COMPUTATIONAL STUDY FOR THE NUMERICAL RESOLUTION OF THERMAL AND FLUID DYNAMIC PROBLEMS. Studies: MASTER’S DEGREE IN SPACE AND AERONAUTICAL ENGINEERING Student: Cesar David Navas Prada Director: Carlos David Pérez Segarra Codirector: Asensio Oliva Llena Thesis Call: QP 2017-2018 Document: Attachments Report Barcelona, September 2018
Transcript
COMPUTATIONAL STUDY FOR THE NUMERICAL
RESOLUTION OF THERMAL AND FLUID DYNAMIC
PROBLEMS.
Studies: MASTER’S DEGREE IN SPACE AND AERONAUTICAL
ENGINEERING
Student: Cesar David Navas Prada
Director: Carlos David Pérez Segarra
Codirector: Asensio Oliva Llena
Thesis Call: QP 2017-2018
Document: Attachments Report
Barcelona, September 2018
Master Final Thesis Attachments Report
Cesar David Navas Prada 2
Master Final Thesis Attachments Report
Cesar David Navas Prada 3
CONTENTS
List of Figures ................................................................................................................... 5
List of Tables .................................................................................................................... 6
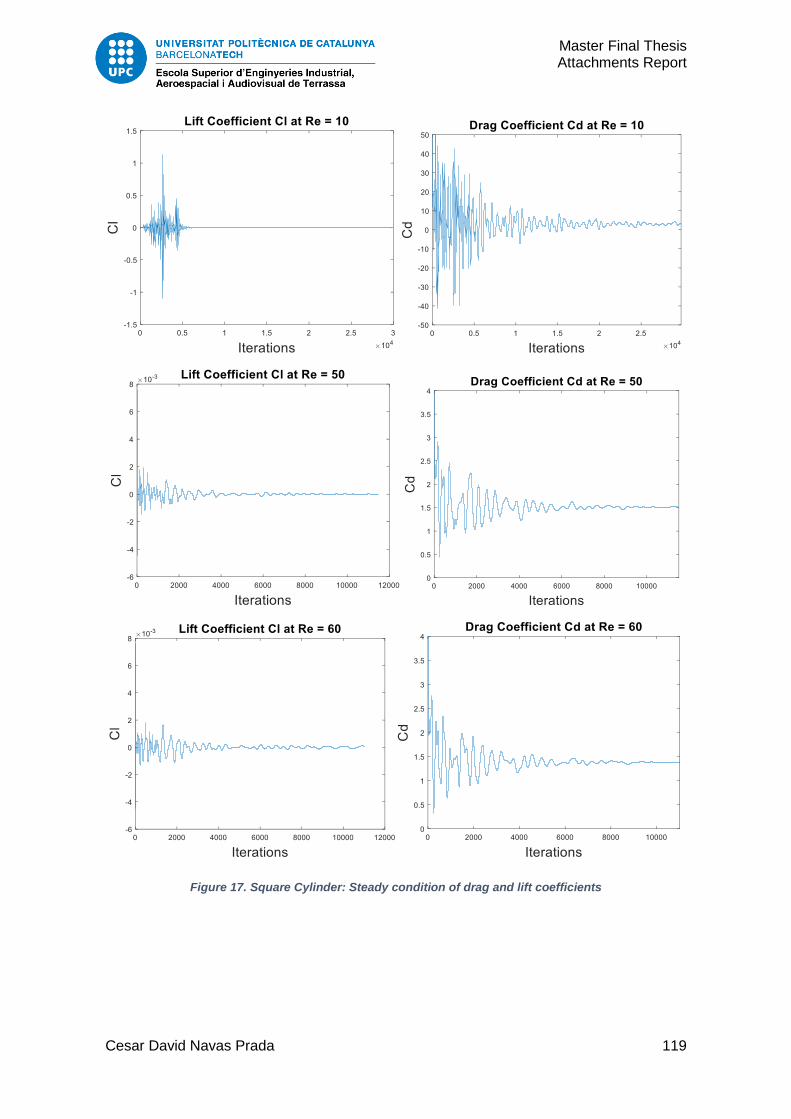
Figure 17. Square Cylinder: Steady condition of drag and lift coefficients ..................... 119
Figure 18. Burgers Equation: Energy spectrum at Re = 1 ............................................. 120
Figure 19. Burgers Equation: Energy spectrum at Re = 100 ......................................... 120
Figure 20. Burgers Equation: Energy spectrum at Re = 300 ......................................... 121
Master Final Thesis Attachments Report
Cesar David Navas Prada 6
LIST OF TABLES
Table 1. Software licenses used during the study ............................................................. 7
Master Final Thesis Attachments Report
Cesar David Navas Prada 7
INTRODUCTION
1. INTRODUCTION
This document contains the algorithms self-developed during this study, and the graphical
results that were not relevant enough for the conclusions in the main final report.
It is important to highlight that all cases of study use some generic algorithms. These
generic algorithms were developed as functions in MATLAB. For the convection-diffusion
problems the numerical schemes and numerical solver are generic algorithms, and for FSM
the generics algortihms are the R(u,v) vector and Poisson equation solution code. Specific
functions were required for each case of study regarding the individual equiremnts of the
cases, these MATLAB functions will be presented separered for ech case as well.
Consequently, some extra graphical results are showed and lastly, the document also
includes the software description and the license permits required for this study.
1.1. Software
This study was performed mainly in a computational environment; therefore, the licenses
and software used during this study are exposed in Table 1. The algorithms were solely
conducted and created in Matlab and the graphical results were obtained from this software
too. Microsoft office package was used as well along with Mendeley Desktop software for
the creation and elaboration of the reports.
Software License Work
Microsoft Office
(Word) 2016
Obtained with the purchase of the
Computer Elaboration of the report
Microsoft Office
(Excel) 2016
Obtained with the purchase of the
Computer
Elaboration of tables and
graphics
Matlab R2017b
Free software obtained through
the agreement of Universitat
Politecnica de Catalunya
Elaboration of codes and
data-results
Mendeley Desktop
1.18
Free software obtained through
the agreement of Universitat
Politecnica de Catalunya
Reference creator and
manager
Table 1. Software licenses used during the study
Master Final Thesis Attachments Report
Cesar David Navas Prada 8
Master Final Thesis Attachments Report
Cesar David Navas Prada 9
ATTACHMENT I
DEVELOPED ALGORITHMS
2. ATTACHMENT I – DEVELOPED ALGORITHMS
2.1. Convection-Diffusion Generic Algorithms
2.1.1. Numerical Schemes
2.1.1.1. High-Resolution Schemes
function [phi_f_hrs] = HRS(Mesh,phi_0,sc,dir) % HRS: Finds phi at the desired horizontal face for high resolution
schemes % (Upwind, Second-order Upwind, QUICK, Fromm, SMART) % % INPUTS: % - Mesh: N [#] Number of nodes in axis X % M [#] Number of nodes in axis Y % X [m] Nodes' position in axis X % Y [m] Nodes' position in axis Y % X_f [m] Faces' position in axis X % Y_f [m] Faces' position in axis Y % u_f [m/s] Face's velocity in direction X % v_f [m/s] Face's velocity in direction Y % - phi_0: Phi (Pressure) in the prior time-step % - sc: Numerical Scheme % - dir: Face where the value of phi is desired % % OUTPUTS: % - phi_f_hrs: Phi of high resolution scheme at the evaluated face % % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
function [phi_f_uds] = UDS(Mesh,phi_0,dir) % UDS: Finds phi at the desired horizontal face for low resolution
scheme (upwind) % % INPUTS: % - Mesh: N [#] Number of nodes in axis X % M [#] Number of nodes in axis Y % u_f [m/s] Face's velocity in direction X % v_f [m/s] Face's velocity in direction Y % - phi_0: Phi (Pressure) in the prior time-step % - dir: Face where the value of phi is desired % % OUTPUTS: % - phi_f_uds: Phi of low resolution scheme (upwind) at the evaluated
face
Master Final Thesis Attachments Report
Cesar David Navas Prada 14
% % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
%% Parameters Definition
N = Mesh.N; M = Mesh.M;
%% UDS phi_f_uds = zeros(M,N);
for j = 2:M-1 for i = 2:N-1
if dir == "e"
u_f = Mesh.u_f;
if u_f(j,i) < 0
phi_f_uds(j,i) = phi_0(j,i+1);
else
phi_f_uds(j,i) = phi_0(j,i);
end
elseif dir == "w"
u_f = Mesh.u_f;
if u_f(j,i) < 0
phi_f_uds(j,i) = phi_0(j,i);
else
phi_f_uds(j,i) = phi_0(j,i-1);
end
elseif dir == "n"
u_f = Mesh.v_f;
if u_f(j,i) < 0
phi_f_uds(j,i) = phi_0(j-1,i);
else
phi_f_uds(j,i) = phi_0(j,i);
Master Final Thesis Attachments Report
Cesar David Navas Prada 15
end
elseif dir == "s"
u_f = Mesh.v_f;
if u_f(j,i) < 0
phi_f_uds(j,i) = phi_0(j,i);
else
phi_f_uds(j,i) = phi_0(j+1,i);
end
else
error("Choose the correct direction")
end end end
2.1.2. Numerical Solvers
2.1.2.1. Point-by-Point
function [phi]=solvphi_pbp(Mesh,Coeff,phi_0) % solvphi_pbp: Solves the set of equations to find phi using % point-by-point method % % INPUTS: % - Mesh: N [#] Total nodes in axis X % M [#] Total nodes in axis Y % - Coeff: A_e Coefficient east node % A_w Coefficient west node % A_n Coefficient north node % A_s Coefficient south node % A_p Coefficient center node % b Resultant coefficient % - phi_0: Phi in the prior time-step % % OUTPUTS: % - phi [Pa]: Variable % % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
function [phi]=solvphi_lbl(Mesh,Coeff,phi_0) % solvphi_lbl: Solves the set of equations to find phi using % line-by-line method with a combination of rows and
columns % directions % % INPUTS: % - Mesh: N [#] Total nodes in axis X % M [#] Total nodes in axis Y % - Coeff: A_e Coefficient east node % A_w Coefficient west node % A_n Coefficient north node % A_s Coefficient south node % A_p Coefficient center node % b Resultant coefficient % - phi_0: Phi in the prior time-step % % OUTPUTS: % - phi: Variable % % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
% Graphic of phi in the domain figure; contourf(X(1,:),Y(:,1),phi,'LineStyle','none','LevelStep',0.01); xlabel('x [m]','Fontsize',18) ylabel('y [m]','Fontsize',18)
if i == 1 title('\rho/\Gamma=10','Fontsize',18) elseif i == 2 title('\rho/\Gamma=10^3','Fontsize',18) else title('\rho/\Gamma=10^6','Fontsize',18) end
colorbar
T_time(i) = max(Time);
end
%% Plotting
% Plot graphic for x desired at different rho/gamma figure; color = {'b' 'r' 'g'};
fprintf('Time of convergence rho/gamma = 10 is %d [s]\n',T_time(1)) fprintf('Time of convergence rho/gamma = 10^3 is %d [s]\n',T_time(2)) fprintf('Time of convergence rho/gamma = 10^6 is %d [s]\n',T_time(3)) fprintf('Total time is %d [s]\n',sum(T_time))
2.1.3.2. Mesh Code
function [Mesh] = mesh(Data,n,m) % mesh: Creates a node-centered and structured mesh for a % 2D case with dimensions (L by H) and (n by m) number of control % volumes % % INPUTS: % - Data: L [m] Length in Axis X % H [m] Height in Axis Y % V0 [m/s] Initial velocity % alpha [degree] Angle for wall conditions % - n [#] Control volumes in axis X % - m [#] Control volumes in axis Y % % OUTPUTS: % - Mesh: N [#] Number of nodes in axis X % M [#] Number of nodes in axis Y % n [#] Control volumes in axis X % m [#] Control volumes in axis Y % dx [m] Control volume's Lenght (X) % dy [m] Control volume's Height (Y) % X [m] Nodes' position in axis X % Y [m] Nodes' position in axis Y % X_f [m] Faces' position in axis X % Y_f [m] Faces' position in axis Y % u [m/s] Node's velocity in direction X % v [m/s] Node's velocity in direction Y % u_f [m/s] Face's velocity in direction X % v_f [m/s] Face's velocity in direction Y % DeltaX [m] Control volume's length (X) % DeltaY [m] Control volume's Height (Y) % deltaX [m] Central node's distances (X) % deltaY [m] Central node's distances (Y) % % Case: DIAGONAL FLOW % Student: Cesar David Navas Prada
Master Final Thesis Attachments Report
Cesar David Navas Prada 23
% University: Universitat Politecnica de Catalunya
%% Parameters Definition
L = Data.L; H = Data.H; V0 = Data.V0; alpha = Data.alpha;
%% Geometry of the mesh
dx = L/n; % Control volume's Lenght (X) dy = H/m; % Control volume's Height (Y)
%% Number of nodes
N = n + 2; % Number of nodes in axis X M = m + 2; % Number of nodes in axis Y
%% Node's position X = zeros(M,N); Y = zeros(M,N);
function [vel] = vel_Diagonal(V0,alpha,dir) %vel_Diagonal: Finds the velocity field at each node and face
exclusively % for the Diagonal Flow case % % INPUTS: % - V0 [m/s]: Initial velocity % - alpha [Radian]: Wall condition's angle % - dir: Face where the value of phi is desired % % OUTPUTS: % - vel : Velocity at node or face % % Case: DIAGONAL FLOW % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
%% Velocity
if dir == "x"
vel = V0*cos(alpha);
elseif dir == "y"
vel = V0*sin(alpha);
else
error("choose the correct direction")
end
2.1.3.4. Coefficients Code
function [C_Coeff] = C_coeff(Mesh,Data,gamma,rho) % C_coeff: Finds the non time-dependent (Constant) coefficients for the % given parameters at each node in the main mesh % % INPUTS: % - Mesh: N [#] Number of nodes in axis X % M [#] Number of nodes in axis Y % DeltaX [m] Control volume's length (X) % DeltaY [m] Control volume's Height (Y) % deltaX [m] Central node's distances (X) % deltaY [m] Central node's distances (Y) % - Data: alpha [Radian] Wall condition's angle % V0 [m/s] Initial velocity % - gamma : Diffusion coefficient % - rho : [Kg/m^3] Fluid's Density %
Master Final Thesis Attachments Report
Cesar David Navas Prada 28
% OUTPUTS: % - C_Coeff: A_e Coefficient east node % A_w Coefficient west node % A_n Coefficient north node % A_s Coefficient south node % A_p Coefficient center node % A_p0 Coefficient time-step % b Resultant coefficient % b_dc Coefficient deferred correction % Fe Flow rate east face % Fw Flow rate west face % Fn Flow rate north face % Fs Flow rate south face % % Case: DIAGONAL FLOW % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
%% Paremeters Definition
N = Mesh.N; M = Mesh.M; DeltaX = Mesh.DeltaX; DeltaY = Mesh.DeltaY; deltaX = Mesh.deltaX; deltaY = Mesh.deltaY;
function [Coeff] = T_coeff(Mesh,Data,C_Coeff,gamma,rho,phi_0,z) % T_coeff: Finds the time-dependent coefficients for the % given parameters at each node in the main mesh % % INPUTS: % - Mesh: N [#] Number of nodes in axis X % M [#] Number of nodes in axis Y % DeltaX [m] Control volume's length (X) % DeltaY [m] Control volume's Height (Y) % - Data: d_t [s] Time Step % sc Numerical Scheme (upwind, upwind2, quick, fromm, smart)
Master Final Thesis Attachments Report
Cesar David Navas Prada 31
% - C_Coeff: A_e Coefficient east node % A_w Coefficient west node % A_n Coefficient north node % A_s Coefficient south node % A_p Coefficient center node % A_p0 Coefficient time-step % b Resultant coefficient % b_dc Coefficient deferred correction % Fe Flow rate east face % Fw Flow rate west face % Fn Flow rate north face % Fs Flow rate south face % - gamma : Diffusion coefficient % - rho : [Kg/m^3] Fluid's Density % - phi_0: Phi in a prior time-step % - z: Countant parameter % % OUTPUTS: % - Coeff: A_e Coefficient east node % A_w Coefficient west node % A_n Coefficient north node % A_s Coefficient south node % A_p Coefficient center node % A_p0 Coefficient time-step % b Resultant coefficient % % Case: DIAGONAL FLOW % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
%% Paremeters Definition
N = Mesh.N; M = Mesh.M; DeltaX = Mesh.DeltaX; DeltaY = Mesh.DeltaY;
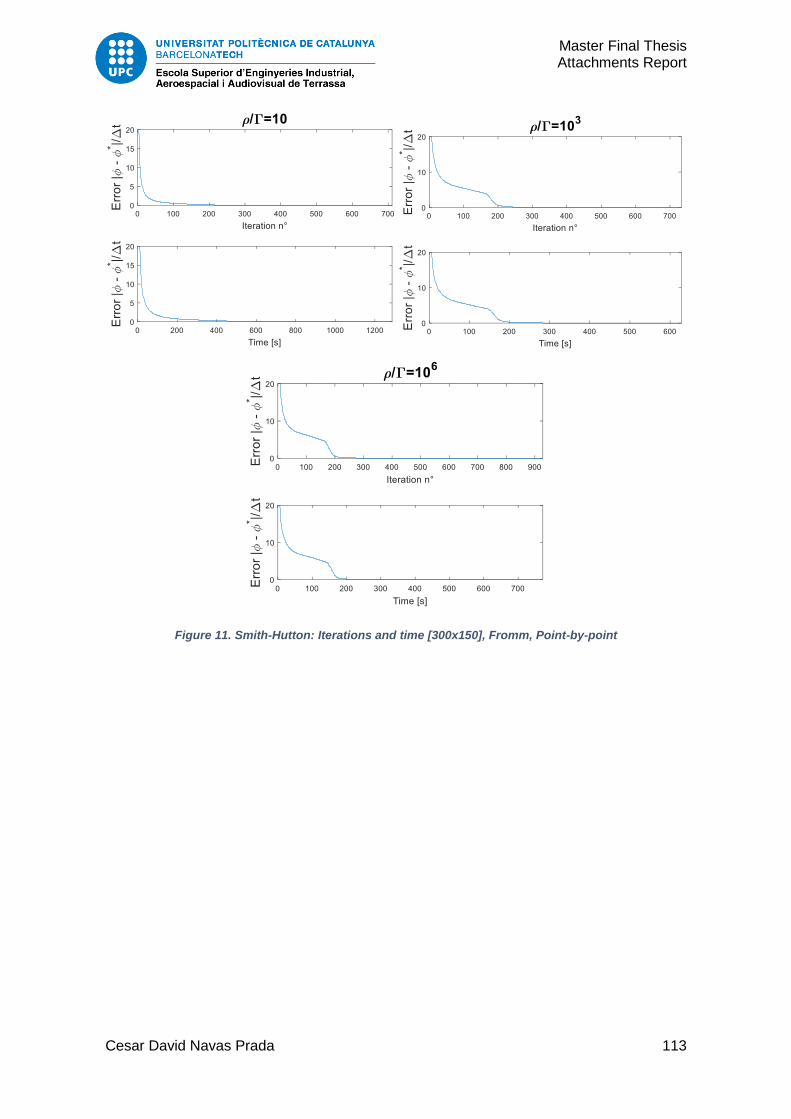
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%% SMITH-HUTTON %%%%%%%%%%%%%%% %%%%%%%%%% Cesar David Navas Prada %%%%%%%%%% %%%%%%%%%%%%%%%% MAIN SCRIPT %%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%% Input Parameters
Data.L = 2; % [m] length in axis X Data.H = 1; % [m] Hight in axis Y Data.d_t = 0.1; % [s] Time Step Data.alpha = 10; % [degree] Angle for wall conditions rho_gamma = [10 1e3 1e6]; % Ratio density/diffusive coefficient gamma = 1; % Diffusive coefficient rho = rho_gamma*gamma; % [Kg/m^3] Density Data.sc = "upwind"; % Numerical Scheme ( upwind, upwind2,
fprintf('Time of convergence rho/gamma = 10 is %d [s]\n',T_time(1)) fprintf('Time of convergence rho/gamma = 10^3 is %d [s]\n',T_time(2)) fprintf('Time of convergence rho/gamma = 10^6 is %d [s]\n',T_time(3)) fprintf('Total time is %d [s]\n',sum(T_time))
2.1.4.2. Mesh Code
function [Mesh] = mesh(Data,n,m) % mesh: Creates a node-centered and structured mesh for a % 2D case with dimensions (L by H) and (n by m) number of control
Master Final Thesis Attachments Report
Cesar David Navas Prada 36
% volumes % % INPUTS: % - Data: L [m] Length in Axis X % H [m] Height in Axis Y % - n [#] Control volumes in axis X % - m [#] Control volumes in axis Y % % OUTPUTS: % - Mesh: N [#] Number of nodes in axis X % M [#] Number of nodes in axis Y % n [#] Control volumes in axis X % m [#] Control volumes in axis Y % dx [m] Control volume's Lenght (X) % dy [m] Control volume's Height (Y) % X [m] Nodes' position in axis X % Y [m] Nodes' position in axis Y % X_f [m] Faces' position in axis X % Y_f [m] Faces' position in axis Y % u [m/s] Node's velocity in direction X % v [m/s] Node's velocity in direction Y % u_f [m/s] Face's velocity in direction X % v_f [m/s] Face's velocity in direction Y % DeltaX [m] Control volume's length (X) % DeltaY [m] Control volume's Height (Y) % deltaX [m] Central node's distances (X) % deltaY [m] Central node's distances (Y) % % Case: SMITH-HUTTON % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
%% Parameters Definition
L = Data.L; H = Data.H;
%% Geometry of the mesh
dx = L/n; % Control volume's Lenght (X) dy = H/m; % Control volume's Height (Y)
%% Number of nodes
N = n + 2; %Number of nodes in axis X M = m + 2; %Number of nodes in axis Y
%% Node's position X = zeros(M,N); Y = zeros(M,N);
function [vel] = vel_SH(A,B) %vel_SH: Finds the velocity field at each node and face exclusively % for the Smith-Hutton case % % INPUTS: % - A: Single component A of the velocity field % - B: Squared component B of the velocity field % % OUTPUTS: % - vel : Velocity field % % Case: SMITH-HUTTON % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
%% Velocity
vel = 2*A.*(1 - B.^2);
2.1.4.4. Coefficients Code
function [C_Coeff] = C_coeff(Mesh,Data,gamma,rho) % C_coeff: Finds the non time-dependent (Constant) coefficients for the % given parameters at each node in the main mesh % % INPUTS: % - Mesh: N [#] Number of nodes in axis X
Master Final Thesis Attachments Report
Cesar David Navas Prada 41
% M [#] Number of nodes in axis Y % DeltaX [m] Control volume's length (X) % DeltaY [m] Control volume's Height (Y) % deltaX [m] Central node's distances (X) % deltaY [m] Central node's distances (Y) % u_f [m/s] Face's velocity in direction X % v_f [m/s] Face's velocity in direction Y % - Data: alpha [Radian] Wall condition's angle % - gamma : Diffusion coefficient % - rho : [Kg/m^3] Fluid's Density % % OUTPUTS: % - C_Coeff: A_e Coefficient east node % A_w Coefficient west node % A_n Coefficient north node % A_s Coefficient south node % A_p Coefficient center node % A_p0 Coefficient time-step % b Resultant coefficient % b_dc Coefficient deferred correction % Fe Flow rate east face % Fw Flow rate west face % Fn Flow rate north face % Fs Flow rate south face % % Case: SMITH-HUTTON % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
%% Paremeters Definition
N = Mesh.N; M = Mesh.M; X = Mesh.X; DeltaX = Mesh.DeltaX; DeltaY = Mesh.DeltaY; deltaX = Mesh.deltaX; deltaY = Mesh.deltaY; u_f = Mesh.u_f; v_f = Mesh.v_f;
function [Coeff] = T_coeff(Mesh,Data,C_Coeff,gamma,rho,phi_0,z) % T_coeff: Finds the time-dependent coefficients for the % given parameters at each node in the main mesh % % INPUTS: % - Mesh: N [#] Number of nodes in axis X % M [#] Number of nodes in axis Y % DeltaX [m] Control volume's length (X) % DeltaY [m] Control volume's Height (Y) % - Data: d_t [s] Time Step % sc Numerical Scheme (upwind, upwind2, quick, fromm, smart) % - C_Coeff: A_e Coefficient east node % A_w Coefficient west node % A_n Coefficient north node % A_s Coefficient south node % A_p Coefficient center node % A_p0 Coefficient time-step % b Resultant coefficient % b_dc Coefficient deferred correction % Fe Flow rate east face % Fw Flow rate west face % Fn Flow rate north face % Fs Flow rate south face % - gamma : Diffusion coefficient % - rho : [Kg/m^3] Fluid's Density % - phi_0: Phi in a prior time-step % - z: Countant parameter % % OUTPUTS: % - Coeff: A_e Coefficient east node % A_w Coefficient west node % A_n Coefficient north node % A_s Coefficient south node % A_p Coefficient center node % A_p0 Coefficient time-step % b Resultant coefficient % % Case: SMITH-HUTTON % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%% HEAT CONDUCTION TRANSFER %%%%%%%%% %%%%%%%%%% Cesar David Navas Prada %%%%%%%%%% %%%%%%%%%%%%%%%% MAIN SCRIPT %%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%% Input Parameters
Data.tf = 10000; % [s] Total time for the study Data.beta = 1; % Explicit(1) or semi-explicit(0.5) coefficient Data.d_t = 1; % [s] Time Step P_A = [0.65 0.56]; % [m] Point A to be analized P_B = [0.74 0.72]; % [m] Point B to be analized
%% Material Properties
% Lenght and Hight Material.P1 = [0.5 0.40]; % [m] Location one Material.P2 = [0.5 0.70]; % [m] Location two Material.P3 = [1.1 0.80]; % [m] Location three
% Density Material.rho = [1500 1600 1900 2500]; % [Kg/m^3] Density
% Evolution of Point A and B temperature figure plot(0:1:Data.tf, TPA) hold on
Master Final Thesis Attachments Report
Cesar David Navas Prada 49
plot(0:1:Data.tf, TPB) xlabel('Time [s]') ylabel('Temperature [°C]') legend('Point A [0.65 0.56]','Point B [0.74 0.72]','Location','Best')
%% Saving file
fileID = fopen('2DHeatTrans_CDNP.txt','w'); fprintf(fileID,'%s %s %s\n','Time',' Point A',' Point B'); fprintf(fileID,'%.2f\t %.2f\t\t %.2f\n',[0:1:Data.tf;TPA;TPB]); fclose(fileID); toc
2.1.5.2. Mesh Code
function [Mesh] = mesh(Material,dx,dy) % mesh: Creates a node-centered and structured mesh for a % 2D case with dimensions (L by H) and (n by m) number of control % volumes % % INPUTS: % - Material: P1 [m] Location of point 1 % P2 [m] Location of point 2 % P3 [m] Location of point 3 % rho [Kg/m^3] Density % Cp [J/Kg°K] Specific heat capacity % Lambda [W/m°K] Thermal conductivity % - dx [m] Control volume's Lenght (X) % - dy [m] Control volume's Height (Y) % % OUTPUTS: % - Mesh: N [#] Number of nodes in axis X % M [#] Number of nodes in axis Y % n [#] Control volumes in axis X % m [#] Control volumes in axis Y % dx [m] Control volume's Lenght (X) % dy [m] Control volume's Height (Y) % X [m] Nodes' position in axis X % Y [m] Nodes' position in axis Y % X_f [m] Faces' position in axis X % Y_f [m] Faces' position in axis Y % DeltaX [m] Control volume's length (X) % DeltaY [m] Control volume's Height (Y) % deltaX [m] Central node's distances (X) % deltaY [m] Central node's distances (Y) % rho_n [Kg/m^3] Density at each node % Cp_n [J/Kg°K] Specific heat capacity at each node % lambda_n [W/m°K] Thermal conductivity at each node % % Case: HEAT CONDUCTION TRANSFER % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
function [C_Coeff] = C_coeff(Mesh,Data,Wall) % C_coeff: Finds the non time-dependent (Constant) coefficients for the % given parameters at each node in the main mesh % % INPUTS: % - Mesh: N [#] Number of nodes in axis X % M [#] Number of nodes in axis Y % DeltaX [m] Control volume's length (X) % DeltaY [m] Control volume's Height (Y) % deltaX [m] Central node's distances (X) % deltaY [m] Central node's distances (Y) % rho_n [Kg/m^3] Density at each node % Cp_n [J/Kg°K] Specific heat capacity at each node % - Data: beta Explicit(1) or semi-explicit(0.5) coefficient % d_t [s] Time Step % - Wall: T_base [°C] Temperature at the bottom of the control volume % % OUTPUTS: % - C_Coeff: A_e Coefficient east node % A_w Coefficient west node % A_n Coefficient north node % A_s Coefficient south node % A_p Coefficient center node % A_p0 Coefficient time-step % b Resultant coefficient % % Case: HEAT CONDUCTION TRANSFER % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
%% Paremeters Definition
N = Mesh.N; M = Mesh.M; DeltaX = Mesh.DeltaX; DeltaY = Mesh.DeltaY; deltaX = Mesh.deltaX; deltaY = Mesh.deltaY;
function [Coeff] = T_coeff(Mesh,Data,Wall,C_Coeff,Tp_n,t) % T_coeff: Finds the time-dependent coefficients for the % given parameters at each node in the main mesh % % INPUTS: % - Mesh: N [#] Number of nodes in axis X % M [#] Number of nodes in axis Y % DeltaX [m] Control volume's length (X) % DeltaY [m] Control volume's Height (Y) % deltaX [m] Central node's distances (X) % deltaY [m] Central node's distances (Y) % - Data: beta Explicit(1) or semi-explicit(0.5) coefficient % - Wall: K_g [W/m°K] Heat transfer coefficient between gas and right
side of the control volume % T_g [°C] Temperature of the gas at the right side of the
control volume % - C_Coeff: A_e Coefficient east node % A_w Coefficient west node % A_n Coefficient north node % A_s Coefficient south node % A_p Coefficient center node % A_p0 Coefficient time-step % b Resultant coefficient % - Tp_n: [°C] Temperature at prior time-step % - t: [s] Current time % % OUTPUTS: % - Coeff: A_e Coefficient east node % A_w Coefficient west node % A_n Coefficient north node % A_s Coefficient south node
Master Final Thesis Attachments Report
Cesar David Navas Prada 57
% A_p Coefficient center node % A_p0 Coefficient time-step % b Resultant coefficient % % Case: HEAT CONDUCTION TRANSFER % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
%% Paremeters Definition
N = Mesh.N; M = Mesh.M; DeltaX = Mesh.DeltaX; DeltaY = Mesh.DeltaY; deltaX = Mesh.deltaX; deltaY = Mesh.deltaY;
function [lambda_f] = lambdaf(Mesh,j,i,dir) %lambdaf: Finds the harmonic mean of thermal conductivity at each face % % INPUTS: % - Mesh: lambda_n [W/m°K] Thermal conductivity at each node % - j: Row variable (Y) % - i: Column variable(X) % - dir: Face where the harmonic mean is wanted % % OUTPUTS: % - lambda_f: [W/m°K] Harmonic mean at each face % % Case: HEAT CONDUCTION TRANSFER
Master Final Thesis Attachments Report
Cesar David Navas Prada 59
% Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
%% Parameter Definiton
lambda_n = Mesh.lambda_n;
%% Harmonic Mean
lamA = lambda_n(j,i);
if dir == "e"
lamB = lambda_n(j,i+1);
elseif dir == "w"
lamB = lambda_n(j,i-1);
elseif dir == "n"
lamB = lambda_n(j-1,i);
elseif dir == "s"
lamB = lambda_n(j+1,i);
else
error( "choose the correct direction")
end
f = 0.5; % Location factor (0.5 for node-centered meshes)
lambda_f = 1./(((1 - f)./lamA) + (f./lamB));
2.1.5.5. Temperature at Points
function [TP] = T_point(Mesh,Material,T,P) % T_point: Finds the temperature at a specific point in the domain % by using linear interpolation within the neighbor grid points % % INPUTS: % - Mesh: X [m] Nodes' position in axis X % Y [m] Nodes' position in axis Y % dx [m] Control volume's Lenght (X) % dy [m] Control volume's Height (Y) % - Material: P3 [m] Location of point 3 % - T: [°C] Temperature field matrix % - P: [m] Point at which is wanted the temperature %
Master Final Thesis Attachments Report
Cesar David Navas Prada 60
% OUTPUTS: % - TP: [°C] Temperature at the given point (P) % % Case: HEAT CONDUCTION TRANSFER % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
%% Parameters Definition
X = Mesh.X; Y = Mesh.Y; dx = Mesh.dx; dy = Mesh.dy;
P3 = Material.P3;
%% Locations
% Finding the closer nodes to the desired point
if P(1)/dx - floor(P(1)/dx) > 0 % In axis X
x1 = floor(P(1)/dx) + 2; x2 = x1;
else
x1 = (P(1)/dx) + 1; x2 = (P(1)/dx) + 2;
end
if floor(((P3(2)-P(2))/dy) - (floor((P3(2)-P(2))/dy))) > 0 % In axis Y
% Interpolation in the horizontal neighbor grid points Axis X Tx1 = interp1(X(y1,:),T(y1,:),X(y1,x1)); Tx2 = interp1(X(y2,:),T(y2,:),X(y2,x2));
% Interpolation in the vertical neighbor grid points Axis Y TP = interp1([Y(y1,x1) Y(y2,x2)],[Tx1 Tx2], P(2));
Master Final Thesis Attachments Report
Cesar David Navas Prada 61
2.2. Fractional Step Method Generic Algorithms
2.2.1. R(u) Vector
function [R_u] = Ru(Mesh,Re,u,v,rho,sc) % Ru: Finds the vector R(u) for horizontal velocities % % INPUTS: % - Mesh: N [#] Total nodes in axis X % M [#] Total nodes in axis Y % DeltaXu [m] Velocity Ux control volume's length (X) % DeltaYu [m] Velocity Ux control volume's Height (Y) % deltaXu [m] Velocity Ux central node's distances (X) % deltaYu [m] Velocity Ux central node's distances (Y) % - Re [~]: Reynolds Number % - u [m/s]: Velocity in axis X % - v [m/s]: Velocity in axis Y % - rho [Kg/m^3]: Fluid's Density % - sc: Numerical Scheme % % OUTPUTS: % - R_u: R(u) vector of horizontal velocity Ux % % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
function [R_v] = Rv(Mesh,Re,u,v,rho,sc) % Rv: Finds the vector R(v) for vertical velocities % % INPUTS: % - Mesh: N [#] Total nodes in axis X % M [#] Total nodes in axis Y % DeltaXv [m] Velocity Vy control volume's length (X) % DeltaYv [m] Velocity Vy control volume's Height (Y) % deltaXv [m] Velocity Vy central node's distances (X) % deltaYv [m] Velocity Vy central node's distances (Y) % - Re [~]: Reynolds Number % - u [m/s]: Velocity in axis X % - v [m/s]: Velocity in axis Y % - rho [Kg/m^3]: Fluid's Density % - sc: Numerical Scheme % % OUTPUTS: % - R_v: R(v) vector of vertical velocity Vy % % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
Poisson(Mesh,coeff_P,d_t,u_star,v_star,errorP,rho,P_0) % Poisson: Solves the Poisson equation to find the pressure field % % INPUTS: % - Mesh: N [#] Total nodes in axis X % M [#] Total nodes in axis Y % DeltaXp [m] Pressure control volume's length (X) % DeltaYp [m] Pressure control volume's Height (Y) % - CoeffP: A_ep Pressure coefficient east node % A_wp Pressure coefficient west node % A_np Pressure coefficient north node % A_sp Pressure coefficient south node % A_pp Pressure coefficient center node % b_p Pressure resultant coefficient % - d_t [s]: Time-step % - u_star [m/s]: Intermediate Velocity in axis X % - v_star [m/s]: Intermediate Velocity in axis Y % - errorP: Convergence criteria for pressure iteration % - rho [Kg/m^3]: Fluid's Density % - P_0 [Pa]: Pressure field at prior time-step % % OUTPUTS: % - P [Pa]: Pressure Field % - gradx_P [Pa/m]: Pressure gradient at each node in axis X % - grady_P [Pa/m]: Pressure gradient at each node in axis Y % % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
%% Parameters Definiton
M = Mesh.M; N = Mesh.N; DeltaX = Mesh.DeltaXp; DeltaY = Mesh.DeltaYp;
function [velmod,up,vp,midup,midvp] = vel2P(Mesh,u,v) % vel2P: Finds the module of the velocity in each pressure node, % its components Ux and Vy, and the value Ux, Vy in the middle
line % % INPUTS: % - Mesh: N [#] Total nodes in axis X % M [#] Total nodes in axis Y % - u [m/s]: Velocity in axis X % - v [m/s]: Velocity in axis Y % % OUTPUTS: % - velmod [m/s]: Velocity Module at each node % - up [m/s]: Velocity in axis X at pressure nodes % - vp [m/s]: Velocity in axis Y at pressure nodes % - midup [m/s]: Ux Velocity in the middle vertical line % - midvp [m/s]: Vy Velocity in the middle horizontal line % % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
% Ux at main nodes if i == 1 up(j,i) = u(j,i); elseif i == N up(j,i) = u(j,i-1); else up(j,i) = (u(j,i) + u(j,i-1))/2; end
% Vy at main nodes if j == 1 vp(j,i) = v(j,i); elseif j == M vp(j,i) = v(j-1,i); else vp(j,i) = (v(j,i) + v(j-1,i))/2; end
% Ux at middle vertical line if i == floor(N/2)+1
midup(j) = up(j,i);
end
% Vy at middle horizontal line if j == floor(M/2)+1
midvp(i) = vp(j,i);
end
% Velocity module at main nodes velmod(j,i) = sqrt((up(j,i))^2+(vp(j,i))^2);
end end
Master Final Thesis Attachments Report
Cesar David Navas Prada 68
2.2.5. Driven Cavity
2.2.5.1. Main Code
clear close all tic
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%% DRIVEN CAVITY %%%%%%%%%%%%%%% %%%%%%%%%% Cesar David Navas Prada %%%%%%%%%% %%%%%%%%%%%%%%%% MAIN SCRIPT %%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%% Input Parameters
Re = 1000; % [~] Reynolds Number rho = 1; % [Kg/m^3] Density L = 1; % [m] length in axis X H = 1; % [m] Hight in axis Y sc = "upwind"; % Numerical Scheme ( upwind, upwind2, quick, fromm,
smart)
%% Mesh
Mesh = mesh(L,H,11,11);
%% Wall and inital conditions
u_top = 1; % Horizontal velocity Ux at the top u_walls = 0; % Wall velocity condition (no-slip)
% Velocity at middle line data fileID = fopen('midvel_CDNP.txt','w'); fprintf(fileID,'%s\t\t%s\t\t%s\n',' Y',' U',' V'); fprintf(fileID,'%.4f\t%.4f\t%.4f\n',
function [Mesh] = mesh(L,H,n,m) % mesh: Creates a node-centered, structured, and staggered mesh for a % 2D case with dimensions (L by H) and (n by m) number of control % volumes % % INPUTS: % - Data: L [m] Length in Axis X % H [m] Height in Axis Y % n [#] Control volumes in axis X % m [#] Control volumes in axis Y % % OUTPUTS: % - Mesh: N [#] Number of nodes in axis X % M [#] Number of nodes in axis Y % n [#] Control volumes in axis X % m [#] Control volumes in axis Y % dx [m] delta X % dy [m] delta Y % Xp [m] Pressure nodes' position in axis X % Yp [m] Pressure nodes' position in axis Y % Xp_f [m] Pressure faces' position in axis X % Yp_f [m] Pressure faces' position in axis Y % DeltaXp [m] Pressure control volume's length (X) % DeltaYp [m] Pressure control volume's Height (Y) % deltaXp [m] Pressure central node's distances (X) % deltaYp [m] Pressure central node's distances (Y) % Xu [m] Velocity Ux nodes' position in axis X % Yu [m] Velocity Ux nodes' position in axis Y % Xu_f [m] Velocity Ux faces' position in axis X % Yu_f [m] Velocity Ux faces' position in axis Y % DeltaXu [m] Velocity Ux control volume's length (X) % DeltaYu [m] Velocity Ux control volume's Height (Y) % deltaXu [m] Velocity Ux central node's distances (X) % deltaYu [m] Velocity Ux central node's distances (Y) % Xv [m] Velocity Vy nodes' position in axis X % Yv [m] Velocity Vy nodes' position in axis Y % Xv_f [m] Velocity Vy faces' position in axis X % Yv_f [m] Velocity Vy faces' position in axis Y % DeltaXv [m] Velocity Vy control volume's length (X) % DeltaYv [m] Velocity Vy control volume's Height (Y) % deltaXv [m] Velocity Vy central node's distances (X) % deltaYv [m] Velocity Vy central node's distances (Y) % % Case: DRIVEN CAVITY % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
function [coeff_P] = coeffP(Mesh) % coeffP: Finds the non time-dependent (Constant) coefficients for the % given parameters at each pressure node in the main mesh % % INPUTS: % - Mesh: N [#] Total nodes in axis X % M [#] Total nodes in axis Y % DeltaXp [m] Pressure control volume's length (X) % DeltaYp [m] Pressure control volume's Height (Y) % deltaXp [m] Pressure central node's distances (X) % deltaYp [m] Pressure central node's distances (Y) % % OUTPUTS: % - Coeff_P: A_ep Pressure coefficient east node % A_wp Pressure coefficient west node % A_np Pressure coefficient north node % A_sp Pressure coefficient south node % A_pp Pressure coefficient center node % b_p Pressure resultant coefficient % % Case: DRIVEN CAVITY % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
figure plot(1:z-1,CD) xlabel('Iterations','Fontsize',18) ylabel('Cd','Fontsize',18) title(['Drag Coefficient Cd at Re = ' num2str(Re)],'Fontsize',16) axis([0 z 0 2])
figure plot(1:z-1,CL) xlabel('Iterations','Fontsize',18) ylabel('Cl','Fontsize',18) title(['Lift Coefficient Cl at Re = ' num2str(Re)],'Fontsize',16)
%% Saving Data
P2 = [Yp(:,1) P]; fileID = fopen('Pressure_CDNP.txt','w'); %Save the file with the
function [Mesh] = mesh(L,H,dx,dy) % mesh: Creates a node-centered, structured, and staggered mesh for a % 2D case with dimensions (L by H) and (n by m) number of control % volumes % % INPUTS: % - Data: L [m] Length in Axis X % H [m] Height in Axis Y % dx [m] Control volume's Lenght % dy [m] Control volume's Height % % OUTPUTS: % - Mesh: N [#] Number of nodes in axis X % M [#] Number of nodes in axis Y % n [#] Control volumes in axis X % m [#] Control volumes in axis Y % dx [m] Control volume's Lenght % dy [m] Control volume's Height % ND [#] Nodes inside the square cylinder in X % MD [#] Nodes inside the square cylinder in Y % Ncil [#] Node where square cylinder starts in X % Mcil [#] Node where square cylinder starts in Y % Xp [m] Pressure nodes' position in axis X % Yp [m] Pressure nodes' position in axis Y % Xp_f [m] Pressure faces' position in axis X % Yp_f [m] Pressure faces' position in axis Y % DeltaXp [m] Pressure control volume's length (X) % DeltaYp [m] Pressure control volume's Height (Y) % deltaXp [m] Pressure central node's distances (X) % deltaYp [m] Pressure central node's distances (Y) % Xu [m] Velocity Ux nodes' position in axis X % Yu [m] Velocity Ux nodes' position in axis Y % Xu_f [m] Velocity Ux faces' position in axis X % Yu_f [m] Velocity Ux faces' position in axis Y % DeltaXu [m] Velocity Ux control volume's length (X) % DeltaYu [m] Velocity Ux control volume's Height (Y) % deltaXu [m] Velocity Ux central node's distances (X) % deltaYu [m] Velocity Ux central node's distances (Y) % Xv [m] Velocity Vy nodes' position in axis X % Yv [m] Velocity Vy nodes' position in axis Y
Master Final Thesis Attachments Report
Cesar David Navas Prada 87
% Xv_f [m] Velocity Vy faces' position in axis X % Yv_f [m] Velocity Vy faces' position in axis Y % DeltaXv [m] Velocity Vy control volume's length (X) % DeltaYv [m] Velocity Vy control volume's Height (Y) % deltaXv [m] Velocity Vy central node's distances (X) % deltaYv [m] Velocity Vy central node's distances (Y) % % Case: SQUARE CYLINDER % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
%% Geometry of the mesh
n = L/dx; % Control volumes in axis X m = H/dy; % Control volumes in axis Y
%% Number of nodes
N = n + 2; %Number of nodes in axis X M = m + 2; %Number of nodes in axis Y
function [coeff_P] = coeffP(Mesh) % coeffP: Finds the non time-dependent (Constant) coefficients for the % given parameters at each pressure node in the main mesh % % INPUTS: % - Mesh: N [#] Total nodes in axis X % M [#] Total nodes in axis Y % ND [#] Nodes inside the square cylinder in X % MD [#] Nodes inside the square cylinder in Y % Ncil [#] Node where square cylinder starts in X % Mcil [#] Node where square cylinder starts in Y % DeltaXp [m] Pressure control volume's length (X) % DeltaYp [m] Pressure control volume's Height (Y) % deltaXp [m] Pressure central node's distances (X) % deltaYp [m] Pressure central node's distances (Y) % % OUTPUTS: % - Coeff_P: A_ep Pressure coefficient east node % A_wp Pressure coefficient west node
Master Final Thesis Attachments Report
Cesar David Navas Prada 94
% A_np Pressure coefficient north node % A_sp Pressure coefficient south node % A_pp Pressure coefficient center node % b_p Pressure resultant coefficient % % Case: SQUARE CYLINDER % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
CL = (Fy)/(rho*D*maxUx^2); CD = (Fx)/(rho*D*maxUx^2);
2.3. Burgers Equation
2.3.1. Main Code
clear close all %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%% BURGERS EQUATION %%%%%%%%%%%%% %%%%%%%%%% Cesar David Navas Prada %%%%%%%%%% %%%%%%%%%%%%%%%% MAIN SCRIPT %%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%% Input Parameters
Re = 40; % Reynolds number N = [20 100]; % Fourier modes C_k = [0.4523 0.05]; % Kolmogorov constant (LES) m = 2; % Energy Spectrum slope (LES)
% Time condition C1 = 0.01;
%% Iteration error = 1e-5; % Convergence criteria
Ek_DNS{1,length(N)} = [];
for i = 1:length(N)
dt = (C1*Re)/(N(i)^2); % Time-step
% Initial velocity condition u0 = 1./(1:N(i)); u = u0;
Master Final Thesis Attachments Report
Cesar David Navas Prada 99
if i == 1
% DNS Ek_DNS{i} = DNS(Re,N(i),dt,u0,u,error);
% LES Ek_LES = LES(C_k,Re,N(i),dt,u0,u,m,error);
else
%DNS Ek_DNS{i} = DNS(Re,N(i),dt,u0,u,error);
end
end
% Plotting figure
% DNS loglog(1:N(1), Ek_DNS{1},'r+-') % DNS, N = 20 hold on loglog(1:N(2), Ek_DNS{2},'k.--') % DNS, N = 100
% LES loglog(1:N(1), Ek_LES{1},'b*-.') % LES, N = 20, Ck = 0.4523 loglog(1:N(1), Ek_LES{2},'gx-.') % LES, N = 20, Ck = 0.05
% Slope m = -2 X=1:N(2); Y=X.^(-m); loglog(X,Y,'-.m')
ylabel('E_k') xlabel('k') title(['Energy Spectrum at Re = ' num2str(Re)],'Fontsize',16) legend('DNS ( N = 20 )','DNS ( N = 100 )', 'LES N = 20 C_K = 0.4523',
'LES N = 20 C_K = 0.05', 'Slope = -2','Location','best') grid on
2.3.2. DNS
function [Ek_DNS] = DNS(Re,N,dt,u0,u,error) % DNS: Solves the Burgers Equation using Direct Numerical Simulation
(DNS) % calcuating the convective term, the k-mode velocity and finally % giving as a result the Energy Spectrum. % % INPUTS: % - Re [~] Reynolds number % - N [#] Number of Fourier modes
Master Final Thesis Attachments Report
Cesar David Navas Prada 100
% - dt [s] Time-step % - u0 [~] Initial k-mode velocity % - u [~] Supossed k-mode velocity % - error [~] Convergence criteria % % OUTPUTS: % - Ek_DNS [~] DNS Energy Spectrum % % Case: BURGERS EQUATION % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya
fprintf('Time of convergence DNS, N = %d is %d [s]\n',N,toc)
Master Final Thesis Attachments Report
Cesar David Navas Prada 101
2.3.3. LES
function [Ek_LES] = LES(Ck,Re,N,dt,u0,u,m,error) % LES: Solves the Burgers Equation using Large-Eddy Simulation (LES) % calcuating the convective term, the k-mode velocity, viscosity
and % finally giving as a result the Energy Spectrum. % % INPUTS: % - Ck [~] Kolmogorov constant % - Re [~] Reynolds number % - N [#] Number of Fourier modes % - dt [s] Time-step % - u0 [~] Initial k-mode velocity % - u [~] Supossed k-mode velocity % - m [~] Energy Spectrum slope % - error [~] Convergence criteria % % OUTPUTS: % - Ek_LES [~] LES Energy Spectrum % % Case: BURGERS EQUATION % Student: Cesar David Navas Prada % University: Universitat Politecnica de Catalunya