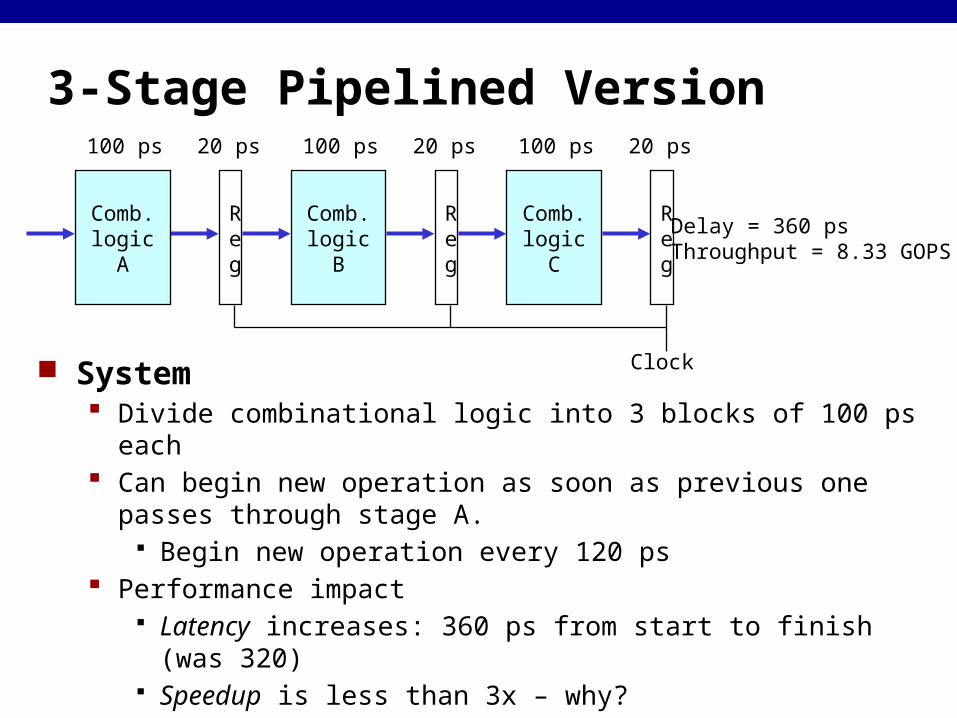
System Divide combinational logic into 3 blocks of 100 ps each Can begin new operation as soon as previous one passes through stage A.
Begin new operation every 120 ps Performance impact
Latency increases: 360 ps from start to finish (was 320) Speedup is less than 3x – why?
Reg
Clock
Comb.logic
A
Reg
Comb.logic
B
Reg
Comb.logic
C
100 ps 20 ps 100 ps 20 ps 100 ps 20 ps
Delay = 360 psThroughput = 8.33 GOPS
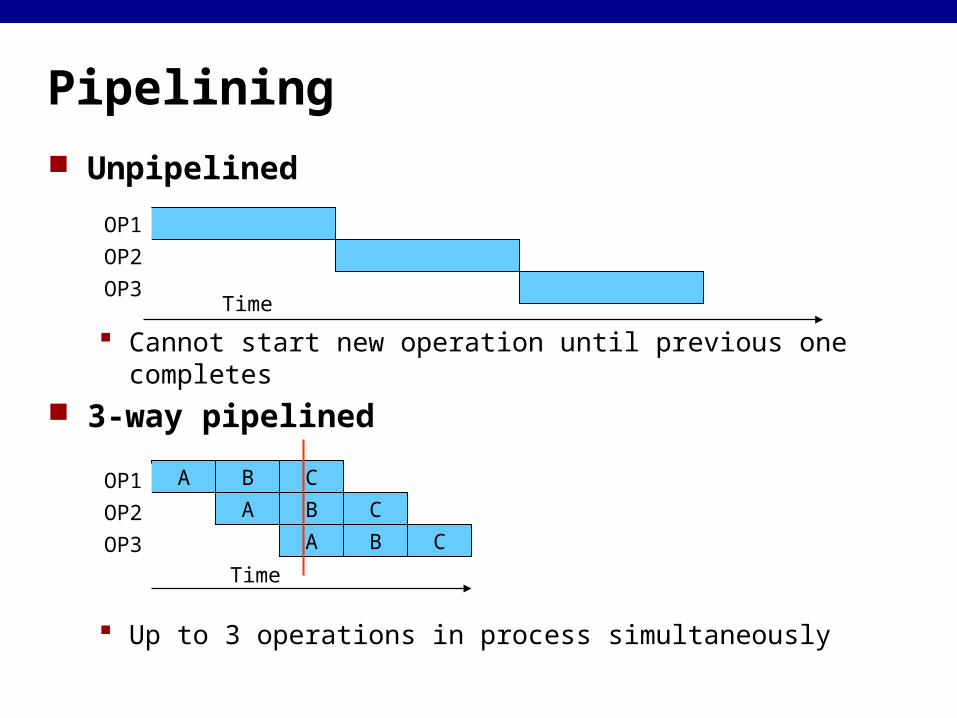
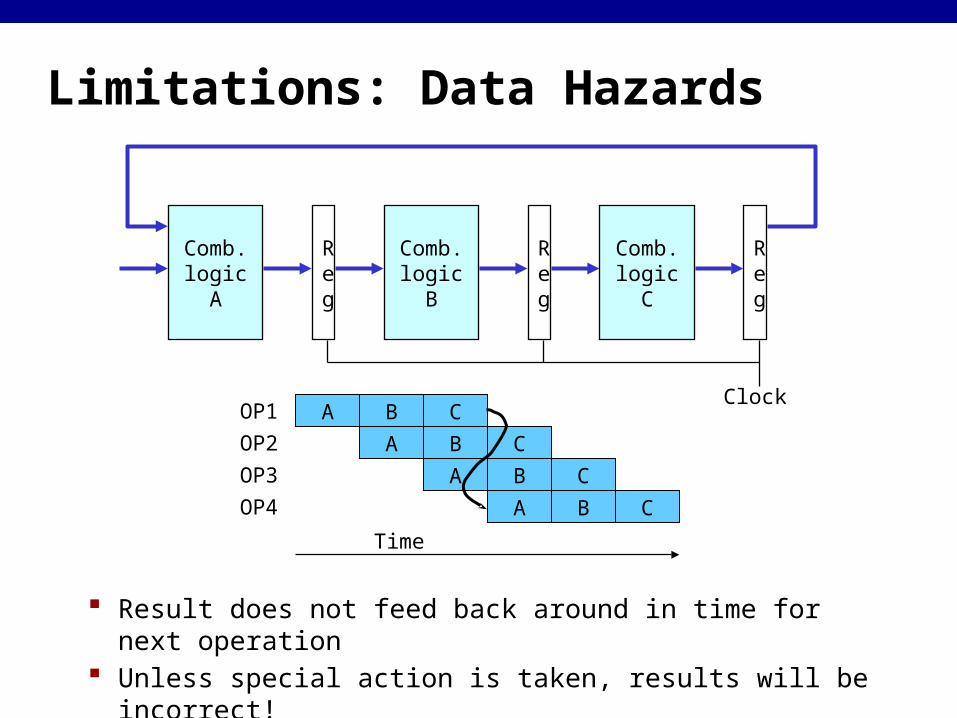
Pipelining Unpipelined
Cannot start new operation until previous one completes 3-way pipelined
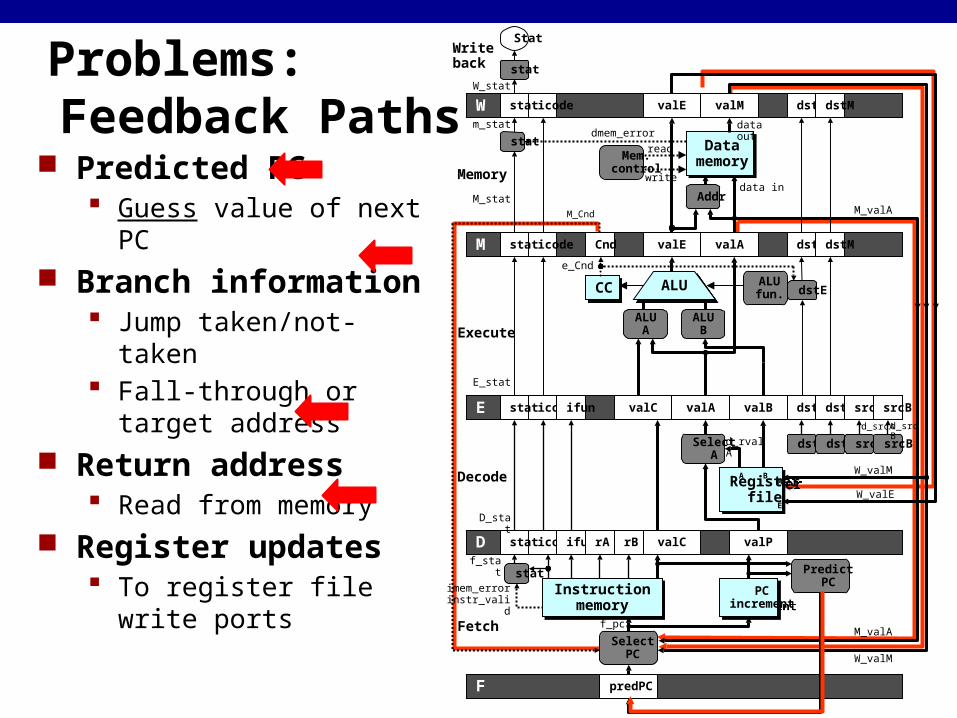
Branch information Jump taken/not-taken Fall-through or target
address Return address
Read from memory Register updates
To register file write ports
E
M
W
F
D
Instructionmemory
Instructionmemory
PCincrement
PCincrement
Registerfile
Registerfile
ALUALU
Datamemory
Datamemory
SelectPC
rB
dstE dstMSelectA
ALUA
ALUB
Mem.control
Addr
srcA srcB
read
write
ALUfun.
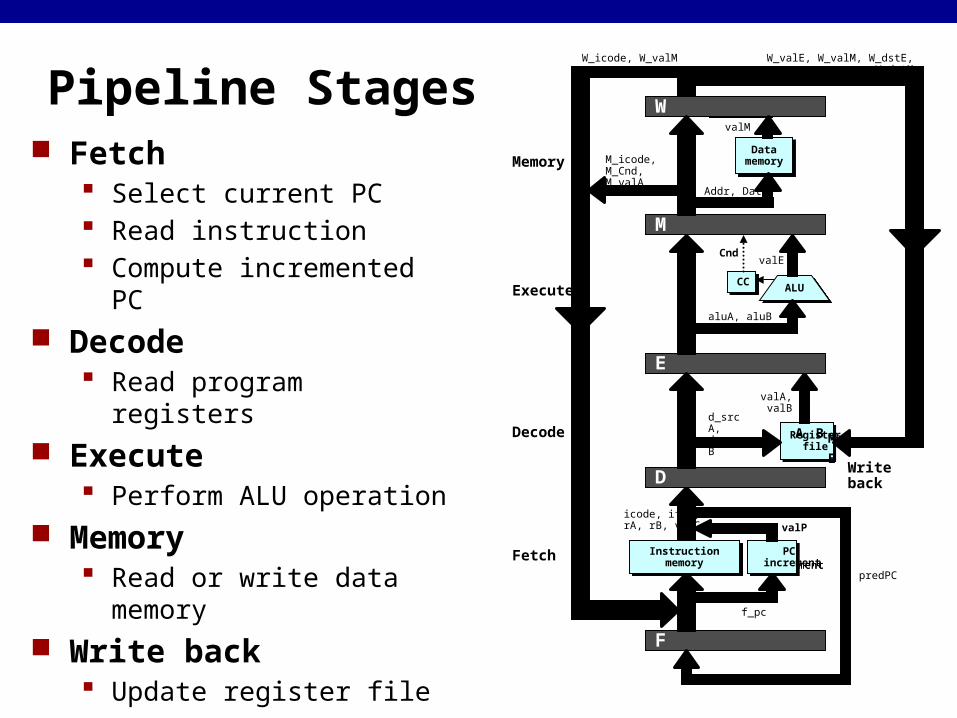
Fetch
Decode
Execute
Memory
icode
data out
data in
A BM
E
M_valA
W_valM
W_valE
M_valA
W_valM
d_rvalA
f_pc
PredictPC
valE valM dstE dstM
Cndicode valE valA dstE dstM
icode ifun valC valA valB dstE dstMsrcA srcB
valC valPicode ifun rA
predPC
CCCC
d_srcBd_srcA
e_Cnd
M_Cnd
stat
stat
stat
stat
statimem_error
instr_valid
stat
dstE
dmem_errorm_stat
W_stat
M_stat
E_stat
D_stat
f_stat
Writeback stat
Stat
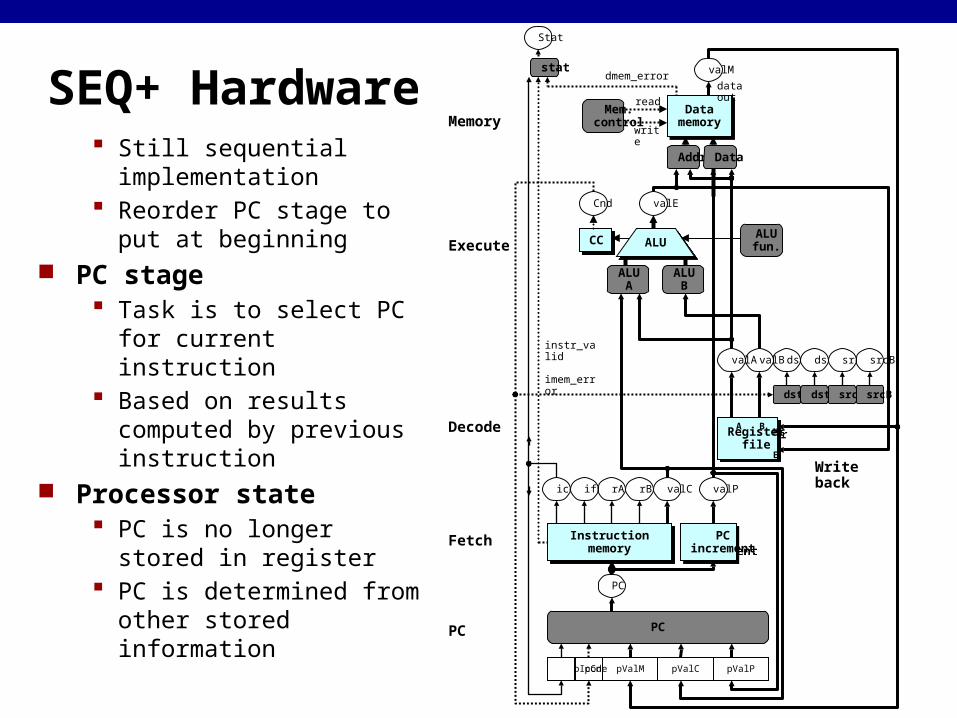
Predicting the PC
Pipeline timing requires next instruction fetch to begin one cycle after current instruction is fetched Not enough time to determine next
instruction in all cases Can be done for all but conditional
jumps, return Solution for conditional jumps: guess
outcome + continue Recover later if prediction was
incorrectPC
incrementPC
increment
CCCCALUALU
Datamemory
Datamemory
Fetch
Decode
Execute
Memory
Write back
Registerfile
RegisterfileA B M
E
d_srcA, d_srcB
valA, valB
aluA, aluB
CndvalE
Addr, Data
valM
W_valE, W_valM, W_dstE, W_dstMW_icode, W_valM
icode, ifun,rA, rB, valC
E
M
W
F
D
valP
f_pc
predPC
Instructionmemory
Instructionmemory
M_icode, M_Cnd, M_valA
Simple Prediction Strategy Instructions that don’t transfer control
Next PC is always valP (no guess required) Call and unconditional jumps
Next PC is always valC (no guess required) Conditional jumps
Could predict next PC to be valC (branch target) Correct only if branch is taken (~60% of time)
Could predict next PC to be valP (sequential successor) Correct only if branch not taken (~40% of time)
Could predict taken if forward, not-taken if backward Correct ~65% of time
Return instruction Don’t try to predict (Why? What would be required?)
Branch Misprediction Example
Should execute only first 7 instructions Our predictor will guess the branch will be taken What must be done to recover?
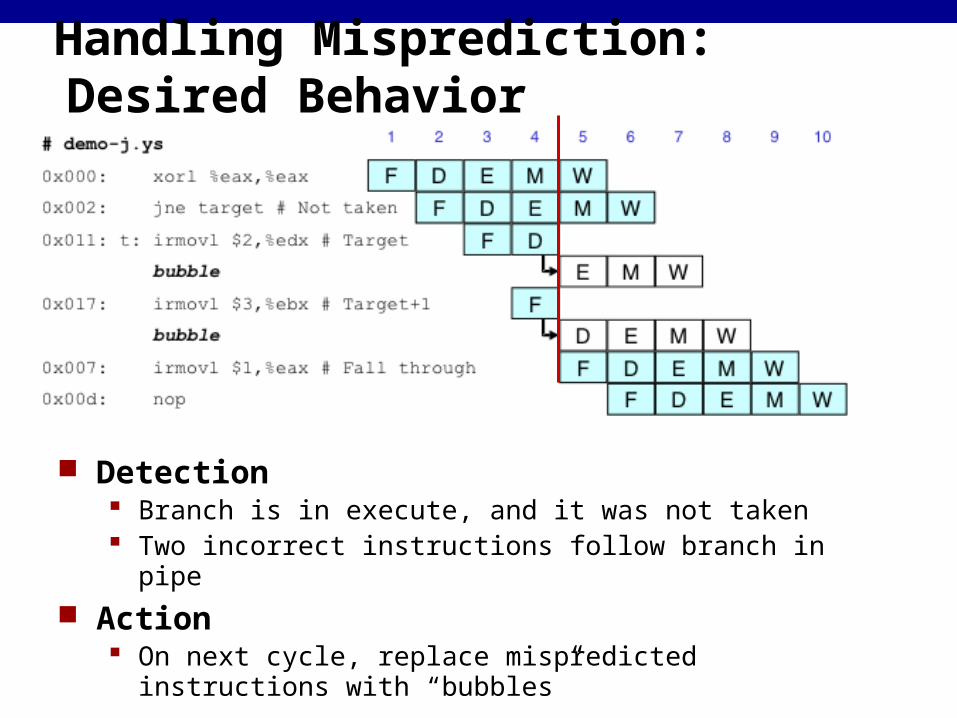
0x000: xorl %eax,%eax 0x002: jne t # Not taken 0x007: irmovl $1, %eax # Fall through 0x00d: nop 0x00e: nop 0x00f: nop 0x010: halt 0x011: t: irmovl $2, %edx # Target (Should not execute) 0x017: irmovl $3, %ebx # Should not execute 0x01d: irmovl $4, %edx # Should not execute
Handling Misprediction: Desired Behavior
Detection Branch is in execute, and it was not taken Two incorrect instructions follow branch in pipe
Action On next cycle, replace mispredicted instructions with “bubbles”
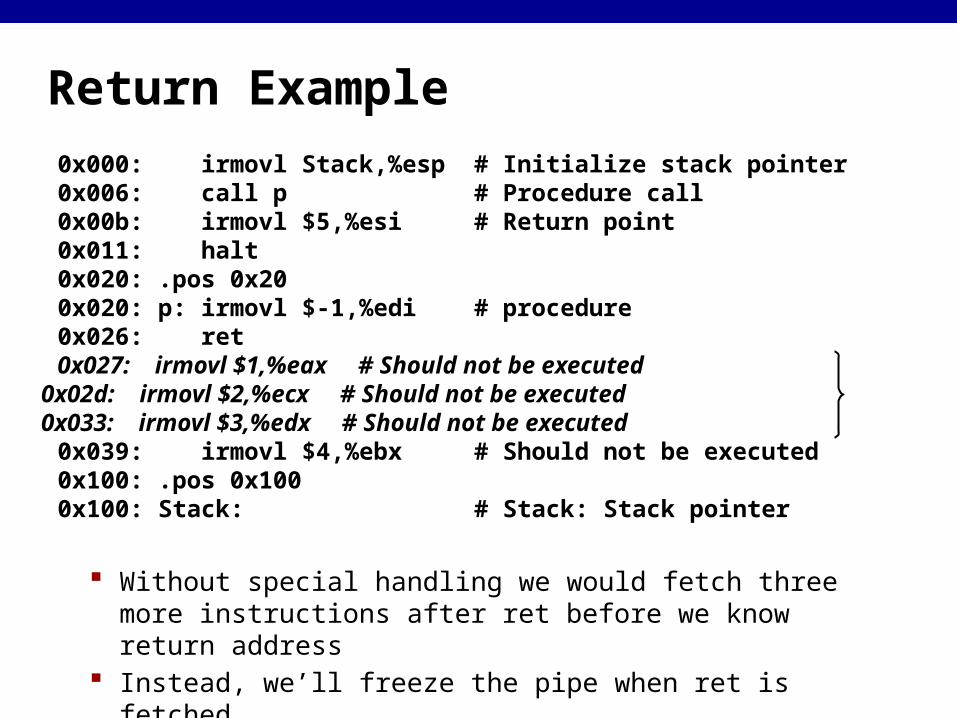
0x000: irmovl Stack,%esp # Initialize stack pointer 0x006: call p # Procedure call 0x00b: irmovl $5,%esi # Return point 0x011: halt 0x020: .pos 0x20 0x020: p: irmovl $-1,%edi # procedure 0x026: ret 0x027: irmovl $1,%eax # Should not be executed 0x02d: irmovl $2,%ecx # Should not be executed 0x033: irmovl $3,%edx # Should not be executed 0x039: irmovl $4,%ebx # Should not be executed 0x100: .pos 0x100 0x100: Stack: # Stack: Stack pointer
Return Example
Without special handling we would fetch three more instructions after ret before we know return address
Instead, we’ll freeze the pipe when ret is fetched
0x026: ret F D E M
Wbubble F D E M
W
bubble F D E M W
bubble F D E M W
0x00b: irmovl $5,%esi # Return F D E M W
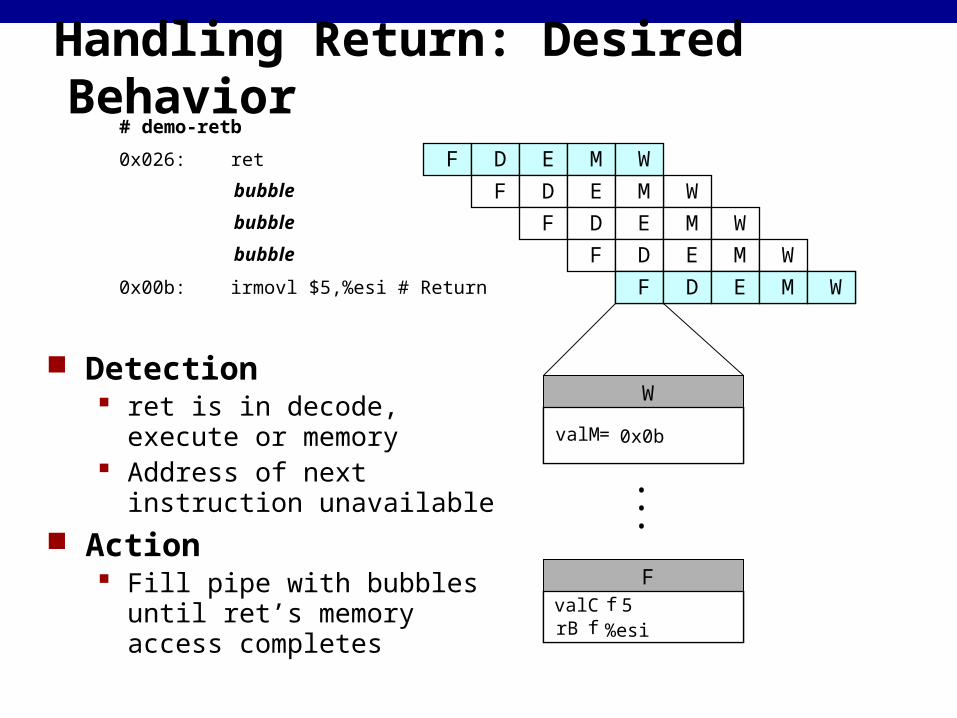
# demo-retb
F D E M W
FvalC f 5rB f %esi
FvalC f 5rB f %esi
W
valM = 0x0b
W
valM = 0x0b
•••
Handling Return: Desired Behavior
Detection ret is in decode, execute or
memory Address of next instruction
unavailable Action
Fill pipe with bubbles until ret’s memory access completes
Pipeline Operation
irmovl $1,%eax #I1
1 2 3 4 5 6 7 8 9
F D E M
Wirmovl $2,%ecx #I2 F D E M
W
irmovl $3,%edx #I3 F D E M W
irmovl $4,%ebx #I4 F D E M W
halt #I5 F D E M W
Cycle 5
W
I1
M
I2
E
I3
D
I4
F
I5
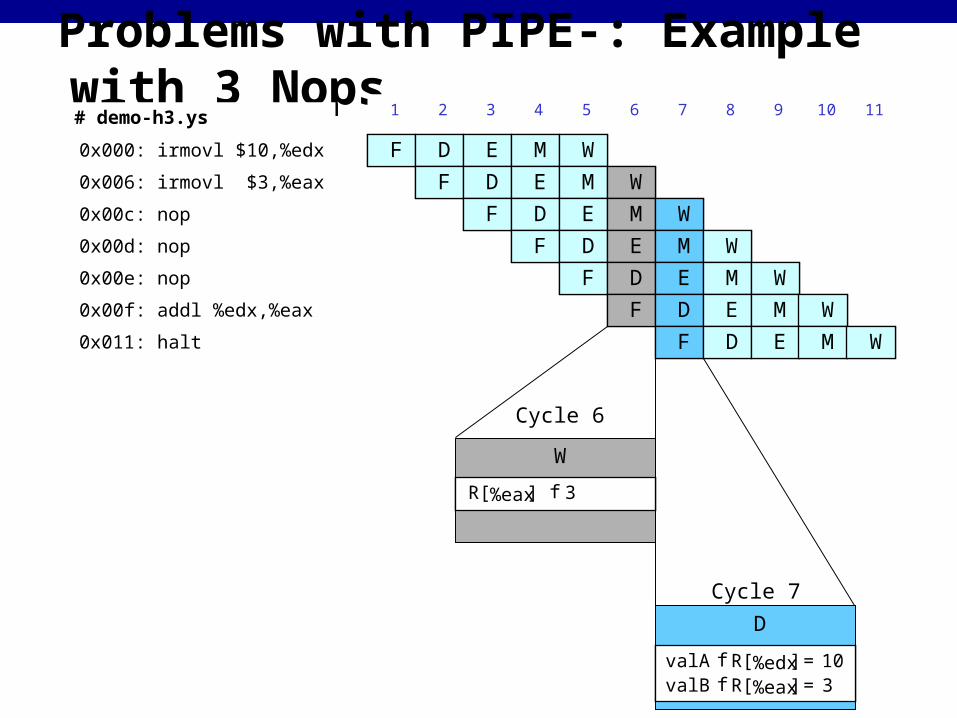
Problems with PIPE-: Example with 3 Nops
0x000: irmovl $10,%edx
1 2 3 4 5 6 7 8 9
F D E M WF D E M W
0x006: irmovl $3,%eax F D E M WF D E M W
0x00c: nop F D E M WF D E M W
0x00d: nop F D E M WF D E M W
0x00e: nop F D E M WF D E M W
0x00f: addl %edx,%eax F D E M WF D E M W
10
W
R[%eax] f 3
W
R[%eax] f 3
D
valA f R[%edx] = 10valB f R[%eax] = 3
D
valA f R[%edx] = 10valB f R[%eax] = 3
# demo-h3.ys
Cycle 6
11
0x011: halt F D E M WF D E M W
Cycle 7
Example: 2 Nops
0x000: irmovl $10,%edx
1 2 3 4 5 6 7 8 9
F D E M WF D E M W
0x006: irmovl $3,%eax F D E M WF D E M W
0x00c: nop F D E M WF D E M W
0x00d: nop F D E M WF D E M W
0x00e: addl %edx,%eax F D E M WF D E M W
0x010: halt F D E M WF D E M W
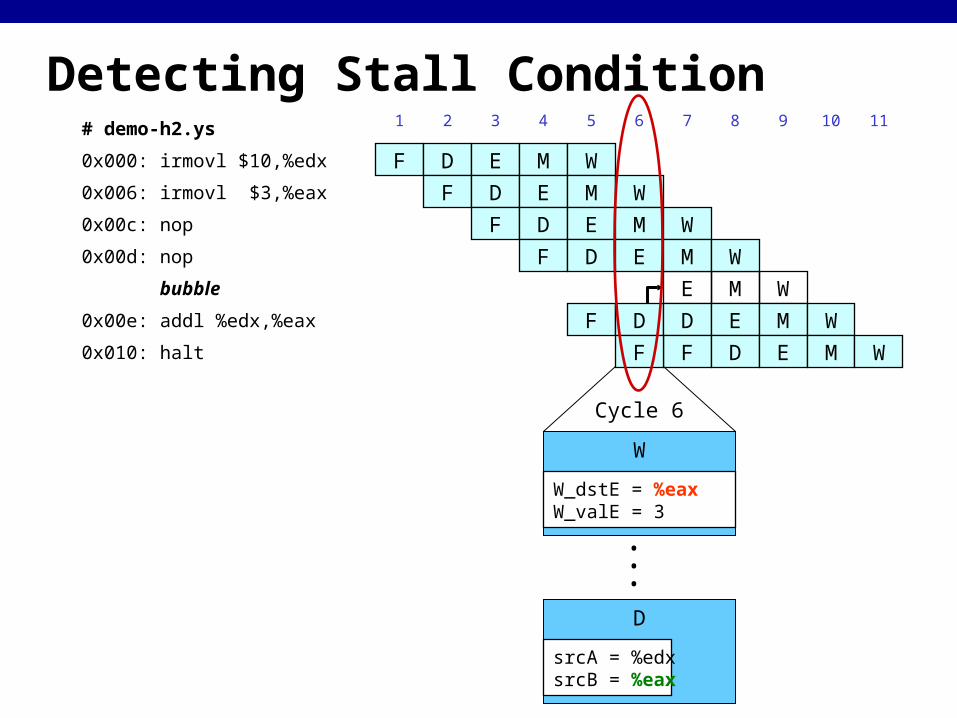
10# demo-h2.ys
W
R[%eax] f 3
D
valA f R[ %edx] = 10valB f R[ %eax] = 0
•••
W
R[%eax] f 3
W
R[%eax] f 3
D
valA fR[% edx] = 10valB fR[% eax] = 0
D
valA fR[% edx] = 10valB fR[% eax] = 0
•••
Cycle 6
Error
Example: 1 Nop0x000: irmovl $10,%edx
1 2 3 4 5 6 7 8 9
F D E M
W0x006: irmovl $3,%eax F D E M
W
0x00c: nop F D E M WF D E M W
0x00d: addl %edx,%eax F D E M WF D E M W
0x00f: halt F D E M WF D E M W
# demo-h1.ys
W
R[%edx] f 10
W
R[%edx] f 10
D
valA f R[%edx] = 0valB f R[%eax] = 0
D
valA f R[%edx] = 0valB f R[%eax] = 0
•••
Cycle 5
Error
MM_valE = 3M_dstE = %eax
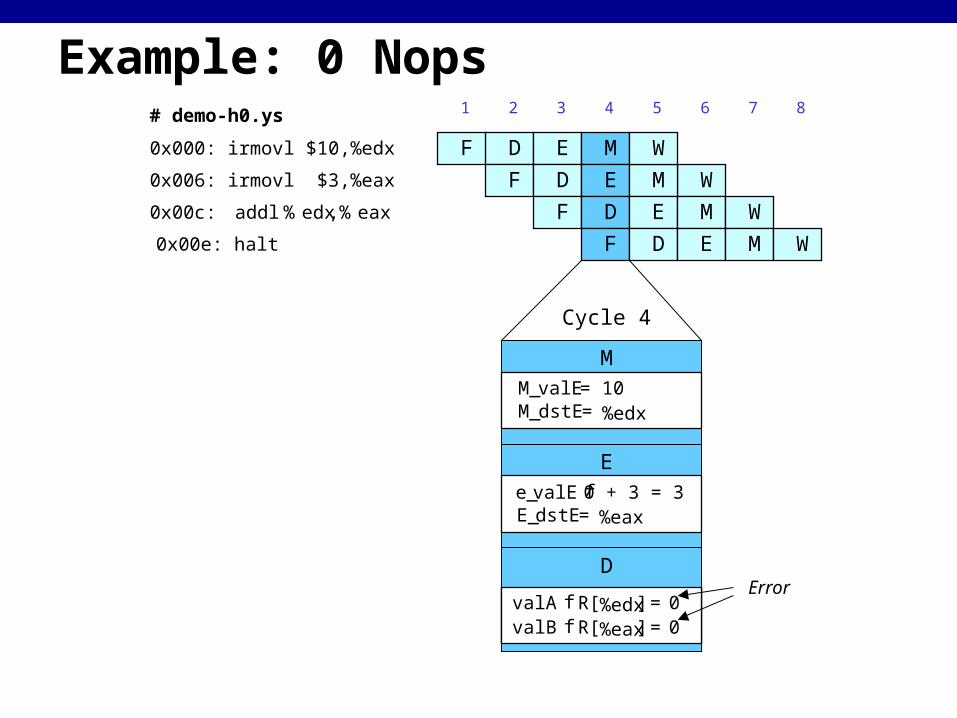
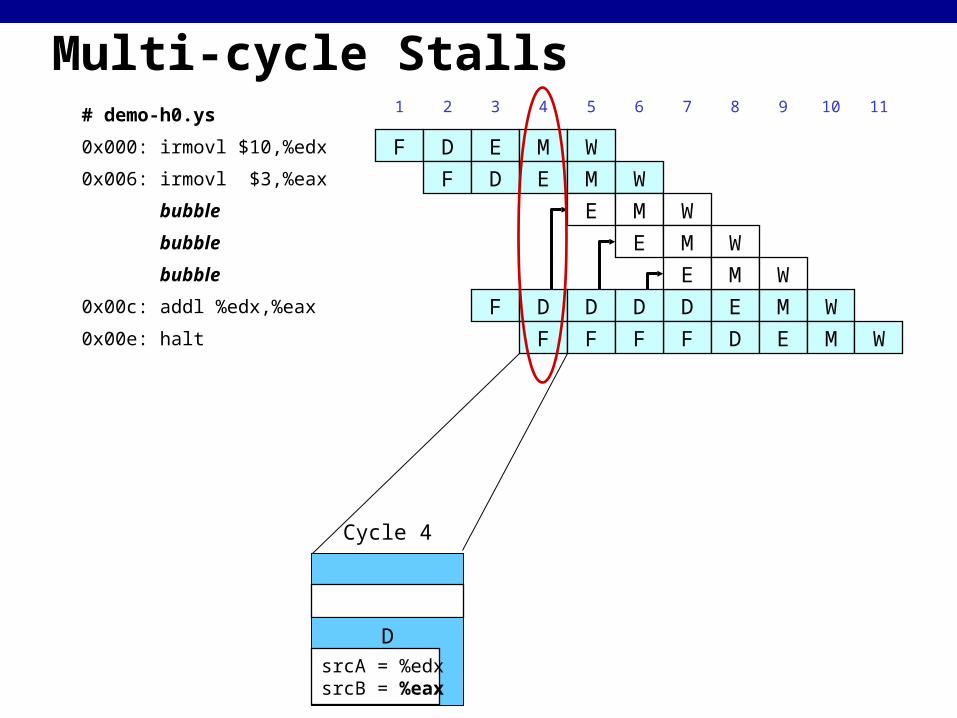
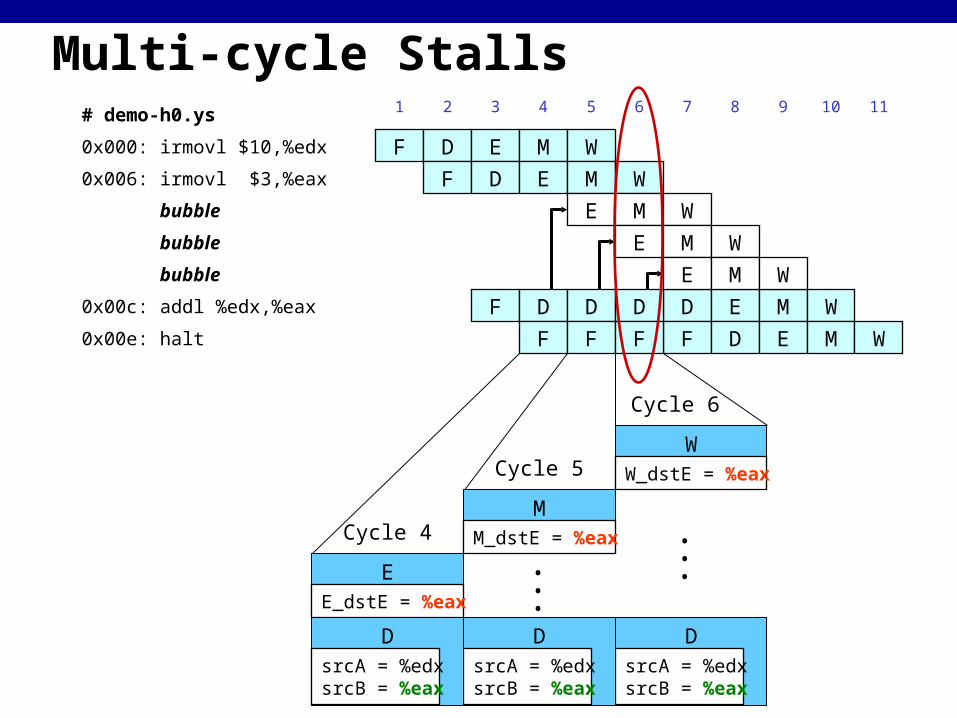
Example: 0 Nops
0x000: irmovl $10,%edx
1 2 3 4 5 6 7 8
F D E M
W0x006: irmovl $3,%eax F D E M
W
F D E M W0x00c: addl % edx,% eax
F D E M W0x00e: halt
# demo-h0.ys
E
D
valA f R[%edx] = 0valB f R[%eax] = 0
D
valA f R[%edx] = 0valB f R[%eax] = 0
Cycle 4
Error
MM_valE = 10M_dstE = %edx
e_valE f 0 + 3 = 3 E_dstE = %eax
Hazard Solution 1: Stalling
If instruction that reads register follows too closely after instruction that writes same register, delay reading instruction
Delay or stall always takes place in decode stage Following instruction also delayed in fetch, but just one “stall cycle” tallied
Stall = dynamically injecting nop (bubble) into execute stage Hazard we get wrong answer without special action
0x000: irmovl $10,%edx
1 2 3 4 5 6 7 8 9
F D E M W
0x006: irmovl $3,%eax F D E M W
0x00c: nop F D E M W
bubble
F
E M W
0x00e: addl %edx,%eax D D E M W
0x010: halt F D E M W
10# demo-h2.ys
F
F D E M W0x00d: nop
11
Stalls
Detection Write is pending for a src
register srcA or srcB (not 0xF)
matches dstE or dstM in execute, memory, or write-back stages