30
Module EGM310 Introduction to Remote Sensing and GIS

Module EGM310
Introduction to Remote Sensing and GIS

Sound attenuation
Introduction • Attenuation is the reduction in amplitude and intensity of a signal with respect to distance travelled through a medium. • Attenuation can also be understood to be the opposite of amplification.
distance
ampl
itude
(a) Absorption
• As the acoustic pulse propagates through the water column and sub-surface, some of the energy is simply absorbed by the medium due to frictional effects.
• In general terms, the higher the frequency of the transmitted pulse, the higher the absorption rate.
• Absorption is also significantly stronger in saline water than in fresh water.
• Therefore - low frequency waves travel greater distances than high frequency waves.
• Is the perfect solution to always transmit low frequency
waves?

(b) Attenuation
• As the acoustic pulse is transmitted from the survey instrument, it spreads through spherical divergence – the distribution of wave energy on an increasing spherical surface during propagation.

• The sonar transmits a fixed amount of energy into the water in the form of the acoustic pulse.
• As the wave-front spreads in a spherical pattern, the intensity of the pulse falls with increasing distance (or range) from the source.
• The energy returning to the sonar is also effected by spherical spreading.
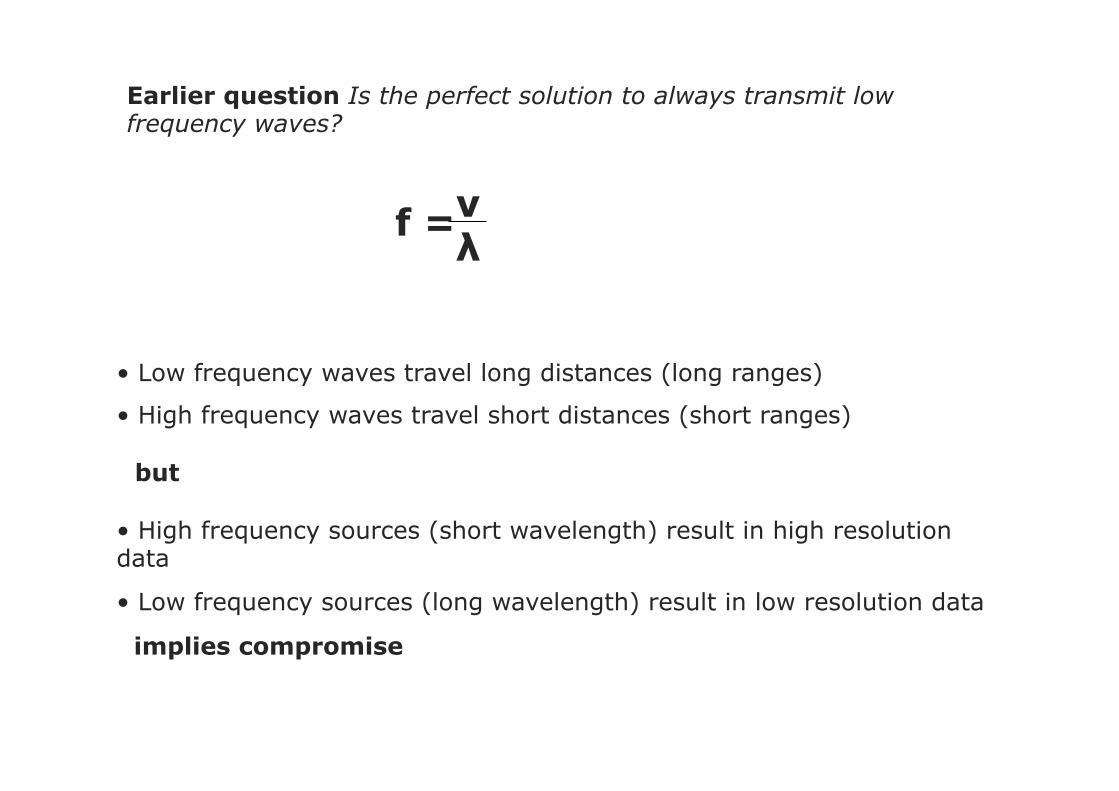
Earlier question Is the perfect solution to always transmit low frequency waves?
• Low frequency waves travel long distances (long ranges)
• High frequency waves travel short distances (short ranges)
f = v λ
• High frequency sources (short wavelength) result in high resolution data
• Low frequency sources (long wavelength) result in low resolution data
but
implies compromise
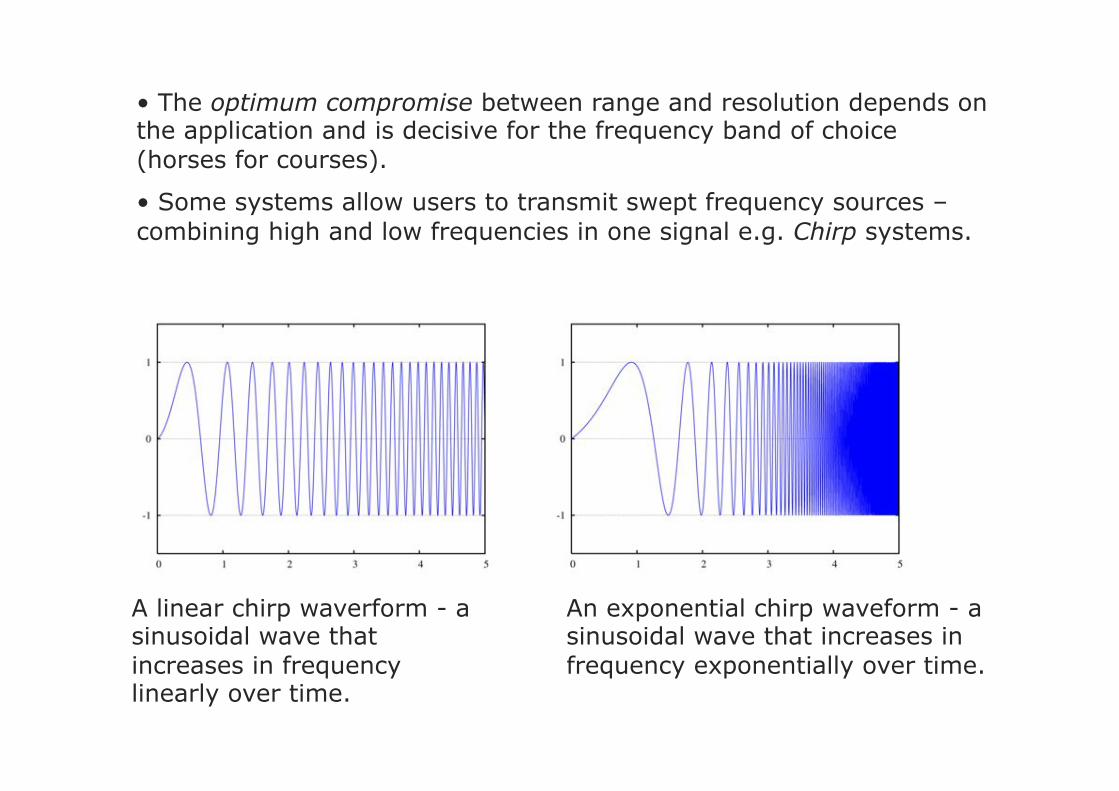
• The optimum compromise between range and resolution depends on the application and is decisive for the frequency band of choice (horses for courses).
• Some systems allow users to transmit swept frequency sources – combining high and low frequencies in one signal e.g. Chirp systems.
A linear chirp waverform - a sinusoidal wave that increases in frequency linearly over time.
An exponential chirp waveform - a sinusoidal wave that increases in frequency exponentially over time.
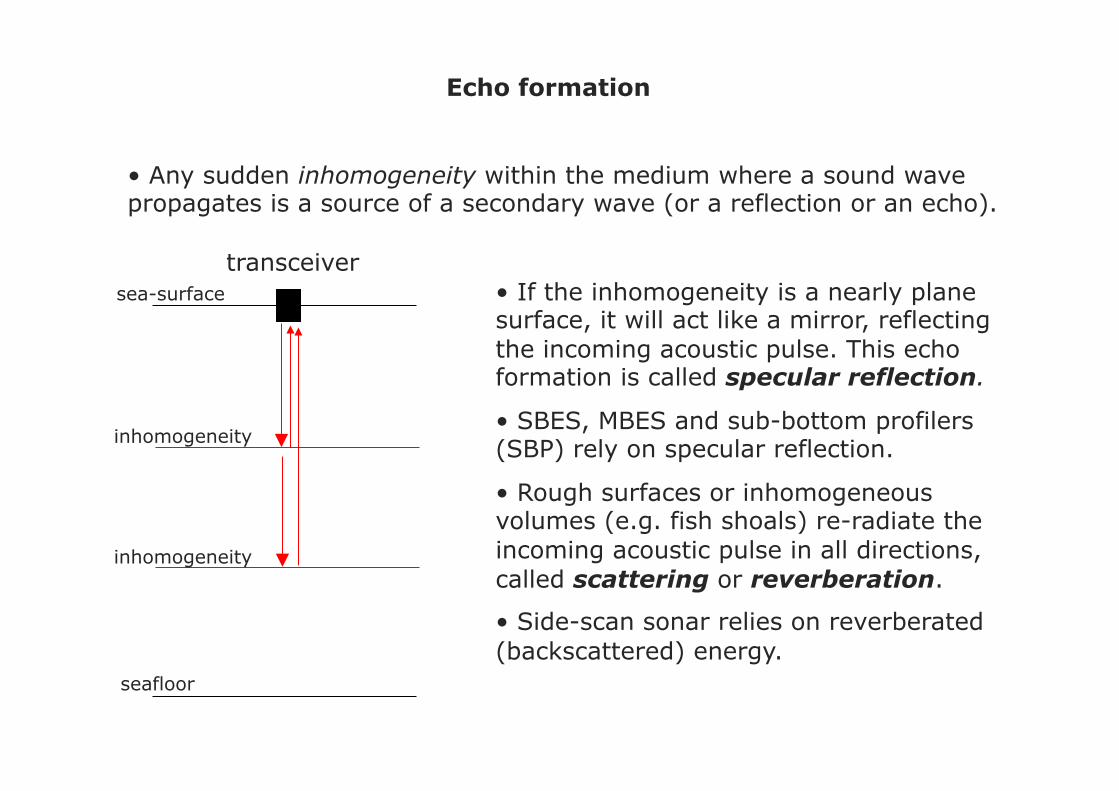
Echo formation
• Any sudden inhomogeneity within the medium where a sound wave propagates is a source of a secondary wave (or a reflection or an echo).
sea-surface
seafloor
transceiver
inhomogeneity
inhomogeneity
• If the inhomogeneity is a nearly plane surface, it will act like a mirror, reflecting the incoming acoustic pulse. This echo formation is called specular reflection.
• SBES, MBES and sub-bottom profilers (SBP) rely on specular reflection.
• Rough surfaces or inhomogeneous volumes (e.g. fish shoals) re-radiate the incoming acoustic pulse in all directions, called scattering or reverberation.
• Side-scan sonar relies on reverberated (backscattered) energy.
Acoustic Impedance
• Underwater sound (in contrast to complicated effects of light) simply discriminates objects from the surrounding water (or sediment) when an object or surface differs by its acoustic impedance (Z).
• Acoustic Impedance is the product of the density and velocity inside the medium:
Z = ρ V
• This means a change in density or velocity at an interface is often enough to produce an echo.
• However, a density increase can be compensated by a corresponding decrease in velocity to avoid a reflection, making an interface invisible to a sonar pulse (termed acoustically transparent.
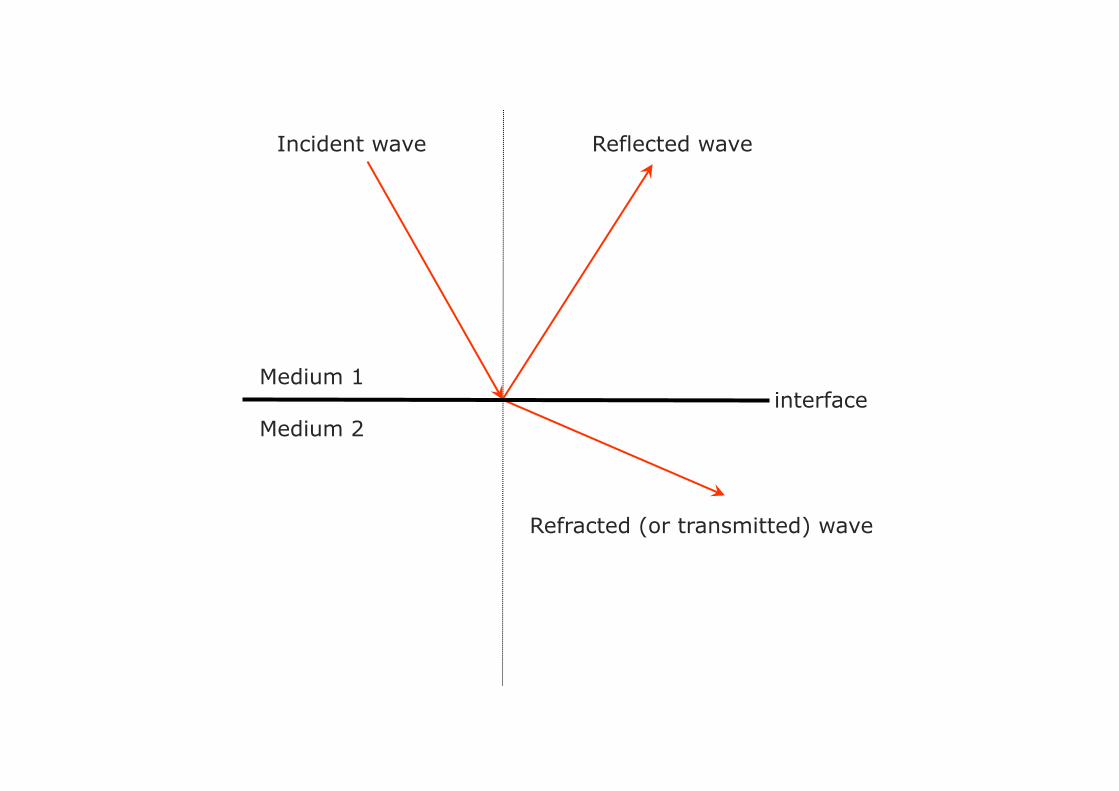
interface
Incident wave
Refracted (or transmitted) wave
Reflected wave
Medium 2
Medium 1

• For a reflection to occur, then Z1 ≠ Z2 • If Z1 = Z2 the interface is acoustically transparent
interface
Incident wave
Refracted (or transmitted) wave
Reflected wave
Medium 2: ρ2V2 = Z2
Medium 1: ρ1V1 = Z1

• The strength of the reflection at the interface is governed by the Reflection Coefficient (KR):
KR = Z2 - Z1
Z2 + Z1
ρ2VP2 - ρ1VP1
ρ2VP2 + ρ1VP1
=
• In simple terms, this equation states the larger the acoustic impedance contrast across an interface, the stronger the reflection.

Bathymetric+(sbes+&+mbes)+specular)reflec+on)
Side3scan+sonar))reverbera+on)
Seismic+(sub3bo7om)+reflec+on)and)refrac+on)
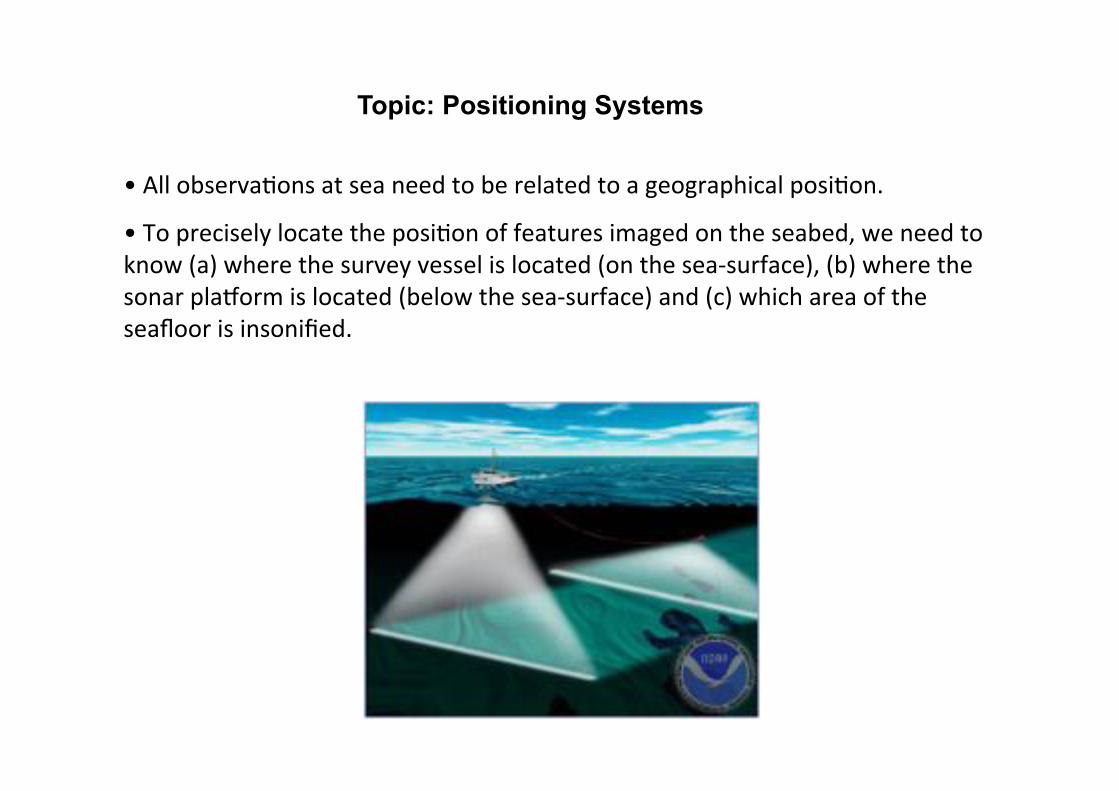
• "All"observa,ons"at"sea"need"to"be"related"to"a"geographical"posi,on.""
• "To"precisely"locate"the"posi,on"of"features"imaged"on"the"seabed,"we"need"to"know"(a)"where"the"survey"vessel"is"located"(on"the"sea@surface),"(b)"where"the"sonar"plaAorm"is"located"(below"the"sea@surface)"and"(c)"which"area"of"the"seafloor"is"insonified."
Topic: Positioning Systems

• "This"precise"posi,onal"data"is"given"by"a"combina,on"of"posi9on+fixing"(la,tude,"longitude"and"al,tude"above"a"reference"datum),"heading,"speed"and"a=tude"(heave,"roll,"pitch,"yaw)"informa,on.""
• "The"remainder"of"this"lecture"will"detail"the"techniques"used"for"measuring"the"posi,on"of"the"survey"vessel"at"the"sea@surface,"the"posi,on"of"the"sonar"plaAorm"(if"not"aEached"to"the"vessel)"and"their"rela,ve"varia,ons"in"aFtude."
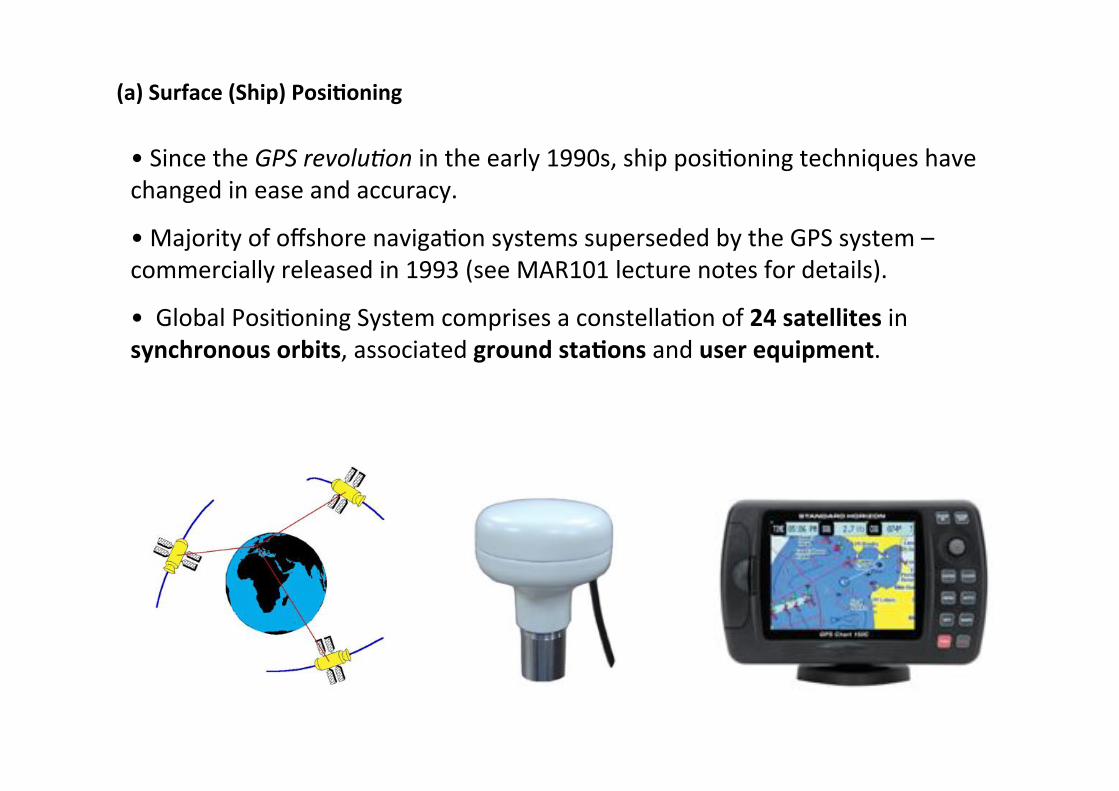
(a)+Surface+(Ship)+Posi9oning+
• "Since"the"GPS$revolu+on$in"the"early"1990s,"ship"posi,oning"techniques"have"changed"in"ease"and"accuracy."
• "Majority"of"offshore"naviga,on"systems"superseded"by"the"GPS"system"–"commercially"released"in"1993"(see"MAR101"lecture"notes"for"details)."
• ""Global"Posi,oning"System"comprises"a"constella,on"of"24+satellites"in"synchronous+orbits,"associated"ground+sta9ons"and"user+equipment."
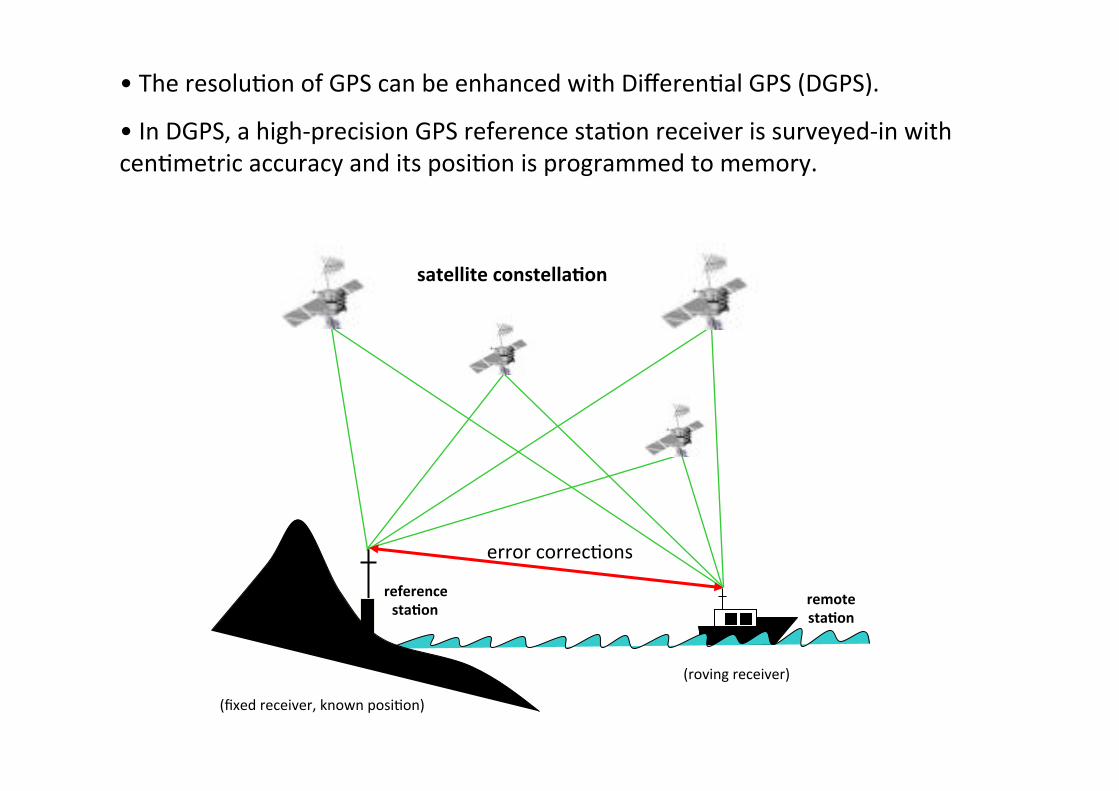
• "The"resolu,on"of"GPS"can"be"enhanced"with"Differen,al"GPS"(DGPS)."
• "In"DGPS,"a"high@precision"GPS"reference"sta,on"receiver"is"surveyed@in"with"cen,metric"accuracy"and"its"posi,on"is"programmed"to"memory."""
reference+sta9on+
satellite+constella9on+
(fixed"receiver,"known"posi,on)"
remote+sta9on+
(roving"receiver)"
error"correc,ons"

• "The"reference"sta,on"calculates"its"posi,on"using"the"same"satellites"as"the"ship."
• "As"the"reference"sta,on"knows"its"exact"posi,on"(pre@programmed),"it"can"iden,fy"errors"in"the"satellite"signal",me"measurement,"compute"a"correc,on"and"transmit"the"correc,on"to"the"roving"receiver"(survey"vessel)."""
• "Correc,ons"update"regularly"(typically"every"second)"and"broadcast"to"the"survey"vessel."
• "This"technique"works"because"the"satellite"signal",me"distor,on"is"almost"iden,cal"for"any"2"points"on"the"Earth"which"are"less"than"500km"apart."""

• "Differen,al"correc,ons"can"be"obtained"from"several"sources:"(a)"your"own"base"sta,on,"(b)"the"worldwide"network"of"DGPS"radio@beacons,"or"(c)"a"satellite"differen,al"service"provider.""
• "The"network"of"DGPS"radio@beacons"throughout"the"world"is"rapidly"expanding"and"the"signals"that"most"radio@beacons"transmit"are"free."
• "There"are"also"a"number"of"satellite"differen,al"service"provider"op,ons"including"subscrip,on"services"you"pay"for,"and"now"the"Wide"Area"Augmenta,on"System"(WAAS)"or"EGNOS"satellite"systems"for"the"US"and"Europe"respec,vely"that"will"improve"integrity,"accuracy"and"availability"of"GPS"for"users.""
• "For"very"high"precision"surveys,"sub@metre"DGPS"accuracy"is"not"enough."
• "That's"where"cen,metre@level"solu,ons"using"Real@Time"Kinema,c"(RTK)"can"provide"even"greater"accuracy."

[2] Instrumentation Platforms

Introduction
• Working at sea poses significant logistical and safety problems.
• The environment is difficult and susceptible to continual change.
• Decisions on the correct survey platform are therefore crucial to the successful completion of any project.
• The choice of platform is dependent on a variety of factors including the nature of the project requirements, depth of water, location of project (inshore, nearshore or offshore), duration of project and the deployment of equipment.
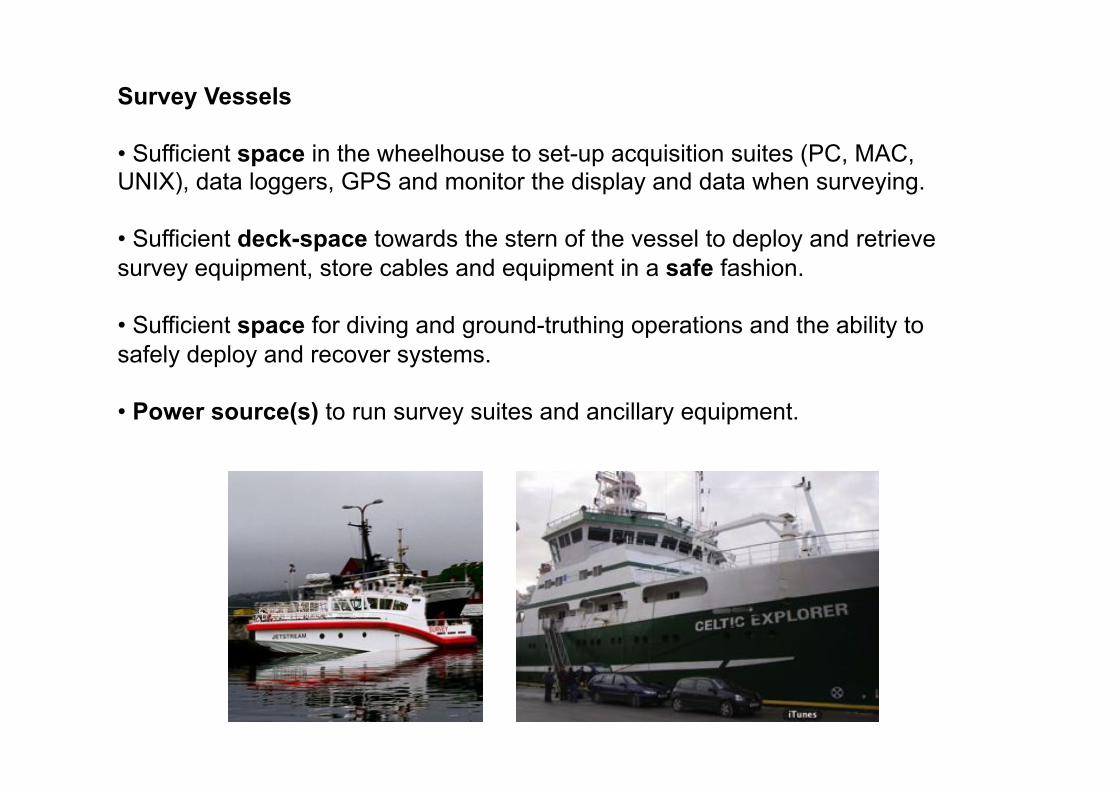
Survey Vessels • Sufficient space in the wheelhouse to set-up acquisition suites (PC, MAC, UNIX), data loggers, GPS and monitor the display and data when surveying. • Sufficient deck-space towards the stern of the vessel to deploy and retrieve survey equipment, store cables and equipment in a safe fashion. • Sufficient space for diving and ground-truthing operations and the ability to safely deploy and recover systems. • Power source(s) to run survey suites and ancillary equipment.



Søreide"and"Jasin
ski,"in"press"
ROV

AUV+

Manned Submersibles

break

















